
Publications
Probabilistic Labeling Cost for High-Accuracy Multi-view Reconstruction
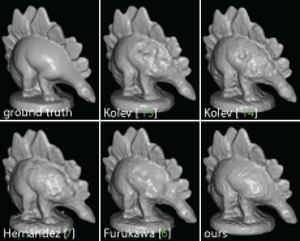
In this paper, we propose a novel labeling cost for multiview reconstruction. Existing approaches use data terms with specific weaknesses that are vulnerable to common challenges, such as low-textured regions or specularities. Our new probabilistic method implicitly discards outliers and can be shown to become more exact the closer we get to the true object surface. Our approach achieves top results among all published methods on the Middlebury DINO SPARSE dataset and also delivers accurate results on several other datasets with widely varying challenges, for which it works in unchanged form.
Level-of-Detail Quad Meshing
The most effective and popular tools for obtaining feature aligned quad meshes from triangular input meshes are based on cross field guided parametrization. These methods are incarnations of a conceptual three-step pipeline: (1) cross field computation, (2) field-guided surface parametrization, (3) quad mesh extraction. While in most meshing scenarios the user prescribes a desired target quad size or edge length, this information is typically taken into account from step 2 onwards only, but not in the cross field computation step. This turns into a problem in the presence of small scale geometric or topological features or noise in the input mesh: closely placed singularities are induced in the cross field, which are not properly reproducible by vertices in a quad mesh with the prescribed edge length, causing severe distortions or even failure of the meshing algorithm. We reformulate the construction of cross fields as well as field-guided parametrizations in a scale-aware manner which effectively suppresses densely spaced features and noise of geometric as well as topological kind. Dominant large-scale features are adequately preserved in the output by relying on the unaltered input mesh as the computational domain.
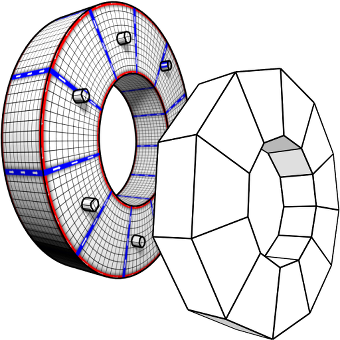
Dual Strip Weaving: Interactive Design of Quad Layouts using Elastica Strips

We introduce Dual Strip Weaving, a novel concept for the interactive design of quad layouts, i.e. partitionings of freeform surfaces into quadrilateral patch networks. In contrast to established tools for the design of quad layouts or subdivision base meshes, which are often based on creating individual vertices, edges, and quads, our method takes a more global perspective, operating on a higher level of abstraction: the atomic operation of our method is the creation of an entire cyclic strip, delineating a large number of quad patches at once. The global consistency-preserving nature of this approach reduces demands on the user’s expertise by requiring less advance planning. Efficiency is achieved using a novel method at the heart of our system, which automatically proposes geometrically and topologically suitable strips to the user. Based on this we provide interaction tools to influence the design process to any desired degree and visual guides to support the user in this task.
Interactive Simulation of Rigid Body Dynamics in Computer Graphics
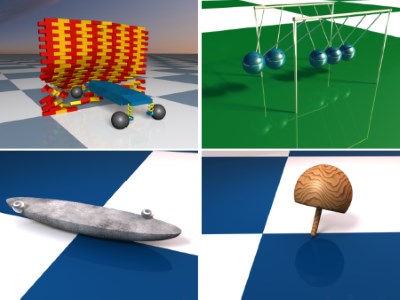
Interactive rigid body simulation is an important part of many modern computer tools, which no authoring tool nor game engine can do without. Such high performance computer tools open up new possibilities for changing how designers, engineers, modelers and animators work with their design problems. This paper is a self contained state-of-the-art report on the physics, the models, the numerical methods and the algorithms used in interactive rigid body simulation all of which have evolved and matured over the past 20 years. Furthermore, the paper communicates the mathematical and theoretical details in a pedagogical manner. This paper is not only a stake in the sand on what has been done, it also seeks to give the reader deeper insights to help guide their future research.
@article{BET2013,
title = "Interactive Simulation of Rigid Body Dynamics in Computer Graphics",
author = "Jan Bender and Kenny Erleben and Jeff Trinkle",
year = {2014},
volume = {33},
pages = {246--270},
number = {1},
journal = {Computer Graphics Forum},
doi = {10.1111/cgf.12272},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/cgf.12272}
}
A Survey on Position-Based Simulation Methods in Computer Graphics

The dynamic simulation of mechanical effects has a long history in computer graphics. The classical methods in this field discretize Newton's second law in a variety of Lagrangian or Eulerian ways, and formulate forces appropriate for each mechanical effect: joints for rigid bodies; stretching, shearing, or bending for deformable bodies; and pressure, or viscosity for fluids, to mention just a few. In the last years the class of position-based methods has become popular in the graphics community. These kinds of methods are fast, stable and controllable which make them well-suited for use in interactive environments. Position-based methods are not as accurate as force-based methods in general but they provide visual plausibility. Therefore, the main application areas of these approaches are virtual reality, computer games and special effects in movies.
This state-of-the-art report covers the large variety of position-based methods that were developed in the field of physically-based simulation. We will introduce the concept of position-based dynamics, present dynamic simulation based on shape matching and discuss data-driven upsampling approaches. Furthermore, we will present several applications for these methods.
@article{BMOTM2014,
title = "A Survey on Position-Based Simulation Methods in Computer Graphics",
author = "Jan Bender and Matthias M{\"{u}}ller and Miguel A. Otaduy and Matthias Teschner and Miles Macklin",
year = {2014},
volume = {33},
pages = {228--251},
number = {6},
journal = {Computer Graphics Forum},
doi = {10.1111/cgf.12346},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/cgf.12346}
}
Real-Time RGB-D based People Detection and Tracking for Mobile Robots and Head-Worn Cameras
We present a real-time RGB-D based multiperson detection and tracking system suitable for mobile robots and head-worn cameras. Our approach combines RGBD visual odometry estimation, region-of-interest processing, ground plane estimation, pedestrian detection, and multihypothesis tracking components into a robust vision system that runs at more than 20fps on a laptop. As object detection is the most expensive component in any such integration, we invest significant effort into taking maximum advantage of the available depth information. In particular, we propose to use two different detectors for different distance ranges. For the close range (up to 5-7m), we present an extremely fast depth-based upper-body detector that allows video-rate system performance on a single CPU core when applied to Kinect sensors. In order to cover also farther distance ranges, we optionally add an appearance-based full-body HOG detector (running on the GPU) that exploits scene geometry to restrict the search space. Our approach can work with both Kinect RGB-D input for indoor settings and with stereo depth input for outdoor scenarios. We quantitatively evaluate our approach on challenging indoor and outdoor sequences and show state-of-the-art performance in a large variety of settings. Our code is publicly available.
Scalable 6-DOF Localization on Mobile Devices
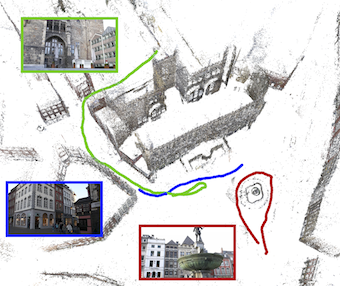
Recent improvements in image-based localization have produced powerful methods that scale up to the massive 3D models emerging from modern Structure-from-Motion techniques. However, these approaches are too resource intensive to run in real-time, let alone to be implemented on mobile devices. In this paper, we propose to combine the scalability of such a global localization system running on a server with the speed and precision of a local pose tracker on a mobile device. Our approach is both scalable and drift-free by design and eliminates the need for loop closure. We propose two strategies to combine the information provided by local tracking and global localization. We evaluate our system on a large-scale dataset of the historic inner city of Aachen where it achieves interactive framerates at a localization error of less than 50cm while using less than 5MB of memory on the mobile device.
The final publication will be available at link.springer.com upon publication.
