
Publications
Fine-Tuning Image-Conditional Diffusion Models is Easier than You Think
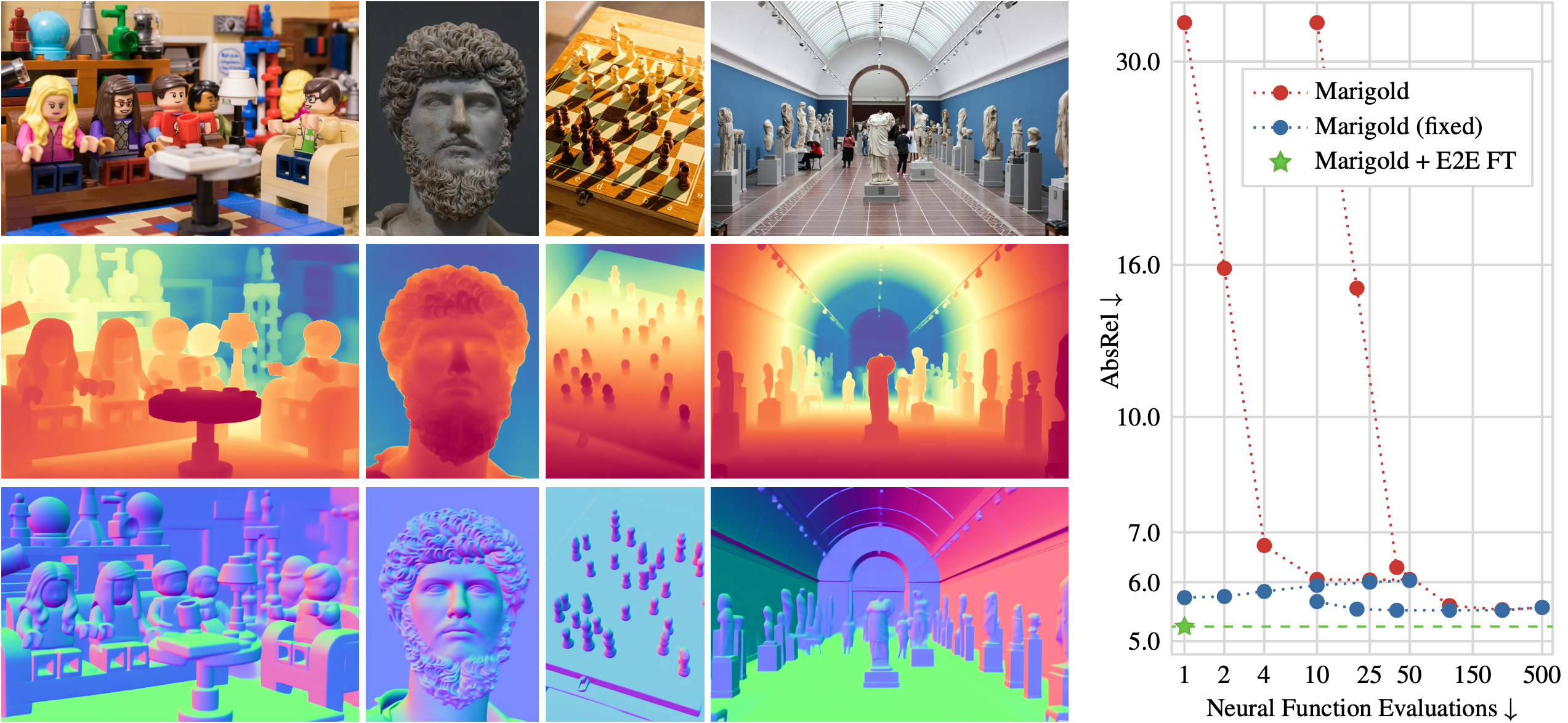
Recent work showed that large diffusion models can be reused as highly precise monocular depth estimators by casting depth estimation as an image-conditional image generation task. While the proposed model achieved state-of-the-art results, high computational demands due to multi-step inference limited its use in many scenarios. In this paper, we show that the perceived inefficiency was caused by a flaw in the inference pipeline that has so far gone unnoticed. The fixed model performs comparably to the best previously reported configuration while being more than 200x faster. To optimize for downstream task performance, we perform end-to-end fine-tuning on top of the single-step model with task-specific losses and get a deterministic model that outperforms all other diffusion-based depth and normal estimation models on common zero-shot benchmarks. We surprisingly find that this fine-tuning protocol also works directly on Stable Diffusion and achieves comparable performance to current state-of-the-art diffusion-based depth and normal estimation models, calling into question some of the conclusions drawn from prior works.
@article{martingarcia2024diffusione2eft,
title = {Fine-Tuning Image-Conditional Diffusion Models is Easier than You Think},
author = {Martin Garcia, Gonzalo and Abou Zeid, Karim and Schmidt, Christian and de Geus, Daan and Hermans, Alexander and Leibe, Bastian},
journal = {arXiv preprint arXiv:2409.11355},
year = {2024}
}
Interactive4D: Interactive 4D LiDAR Segmentation
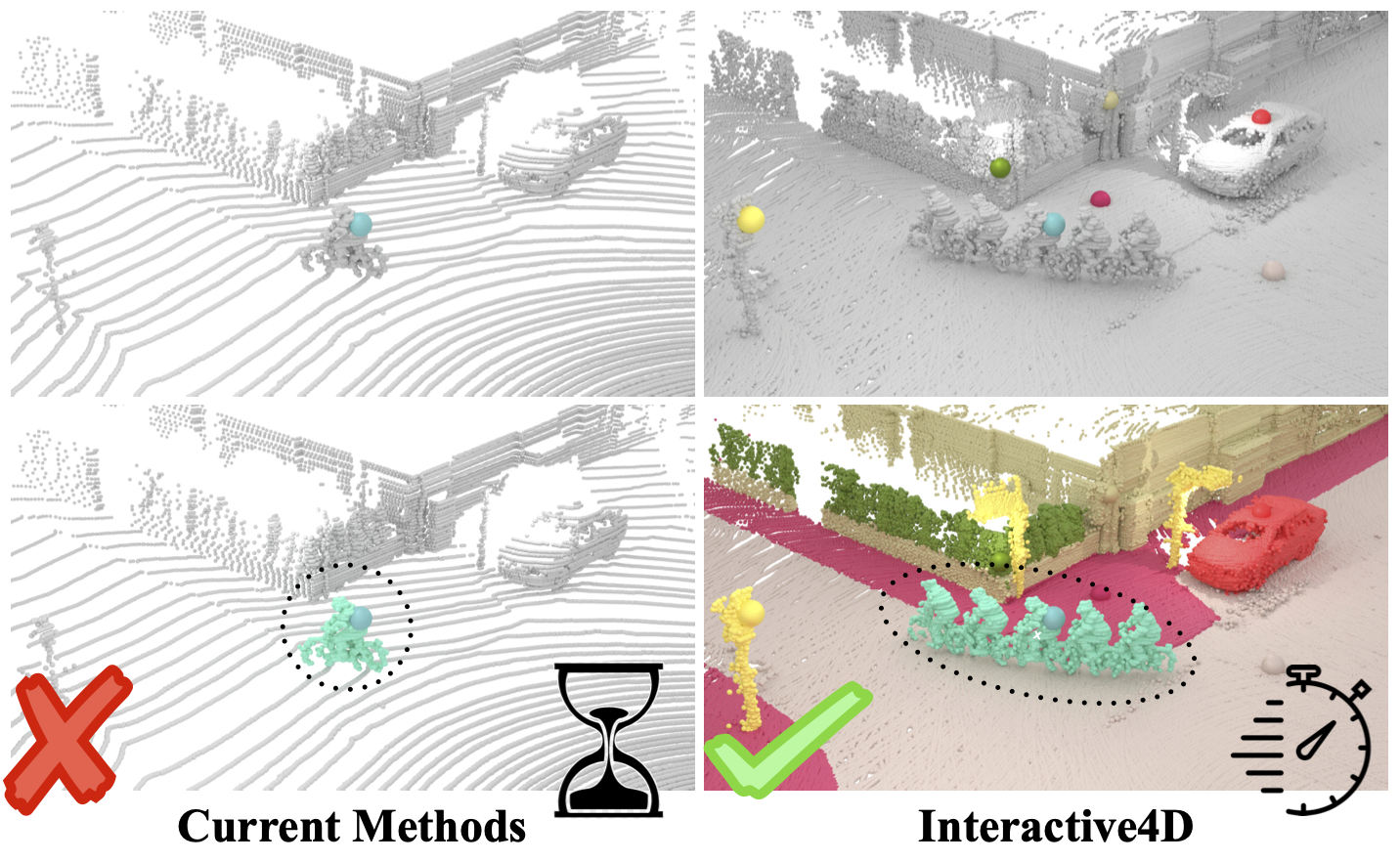
Interactive segmentation has an important role in facilitating the annotation process of future LiDAR datasets. Existing approaches sequentially segment individual objects at each LiDAR scan, repeating the process throughout the entire sequence, which is redundant and ineffective. In this work, we propose interactive 4D segmentation, a new paradigm that allows segmenting multiple objects on multiple LiDAR scans simultaneously, and Interactive4D, the first interactive 4D segmentation model that segments multiple objects on superimposed consecutive LiDAR scans in a single iteration by utilizing the sequential nature of LiDAR data. While performing interactive segmentation, our model leverages the entire space-time volume, leading to more efficient segmentation. Operating on the 4D volume, it directly provides consistent instance IDs over time and also simplifies tracking annotations. Moreover, we show that click simulations are crucial for successful model training on LiDAR point clouds. To this end, we design a click simulation strategy that is better suited for the characteristics of LiDAR data. To demonstrate its accuracy and effectiveness, we evaluate Interactive4D on multiple LiDAR datasets, where Interactive4D achieves a new state-of-the-art by a large margin.
@article{fradlin2024interactive4d,
title = {{Interactive4D: Interactive 4D LiDAR Segmentation}},
author = {Fradlin, Ilya and Zulfikar, Idil Esen and Yilmaz, Kadir and Kontogianni, Thodora and Leibe, Bastian},
journal = {arXiv preprint arXiv:2410.08206},
year = {2024}
}
Multiphysics Simulation Methods in Computer Graphics
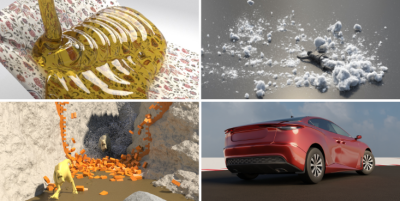
Physics simulation is a cornerstone of many computer graphics applications, ranging from video games and virtual reality to visual effects and computational design. The number of techniques for physically-based modeling and animation has thus skyrocketed over the past few decades, facilitating the simulation of a wide variety of materials and physical phenomena. This report captures the state-of-the-art of multiphysics simulation for computer graphics applications. Although a lot of work has focused on simulating individual phenomena, here we put an emphasis on methods developed by the computer graphics community for simulating various physical phenomena and materials, as well as the interactions between them. These include combinations of discretization schemes, mathematical modeling frameworks, and coupling techniques. For the most commonly used methods we provide an overview of the state-of-the-art and deliver valuable insights into the various approaches. A selection of software frameworks that offer out-of-the-box multiphysics modeling capabilities is also presented. Finally, we touch on emerging trends in physics-based animation that affect multiphysics simulation, including machine learning-based methods which have become increasingly popular in recent years.
A Smoothed Particle Hydrodynamics framework for fluid simulation in robotics
Simulation is a core component of robotics workflows that can shed light on the complex interplay between a physical body, the environment and sensory feedback mechanisms in silico. To this goal several simulation methods, originating in rigid body dynamics and in continuum mechanics have been employed, enabling the simulation of a plethora of phenomena such as rigid/soft body dynamics, fluid dynamics, muscle simulation as well as sensor and actuator dynamics. The physics engines commonly employed in robotics simulation focus on rigid body dynamics, whereas continuum mechanics methods excel on the simulation of phenomena where deformation plays a crucial role, keeping the two fields relatively separate. Here, we propose a shift of paradigm that allows for the accurate simulation of fluids in interaction with rigid bodies within the same robotics simulation framework, based on the continuum mechanics-based Smoothed Particle Hydrodynamics method. The proposed framework is useful for simulations such as swimming robots with complex geometries, robots manipulating fluids and even robots emitting highly viscous materials such as the ones used for 3D printing. Scenarios like swimming on the surface, air-water transitions, locomotion on granular media can be natively simulated within the proposed framework. Firstly, we present the overall architecture of our framework and give examples of a concrete software implementation. We then verify our approach by presenting one of the first of its kind simulation of self-propelled swimming robots with a smooth particle hydrodynamics method and compare our simulations with real experiments. Finally, we propose a new category of simulations that would benefit from this approach and discuss ways that the sim-to-real gap could be further reduced.
@article{AAB+24,
title = {A smoothed particle hydrodynamics framework for fluid simulation in robotics},
journal = {Robotics and Autonomous Systems},
volume = {185},
year = {2025},
issn = {0921-8890},
doi = {https://doi.org/10.1016/j.robot.2024.104885},
url = {https://www.sciencedirect.com/science/article/pii/S0921889024002690},
author = {Emmanouil Angelidis and Jonathan Arreguit and Jan Bender and Patrick Berggold and Ziyuan Liu and Alois Knoll and Alessandro Crespi and Auke J. Ijspeert}
}
Front Matter: The Third Workshop on Locomotion and Wayfinding in XR (LocXR)

The Third Workshop on Locomotion and Wayfinding in XR, held in conjunction with IEEE VR 2025 in Saint-Malo, France, is dedicated to advancing research and fostering discussions around the critical topics of navigation in extended reality (XR). Navigation is a fundamental form of user interaction in XR, yet it poses numerous challenges in conceptual design, technical implementation, and systematic evaluation. By bringing together researchers and practitioners, this workshop aims to address these challenges and push the boundaries of what is achievable in XR navigation.
@inproceedings{Weissker2025,
author={T. {Weissker} and D. {Zielasko}},
booktitle={2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
title={The Third Workshop on Locomotion and Wayfinding in XR (LocXR)},
year={2025},
volume={},
number={},
pages={239-240},
doi={10.1109/VRW66409.2025.00058}
}
PASCAL - A Collaboration Technique Between Non-Collocated Avatars in Large Collaborative Virtual Environments
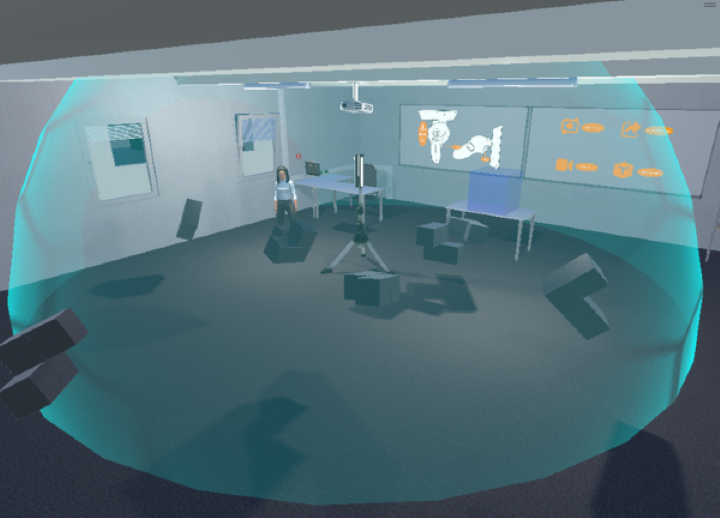
Collaborative work in large virtual environments often requires transitions from loosely-coupled collaboration at different locations to tightly-coupled collaboration at a common meeting point. Inspired by prior work on the continuum between these extremes, we present two novel interaction techniques designed to share spatial context while collaborating over large virtual distances. The first method replicates the familiar setup of a video conference by providing users with a virtual tablet to share video feeds with their peers. The second method called PASCAL (Parallel Avatars in a Shared Collaborative Aura Link) enables users to share their immediate spatial surroundings with others by creating synchronized copies of it at the remote locations of their collaborators. We evaluated both techniques in a within-subject user study, in which 24 participants were tasked with solving a puzzle in groups of two. Our results indicate that the additional contextual information provided by PASCAL had significantly positive effects on task completion time, ease of communication, mutual understanding, and co-presence. As a result, our insights contribute to the repertoire of successful interaction techniques to mediate between loosely- and tightly-coupled work in collaborative virtual environments.
@article{Gilbert2025,
author={D. {Gilbert} and A. {Bose} and T. {Kuhlen} and T. {Weissker}},
journal={IEEE Transactions on Visualization and Computer Graphics},
title={PASCAL - A Collaboration Technique Between Non-Collocated Avatars in Large Collaborative Virtual Environments},
year={2025},
volume={31},
number={5},
pages={1268-1278},
doi={10.1109/TVCG.2025.3549175}
}
Minimalism or Creative Chaos? On the Arrangement and Analysis of Numerous Scatterplots in Immersi-ve 3D Knowledge Spaces

Working with scatterplots is a classic everyday task for data analysts, which gets increasingly complex the more plots are required to form an understanding of the underlying data. To help analysts retrieve relevant plots more quickly when they are needed, immersive virtual environments (iVEs) provide them with the option to freely arrange scatterplots in the 3D space around them. In this paper, we investigate the impact of different virtual environments on the users' ability to quickly find and retrieve individual scatterplots from a larger collection. We tested three different scenarios, all having in common that users were able to position the plots freely in space according to their own needs, but each providing them with varying numbers of landmarks serving as visual cues - an Emptycene as a baseline condition, a single landmark condition with one prominent visual cue being a Desk, and a multiple landmarks condition being a virtual Office. Results from a between-subject investigation with 45 participants indicate that the time and effort users invest in arranging their plots within an iVE had a greater impact on memory performance than the design of the iVE itself. We report on the individual arrangement strategies that participants used to solve the task effectively and underline the importance of an active arrangement phase for supporting the spatial memorization of scatterplots in iVEs.
@article{Derksen2025,
author={M. {Derksen} and T. {Kuhlen} and M. {Botsch} and T. {Weissker}},
journal={IEEE Transactions on Visualization and Computer Graphics},
title={Minimalism or Creative Chaos? On the Arrangement and Analysis of Numerous Scatterplots in Immersive 3D Knowledge Spaces},
year={2025},
volume={31},
number={5},
pages={746-756},
doi={10.1109/TVCG.2025.3549546}
}
Systematic Evaluation of Different Projection Methods for Monocular 3D Human Pose Estimation on Heavily Distorted Fisheye Images
Authors: Stephanie Käs, Sven Peter, Henrik Thillmann, Anton Burenko, Timm Linder, David Adrian, and Dennis Mack, Bastian Leibe
In this work, we tackle the challenge of 3D human pose estimation in fisheye images, which is crucial for applications in robotics, human-robot interaction, and automotive perception. Fisheye cameras offer a wider field of view, but their distortions make pose estimation difficult. We systematically analyze how different camera models impact prediction accuracy and introduce a strategy to improve pose estimation across diverse viewing conditions.
A key contribution of our work is FISHnCHIPS, a novel dataset featuring 3D human skeleton annotations in fisheye images, including extreme close-ups, ground-mounted cameras, and wide-FOV human poses. To support future research, we will be publicly releasing this dataset.
More details coming soon — stay tuned for the final publication! Looking forward to sharing our findings at ICRA 2025!
Look Gauss, No Pose: Novel View Synthesis using Gaussian Splatting without Accurate Pose Initialization
3D Gaussian Splatting has recently emerged as a powerful tool for fast and accurate novel-view synthesis from a set of posed input images. However, like most novel-view synthesis approaches, it relies on accurate camera pose information, limiting its applicability in real-world scenarios where acquiring accurate camera poses can be challenging or even impossible. We propose an extension to the 3D Gaussian Splatting framework by optimizing the extrinsic camera parameters with respect to photometric residuals. We derive the analytical gradients and integrate their computation with the existing high-performance CUDA implementation. This enables downstream tasks such as 6-DoF camera pose estimation as well as joint reconstruction and camera refinement. In particular, we achieve rapid convergence and high accuracy for pose estimation on real-world scenes. Our method enables fast reconstruction of 3D scenes without requiring accurate pose information by jointly optimizing geometry and camera poses, while achieving state-of-the-art results in novel-view synthesis. Our approach is considerably faster to optimize than most com- peting methods, and several times faster in rendering. We show results on real-world scenes and complex trajectories through simulated environments, achieving state-of-the-art results on LLFF while reducing runtime by two to four times compared to the most efficient competing method. Source code will be available at https://github.com/Schmiddo/noposegs.
Point-VOS: Pointing Up Video Object Segmentation

Current state-of-the-art Video Object Segmentation (VOS) methods rely on dense per-object mask annotations both during training and testing. This requires time-consuming and costly video annotation mechanisms. We propose a novel Point-VOS task with a spatio-temporally sparse point-wise annotation scheme that substantially reduces the annotation effort. We apply our annotation scheme to two large-scale video datasets with text descriptions and annotate over 19M points across 133K objects in 32K videos. Based on our annotations, we propose a new Point-VOS benchmark, and a corresponding point-based training mechanism, which we use to establish strong baseline results. We show that existing VOS methods can easily be adapted to leverage our point annotations during training, and can achieve results close to the fully-supervised performance when trained on pseudo-masks generated from these points. In addition, we show that our data can be used to improve models that connect vision and language, by evaluating it on the Video Narrative Grounding (VNG) task. We will make our code and annotations available at https://pointvos.github.io.
ControlRoom3D: Room Generation using Semantic Proxies
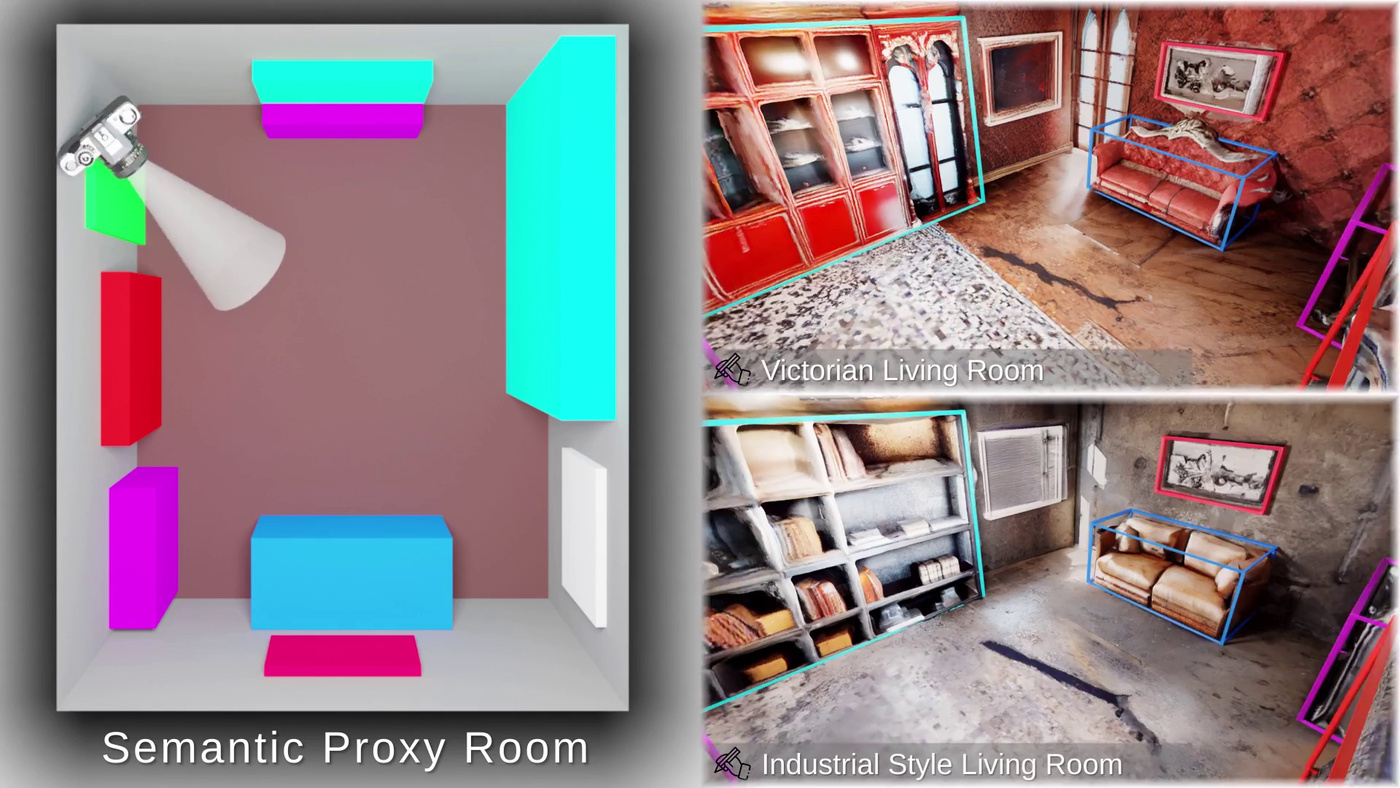
Manually creating 3D environments for AR/VR applications is a complex process requiring expert knowledge in 3D modeling software. Pioneering works facilitate this process by generating room meshes conditioned on textual style descriptions. Yet, many of these automatically generated 3D meshes do not adhere to typical room layouts, compromising their plausibility, e.g., by placing several beds in one bedroom. To address these challenges, we present ControlRoom3D, a novel method to generate high-quality room meshes. Central to our approach is a user-defined 3D semantic proxy room that outlines a rough room layout based on semantic bounding boxes and a textual description of the overall room style. Our key insight is that when rendered to 2D, this 3D representation provides valuable geometric and semantic information to control powerful 2D models to generate 3D consistent textures and geometry that aligns well with the proxy room. Backed up by an extensive study including quantitative metrics and qualitative user evaluations, our method generates diverse and globally plausible 3D room meshes, thus empowering users to design 3D rooms effortlessly without specialized knowledge.
@inproceedings{schult23controlroom3d,
author = {Schult, Jonas and Tsai, Sam and H\"ollein, Lukas and Wu, Bichen and Wang, Jialiang and Ma, Chih-Yao and Li, Kunpeng and Wang, Xiaofang and Wimbauer, Felix and He, Zijian and Zhang, Peizhao and Leibe, Bastian and Vajda, Peter and Hou, Ji},
title = {ControlRoom3D: Room Generation using Semantic Proxy Rooms},
booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2024},
}
STARK: A Unified Framework for Strongly Coupled Simulation of Rigid and Deformable Bodies with Frictional Contact