@inproceedings{middelberg2014eccv,
author = "Middelberg, Sven and Sattler, Torsten and Untzelmann, Ole and Kobbelt, Leif",
title = "{Scalable 6-DOF Localization on Mobile Devices}",
booktitle = "{Proceedings of the 13th European Conference on Computer Vision (ECCV'14)}",
year = 2014
}
Efficient Enforcement of Hard Articulation Constraints in the Presence of Closed Loops and Contacts
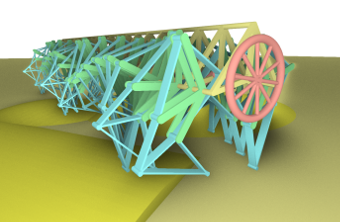
In rigid body simulation, one must distinguish between contacts (so-called unilateral constraints) and articulations (bilateral constraints). For contacts and friction, iterative solution methods have proven most useful for interactive applications, often in combination with Shock-Propagation in cases with strong interactions between contacts (such as stacks), prioritizing performance and plausibility over accuracy. For articulation constraints, direct solution methods are preferred, because one can rely on a factorization with linear time complexity for tree-like systems, even in ill-conditioned cases caused by large mass-ratios or high complexity. Despite recent advances, combining the advantages of direct and iterative solution methods wrt. performance has proven difficult and the intricacy of articulations in interactive applications is often limited by the convergence speed of the iterative solution method in the presence of closed kinematic loops (i.e. auxiliary constraints) and contacts. We identify common performance bottlenecks in the dynamic simulation of unilateral and bilateral constraints and are able to present a simulation method, that scales well in the number of constraints even in ill-conditioned cases with frictional contacts, collisions and closed loops in the kinematic graph. For cases where many joints are connected to a single body, we propose a technique to increase the sparsity of the positive definite linear system. A solution to these bottlenecks is presented in this paper to make the simulation of a wider range of mechanisms possible in real-time without extensive parameter tuning.
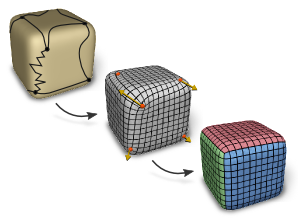
Adaptive Tetrahedral Meshes for Brittle Fracture Simulation

We present a method for the adaptive simulation of brittle fracture of solid objects based on a novel reversible tetrahedral mesh refinement scheme. The refinement scheme preserves the quality of the input mesh to a large extent, it is solely based on topological operations, and does not alter the boundary, i.e. any geometric feature. Our fracture algorithm successively performs a stress analysis and increases the resolution of the input mesh in regions of high tensile stress. This results in an accurate location of crack origins without the need of a general high resolution mesh which would cause high computational costs throughout the whole simulation. A crack is initiated when the maximum tensile stress exceeds the material strength. The introduced algorithm then proceeds by iteratively recomputing the changed stress state and creating further cracks. Our approach can generate multiple cracks from a single impact but effectively avoids shattering artifacts. Once the tensile stress decreases, the mesh refinement is reversed to increase the performance of the simulation. We demonstrate that our adaptive method is robust, scalable and computes highly realistic fracture results.
@INPROCEEDINGS{Koschier2014,
author = {Dan Koschier and Sebastian Lipponer and Jan Bender},
title = {Adaptive Tetrahedral Meshes for Brittle Fracture Simulation},
booktitle = {Proceedings of the 2014 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2014},
publisher = {Eurographics Association},
location = {Copenhagen, Denmark}
}
Efficient Modal Sound Synthesis on GPUs
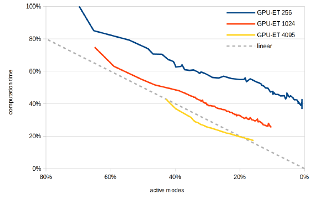
Modal sound synthesis is a useful method to interactively generate sounds for Virtual Environments. Forces acting on objects excite modes, which then have to be accumulated to generate the output sound. Due to the high audio sampling rate, algorithms using the CPU typically can handle only a few actively sounding objects. Additionally, force excitation should be applied at a high sampling rate. We present different algorithms to compute the synthesized sound using a GPU, and compare them to CPU implementations. The GPU algorithms shows a significantly higher performance, and allows many sounding objects simultaneously.
Innovative Mensch-Maschine Schnittstelle für Prüf- und Diagnosesysteme

Bisher wird die Mensch Maschine Schnittstelle (MMS) für Prüf- und Diagnosesoftware für die Automobilindustrie von Drittherstellern für spezifische Prüfprozesse nach uneinheitlichen und unsystematischen Maßgaben erstellt und zusammen mit entsprechender Hardware vermarktet. Anhand einer durchgeführten Vorstudie in 2012 bei einem Automobilhersteller wurde gezeigt, dass diese Maß-gaben leider eher selten die gewünschten Anforderungen an eine menschgerechte und benutzer-freundliche Gestaltung erfüllen. In dieser Arbeit soll anhand einer bekannten Methode neue Anforderungen an die MMS beim Diagnose- und Prüfbereich am Fließband in Hinblick auf Usability und Human Factors untersucht werden.
Quad Layout Embedding via Aligned Parameterization
Quad layouting, i.e. the partitioning of a surface into a coarse network of quadrilateral patches, is a fundamental step in application scenarios ranging from animation and simulation to reverse engineering and meshing. This process involves determining the layout's combinatorial structure as well as its geometric embedding in the surface. We present a novel quad layout algorithm that focuses on the embedding optimization, thereby complementing recent methods focusing on the structure optimization aspect. It takes as input a description of the target layout structure and computes a complete embedding in form of a parameterization globally optimized for isometry and, in particular, principal direction alignment. Besides being suited for fully automatic workflows, our method can also incorporate user constraints and support the tedious but common procedure of manual layouting.
Position-Based Simulation of Continuous Materials

We introduce a novel fast and robust simulation method for deformable solids that supports complex physical effects like lateral contraction, anisotropy or elastoplasticity. Our method uses a continuum-based formulation to compute strain and bending energies for two- and three-dimensional bodies. In contrast to previous work, we do not determine forces to reduce these potential energies, instead we use a position-based approach. This combination of a continuum-based formulation with a position-based method enables us to keep the simulation algorithm stable, fast and controllable while providing the ability to simulate complex physical phenomena lacking in former position-based approaches. We demonstrate how to simulate cloth and volumetric bodies with lateral contraction, bending, plasticity as well as anisotropy and proof robustness even in case of degenerate or inverted elements. Due to the continuous material model of our method further physical phenomena like fracture or viscoelasticity can be easily implemented using already existing approaches. Furthermore, a combination with other geometrically motivated methods is possible.
@ARTICLE{Bender2014,
author = {Jan Bender and Dan Koschier and Patrick Charrier and Daniel Weber},
title = {Position-Based Simulation of Continuous Materials},
journal = {Computers \& Graphics },
year = {2014},
volume = {44},
pages = {1 - 10},
number = {0},
doi = {http://dx.doi.org/10.1016/j.cag.2014.07.004},
issn = {0097-8493}
}
Quo Vadis CAVE – Does Immersive Visualization Still Matter?
More than two decades have passed since the introduction of the CAVE (Cave Automatic Virtual Environment), a landmark in the development of VR.1 The CAVE addressed two major issues with head-mounted displays of the era. First, it provided an unprecedented field of view, greatly improving the Feeling of presence in a virtual environment (VE). Second, this feeling was ampli ed because users didn’t have to rely on a virtual representation of their own bodies or parts thereof. Instead, they could physically enter the virtual space. Scientific visualization had been promulgated as a killer app for VR technology almost from day one. With the CAVE’s inception, it became possible to “put users within their data.” Proponents predicted two key advantages. First, immersive VR promised faster, more comprehensive understanding of complex, spatial relationships owing to head-tracked, stereoscopic rendering. Second, it would provide a more natural user interface, specifically for spatial interaction. In a seminal article, Andy van Dam and his colleagues proposed VR-enabled visualization as a midterm solution to the “accelerating data crisis.”2 That is, the ability to generate data had for some time outpaced the ability to analyze it. Over the years, a number of studies have investigated the effects of VR-based visualizations in speci c application scenarios. Recently, Bireswar Laha and his colleagues provided more general, empirical evidence for its bene fits. Although VR and scienti c visualization have matured and many of the original technical limitations have been resolved, immersive visualization has yet to nd the widespread, everyday use that was claimed in the early days. At the same time, the demand for scalable visualization solutions is greater than ever. If anything, the gap between data generation and analysis capabilities has widened even more. So, two questions arise. What should such scalable solutions look like, and what requirements arise regarding the underlying hardware and software and the overall methodology?