The use of simulation in robotics is increasingly widespread for the purpose of testing, synthetic data generation and skill learning. A relevant aspect of simulation for a variety of robot applications is physics-based simulation of robot-object interactions. This involves the challenge of accurately modeling and implementing different mechanical systems such as rigid and deformable bodies as well as their interactions via constraints, contact or friction. Most state-of-the-art physics engines commonly used in robotics either cannot couple deformable and rigid bodies in the same framework, lack important systems such as cloth or shells, have stability issues in complex friction-dominated setups or cannot robustly prevent penetrations. In this paper, we propose a framework for strongly coupled simulation of rigid and deformable bodies with focus on usability, stability, robustness and easy access to state-of-the-art deformation and frictional contact models. Our system uses the Finite Element Method (FEM) to model deformable solids, the Incremental Potential Contact (IPC) approach for frictional contact and a robust second order optimizer to ensure stable and penetration-free solutions to tight tolerances. It is a general purpose framework, not tied to a particular use case such as grasping or learning, it is written in C++ and comes with a Python interface. We demonstrate our system’s ability to reproduce complex real-world experiments where a mobile vacuum robot interacts with a towel on different floor types and towel geometries. Our system is able to reproduce 100% of the qualitative outcomes observed in the laboratory environment. The simulation pipeline, named Stark (the German word for strong, as in strong coupling) is made open-source.
@INPROCEEDINGS{FLL+24,
author={Fernández-Fernández, José Antonio and Lange, Ralph and Laible, Stefan and Arras, Kai O. and Bender, Jan},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
title={STARK: A Unified Framework for Strongly Coupled Simulation of Rigid and Deformable Bodies with Frictional Contact},
year={2024}
}
Mask4Former: Mask Transformer for 4D Panoptic Segmentation
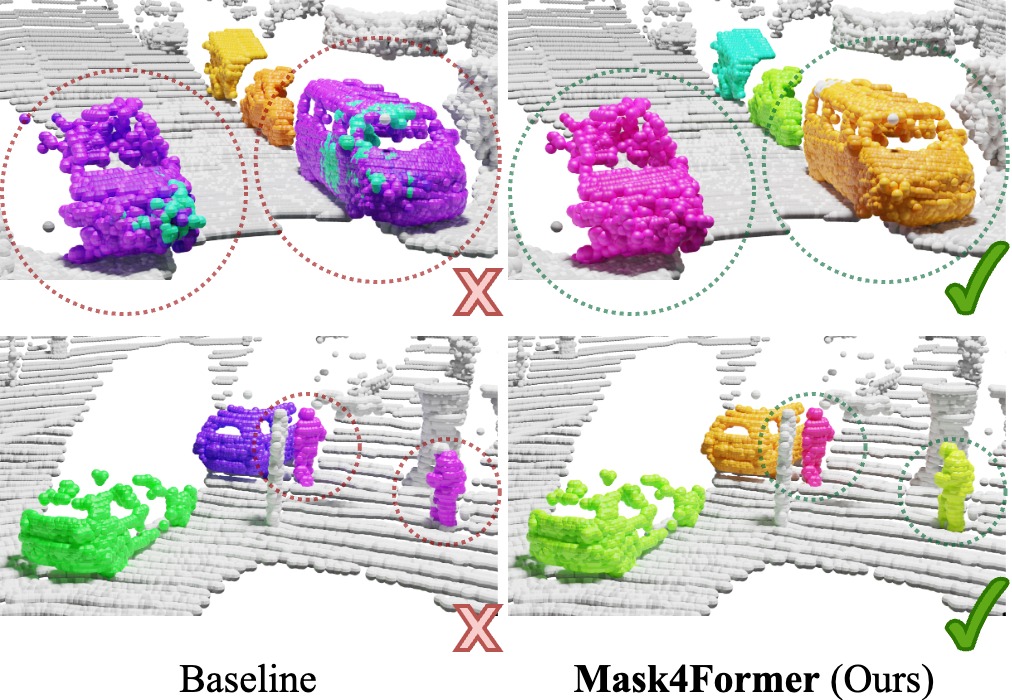
Accurately perceiving and tracking instances over time is essential for the decision-making processes of autonomous agents interacting safely in dynamic environments. With this intention, we propose Mask4Former for the challenging task of 4D panoptic segmentation of LiDAR point clouds.
Mask4Former is the first transformer-based approach unifying semantic instance segmentation and tracking of sparse and irregular sequences of 3D point clouds into a single joint model. Our model directly predicts semantic instances and their temporal associations without relying on hand-crafted non-learned association strategies such as probabilistic clustering or voting-based center prediction. Instead, Mask4Former introduces spatio-temporal instance queries that encode the semantic and geometric properties of each semantic tracklet in the sequence.
In an in-depth study, we find that promoting spatially compact instance predictions is critical as spatio-temporal instance queries tend to merge multiple semantically similar instances, even if they are spatially distant. To this end, we regress 6-DOF bounding box parameters from spatio-temporal instance queries, which are used as an auxiliary task to foster spatially compact predictions.
Mask4Former achieves a new state-of-the-art on the SemanticKITTI test set with a score of 68.4 LSTQ.
@inproceedings{yilmaz24mask4former,
title = {{Mask4Former: Mask Transformer for 4D Panoptic Segmentation}},
author = {Yilmaz, Kadir and Schult, Jonas and Nekrasov, Alexey and Leibe, Bastian},
booktitle = {International Conference on Robotics and Automation (ICRA)},
year = {2024}
}
Implicit frictional dynamics with soft constraints
Dynamics simulation with frictional contacts is important for a wide range of applications, from cloth simulation to object manipulation. Recent methods using smoothed lagged friction forces have enabled robust and differentiable simulation of elastodynamics with friction. However, the resulting frictional behavior can be inaccurate and may not converge to analytic solutions. Here we evaluate the accuracy of lagged friction models in comparison with implicit frictional contact systems. We show that major inaccuracies near the stick-slip threshold in such systems are caused by lagging of friction forces rather than by smoothing the Coulomb friction curve. Furthermore, we demonstrate how systems involving implicit or lagged friction can be correctly used with higher-order time integration and highlight limitations in earlier attempts. We demonstrate how to exploit forward-mode automatic differentiation to simplify and, in some cases, improve the performance of the inexact Newton method. Finally, we show that other complex phenomena can also be simulated effectively while maintaining smoothness of the entire system. We extend our method to exhibit stick-slip frictional behavior and preserve volume on compressible and nearly-incompressible media using soft constraints.
@ARTICLE{LLA*24,
author={Larionov, Egor and Longva, Andreas and Ascher, Uri M. and Bender, Jan and Pai, Dinesh K.},
title={Implicit frictional dynamics with soft constraints},
journal={IEEE Transactions on Visualization and Computer Graphics},
year={2024},
volume={},
number={},
pages={1-12},
doi={10.1109/TVCG.2024.3437417}
}
AGILE3D: Attention Guided Interactive Multi-object 3D Segmentation

During interactive segmentation, a model and a user work together to delineate objects of interest in a 3D point cloud. In an iterative process, the model assigns each data point to an object (or the background), while the user corrects errors in the resulting segmentation and feeds them back into the model. The current best practice formulates the problem as binary classification and segments objects one at a time. The model expects the user to provide positive clicks to indicate regions wrongly assigned to the background and negative clicks on regions wrongly assigned to the object. Sequentially visiting objects is wasteful since it disregards synergies between objects: a positive click for a given object can, by definition, serve as a negative click for nearby objects. Moreover, a direct competition between adjacent objects can speed up the identification of their common boundary. We introduce AGILE3D, an efficient, attention-based model that (1) supports simultaneous segmentation of multiple 3D objects, (2) yields more accurate segmentation masks with fewer user clicks, and (3) offers faster inference. Our core idea is to encode user clicks as spatial-temporal queries and enable explicit interactions between click queries as well as between them and the 3D scene through a click attention module. Every time new clicks are added, we only need to run a lightweight decoder that produces updated segmentation masks. In experiments with four different 3D point cloud datasets, AGILE3D sets a new state-of-the-art. Moreover, we also verify its practicality in real-world setups with real user studies.
@inproceedings{yue2023agile3d,
title = {{AGILE3D: Attention Guided Interactive Multi-object 3D Segmentation}},
author = {Yue, Yuanwen and Mahadevan, Sabarinath and Schult, Jonas and Engelmann, Francis and Leibe, Bastian and Schindler, Konrad and Kontogianni, Theodora},
booktitle = {International Conference on Learning Representations (ICLR)},
year = {2024}
}
Wayfinding in Immersive Virtual Environments as Social Activity Supported by Virtual Agents
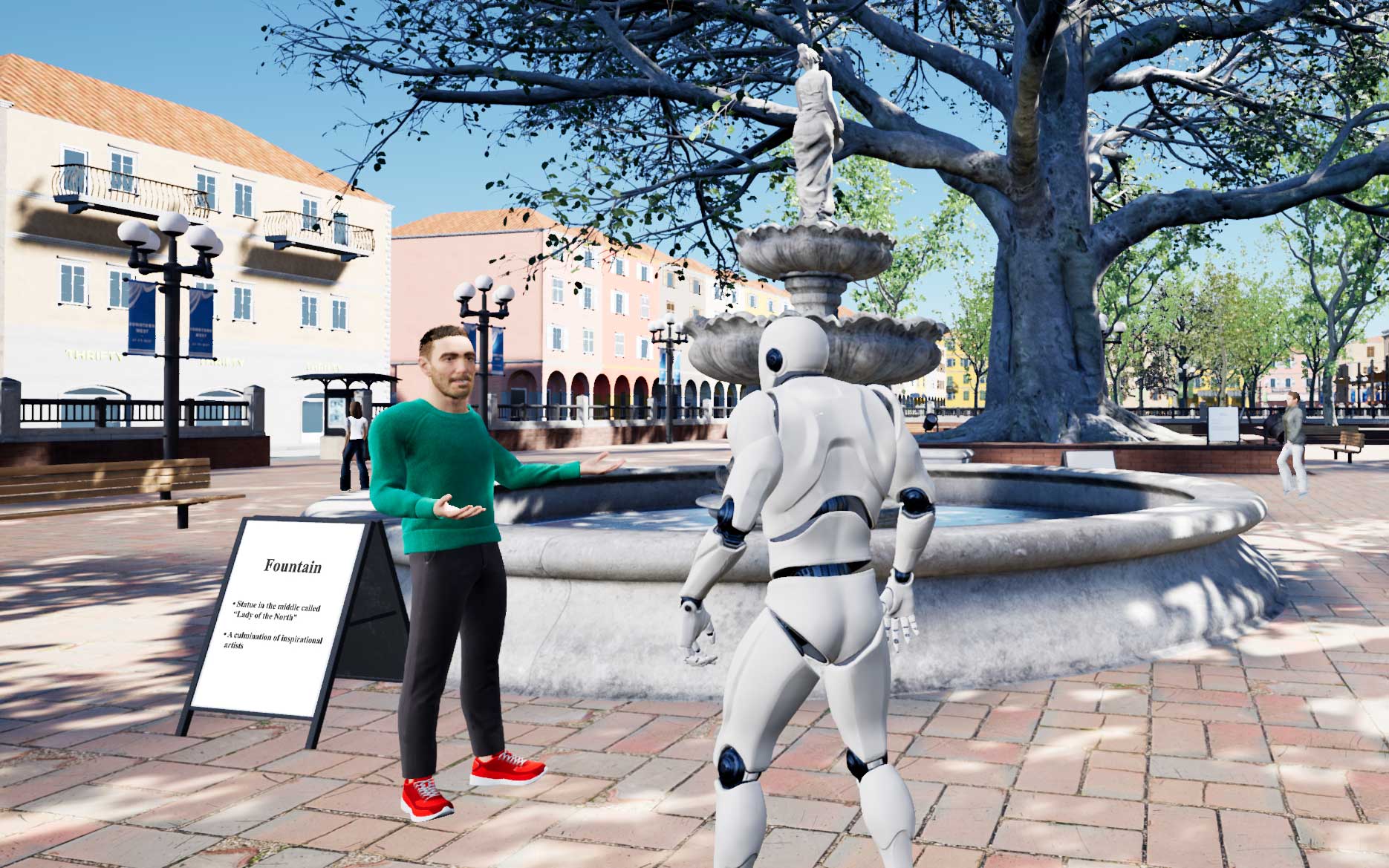
Effective navigation and interaction within immersive virtual environments rely on thorough scene exploration. Therefore, wayfinding is essential, assisting users in comprehending their surroundings, planning routes, and making informed decisions. Based on real-life observations, wayfinding is, thereby, not only a cognitive process but also a social activity profoundly influenced by the presence and behaviors of others. In virtual environments, these 'others' are virtual agents (VAs), defined as anthropomorphic computer-controlled characters, who enliven the environment and can serve as background characters or direct interaction partners. However, little research has been done to explore how to efficiently use VAs as social wayfinding support. In this paper, we aim to assess and contrast user experience, user comfort, and the acquisition of scene knowledge through a between-subjects study involving n = 60 participants across three distinct wayfinding conditions in one slightly populated urban environment: (i) unsupported wayfinding, (ii) strong social wayfinding using a virtual supporter who incorporates guiding and accompanying elements while directly impacting the participants' wayfinding decisions, and (iii) weak social wayfinding using flows of VAs that subtly influence the participants' wayfinding decisions by their locomotion behavior. Our work is the first to compare the impact of VAs' behavior in virtual reality on users' scene exploration, including spatial awareness, scene comprehension, and comfort. The results show the general utility of social wayfinding support, while underscoring the superiority of the strong type. Nevertheless, further exploration of weak social wayfinding as a promising technique is needed. Thus, our work contributes to the enhancement of VAs as advanced user interfaces, increasing user acceptance and usability.
@article{Boensch2024,
title={Wayfinding in Immersive Virtual Environments as Social Activity Supported by Virtual Agents},
author={B{\"o}nsch, Andrea and Ehret, Jonathan and Rupp, Daniel and Kuhlen, Torsten W.},
journal={Frontiers in Virtual Reality},
volume={4},
year={2024},
pages={1334795},
publisher={Frontiers},
doi={10.3389/frvir.2023.1334795}
}
Strongly Coupled Simulation of Magnetic Rigid Bodies

We present a strongly coupled method for the robust simulation of linear magnetic rigid bodies. Our approach describes the magnetic effects as part of an incremental potential function. This potential is inserted into the reformulation of the equations of motion for rigid bodies as an optimization problem. For handling collision and friction, we lean on the Incremental Potential Contact (IPC) method. Furthermore, we provide a novel, hybrid explicit / implicit time integration scheme for the magnetic potential based on a distance criterion. This reduces the fill-in of the energy Hessian in cases where the change in magnetic potential energy is small, leading to a simulation speedup without compromising the stability of the system. The resulting system yields a strongly coupled method for the robust simulation of magnetic effects. We showcase the robustness in theory by analyzing the behavior of the magnetic attraction against the contact resolution. Furthermore, we display stability in practice by simulating exceedingly strong and arbitrarily shaped magnets. The results are free of artifacts like bouncing for time step sizes larger than with the equivalent weakly coupled approach. Finally, we showcase the utility of our method in different scenarios with complex joints and numerous magnets.
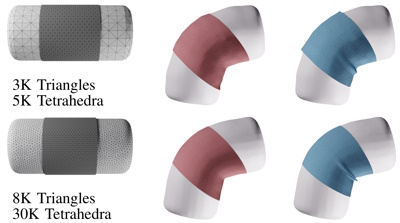
Curved Three-Director Cosserat Shells with Strong Coupling
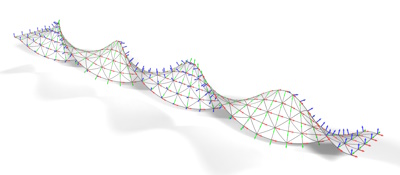
Continuum-based shell models are an established approach for the simulation of thin deformables in computer graphics. However, existing research in physically-based animation is mostly focused on shear-rigid Kirchhoff-Love shells. In this work we explore three-director Cosserat (micropolar) shells which introduce additional rotational degrees of freedom. This microrotation field models transverse shearing and in-plane drilling rotations. We propose an incremental potential formulation of the Cosserat shell dynamics which allows for strong coupling with frictional contact and other physical systems. We evaluate a corresponding finite element discretization for non-planar shells using second-order elements which alleviates shear-locking and permits simulation of curved geometries. Our formulation and the discretization, in particular of the rotational degrees of freedom, is designed to integrate well with typical simulation approaches in physically-based animation. While the discretization of the rotations requires some care, we demonstrate that they do not pose significant numerical challenges in Newton’s method. In our experiments we also show that the codimensional shell model is consistent with the respective three-dimensional model. We qualitatively compare our formulation with Kirchhoff-Love shells and demonstrate intriguing use cases for the additional modes of control over dynamic deformations offered by the Cosserat model such as directly prescribing rotations or angular velocities and influencing the shell’s curvature.
Exploring Uncertainty Visualization for Degenerate Tensors in 3D Symmetric Second-Order Tensor Field Ensembles
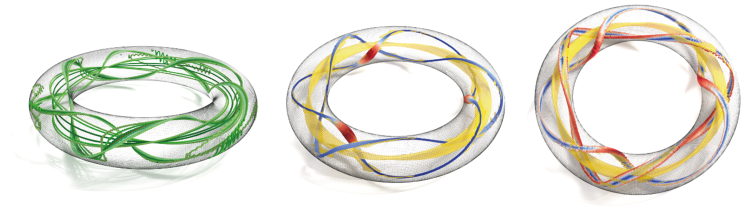
second-order tensors are fundamental in various scientific and engineering domains, as they can represent properties such as material stresses or diffusion processes in brain tissue. In recent years, several approaches have been introduced and improved to analyze these fields using topological features, such as degenerate tensor locations, i.e., the tensor has repeated eigenvalues, or normal surfaces. Traditionally, the identification of such features has been limited to single tensor fields. However, it has become common to create ensembles to account for uncertainties and variability in simulations and measurements. In this work, we explore novel methods for describing and visualizing degenerate tensor locations in 3D symmetric second-order tensor field ensembles. We base our considerations on the tensor mode and analyze its practicality in characterizing the uncertainty of degenerate tensor locations before proposing a variety of visualization strategies to effectively communicate degenerate tensor information. We demonstrate our techniques for synthetic and simulation data sets. The results indicate that the interplay of different descriptions for uncertainty can effectively convey information on degenerate tensor locations.
Best Paper Award!@INPROCEEDINGS{10771098,
author={Koenen, Jens and Petersen, Marvin and Garth, Christoph and Gerrits, Tim},
booktitle={2024 IEEE Visualization and Visual Analytics (VIS)},
title={DaVE - A Curated Database of Visualization Examples},
year={2024},
volume={},
number={},
pages={11-15},
keywords={Codes;Visual analytics;High performance computing;Data visualization;Containers;Visual databases;Visualization;Curated Database;High-Performance Computing},
doi={10.1109/VIS55277.2024.00010}
}
Choose Your Reference Frame Right: An Immersive Authoring Technique for Creating Reactive Behavior
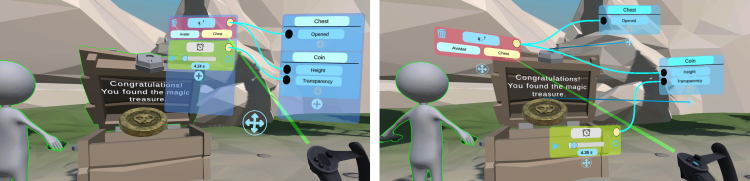
Immersive authoring enables content creation for virtual environments without a break of immersion. To enable immersive authoring of reactive behavior for a broad audience, we present modulation mapping, a simplified visual programming technique. To evaluate the applicability of our technique, we investigate the role of reference frames in which the programming elements are positioned, as this can affect the user experience. Thus, we developed two interface layouts: "surround-referenced" and "object-referenced". The former positions the programming elements relative to the physical tracking space, and the latter relative to the virtual scene objects. We compared the layouts in an empirical user study (n = 34) and found the surround-referenced layout faster, lower in task load, less cluttered, easier to learn and use, and preferred by users. Qualitative feedback, however, revealed the object-referenced layout as more intuitive, engaging, and valuable for visual debugging. Based on the results, we propose initial design implications for immersive authoring of reactive behavior by visual programming. Overall, modulation mapping was found to be an effective means for creating reactive behavior by the participants.
Honorable Mention for Best Paper!@inproceedings{eroglu2024choose,
title={Choose Your Reference Frame Right: An Immersive Authoring Technique for Creating Reactive Behavior},
author={Eroglu, Sevinc and Schmitz, Patric and Sinke, Kilian and Anders, David and Kuhlen, Torsten Wolfgang and Weyers, Benjamin},
booktitle={30th ACM Symposium on Virtual Reality Software and Technology},
pages={1--11},
year={2024}
}
InsitUE - Enabling Hybrid In-situ Visualizations through Unreal Engine and Catalyst
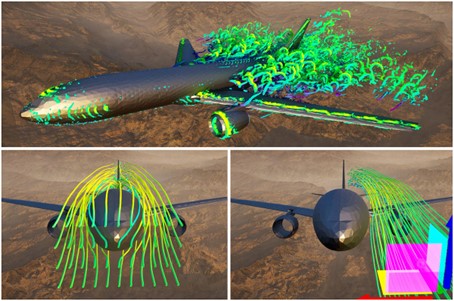
In-situ, in-transit, and hybrid approaches have become well-established visualization methods over the last decades. Especially for large simulations, these paradigms enable visualization and additionally allow for early insights. While there has been a lot of research on combining these approaches with classical visualization software, only a few worked on combining in-situ/in-transit approaches with modern game engines. In this paper, we present and demonstrate InsitUE, a Catalyst2 compatible hybrid workflow that enables interactive real-time visualization of simulation results using Unreal Engine.
@InProceedings{10.1007/978-3-031-73716-9_33,
author="Kr{\"u}ger, Marcel
and Milke, Jan Frieder
and Kuhlen, Torsten W.
and Gerrits, Tim",
editor="Weiland, Mich{\`e}le
and Neuwirth, Sarah
and Kruse, Carola
and Weinzierl, Tobias",
title="InsitUE - Enabling Hybrid In-situ Visualizations Through Unreal Engine and Catalyst",
booktitle="High Performance Computing. ISC High Performance 2024 International Workshops",
year="2025",
publisher="Springer Nature Switzerland",
address="Cham",
pages="469--481",
abstract="In-situ, in-transit, and hybrid approaches have become well-established visualization methods over the last decades. Especially for large simulations, these paradigms enable visualization and additionally allow for early insights. While there has been a lot of research on combining these approaches with classical visualization software, only a few worked on combining in-situ/in-transit approaches with modern game engines. In this paper, we present and demonstrate InsitUE, a Catalyst2 compatible hybrid workflow that enables interactive real-time visualization of simulation results using Unreal Engine.",
isbn="978-3-031-73716-9"
}
DaVE - A Curated Database of Visualization Examples
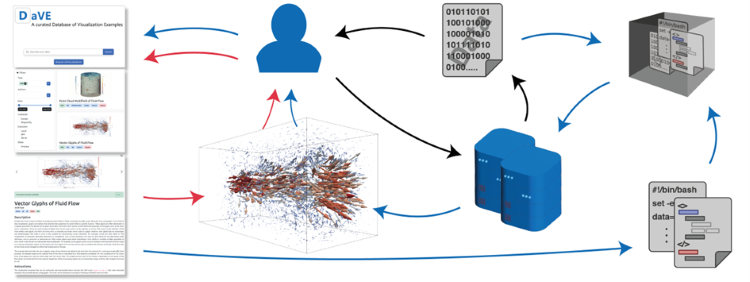
Visualization, from simple line plots to complex high-dimensional visual analysis systems, has established itself throughout numerous domains to explore, analyze, and evaluate data. Applying such visualizations in the context of simulation science where High-Performance Computing (HPC) produces ever-growing amounts of data that is more complex, potentially multidimensional, and multimodal, takes up resources and a high level of technological experience often not available to domain experts. In this work, we present DaVE -- a curated database of visualization examples, which aims to provide state-of-the-art and advanced visualization methods that arise in the context of HPC applications. Based on domain- or data-specific descriptors entered by the user, DaVE provides a list of appropriate visualization techniques, each accompanied by descriptions, examples, references, and resources. Sample code, adaptable container templates, and recipes for easy integration in HPC applications can be downloaded for easy access to high-fidelity visualizations. While the database is currently filled with a limited number of entries based on a broad evaluation of needs and challenges of current HPC users, DaVE is designed to be easily extended by experts from both the visualization and HPC communities.
Region-based Visualization in Hierarchically Clustered Ensemble Volumes
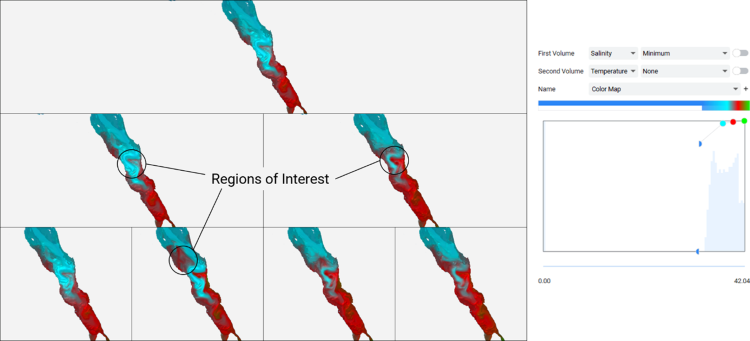
Ensembles of simulations are generated to capture uncertainties in the simulation model and its initialization. When simulating 3D spatial phenomena, the value distributions may vary from region to region. Therefore, visualization methods need to adapt to different types and shapes of statistical distributions across regions. In the case of normal distribution, a region is well represented and visualized by the means and standard deviations. In the case of multi-modal distributions, the ensemble can be subdivided to investigate whether sub-ensembles exhibit uni-modal distributions in that region. We, therefore, propose an interactive visual analysis approach for region-based visualization within a hierarchy of sub-ensembles. The hierarchy of sub-ensembles is created using hierarchical clustering, while regions can be defined using parallel coordinates of statistical properties. The identified regions are rendered in a hierarchy of interactive volume renderers. We apply our approach to two real-world simulation ensembles to show its usability.
@inproceedings{10.2312:vmv.20241206,
booktitle = {Vision, Modeling, and Visualization},
editor = {Linsen, Lars and Thies, Justus},
title = {{Region-based Visualization in Hierarchically Clustered Ensemble Volumes}},
author = {Rave, Hennes and Evers, Marina and Gerrits, Tim and Linsen, Lars},
year = {2024},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-247-9},
DOI = {10.2312/vmv.20241206}
}
Virtual Reality as a Tool for Monitoring Additive Manufacturing Processes via Digital Shadows