Preliminary Bone Sawing Model for a Virtual Reality-Based Training Simulator of Bilateral Sagittal Split Osteotomy
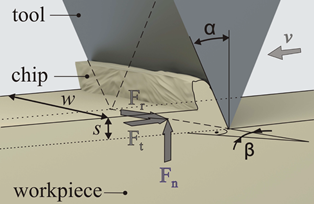
Successful bone sawing requires a high level of skill and experience, which could be gained by the use of Virtual Reality-based simulators. A key aspect of these medical simulators is realistic force feedback. The aim of this paper is to model the bone sawing process in order to develop a valid training simulator for the bilateral sagittal split osteotomy, the most often applied corrective surgery in case of a malposition of the mandible. Bone samples from a human cadaveric mandible were tested using a designed experimental system. Image processing and statistical analysis were used for the selection of four models for the bone sawing process. The results revealed a polynomial dependency between the material removal rate and the applied force. Differences between the three segments of the osteotomy line and between the cortical and cancellous bone were highlighted.
Virtuelle Realität als Gegenstand und Werkzeug der Wissenschaft
Dieser Beitrag stellt die Disziplin der Virtuellen Realität (VR) als eine wichtige Ausprägung von Virtualität vor. Die VR wird als eine spezielle Form der Mensch-Computer-Schnittstelle verstanden, die mehrere menschliche Sinne in die Interaktion einbezieht und beim Benutzer die Illusion hervorruft, eine computergenerierte künstliche Welt als real wahrzunehmen. Der Beitrag zeigt auf, dass umfangreiche Methodenforschung über mehrere Disziplinen hinweg notwendig ist um dieses ultimative Ziel zu erreichen oder ihm zumindest näher zu kommen. Schließlich werden drei unterschiedliche Anwendungen vorgestellt welche demonstrieren, auf welch vielfältige Art und Weise die VR als Werkzeug in den Wissenschaften eingesetzt werden kann.
Reorientation in Virtual Environments using Interactive Portals

Real walking is the most natural method of navigation in virtual environments. However, physical space limitations often prevent or complicate its continuous use. Thus, many real walking interfaces, among them redirected walking techniques, depend on a reorientation technique that redirects the user away from physical boundaries when they are reached. However, existing reorientation techniques typically actively interrupt the user, or depend on the application of rotation gain that can lead to simulator sickness. In our approach, the user is reoriented using portals. While one portal is placed automatically to guide the user to a safe position, she controls the target selection and physically walks through the portal herself to perform the reorientation. In a formal user study we show that the method does not cause additional simulator sickness, and participants walk more than with point-and-fly navigation or teleportation, at the expense of longer completion times.
Best Technote!
@INPROCEEDINGS{freitag2014,
author={S. Freitag and D. Rausch and T. Kuhlen},
booktitle={2014 IEEE Symposium on 3D User Interfaces (3DUI)},
title={{Reorientation in Virtual Environments Using Interactive Portals}},
year={2014},
pages={119-122},
doi={10.1109/3DUI.2014.6798852},
month={March},
}
Advanced Virtual Reality and Visualization Support for Factory Layout Planning
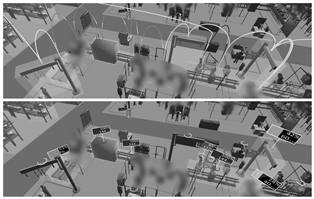
Recently, more and more Virtual Reality (VR) and visualization solutions to support the factory layout planning process have been presented. On the one hand, VR enables planners to create cost-effective virtual prototypes and to perform virtual walkthroughs, e.g., to verify proposed layouts. On the other hand, visualization helps to gain insight into simulation results that, e.g., describe the various interdependencies between machines, such as material flows. In order to create truly effective tools based on VR and visualization, the right techniques have to be chosen and adapted to the specific problem. However, the solutions published so far usually do not exploit these technologies to their full potential.
To address this situation, we present a VR-based planning assistant that offers advanced visualization functionality that furthers the understanding of planning-relevant parameters, while also relying on established techniques. In order to realize a useful approach, the assistant fulfills three central requirements:
- A smooth integration of the assistant into existing workflows is essential in order to not disrupt them. Consequently, existing tools need to be properly integrated and a mechanism for data exchange with these tools has to be provided.
- Visualization is the main means of facilitating insight. Instead of only displaying factory models, advanced techniques to visualize more abstract quantities, like material flows or process chains, have to be provided.
- VR systems vary in the degree of immersion they offer, ranging from non-immersive desktop systems to fully immersive Cave Automatic Virtual Environment (CAVE) systems. Scalability among these systems allows adapting high-end installations as well as cost-effective solutions. However, to ensure good scalability, devising a flexible system abstraction and a unified interaction concept are essential.
The base for our planning assistant is an immersive VR (IVR) system in form of a CAVE. Our solution allows performing virtual walkthroughs and offers additional visualization techniques for planning relevant data.
A 3D Collaborative Virtual Environment to Integrate Immersive Virtual Reality into Factory Planning Processes
In the recent past, efforts have been made to adopt immersive virtual reality (IVR) systems as a means for design reviews in factory layout planning. While several solutions for this scenario have been developed, their integration into existing planning workflows has not been discussed yet. From our own experience of developing such a solution, we conclude that the use of IVR systems-like CAVEs-is rather disruptive to existing workflows. One major reason for this is that IVR systems are not available everywhere due to their high costs and large physical footprint. As a consequence, planners have to travel to sites offering such systems which is especially prohibitive as planners are usually geographically dispersed. In this paper, we present a concept for integrating IVR systems into the factory planning process by means of a 3D collaborative virtual environment (3DCVE) without disrupting the underlying planning workflow. The goal is to combine non-immersive and IVR systems to facilitate collaborative walkthrough sessions. However, this scenario poses unique challenges to interactive collaborative work that to the best of our knowledge have not been addressed so far. In this regard, we discuss approaches to viewpoint sharing, telepointing and annotation support that are geared towards distributed heterogeneous 3DCVEs.
Geometrically Limited Constraints for Physics-based Haptic Rendering

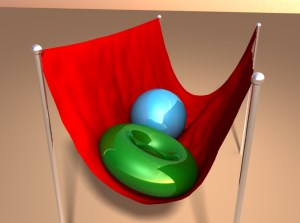
In this paper a single-point haptic rendering technique is proposed which uses a constraint-based physics simulation approach. Geometries are sampled using point shell points, each associated with a small disk, that jointly result in a closed surface for the whole shell. The geometric information is incorporated into the constraint-based simulation using newly introduced geometrically limited contact constraints which are active in a restricted region corresponding to the disks in contact. The usage of disk constraints not only creates closed surfaces, which is important for single-point rendering, but also tackles the problem of over-constraint contact situations in convex geometric setups. Furthermore, an iterative solving scheme for dynamic problems under consideration of the proposed constraint type is proposed. Finally, an evaluation of the simulation approach shows the advantages compared to standard contact constraints regarding the quality of the rendered forces.
Data-flow Oriented Software Framework for the Development of Haptic-enabled Physics Simulations
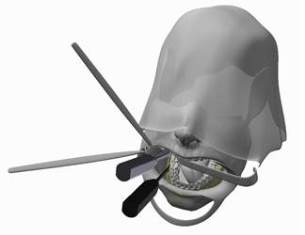
This paper presents a software framework that supports the development of haptic-enabled physics simulations. The framework provides tools aiming to facilitate a fast prototyping process by utilizing component and flow-oriented architectures, while maintaining the capability to create efficient code which fulfills the performance requirements induced by the target applications. We argue that such a framework should not only ease the creation of prototypes but also help to effectively and efficiently evaluate them. To this end, we provide analysis tools and the possibility to build problem oriented evaluation environments based on the described software concepts. As motivating use case, we present a project with the goal to develop a haptic-enabled medical training simulator for a maxillofacial procedure. With this example, we demonstrate how the described framework can be used to create a simulation architecture for a complex haptic simulation and how the tools assist in the prototyping process.
An Evaluation of a Smart-Phone-Based Menu System for Immersive Virtual Environments

System control is a crucial task for many virtual reality applications and can be realized in a broad variety of ways, whereat the most common way is the use of graphical menus. These are often implemented as part of the virtual environment, but can also be displayed on mobile devices. Until now, many systems and studies have been published on using mobile devices such as personal digital assistants (PDAs) to realize such menu systems. However, most of these systems have been proposed way before smartphones existed and evolved to everyday companions for many people. Thus, it is worthwhile to evaluate the applicability of modern smartphones as carrier of menu systems for immersive virtual environments. To do so, we implemented a platform-independent menu system for smartphones and evaluated it in two different ways. First, we performed an expert review in order to identify potential design flaws and to test the applicability of the approach for demonstrations of VR applications from a demonstrator's point of view. Second, we conducted a user study with 21 participants to test user acceptance of the menu system. The results of the two studies were contradictory: while experts appreciated the system very much, user acceptance was lower than expected. From these results we could draw conclusions on how smartphones should be used to realize system control in virtual environments and we could identify connecting factors for future research on the topic.
Integration of VR and Visualization Tools to Foster the Factory Planning Process
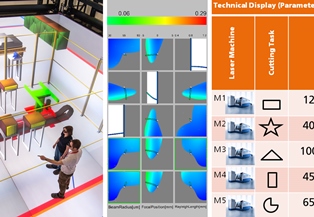
Recently, virtual reality (VR) and visualization have been increasingly employed to facilitate various tasks in factory planning processes. One major challenge in this context lies in the exchange of information between expert groups concerned with distinct planning tasks in order to make planners aware of inter-dependencies. For example, changes to the configuration of individual machines can have an effect on the overall production performance and vice versa. To this end, we developed VR- and visualization-based planning tools for two distinct planning tasks for which we present an integration concept that facilitates information exchange between these tools. The first application's goal is to facilitate layout planning by means of a CAVE system. The high degree of immersion offered by this system allows users to judge spatial relations in entire factories through cost-effective virtual walkthroughs. Additionally, information like material flow data can be visualized within the virtual environment to further assist planners to comprehensively evaluate the factory layout. Another application focuses on individual machines with the goal to help planners find ideal configurations by providing a visualization solution to explore the multi-dimensional parameter space of a single machine. This is made possible through the use of meta-models of the parameter space that are then visualized by means of the concept of Hyperslice. In this paper we present a concept that shows how these applications can be integrated into one comprehensive planning tool that allows for planning factories while considering factors of different planning levels at the same time. The concept is backed by Virtual Production Intelligence (VPI), which integrates data from different levels of factory processes, while including additional data sources and algorithms to provide further information to be used by the applications. In conclusion, we present an integration concept for VR- and visualization-based software tools that facilitates the communication of interdependencies between different factory planning tasks. As the first steps towards creating a comprehensive factory planning solution, we demonstrate the integration of the aforementioned two use-cases by applying VPI. Finally, we review the proposed concept by discussing its benefits and pointing out potential implementation pitfalls.
An Unusual Linker and an Unexpected Node: CaCl2 Dumbbells Linked by Proline to Form Square Lattice Networks
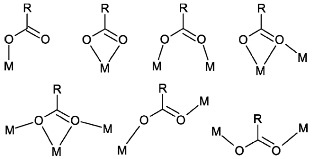
Four new structures based on CaCl2 and proline are reported, all with an unusual Cl–Ca–Cl moiety. Depending on the stoichiometry and the chirality of the amino acid, this metal dihalide fragment represents the core of a mononuclear Ca complex or may be linked by the carboxylate to form extended structures. A cisoid coordination of the halide atoms at the calcium cation is encountered in a chain polymer. In the 2D structures, CaCl2 dumbbells act as nodes and are crosslinked by either enantiomerically pure or racemic proline to form square lattice nets. Extensive database searches and topology tests prove that this structure type is rare for MCl2 dumbbells in general and unprecedented for Ca compounds.Four new structures based on CaCl2 and proline are reported, all with an unusual Cl–Ca–Cl moiety. Depending on the stoichiometry and the chirality of the amino acid, this metal dihalide fragment represents the core of a mononuclear Ca complex or may be linked by the carboxylate to form extended structures. A cisoid coordination of the halide atoms at the calcium cation is encountered in a chain polymer. In the 2D structures, CaCl2 dumbbells act as nodes and are crosslinked by either enantiomerically pure or racemic proline to form square lattice nets. Extensive database searches and topology tests prove that this structure type is rare for MCl2 dumbbells in general and unprecedented for Ca compounds.
@Article{Lamberts2014,
Title = {{An Unusual Linker and an Unexpected Node: CaCl2 Dumbbells Linked by Proline to Form Square Lattice Networks}},
Author = {Lamberts, Kevin and Porsche, Sven and Hentschel, Bernd and Kuhlen, Torsten and Englert, Ulli},
Journal = {CrystEngComm},
Year = {2014},
Pages = {3305-3311},
Volume = {16},
Doi = {10.1039/C3CE42357C},
Issue = {16},
Publisher = {The Royal Society of Chemistry},
Url = {http://dx.doi.org/10.1039/C3CE42357C}
}
The Human Brain Project - Chances and Challenges for Cognitive Systems
The Human Brain Project is one of the largest scientific initiatives dedicated to the research of the human brain worldwide. Over 80 research groups from a broad variety of scientific areas, such as neuroscience, simulation science, high performance computing, robotics, and visualization work together in this European research initiative. This work at hand will identify certain chances and challenges for cognitive systems engineering resulting from the HBP research activities. Beside the main goal of the HBP gathering deeper insights into the structure and function of the human brain, cognitive system research can directly benefit from the creation of cognitive architectures, the simulation of neural networks, and the application of these in context of (neuro-)robotics. Nevertheless, challenges arise regarding the utilization and transformation of these research results for cognitive systems, which will be discussed in this paper. Tools necessary to cope with these challenges are visualization techniques helping to understand and gain insights into complex data. Therefore, this paper presents a set of visualization techniques developed at the Virtual Reality Group at the RWTH Aachen University.
@inproceedings{Weyers2014,
author = {Weyers, Benjamin and Nowke, Christian and H{\"{a}}nel, Claudia and Zielasko, Daniel and Hentschel, Bernd and Kuhlen, Torsten},
booktitle = {Workshop Kognitive Systeme: Mensch, Teams, Systeme und Automaten},
title = {{The Human Brain Project – Chances and Challenges for Cognitive Systems}},
year = {2014}
}
Exploring the Usefulness of Two Variants of Gaze-Guiding-Based Dynamic Job Aid For Performing a Fixed Sequence Start Up Procedure After Longer Periods of Non-Use
Start-up procedures are non-routine tasks in process control, which are prone to skill decay. To mitigate skill decay, job performance aids (JPA) are used. A dynamic JPA was developed for the human-computer interface, which guides the gaze of the user by visual cues. Two gaze-guiding applications (spotlight, spotlight plus integration of information) were tested in terms of their impact in supporting the start-up performance after a three-week and six-month period of non-use (N = 46). Irrespective of the gaze-guiding format, participants with three weeks of non-use outperform participants with six months of non-use. Results show that the best indicator of skill loss is the length of the period of non-use. It is assumed that the advantage of gaze guiding plus integration of information was not shown due to the loss of interface-operating knowledge. In conclusion, gaze guiding for long periods of non-use needs to be accompanied by interface-operating knowledge.