We present a data acquisition and visualization pipeline that allows experts to monitor additive manufacturing processes, in particular laser metal deposition with wire (LMD-w) processes, in immersive virtual reality. Our virtual environment consists of a digital shadow of the LMD-w production site enriched with additional measurement data shown on both static as well as handheld virtual displays. Users can explore the production site by enhanced teleportation capabilities that enable them to change their scale as well as their elevation above the ground plane. In an exploratory user study with 22 participants, we demonstrate that our system is generally suitable for the supervision of LMD-w processes while generating low task load and cybersickness. Therefore, it serves as a first promising step towards the successful application of virtual reality technology in the comparatively young field of additive manufacturing.
Semi-Automated Guided Teleportation through Immersive Virtual Environments

Immersive knowledge spaces like museums or cultural sites are often explored by traversing pre-defined paths that are curated to unfold a specific educational narrative. To support this type of guided exploration in VR, we present a semi-automated, handsfree path traversal technique based on teleportation that features a slow-paced interaction workflow targeted at fostering knowledge acquisition and maintaining spatial awareness. In an empirical user study with 34 participants, we evaluated two variations of our technique, differing in the presence or absence of intermediate teleportation points between the main points of interest along the route. While visiting additional intermediate points was objectively less efficient, our results indicate significant benefits of this approach regarding the user’s spatial awareness and perception of interface dependability. However, the user’s perception of flow, presence, attractiveness, perspicuity, and stimulation did not differ significantly. The overall positive reception of our approach encourages further research into semi-automated locomotion based on teleportation and provides initial insights into the design space of successful techniques in this domain.
A Lecturer’s Voice Quality and its Effect on Memory, Listening Effort, and Perception in a VR Environment

Many lecturers develop voice problems, such as hoarseness. Nevertheless, research on how voice quality influences listeners’ perception, comprehension, and retention of spoken language is limited to a small number of audio-only experiments. We aimed to address this gap by using audio-visual virtual reality (VR) to investigate the impact of a lecturer’s hoarseness on university students’ heard text recall, listening effort, and listening impression. Fifty participants were immersed in a virtual seminar room, where they engaged in a Dual-Task Paradigm. They listened to narratives presented by a virtual female professor, who spoke in either a typical or hoarse voice. Simultaneously, participants performed a secondary task. Results revealed significantly prolonged secondary-task response times with the hoarse voice compared to the typical voice, indicating increased listening effort. Subjectively, participants rated the hoarse voice as more annoying, effortful to listen to, and impeding for their cognitive performance. No effect of voice quality was found on heard text recall, suggesting that, while hoarseness may compromise certain aspects of spoken language processing, this might not necessarily result in reduced information retention. In summary, our findings underscore the importance of promoting vocal health among lecturers, which may contribute to enhanced listening conditions in learning spaces.
@article{Schiller2024,
author = {Isabel S. Schiller and Carolin Breuer and Lukas Aspöck and
Jonathan Ehret and Andrea Bönsch and Torsten W. Kuhlen and Janina Fels and
Sabine J. Schlittmeier},
doi = {10.1038/s41598-024-63097-6},
issn = {2045-2322},
issue = {1},
journal = {Scientific Reports},
keywords = {Audio-visual language processing,Virtual reality,Voice
quality},
month = {5},
pages = {12407},
pmid = {38811832},
title = {A lecturer’s voice quality and its effect on memory, listening
effort, and perception in a VR environment},
volume = {14},
url = {https://www.nature.com/articles/s41598-024-63097-6},
year = {2024},
}
IntenSelect+: Enhancing Score-Based Selection in Virtual Reality
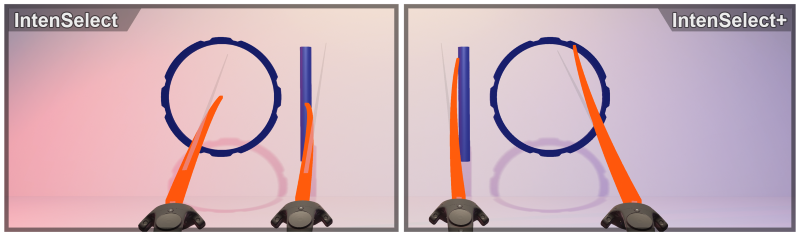
Object selection in virtual environments is one of the most common and recurring interaction tasks. Therefore, the used technique can critically influence a system’s overall efficiency and usability. IntenSelect is a scoring-based selection-by-volume technique that was shown to offer improved selection performance over conventional raycasting in virtual reality. This initial method, however, is most pronounced for small spherical objects that converge to a point-like appearance only, is challenging to parameterize, and has inherent limitations in terms of flexibility. We present an enhanced version of IntenSelect called IntenSelect+ designed to overcome multiple shortcomings of the original IntenSelect approach. In an empirical within-subjects user study with 42 participants, we compared IntenSelect+ to IntenSelect and conventional raycasting on various complex object configurations motivated by prior work. In addition to replicating the previously shown benefits of IntenSelect over raycasting, our results demonstrate significant advantages of IntenSelect+ over IntenSelect regarding selection performance, task load, and user experience. We, therefore, conclude that IntenSelect+ is a promising enhancement of the original approach that enables faster, more precise, and more comfortable object selection in immersive virtual environments.
@ARTICLE{10459000,
author={Krüger, Marcel and Gerrits, Tim and Römer, Timon and Kuhlen, Torsten and Weissker, Tim},
journal={IEEE Transactions on Visualization and Computer Graphics},
title={IntenSelect+: Enhancing Score-Based Selection in Virtual Reality},
year={2024},
volume={},
number={},
pages={1-10},
keywords={Visualization;Three-dimensional displays;Task analysis;Usability;Virtual environments;Shape;Engines;Virtual Reality;3D User Interfaces;3D Interaction;Selection;Score-Based Selection;Temporal Selection;IntenSelect},
Authentication in Immersive Virtual Environments through Gesture-Based Interaction with a Virtual Agent

Authentication poses a significant challenge in VR applications, as conventional methods, such as text input for usernames and passwords, prove cumbersome and unnatural in immersive virtual environments. Alternatives such as password managers or two-factor authentication may necessitate users to disengage from the virtual experience by removing their headsets. Consequently, we present an innovative system that utilizes virtual agents (VAs) as interaction partners, enabling users to authenticate naturally through a set of ten gestures, such as high fives, fist bumps, or waving. By combining these gestures, users can create personalized authentications akin to PINs, potentially enhancing security without compromising the immersive experience. To gain first insights into the suitability of this authentication process, we conducted a formal expert review with five participants and compared our system to a virtual keypad authentication approach. While our results show that the effectiveness of a VA-mediated gesture-based authentication system is still limited, they motivate further research in this area.
VRScenarioBuilder: Free-Hand Immersive Authoring Tool for Scenario-based Testing of Automated Vehicles
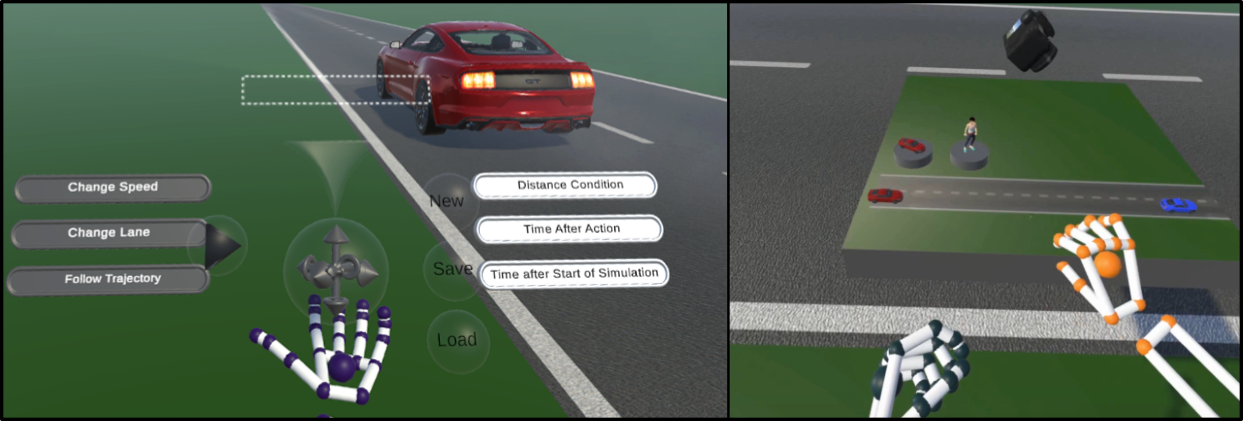
Virtual Reality has become an important medium in the automotive industry, providing engineers with a simulated platform to actively engage with and evaluate realistic driving scenarios for testing and validating automated vehicles. However, engineers are often restricted to using 2D desktop-based tools for designing driving scenarios, which can result in inefficiencies in the development and testing cycles. To this end, we present VRScenarioBuilder, an immersive authoring tool that enables engineers to create and modify dynamic driving scenarios directly in VR using free-hand interactions. Our tool features a natural user interface that enables users to create scenarios by using drag-and-drop building blocks. To evaluate the interface components and interactions, we conducted a user study with VR experts. Our findings highlight the effectiveness and potential improvements of our tool. We have further identified future research directions, such as exploring the spatial arrangement of the interface components and managing lengthy blocks.
Game Engines for Immersive Visualization: Using Unreal Engine Beyond Entertainment
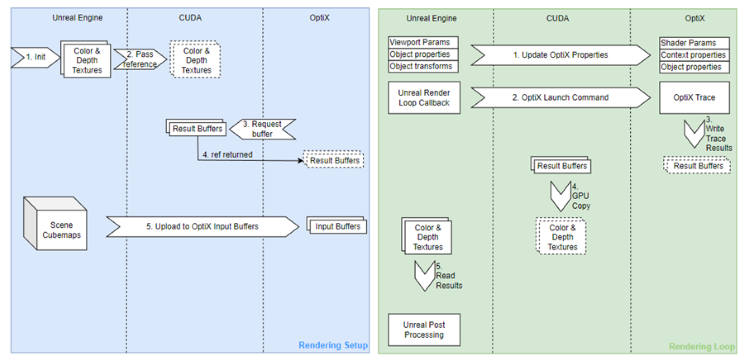
One core aspect of immersive visualization labs is to develop and provide powerful tools and applications that allow for efficient analysis and exploration of scientific data. As the requirements for such applications are often diverse and complex, the same applies to the development process. This has led to a myriad of different tools, frameworks, and approaches that grew and developed over time. The steady advance of commercial off-the-shelf game engines such as Unreal Engine has made them a valuable option for development in immersive visualization labs. In this work, we share our experience of migrating to Unreal Engine as a primary developing environment for immersive visualization applications. We share our considerations on requirements, present use cases developed in our lab to communicate advantages and challenges experienced, discuss implications on our research and development environments, and aim to provide guidance for others within our community facing similar challenges.
@article{10.1162/pres_a_00416,
author = {Krüger, Marcel and Gilbert, David and Kuhlen, Torsten W. and Gerrits, Tim},
title = "{Game Engines for Immersive Visualization: Using Unreal Engine Beyond Entertainment}",
journal = {PRESENCE: Virtual and Augmented Reality},
volume = {33},
pages = {31-55},
year = {2024},
month = {07},
abstract = "{One core aspect of immersive visualization labs is to develop and provide powerful tools and applications that allow for efficient analysis and exploration of scientific data. As the requirements for such applications are often diverse and complex, the same applies to the development process. This has led to a myriad of different tools, frameworks, and approaches that grew and developed over time. The steady advance of commercial off-the-shelf game engines such as Unreal Engine has made them a valuable option for development in immersive visualization labs. In this work, we share our experience of migrating to Unreal Engine as a primary developing environment for immersive visualization applications. We share our considerations on requirements, present use cases developed in our lab to communicate advantages and challenges experienced, discuss implications on our research and development environments, and aim to provide guidance for others within our community facing similar challenges.}",
issn = {1054-7460},
doi = {10.1162/pres_a_00416},
url = {https://doi.org/10.1162/pres\_a\_00416},
eprint = {https://direct.mit.edu/pvar/article-pdf/doi/10.1162/pres\_a\_00416/2465397/pres\_a\_00416.pdf},
}
Demo: Webcam-based Hand- and Object-Tracking for a Desktop Workspace in Virtual Reality
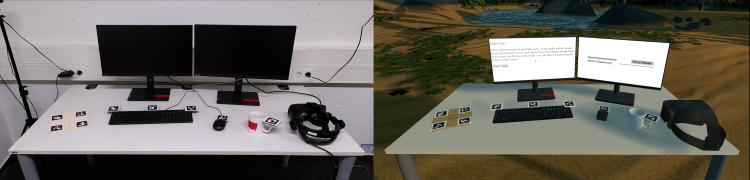
As virtual reality overlays the user’s view, challenges arise when interaction with their physical surroundings is still needed. In a seated workspace environment interaction with the physical surroundings can be essential to enable productive working. Interaction with e.g. physical mouse and keyboard can be difficult when no visual reference is given to where they are placed. This demo shows a combination of computer vision-based marker detection with machine-learning-based hand detection to bring users’ hands and arbitrary objects into VR.
@inproceedings{10.1145/3677386.3688879,
author = {Pape, Sebastian and Beierle, Jonathan Heinrich and Kuhlen, Torsten Wolfgang and Weissker, Tim},
title = {Webcam-based Hand- and Object-Tracking for a Desktop Workspace in Virtual Reality},
year = {2024},
isbn = {9798400710889},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3677386.3688879},
doi = {10.1145/3677386.3688879},
abstract = {As virtual reality overlays the user’s view, challenges arise when interaction with their physical surroundings is still needed. In a seated workspace environment interaction with the physical surroundings can be essential to enable productive working. Interaction with e.g. physical mouse and keyboard can be difficult when no visual reference is given to where they are placed. This demo shows a combination of computer vision-based marker detection with machine-learning-based hand detection to bring users’ hands and arbitrary objects into VR.},
booktitle = {Proceedings of the 2024 ACM Symposium on Spatial User Interaction},
articleno = {64},
numpages = {2},
keywords = {Hand-Tracking, Object-Tracking, Physical Props, Virtual Reality, Webcam},
location = {Trier, Germany},
series = {SUI '24}
Come Look at This: Supporting Fluent Transitions between Tightly and Loosely Coupled Collaboration in Social Virtual Reality
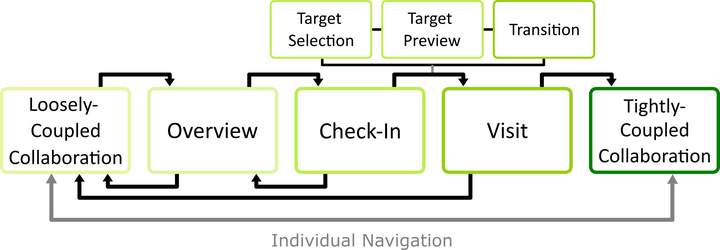
Collaborative work in social virtual reality often requires an interplay of loosely coupled collaboration from different virtual locations and tightly coupled face-to-face collaboration. Without appropriate system mediation, however, transitioning between these phases requires high navigation and coordination efforts. In this paper, we present an interaction system that allows collaborators in virtual reality to seamlessly switch between different collaboration models known from related work. To this end, we present collaborators with functionalities that let them work on individual sub-tasks in different virtual locations, consult each other using asymmetric interaction patterns while keeping their current location, and temporarily or permanently join each other for face-to-face interaction. We evaluated our methods in a user study with 32 participants working in teams of two. Our quantitative results indicate that delegating the target selection process for a long-distance teleport significantly improves placement accuracy and decreases task load within the team. Our qualitative user feedback shows that our system can be applied to support flexible collaboration. In addition, the proposed interaction sequence received positive evaluations from teams with varying VR experiences.
@ARTICLE{10568966,
author={Bimberg, Pauline and Zielasko, Daniel and Weyers, Benjamin and Froehlich, Bernd and Weissker, Tim},
journal={IEEE Transactions on Visualization and Computer Graphics},
title={Come Look at This: Supporting Fluent Transitions between Tightly and Loosely Coupled Collaboration in Social Virtual Reality},
year={2024},
volume={},
number={},
pages={1-17},
keywords={Collaboration;Virtual environments;Navigation;Task analysis;Virtual reality;Three-dimensional displays;Teleportation;Virtual Reality;3D User Interfaces;Multi-User Environments;Social VR;Groupwork;Collaborative Interfaces},
doi={10.1109/TVCG.2024.3418009}}
Poster: Travel Speed, Spatial Awareness, And Implications for Egocentric Target-Selection-Based Teleportation - A Replication Design
Virtual travel in Virtual Reality experiences is common, offering users the ability to explore expansive virtual spaces. Various interfaces exist for virtual travel, with speed playing a crucial role in user experience and spatial awareness. Teleportation-based interfaces provide instantaneous transitions, whereas continuous and semi-continuous methods vary in speed and control. Prior research by Bowman et al. highlighted the impact of travel speed on spatial awareness demonstrating that instantaneous travel can lead to user disorientation. However, additional cues, such as visual target selection, can aid in reorientation. This study replicates and extends Bowman’s experiment, investigating the influence of travel speed and visual target cues on spatial orientation.
On the Computation of User Placements for Virtual Formation Adjustments during Group Navigation

Several group navigation techniques enable a single navigator to control travel for all group members simultaneously in social virtual reality. A key aspect of this process is the ability to rearrange the group into a new formation to facilitate the joint observation of the scene or to avoid obstacles on the way. However, the question of how users should be distributed within the new formation to create an intuitive transition that minimizes disruptions of ongoing social activities is currently not explored. In this paper, we begin to close this gap by introducing four user placement strategies based on mathematical considerations, discussing their benefits and drawbacks, and sketching further novel ideas to approach this topic from different angles in future work. Our work, therefore, contributes to the overarching goal of making group interactions in social virtual reality more intuitive and comfortable for the involved users.
@INPROCEEDINGS{10536250,
author={Weissker, Tim and Franzgrote, Matthis and Kuhlen, Torsten and Gerrits, Tim},
booktitle={2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
title={On the Computation of User Placements for Virtual Formation Adjustments During Group Navigation},
year={2024},
volume={},
number={},
pages={396-402},
keywords={Three-dimensional displays;Navigation;Conferences;Virtual reality;Human factors;User interfaces;Task analysis;Human-centered computing—Human computer interaction (HCI)—Interaction paradigms—Virtual reality;Human-centered computing—Interaction design—Interaction design theory, concepts and paradigms},
doi={10.1109/VRW62533.2024.00077}}
Try This for Size: Multi-Scale Teleportation in Immersive Virtual Reality

The ability of a user to adjust their own scale while traveling through virtual environments enables them to inspect tiny features being ant-sized and to gain an overview of the surroundings as a giant. While prior work has almost exclusively focused on steering-based interfaces for multi-scale travel, we present three novel teleportation-based techniques that avoid continuous motion flow to reduce the risk of cybersickness. Our approaches build on the extension of known teleportation workflows and suggest specifying scale adjustments either simultaneously with, as a connected second step after, or separately from the user’s new horizontal position. The results of a two-part user study with 30 participants indicate that the simultaneous and connected specification paradigms are both suitable candidates for effective and comfortable multi-scale teleportation with nuanced individual benefits. Scale specification as a separate mode, on the other hand, was considered less beneficial. We compare our findings to prior research and publish the executable of our user study to facilitate replication and further analyses.
@ARTICLE{10458384,
author={Weissker, Tim and Franzgrote, Matthis and Kuhlen, Torsten},
journal={IEEE Transactions on Visualization and Computer Graphics},
title={Try This for Size: Multi-Scale Teleportation in Immersive Virtual Reality},
year={2024},
volume={30},
number={5},
pages={2298-2308},
keywords={Teleportation;Navigation;Virtual environments;Three-dimensional displays;Visualization;Cybersickness;Collaboration;Virtual Reality;3D User Interfaces;3D Navigation;Head-Mounted Display;Teleportation;Multi-Scale},
doi={10.1109/TVCG.2024.3372043}}
StudyFramework: Comfortably Setting up and Conducting Factorial-Design Studies Using the Unreal Engine
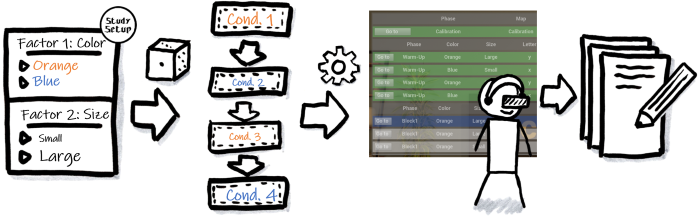
Setting up and conducting user studies is fundamental to virtual reality research. Yet, often these studies are developed from scratch, which is time-consuming and especially hard and error-prone for novice developers. In this paper, we introduce the StudyFramework, a framework specifically designed to streamline the setup and execution of factorial-design VR-based user studies within the Unreal Engine, significantly enhancing the overall process. We elucidate core concepts such as setup, randomization, the experimenter view, and logging. After utilizing our framework to set up and conduct their respective studies, 11 study developers provided valuable feedback through a structured questionnaire. This feedback, which was generally positive, highlighting its simplicity and usability, is discussed in detail.
@ InProceedings{Ehret2024a,
author={Ehret, Jonathan and Bönsch, Andrea and Fels, Janina and
Schlittmeier, Sabine J. and Kuhlen, Torsten W.},
booktitle={2024 IEEE Conference on Virtual Reality and 3D User Interfaces
Abstracts and Workshops (VRW): Workshop "Open Access Tools and Libraries for
Virtual Reality"},
title={StudyFramework: Comfortably Setting up and Conducting
Factorial-Design Studies Using the Unreal Engine},
year={2024}
}
Audiovisual Coherence: Is Embodiment of Background Noise Sources a Necessity?