Lattice-extended Coloured Petri Net Rewriting for Adaptable User Interface Models
Adaptable user interfaces (UI) have shown a great variety of advantages in human computer interaction compared to classic UI designs. We show how adaptable UIs can be built by introducing coloured Petri nets to connect the UI’s physical representation with the system to be controlled. UI development benefits from formal modelling approaches regarding the derived close integration of creation, execution, and reconfiguration of formal UI models. Thus, adaptation does not only change the physical representation, but also the connecting Petri net. For the latter transformation, we enhance the DPO rewriting formalism by using an order on the set of labels and softening the label-preserving property of morphisms, i.e., an element can also be mapped to another element if the label is larger. We use lattices to ensure correctness and state application conditions of rewriting steps. Finally we define an order compatible with our framework for the use in our implementation.
Interactive Volume Rendering for Immersive Virtual Environments
Immersive virtual environments (IVEs) are an appropriate platform for 3D data visualization and exploration as, for example, the spatial understanding of these data is facilitated by stereo technology. However, in comparison to desktop setups a lower latency and thus a higher frame rate is mandatory. In this paper we argue that current realizations of direct volume rendering do not allow for a desirable visualization w.r.t. latency and visual quality that do not impair the immersion in virtual environments. To this end, we analyze published acceleration techniques and discuss their potential in IVEs; furthermore, head tracking is considered as a main challenge but also a starting point for specific optimization techniques.
@inproceedings{Hanel2014,
author = {H{\"{a}}nel, Claudia and Weyers, Benjamin and Hentschel, Bernd and Kuhlen, Torsten W.},
booktitle = {IEEE VIS International Workshop on 3DVis: Does 3D really make sense for Data Visualization?},
title = {{Interactive Volume Rendering for Immersive Virtual Environments}},
year = {2014}
}
Zometool Shape Approximation
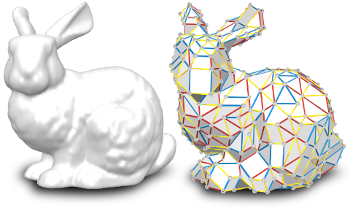
We present an algorithm that approximates 2-manifold surfaces with Zometool models while preserving their topology. Zometool is a~popular hands-on mathematical modeling system used in teaching, research and for recreational model assemblies at home. This construction system relies on a single node type with a small, fixed set of directions and only 9 different edge types in its basic form. While being naturally well suited for modeling symmetries, various polytopes or visualizing molecular structures, the inherent discreteness of the system poses difficult constraints on any algorithmic approach to support the modeling of freeform shapes. We contribute a set of local, topology preserving Zome mesh modification operators enabling the efficient exploration of the space of 2-manifold Zome models around a given input shape. Starting from a rough initial approximation, the operators are iteratively selected within a stochastic framework guided by an energy functional measuring the quality of the approximation. We demonstrate our approach on a number of designs and also describe parameters which are used to explore different complexities and enable coarse approximations.
Interactive Volume-Based Visualization and Exploration for Diffusion Fiber Tracking
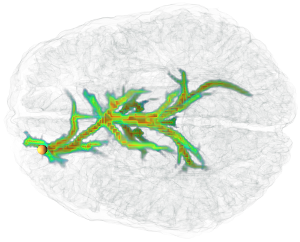
We present a new method to interactively compute and visualize fiber bundles extracted from a diffusion magnetic resonance image. It uses Dijkstra's shortest path algorithm to find globally optimal pathways from a given seed to all other voxels. Our distance function enables Dijkstra to generalize to larger voxel neighborhoods, resulting in fewer quantization artifacts of the orientations, while the shortest paths are still efficiently computable. Our volumetric fiber representation enables the usage of volume rendering techniques. Therefore no complicated pruning or analysis of the resulting fiber tree is needed in order to visualize important fibers. In fact, this can efficiently be done by changing a transfer function. Our application is highly interactive, allowing the user to focus completely on the exploration of the data.
Position-Based Rigid Body Dynamics
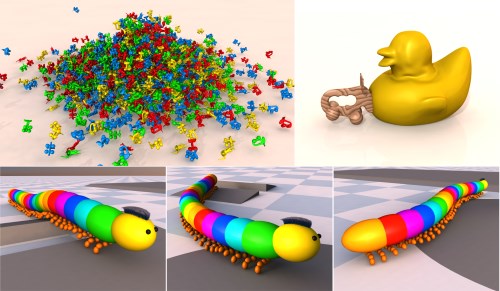
We propose a position-based approach for large-scale simulations of rigid bodies at interactive frame-rates. Our method solves positional constraints between rigid bodies and therefore integrates nicely with other position-based methods. Interaction of particles and rigid bodies through common constraints enables two-way coupling with deformables. The method exhibits exceptional performance and stability while being user-controllable and easy to implement. Various results demonstrate the practicability of our method for the resolution of collisions, contacts, stacking and joint constraints.
@ARTICLE{Deul2014,
author = {Deul, Crispin and Charrier, Patrick and Bender, Jan},
title = {Position-Based Rigid Body Dynamics},
journal = {Computer Animation and Virtual Worlds},
year = {2014},
doi = {10.1002/cav.1614},
issn = {1546-427X},
volume = {27},
number = {2},
pages = {103--112},
keywords = {real time, rigid-body dynamics, two-way coupling, position-based dynamics},
publisher = {John Wiley \& Sons, Ltd},
url = {http://dx.doi.org/10.1002/cav.1614}
}
Efficient Self-Shadowing Using Image-Based Lighting on Glossy Surfaces

In this paper we present a novel natural illumination approach for real-time rasterization-based rendering with environment map-based high dynamic range lighting. Our approach allows to use all kinds of glossiness values for surfaces, ranging continuously from completely diffuse up to mirror-like glossiness. This is achieved by combining cosine-based diffuse, glossy and mirror reflection models in one single lighting model. We approximate this model by filter functions, which are applied to the environment map. This results in a fast, image-based lookup for the different glossiness values which gives our technique the high performance that is necessary for real-time rendering. In contrast to existing real-time rasterization-based natural illumination techniques, our method has the capability of handling high gloss surfaces with directional self-occlusion. While previous works exchange the environment map by virtual point light sources in the whole lighting and shadow computation, we keep the full image information of the environment map in the lighting process and only use virtual point light sources for the shadow computation. Our technique was developed for the usage in real-time virtual prototyping systems for garments since here typically a small scene is lit by a large environment which fulfills the requirements for image-based lighting. In this application area high performance rendering techniques for dynamic scenes are essential since a physical simulation is usually running in parallel on the same machine. However, also other applications can benefit from our approach.
@inproceedings{Knuth2014,
author = {Martin Knuth and Christian Altenhofen and Arjan Kuijper and Jan Bender},
title = {Efficient Self-Shadowing Using Image-Based Lighting on Glossy Surfaces},
editor = {Jan Bender and Arjan Kuijper and Tatiana von Landesberger and Holger Theisel and Philipp Urban},
booktitle = {VMV 2014: Vision, Modeling & Visualization},
year = {2014},
publisher = {Eurographics Association}
}
Visualization of Memory Access Behavior on Hierarchical NUMA Architectures
The available memory bandwidth of existing high performance computing platforms turns out as being more and more the limitation to various applications. Therefore, modern microarchitectures integrate the memory controller on the processor chip, which leads to a non-uniform memory access behavior of such systems. This access behavior in turn entails major challenges in the development of shared memory parallel applications. An improperly implemented memory access functionality results in a bad ratio between local and remote memory access, and causes low performance on such architectures. To address this problem, the developers of such applications rely on tools to make these kinds of performance problems visible. This work presents a new tool for the visualization of performance data of the non-uniform memory access behavior. Because of the visual design of the tool, the developer is able to judge the severity of remote memory access in a time-dependent simulation, which is currently not possible using existing tools.
User Interface Design for Test and Diagnosis Software in Automotive Production Environments
In this paper, we present a first approach to a new test and diagnosis user interface (TDUI) as an application scenario for ambient intelligent systems in production environments, which represents one specific domain for urban areas. This method is based on a first evaluation study in 2012, identifying relevant requirements for the development of such TDUIs. It is planned to be implemented based on a formally defined Interaction Logic Layer (ILL), which connects the physical user interface layout with the test system. It allows the user to easily control and adapt the test and diagnosis application, to display and convey information characterizing the process state. Finally, this approach makes the TDUI implementation highly flexible and adaptive regarding the individual user and the requirements of the production environment.