Exploring the synergy between visual and acoustic cues in virtual reality (VR) is crucial for elevating user engagement and perceived (social) presence. We present a study exploring the necessity and design impact of background sound source visualizations to guide the design of future soundscapes. To this end, we immersed n = 27 participants using a head-mounted display (HMD) within a virtual seminar room with six virtual peers and a virtual female professor. Participants engaged in a dual-task paradigm involving simultaneously listening to the professor and performing a secondary vibrotactile task, followed by recalling the heard speech content. We compared three types of background sound source visualizations in a within-subject design: no visualization, static visualization, and animated visualization. Participants’ subjective ratings indicate the importance of animated background sound source visualization for an optimal coherent audiovisual representation, particularly when embedding peer-emitted sounds. However, despite this subjective preference, audiovisual coherence did not affect participants’ performance in the dual-task paradigm measuring their listening effort.
@ InProceedings{Ehret2024b,
author={Ehret, Jonathan and Bönsch, Andrea and Schiller, Isabel S. and
Breuer, Carolin and Aspöck, Lukas and Fels, Janina and Schlittmeier, Sabine
J. and Kuhlen, Torsten W.},
booktitle={2024 IEEE Conference on Virtual Reality and 3D User Interfaces
Abstracts and Workshops (VRW): "Workshop on Virtual Humans and Crowds in
Immersive Environments (VHCIE)"},
title={Audiovisual Coherence: Is Embodiment of Background Noise Sources a
Necessity?},
year={2024}
}
Simulation of wire metal transfer in the cold metal transfer (CMT) variant of gas metal arc welding using the smoothed particle hydrodynamics (SPH) approach
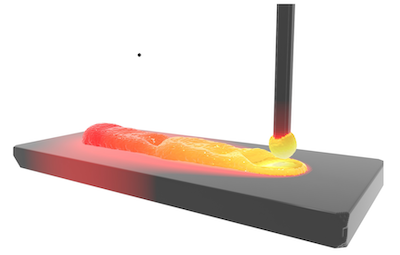
Cold metal transfer (CMT) is a variant of gas metal arc welding (GMAW) in which the molten metal of the wire is transferred to the weld pool mainly in the short-circuit phase. A special feature here is that the wire is retracted during this strongly controlled welding process. This allows precise and spatter-free formation of the weld seams with lower energy input. To simulate this process, a model based on the particle-based smoothed particle hydrodynamics (SPH) method is developed. This method provides a native solution for the mass and heat transfer. A simplified surrogate model was implemented as an arc heat source for welding simulation. This welding simulation model based on smoothed particle hydrodynamics method was augmented with surface effects, the Joule heating of the wire, and the effect of the electromagnetic forces. The model of metal transfer in the cold metal transfer process shows good qualitative agreement with real experiments.
@article{MWW+24,
author = {Mokrov, O. and Warkentin, S. and Westhofen, L. and Jeske, S. and Bender, J. and Sharma, R. and Reisgen, U.},
title = {Simulation of wire metal transfer in the cold metal transfer (CMT) variant of gas metal arc welding using the smoothed particle hydrodynamics (SPH) approach},
journal = {Materialwissenschaft und Werkstofftechnik},
volume = {55},
number = {1},
pages = {62-71},
keywords = {cold metal transfer (CMT), free surface deformation, gas metal arc welding (GMAW), simulation, smoothed particle hydrodynamics (SPH), geglätteter Partikel-basierter hydrodynamischer Ansatz (SPH), Kaltmetalltransfer (CMT), Metallschutzgasschweißens, Oberflächenverformung, Simulation},
doi = {https://doi.org/10.1002/mawe.202300166},
year = {2024}
}
Ray tracing method with implicit surface detection for smoothed particle hydrodynamics-based laser beam welding simulations
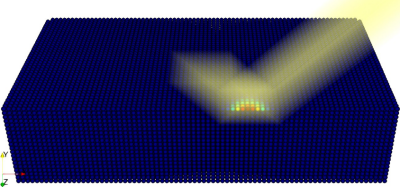
An important prerequisite for process simulations of laser beam welding is the accurate depiction of the surface energy distribution. This requires capturing the optical effects of the laser beam occurring at the free surface. In this work, a novel optics ray tracing scheme is proposed which can handle the reflection and absorption dynamics associated with laser beam welding. Showcasing the applicability of the approach, it is coupled with a novel surface detection algorithm based on smoothed particle hydrodynamics (SPH), which offers significant performance benefits over reconstruction-based methods. The results are compared to state-of-the-art experimental results in laser beam welding, for which an excellent correspondence in the case of the energy distributions inside capillaries is shown.
@article{WKB+24,
author = {Westhofen, L. and Kruska, J. and Bender, J. and Warkentin, S. and Mokrov, O. and Sharma, R. and Reisgen, U.},
title = {Ray tracing method with implicit surface detection for smoothed particle hydrodynamics-based laser beam welding simulations},
journal = {Materialwissenschaft und Werkstofftechnik},
volume = {55},
number = {1},
pages = {40-52},
keywords = {heat transfer, hydrodynamics, laser beam welding, ray optics, ray tracing, smoothed particle, geglättete Partikel, hydrodynamische, Laserstrahlschweißen, Strahloptik, Strahlverfolgung, Wärmetransfer},
doi = {https://doi.org/10.1002/mawe.202300161},
year = {2024}
}
German and Dutch Translations of the Artificial-Social-Agent Questionnaire Instrument for Evaluating Human-Agent Interactions
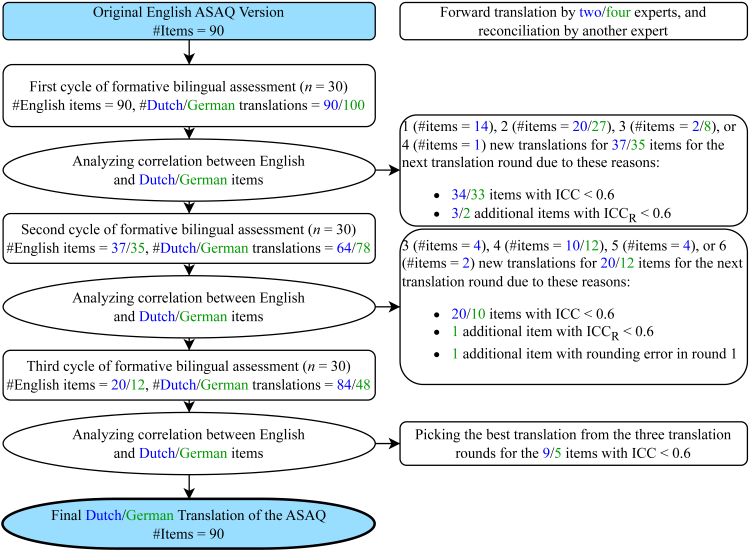
Enabling the widespread utilization of the Artificial-Social-Agent (ASA)Questionnaire, a research instrument to comprehensively assess diverse ASA qualities while ensuring comparability, necessitates translations beyond the original English source language questionnaire. We thus present Dutch and German translations of the long and short versions of the ASA Questionnaire and describe the translation challenges we encountered. Summative assessments with 240 English-Dutch and 240 English-German bilingual participants show, on average, excellent correlations (Dutch ICC M = 0.82,SD = 0.07, range [0.58, 0.93]; German ICC M = 0.81, SD = 0.09, range [0.58,0.94]) with the original long version on the construct and dimension level. Results for the short version show, on average, good correlations (Dutch ICC M = 0.65, SD = 0.12, range [0.39, 0.82]; German ICC M = 0.67, SD = 0.14, range [0.30,0.91]). We hope these validated translations allow the Dutch and German-speaking populations to evaluate ASAs in their own language.
@InProceedings{Boensch2024,
author = { Nele Albers, Andrea Bönsch, Jonathan Ehret, Boleslav
A. Khodakov, Willem-Paul Brinkman },
booktitle = {ACM International Conference on Intelligent Virtual
Agents (IVA ’24)},
title = { German and Dutch Translations of the
Artificial-Social-Agent Questionnaire Instrument for Evaluating Human-Agent
Interactions},
year = {2024},
organization = {ACM},
pages = {4},
doi = {10.1145/3652988.3673928},
}
Generalizing feature preservation in iso-surface extraction from triple dexel models
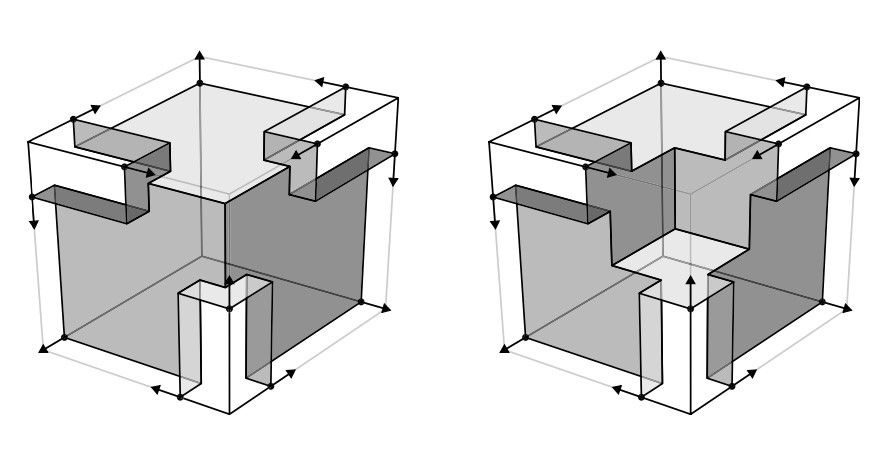
We present a method to resolve visual artifacts of a state-of-the-art iso-surface extraction algorithm by generating feature-preserving surface patches for isolated arbitrarily complex, single voxels without the need for further adaptive subdivision. In the literature, iso-surface extraction from a 3D voxel grid is limited to a single sharp feature per minimal unit, even for algorithms such as Cubical Marching Squares that produce feature-preserving surface reconstructions. In practice though, multiple sharp features can meet in a single voxel. This is reflected in the triple dexel model, which is used in simulation of CNC manufacturing processes. Our approach generalizes the use of normal information to perfectly preserve multiple sharp features for a single voxel, thus avoiding visual artifacts caused by state-of-the-art procedures.
RGB-D Cube R-CNN: 3D Object Detection with Selective Modality Dropout
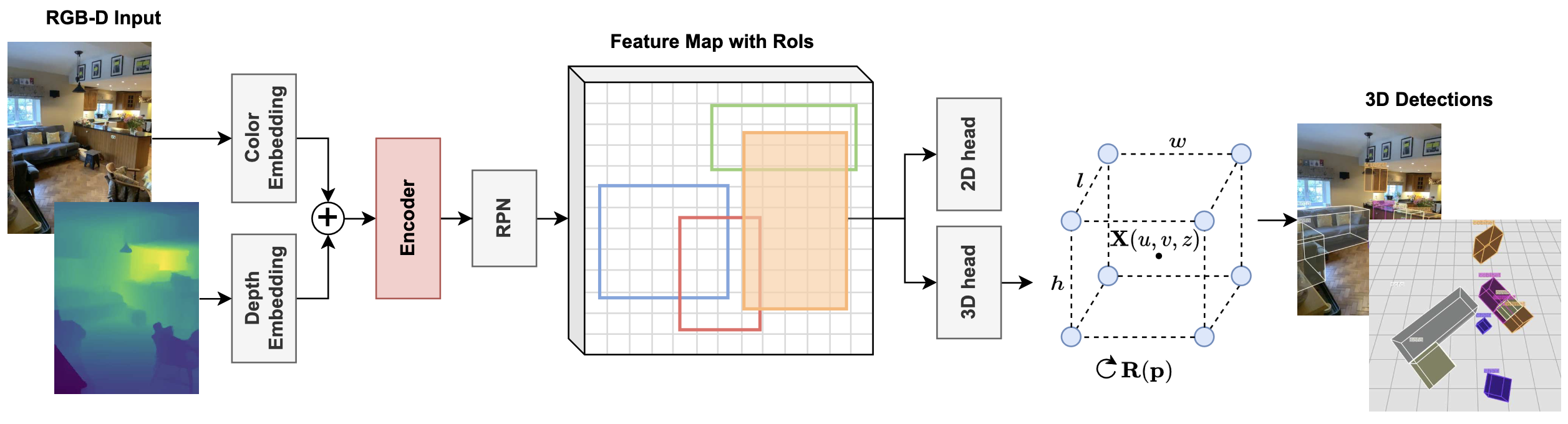
In this paper we create an RGB-D 3D object detector targeted at indoor robotics use cases where one modality may be unavailable due to a specific sensor setup or a sensor failure. We incorporate RGB and depth fusion into the recent Cube R-CNN framework with support for selective modality dropout. To train this model we augment the Omni3DIN dataset with depth information leading to a diverse dataset for 3D object detection in indoor scenes. In order to leverage strong pretrained networks we investigate the viability of Transformer-based backbones (Swin ViT) as an alternative to the currently popular CNN-based DLA backbone. We show that these Transformer-based image models work well based on our early-fusion approach and propose a modality dropout scheme to avoid the disregard of any modality during training facilitating selective modality dropout during inference. In extensive experiments our proposed RGB-D Cube R-CNN outperforms an RGB-only Cube R-CNN baseline by a significant margin on the task of indoor object detection. Additionally we observe a slight performance boost from the RGB-D training when inferring on only one modality which could for example be valuable in robotics applications with a reduced or unreliable sensor set.
@InProceedings{RGB_D_Cube_RCNN_2024_CVPRW,
author = {Piekenbrinck, Jens and Hermans, Alexander and Vaskevicius, Narunas and Linder, Timm and Leibe, Bastian},
title = {{RGB-D Cube R-CNN: 3D Object Detection with Selective Modality Dropout}},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops},
year = {2024},
}
Retargeting Visual Data with Deformation Fields
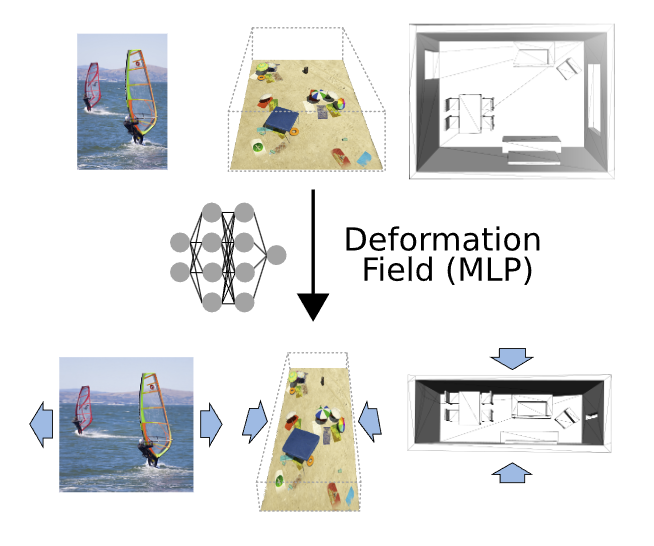
Seam carving is an image editing method that enables content- aware resizing, including operations like removing objects. However, the seam-finding strategy based on dynamic programming or graph-cut lim- its its applications to broader visual data formats and degrees of freedom for editing. Our observation is that describing the editing and retargeting of images more generally by a deformation field yields a generalisation of content-aware deformations. We propose to learn a deformation with a neural network that keeps the output plausible while trying to deform it only in places with low information content. This technique applies to different kinds of visual data, including images, 3D scenes given as neu- ral radiance fields, or even polygon meshes. Experiments conducted on different visual data show that our method achieves better content-aware retargeting compared to previous methods.
OoDIS: Anomaly Instance Segmentation Benchmark