Smart Museums–Exploiting Generative Virtual Museums
This paper describes a metadata-based tour recommendation approach for on-site museum and outdoor visits. Recommendations are calculated utilizing spatial exhibit distribution, museum layout, user and navigation profiles, additional constraints as well as art work descriptors. We propose a service-oriented architecture for generating 3D virtual museums as well as a WebSocket layer to process sensor data during the museum visit.
Towards an Evaluation of a Metadata Standard for Generative Virtual Museums
A methodology for evaluating the ViMCOX metadata format for designing virtual museums is discussed. Two evaluation approaches are presented, addressing (1) design aspects of virtual museums, the completeness of the metadata from the visitor’s point of view as well as measuring the acceptance of virtual museums and (2) a qualitative survey in collaboration with museum experts to identify metadata requirements and feature sets for curator tool implementations.
The Role of Assistive Technologies for Older Adults in Urban Areas
Research in the field of Ambient Assisted Living (AAL) introduces assistive technologies in various contexts, e.g., medical applications for clinics, or activities in home environments. Assistive technologies have the potential to help prevent isolation and lack of social support arising from a growing number of older adults living in single person households in urban areas. In order to examine the role of such technologies and identify challenges and potentials of systems and services, we investigated existing literature of the past decade. Whereas many contributions support the individual user or social connection, only few integrate location-based information or urban structures. Future research is confronted with a multitude of challenges, e.g. considering network technologies, market uptake or adaptation, and potentials, e.g. the support or establishing of social neighborhood structures. This literature review contributes in achieving an overview of the state of the art and research areas that will draw an increasing focus according to demographic change.
Creation of Adaptive User Interfaces Through Reconfiguration of User Interface Models Using an Algorithmic Rule Generation Approach
Inefficient and error-prone interaction between human operators and technical systems was the reason for various catastrophic accidents in the past. User interfaces implement the communication between a human user and a technical system which is the reason why inaccurate design of user interfaces has been identified as one major factor for those errors. The use of adaptive user interfaces is one possible solution to reduce inefficient interaction by adapting the user interface to a specific user, task, or context. However, currently no self-contained formal approach exists that allows for the creation of adaptive user interfaces despite various advantages of formal methods: interaction becomes verifiable, formal methods close the gap between modeling and implementation by using executable formal languages, and they allow for using existing rewriting concepts making formal models adaptable. This paper introduces a new approach to a formal rule generation concept, which enables a flexible creation of adaptive user interfaces. This concept is based on a formal modeling and reconfiguration approach for the creation and adaptation of user interfaces. The applicability of this approach will be shown through an implementation of an adaptive user interface for adaptive automation. The main contribution of the presented work is a new concept for rule generation that is capable of adapting formally modeled user interfaces.
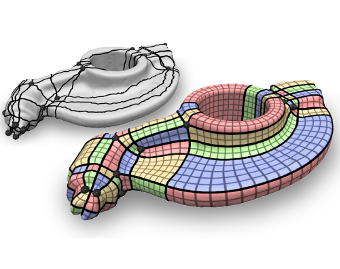
Zometool Rationalization of Freeform Surfaces
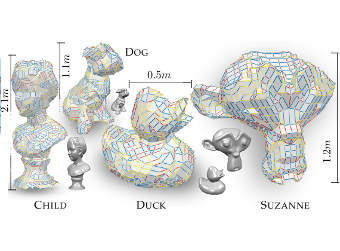
An ever broader availability of freeform designs together with an increasing demand for product customization has lead to a rising interest in efficient physical realization of such designs, the trend toward personal fabrication. Not only large-scale architectural applications are (becoming increasingly) popular but also different consumer-level rapid-prototyping applications, including toy and 3D puzzle creation. In this work we present a method for do-it-yourself reproduction of freeform designs without the typical limitation of state-of-the-art approaches requiring manufacturing custom parts using semi-professional laser cutters or 3d printers. Our idea is based on a popular mathematical modeling system (Zometool) commonly used for modeling higher dimensional polyhedra and symmetric structures such as molecules and crystal lattices. The proposed method extends the scope of Zometool modeling to freeform, disk-topology surfaces. While being an efficient construction system on the one hand (consisting only of a single node type and 9 different edge types), this inherent discreteness of the Zometool system, on the other hand gives rise to a hard approximation problem. We base our method on a marching front approach, where elements are not added in a greedy sense, but rather whole regions on the front are filled optimally, using a set of problem specific heuristics to keep complexity under control.
Poster: Visualizing Geothermal Simulation Data with Uncertainty
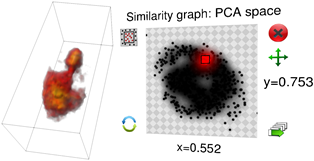
Simulations of geothermal reservoirs inherently contain uncertainty due to the fact that the underlying physical models are created from sparse data. Moreover, this uncertainty often cannot be completely expressed by simple key measures (e.g., mean and standard deviation), as the distribution of possible values is often not unimodal. Nevertheless, existing visualizations of these simulation data often completely neglect displaying the uncertainty, or are limited to a mean/variance representation. We present an approach to visualize geothermal simulation data that deals with both cases: scalar uncertainties as well as general ensembles of data sets. Users can interactively define two-dimensional transfer functions to visualize data and uncertainty values directly, or browse a 2D scatter plot representation to explore different possibilities in an ensemble.
Poster: Guided Tour Creation in Immersive Virtual Environments

Guided tours have been found to be a good approach to introducing users to previously unknown virtual environments and to allowing them access to relevant points of interest. Two important tasks during the creation of guided tours are the definition of views onto relevant information and their arrangement into an order in which they are to be visited. To allow a maximum of flexibility an interactive approach to these tasks is desirable. To this end, we present and evaluate two approaches to the mentioned interaction tasks in this paper. The first approach is a hybrid 2D/3D interaction metaphor in which a tracked tablet PC is used as a virtual digital camera that allows to specify and order views onto the scene. The second one is a purely 3D version of the first one, which does not require a tablet PC. Both approaches were compared in an initial user study, whose results indicate a superiority of the 3D over the hybrid approach.
@InProceedings{Pick2014,
Title = {{P}oster: {G}uided {T}our {C}reation in {I}mmersive {V}irtual {E}nvironments},
Author = {Sebastian Pick and Andreas B\"{o}nsch and Irene Tedjo-Palczynski and Bernd Hentschel and Torsten Kuhlen},
Booktitle = {IEEE Symposium on 3D User Interfaces (3DUI), 2014},
Year = {2014},
Month = {March},
Pages = {151-152},
Doi = {10.1109/3DUI.2014.6798865},
Url = {http://ieeexplore.ieee.org/xpl/abstractReferences.jsp?arnumber=6798865}
}
Poster: Interactive 3D Force-Directed Edge Bundling on Clustered Edges
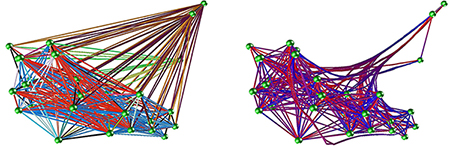
Graphs play an important role in data analysis. Especially, graphs with a natural spatial embedding can benefit from a 3D visualization. But even more then in 2D, graphs visualized as intuitively readable 3D node-link diagrams can become very cluttered. This makes graph exploration and data analysis difficult. For this reason, we focus on the challenge of reducing edge clutter by utilizing edge bundling. In this paper we introduce a parallel, edge cluster based accelerator for the force-directed edge bundling algorithm presented in [Holten2009]. This opens up the possibility for user interaction during and after both the clustering and the bundling.
Interactive Definition of Discrete Color Maps for Volume Rendered Data in Immersive Virtual Environments
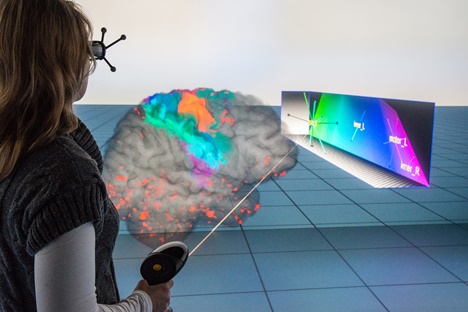
The visual discrimination of different structures in one or multiple combined volume data sets is generally done with individual transfer functions that can usually be adapted interactively. Immersive virtual environments support the depth perception and thus the spatial orientation in these volume visualizations. However, complex 2D menus for elaborate transfer function design cannot be easily integrated. We therefore present an approach for changing the color mapping during volume exploration with direct volume interaction and an additional 3D widget. In this way we incorporate the modification of a color mapping for a large number of discretely labeled brain areas in an intuitive way into the virtual environment. We use our approach for the analysis of a patient’s data with a brain tissue degenerating disease to allow for an interactive analysis of affected regions.
@inproceedings{Hanel2014a,
address = {Minneapolis},
author = {H{\"{a}}nel, Claudia and Freitag, Sebastian and Hentschel, Bernd and Kuhlen, Torsten},
booktitle = {2nd International Workshop on Immersive Volumetric Interaction (WIVI 2014) at IEEE Virtual Reality 2014},
editor = {Banic, Amy and O'Leary, Patrick and Laha, Bireswar},
title = {{Interactive Definition of Discrete Color Maps for Volume Rendered Data in Immersive Virtual Environments}},
year = {2014}
}
On The Impact of Spatial Heterogeneous Permeability Distributions on the Development of Free Convection Cells in the Perth Basin, Australia
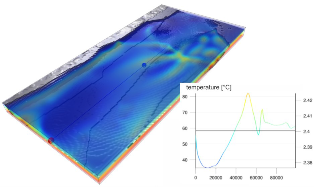
When dealing with free convection in a geothermal reservoir, it is preferable to detect regions of up flow, which locally increase the geothermal gradient. Free convection cells are likely to be found in a large reservoir layer (Yarragadee Aquifer), which is encountered in the entire Perth Basin, including the Perth Metropolitan Area (PMA). While the knowledge about the structure of the Perth Basin has been improved recently, the heterogeneity and spatial complexity of permeability was up till now mainly neglected. We set up a refined structural model of about 5000 km² comprising the region around the city of Perth up to a depth of 4.5 km, using an implicit modelling approach (3D GeoModeller by Intrepid Geophysics ). Based on the structural model we create a discretized numerical model for simulating fluid flow and heat transport in the Yarragadee Aquifer considering spatial heterogeneity of porosity and permeability. This heterogeneity is assessed by designing three different test cases: 1) constant porosity and permeability for the entire aquifer; 2) porosity and permeability decreasing with depth; 3) a conditional random permeability field within prescribed limits and for given correlation length. We calibrate a poro-perm relationship based on a fractal approach to the Yarragadee Aquifer, using over 100 measurement pairs of porosity and permeability from three boreholes. This data was also used for calibrating porosity decrease with depth, following Athy’s law. For the model with constant porosity and permeability, convection cells vary in size between 4 km and 6 km. Simulations with depth dependent decrease in porosity and permeability yielded a transition from conductive to convective heat transport in the Yarragadee Aquifer at a threshold permeability of around 1.7 × 10-15 m². There convection cells are much smaller, at the scale of 2.4 km to 3 km. Stochastic distributions of porosity and permeability in the Yarragadee cause the formation of convection cells to adjust to the permeability field, yielding a less distinct convection pattern. Where the Yarragadee Aquifer is in contact with overlying aquifers, stable regions of down flow develop. These in turn have a strong impact on the regional flow field and therefore on the temperature distribution. Temperatures drop to about 40 °C in 2 km depth. In order to improve the reliability of the model, as well as identification and comparison of convection cells in different simulations, we are developing a specialized visualization tool tailored to this purpose. By using tools like particle tracing and direct volume rendering, the recognition of the spatial distribution of convection cells and their change in the different cases facilitated.
Software Phantom with Realistic Speckle Modeling for Validation of Image Analysis Methods in Echocardiography
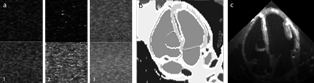
Computer-assisted processing and interpretation of medical ultrasound images is one of the most challenging tasks within image analysis. Physical phenomena in ultrasonographic images, e.g., the characteristic speckle noise and shadowing effects, make the majority of standard methods from image analysis non optimal. Furthermore, validation of adapted computer vision methods proves to be difficult due to missing ground truth information. There is no widely accepted software phantom in the community and existing software phantoms are not flexible enough to support the use of specific speckle models for different tissue types, e.g., muscle and fat tissue. In this work we propose an anatomical software phantom with a realistic speckle pattern simulation to fill this gap and provide a flexible tool for validation purposes in medical ultrasound image analysis. We discuss the generation of speckle patterns and perform statistical analysis of the simulated textures to obtain quantitative measures of the realism and accuracy regarding the resulting textures.
Interactive 3D Visualization of Structural Changes in the Brain of a Person With Corticobasal Syndrome
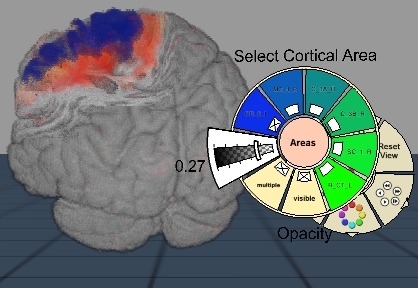
The visualization of the progression of brain tissue loss in neurodegenerative diseases like corticobasal syndrome (CBS) can provide not only information about the localization and distribution of the volume loss, but also helps to understand the course and the causes of this neurodegenerative disorder. The visualization of such medical imaging data is often based on 2D sections, because they show both internal and external structures in one image. Spatial information, however, is lost. 3D visualization of imaging data is capable to solve this problem, but it faces the difficulty that more internally located structures may be occluded by structures near the surface. Here, we present an application with two designs for the 3D visualization of the human brain to address these challenges. In the first design, brain anatomy is displayed semi-transparently; it is supplemented by an anatomical section and cortical areas for spatial orientation, and the volumetric data of volume loss. The second design is guided by the principle of importance-driven volume rendering: A direct line-of-sight to the relevant structures in the deeper parts of the brain is provided by cutting out a frustum-like piece of brain tissue. The application was developed to run in both, standard desktop environments and in immersive virtual reality environments with stereoscopic viewing for improving the depth perception. We conclude that the presented application facilitates the perception of the extent of brain degeneration with respect to its localization and affected regions.
@article{Hanel2014b,
author = {H{\"{a}}nel, Claudia and Pieperhoff, Peter and Hentschel, Bernd and Amunts, Katrin and Kuhlen, Torsten},
issn = {1662-5196},
journal = {Frontiers in Neuroinformatics},
number = {42},
pmid = {24847243},
title = {{Interactive 3D visualization of structural changes in the brain of a person with corticobasal syndrome.}},
url = {http://journal.frontiersin.org/article/10.3389/fninf.2014.00042/abstract},
volume = {8},
year = {2014}
}
Dynamiksimulation in der Computergraphik
Die physikalisch-basierte Simulation von Starrkörpern und deformierbaren Festkörpern ist ein wichtiges und aktuelles Forschungsgebiet in der Computergraphik und ein essentieller Bestandteil in vielen Anwendungen, wie z.B. Virtual Prototyping, Computeranimationen, Spiele, Spezialeffekte in Filmen oder Trainingssimulatoren. Dabei stehen oft interaktive Simulationen im Vordergrund, in denen ein Benutzer in Echtzeit mit den simulierten Körpern interagieren kann. Dadurch werden hohe Anforderungen an die Geschwindigkeit und Stabilität der Simulationsverfahren gestellt.
In dieser Arbeit werden interaktive Simulationsmethoden für Mehrkörpersysteme, Textilien und inkompressible deformierbare Volumenkörper vorgestellt. Außerdem wird gezeigt, wie die Simulation durch den Einsatz GPU-basierter Methoden deutlich beschleunigt werden kann.
@PhdThesis{Bender2014,
type={Habilitation},
author = {Jan Bender},
title = {Dynamiksimulation in der Computergraphik},
school = {Karlsruhe Institute of Technology (KIT), Germany},
year = {2014},
month = jan,
doi = {10.5445/KSP/1000040123}
}
Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images
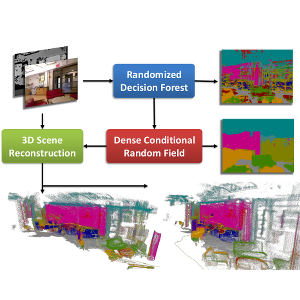
Dense semantic segmentation of 3D point clouds is a challenging task. Many approaches deal with 2D semantic segmentation and can obtain impressive results. With the availability of cheap RGB-D sensors the field of indoor semantic segmentation has seen a lot of progress. Still it remains unclear how to deal with 3D semantic segmentation in the best way. We propose a novel 2D-3D label transfer based on Bayesian updates and dense pairwise 3D Conditional Random Fields. This approach allows us to use 2D semantic segmentations to create a consistent 3D semantic reconstruction of indoor scenes. To this end, we also propose a fast 2D semantic segmentation approach based on Randomized Decision Forests. Furthermore, we show that it is not needed to obtain a semantic segmentation for every frame in a sequence in order to create accurate semantic 3D reconstructions. We evaluate our approach on both NYU Depth datasets and show that we can obtain a significant speed-up compared to other methods.
@inproceedings{Hermans14ICRA,
author = {Alexander Hermans and Georgios Floros and Bastian Leibe},
title = {{Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images}},
booktitle = {International Conference on Robotics and Automation},
year = {2014}
}
Multiple Target Tracking for Marker-less Augmented Reality
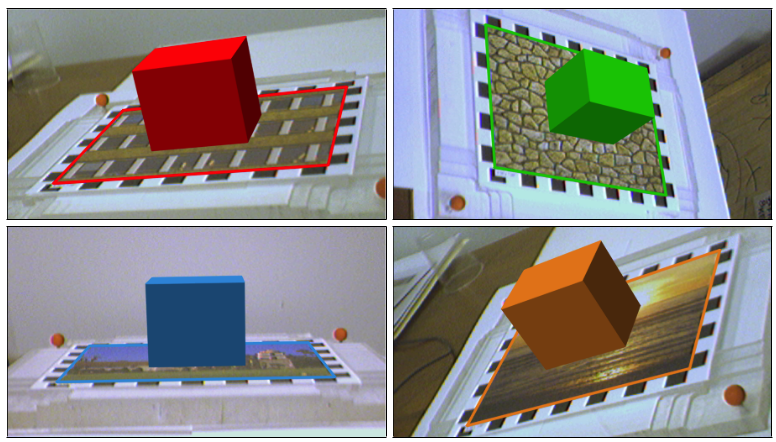
In this work, we implemented an AR framework for planar targets based on the ORB feature-point descriptor. The main components of the framework are a detector, a tracker and a graphical overlay. The detector returns a homography that maps the model- image onto the target in the camera-image. The homography is estimated from a set of feature-point correspondences using the Direct Linear Transform (DLT) algorithm and Levenberg-Marquardt (LM) optimization. The outliers in the set of feature-point correspondences are removed using RANSAC. The tracker is based on the Kalman filter, which applies a consistent dynamic movement on the target. In a hierarchical matching scheme, we extract additional matches from consecutive frames and perspectively transformed model-images, which yields more accurate and jitter-free homography estimations. The graphical overlay computes the six-degree-of-freedom (6DoF) pose from the estimated homography. Finally, to visualize the computed pose, we draw a cube on the surface of the tracked target. In the evaluation part, we analyze the performance of our system by looking at the accuracy of the estimated homography and the ratio of correctly tracked frames. The evaluation is based on the ground truth provided by two datasets. We evaluate most components of the framework under different target movements and lighting conditions. In particular, we proof that our framework is robust against considerable perspective distortion and show the benefit of using the hierarchical matching scheme to minimize jitter and improve accuracy.
A Flexible ASIP Architecture for Connected Components Labeling in Embedded Vision Applications
Real-time identification of connected regions of pixels in large (e.g. FullHD) frames is a mandatory and expensive step in many computer vision applications that are becoming increasingly popular in embedded mobile devices such as smart-phones, tablets and head mounted devices. Standard off-the-shelf embedded processors are not yet able to cope with the performance/flexibility trade-offs required by such applications. Therefore, in this work we present an Application Specific Instruction Set Processor (ASIP) tailored to concurrently execute thresholding, connected components labeling and basic feature extraction of image frames. The proposed architecture is capable to cope with frame complexities ranging from QCIF to FullHD frames with 1 to 4 bytes-per-pixel formats, while achieving an average frame rate of 30 frames-per-second (fps). Synthesis was performed for a standard 65nm CMOS library, obtaining an operating frequency of 350MHz and 2.1mm2 area. Moreover, evaluations were conducted both on typical and synthetic data sets, in order to thoroughly assess the achievable performance. Finally, an entire planar-marker based augmented reality application was developed and simulated for the ASIP.
Universalities in Fundamental Diagrams of Cars, Bicycles and Pedestrians
Since the pioneering work of Greenshields the fundamental diagram is used to characterize and describe the performance of traffic systems. During the last years the discussion and growing data base revealed the influence of human factors, traffic types or ways of measurements on this relation. The manifoldness of influences is important and relevant for applications but moves the discussion away from the main feature characterizing the transport properties of traffic systems. We focus again on the main feature by comparing the fundamental diagram of cars, bicycles and pedestrians moving in a row in a course with periodic boundaries. The underlying data are collected by three experiments, performed under well controlled laboratory conditions. In all experiments the setup in combination with technical equipment or methods of computer vision allowed to determine the trajectories with high precision. The trajectories visualized by space-time diagrams show three different states of motion (free flow state, jammed state and stop-and-go waves) in all these systems. Obviously the values of speed, density and flow of these three systems cover different ranges. However, after a simple rescaling of the velocity by the free speed and of the density by the length of the agents the fundamental diagrams conform regarding the position and height of the capacity. This indicates that the similarities between the systems go deeper than expected and offers the possibility of a universal model for heterogeneous traffic systems.
Universal flow-density relation of single-file bicycle, pedestrian and car motion
The relation between flow and density is an essential quantitative characteristic to describe the efficiency of traffic systems. We have performed experiments with single-file motion of bicycles and compared the results with previous studies for car and pedestrian motion in similar setups. In the space–time diagrams we observe three different states of motion (free flow state, jammed state and stop-and-go waves) in all these systems. Despite their obvious differences they are described by a universal fundamental diagram after proper rescaling of space and time which takes into account the size and free velocity of the three kinds of agents. This indicates that the similarities between the systems go deeper than expected.
Quad Layouts – Generation and Optimization of Conforming Quadrilateral Surface Partitions
The efficient, computer aided or automatic generation of quad layouts, i.e. the partitioning of an object’s surface into simple networks of conforming quadrilateral patches, is a task that – despite its importance and utility in Computer Graphics and Geometric Modeling – received relatively low attention in the past. As a consequence, this task is most often performed manually by well-trained experts in practice, where quad layouts are of particular interest for surface representation and parameterization tasks. Deeper analysis reveals the inherent complexity of this problem, which might be one of the underlying reasons for this situation. In this thesis we investigate the structure of the problem and the commonly relevant quality criteria. Based on this we develop novel efficient solution strategies and algorithms for the generation of high quality quad layouts. In particular, we present a fully automatic as well as an interactive pipeline for this task. Both are based on splitting the hard problem into sub-problems with a simpler structure each. For each sub-problem we design efficient, custom-tailored optimization algorithms motivated by the geometric nature of these problems. In this process we pay attention to compatibility, such that these algorithms can be applied in sequence, forming the stages of efficient quad layouting pipelines.
Previous Year (2013)