Autonomous vehicles require a precise understanding of their environment to navigate safely. Reliable identification of unknown objects, especially those that are absent during training, such as wild animals, is critical due to their potential to cause serious accidents. Significant progress in semantic segmentation of anomalies has been driven by the availability of out-of-distribution (OOD) benchmarks. However, a comprehensive understanding of scene dynamics requires the segmentation of individual objects, and thus the segmentation of instances is essential. Development in this area has been lagging, largely due to the lack of dedicated benchmarks. To address this gap, we have extended the most commonly used anomaly segmentation benchmarks to include the instance segmentation task. Our evaluation of anomaly instance segmentation methods shows that this challenge remains an unsolved problem. The benchmark website and the competition page can be found at: https://vision.rwth-aachen.de/oodis
@inproceedings{nekrasov2023ugains,
title = {{UGainS: Uncertainty Guided Anomaly Instance Segmentation}},
author = {Nekrasov, Alexey and Hermans, Alexander and Kuhnert, Lars and Leibe, Bastian},
booktitle = {GCPR},
year = {2023}
}
Late-Breaking Report: VR-CrowdCraft: Coupling and Advancing Research in Pedestrian Dynamics and Social Virtual Reality
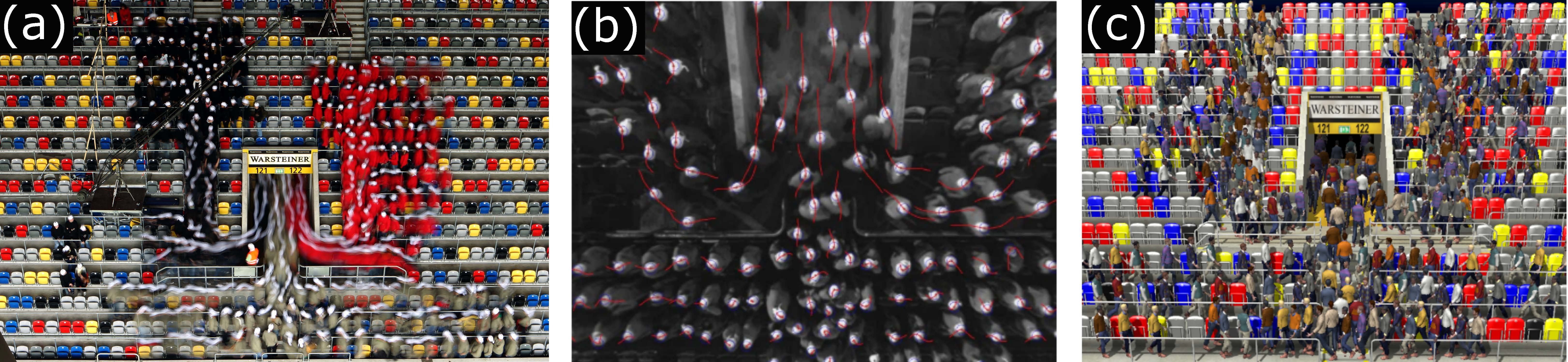
VR-CrowdCraft is a newly formed interdisciplinary initiative, dedicated to the convergence and advancement of two distinct yet interconnected research fields: pedestrian dynamics (PD) and social virtual reality (VR). The initiative aims to establish foundational workflows for a systematic integration of PD data obtained from real-life experiments, encompassing scenarios ranging from smaller clusters of approximately ten individuals to larger groups comprising several hundred pedestrians, into immersive virtual environments (IVEs), addressing the following two crucial goals: (1) Advancing pedestrian dynamic analysis and (2) Advancing virtual pedestrian behavior: authentic populated IVEs and new PD experiments. The LBR presentation will focus on goal 1.
DynaMITe: Dynamic Query Bootstrapping for Multi-object Interactive Segmentation Transformer
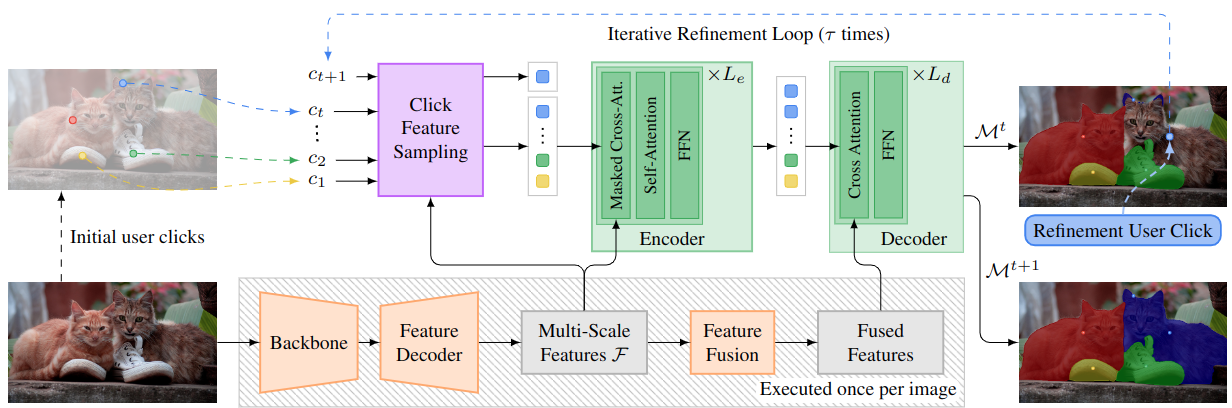
Most state-of-the-art instance segmentation methods rely on large amounts of pixel-precise ground-truth annotations for training, which are expensive to create. Interactive segmentation networks help generate such annotations based on an image and the corresponding user interactions such as clicks. Existing methods for this task can only process a single instance at a time and each user interaction requires a full forward pass through the entire deep network. We introduce a more efficient approach, called DynaMITe, in which we represent user interactions as spatio-temporal queries to a Transformer decoder with a potential to segment multiple object instances in a single iteration. Our architecture also alleviates any need to re-compute image features during refinement, and requires fewer interactions for segmenting multiple instances in a single image when compared to other methods. DynaMITe achieves state-of-the-art results on multiple existing interactive segmentation benchmarks, and also on the new multi-instance benchmark that we propose in this paper.
@article{RanaMahadevan23arxiv,
title={DynaMITe: Dynamic Query Bootstrapping for Multi-object Interactive Segmentation Transformer},
author={Rana, Amit and Mahadevan, Sabarinath and Alexander Hermans and Leibe, Bastian},
journal={arXiv preprint arXiv:2304.06668},
year={2023}
}
TarVis: A Unified Approach for Target-based Video Segmentation
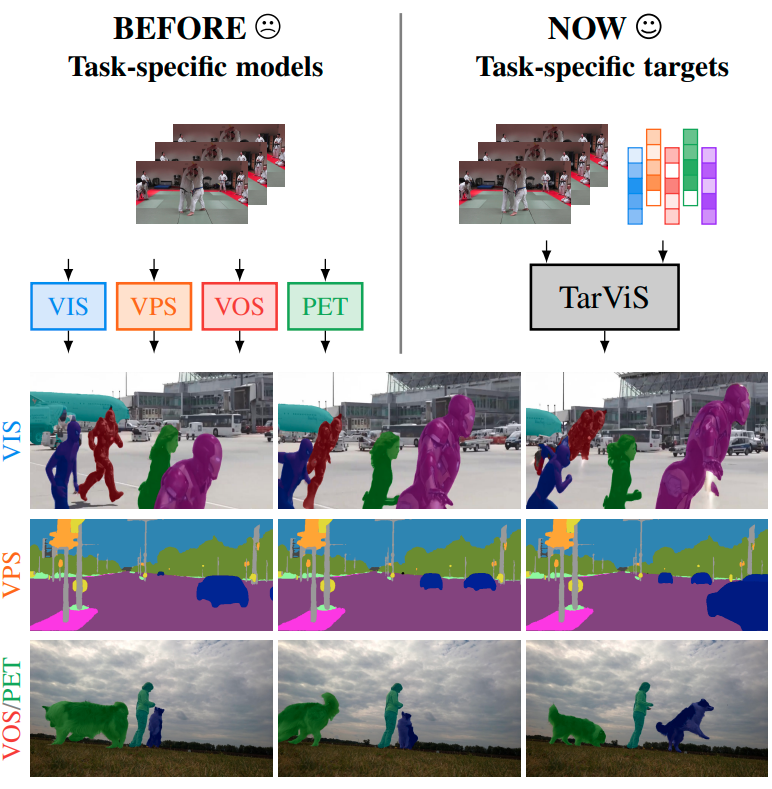
The general domain of video segmentation is currently fragmented into different tasks spanning multiple benchmarks. Despite rapid progress in the state-of-the-art, current methods are overwhelmingly task-specific and cannot conceptually generalize to other tasks. Inspired by recent approaches with multi-task capability, we propose TarViS: a novel, unified network architecture that can be applied to any task that requires segmenting a set of arbitrarily defined 'targets' in video. Our approach is flexible with respect to how tasks define these targets, since it models the latter as abstract 'queries' which are then used to predict pixel-precise target masks. A single TarViS model can be trained jointly on a collection of datasets spanning different tasks, and can hot-swap between tasks during inference without any task-specific retraining. To demonstrate its effectiveness, we apply TarViS to four different tasks, namely Video Instance Segmentation (VIS), Video Panoptic Segmentation (VPS), Video Object Segmentation (VOS) and Point Exemplar-guided Tracking (PET). Our unified, jointly trained model achieves state-of-the-art performance on 5/7 benchmarks spanning these four tasks, and competitive performance on the remaining two.
@inproceedings{athar2023tarvis,
title={TarViS: A Unified Architecture for Target-based Video Segmentation},
author={Athar, Ali and Hermans, Alexander and Luiten, Jonathon and Ramanan, Deva and Leibe, Bastian},
booktitle={CVPR},
year={2023}
}
3D Segmentation of Humans in Point Clouds with Synthetic Data
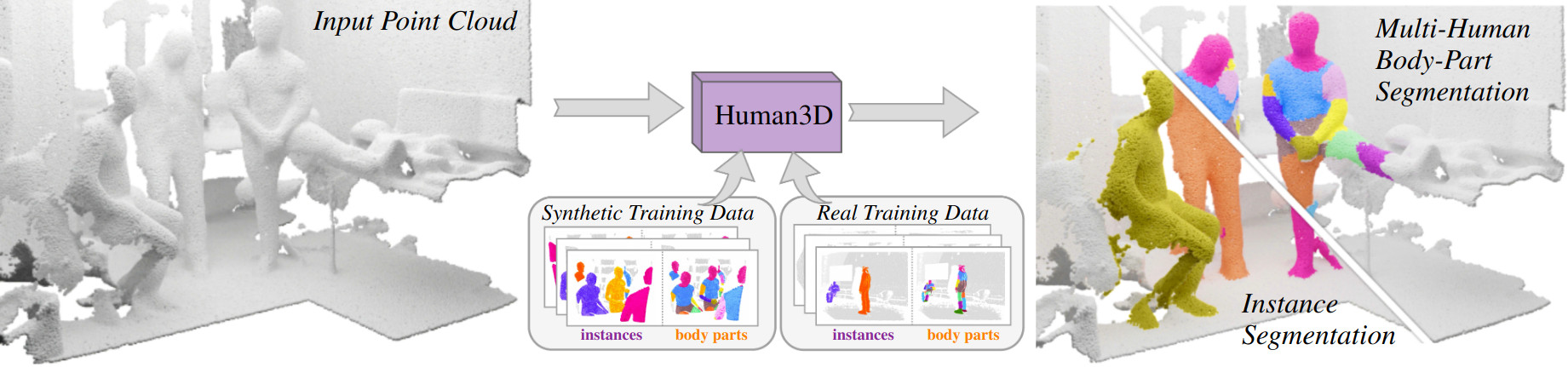
Segmenting humans in 3D indoor scenes has become increasingly important with the rise of human-centered robotics and AR/VR applications. In this direction, we explore the tasks of 3D human semantic-, instance- and multi-human body-part segmentation. Few works have attempted to directly segment humans in point clouds (or depth maps), which is largely due to the lack of training data on humans interacting with 3D scenes. We address this challenge and propose a framework for synthesizing virtual humans in realistic 3D scenes. Synthetic point cloud data is attractive since the domain gap between real and synthetic depth is small compared to images. Our analysis of different training schemes using a combination of synthetic and realistic data shows that synthetic data for pre-training improves performance in a wide variety of segmentation tasks and models. We further propose the first end-to-end model for 3D multi-human body-part segmentation, called Human3D, that performs all the above segmentation tasks in a unified manner. Remarkably, Human3D even outperforms previous task-specific state-of-the-art methods. Finally, we manually annotate humans in test scenes from EgoBody to compare the proposed training schemes and segmentation models.
@article{Takmaz23,
title = {{3D Segmentation of Humans in Point Clouds with Synthetic Data}},
author = {Takmaz, Ay\c{c}a and Schult, Jonas and Kaftan, Irem and Ak\c{c}ay, Mertcan
and Leibe, Bastian and Sumner, Robert and Engelmann, Francis and Tang, Siyu},
booktitle = {{International Conference on Computer Vision (ICCV)}},
year = {2023}
}
Implicit Surface Tension for SPH Fluid Simulation

The numerical simulation of surface tension is an active area of research in many different fields of application and has been attempted using a wide range of methods. Our contribution is the derivation and implementation of an implicit cohesion force based approach for the simulation of surface tension effects using the Smoothed Particle Hydrodynamics (SPH) method. We define a continuous formulation inspired by the properties of surface tension at the molecular scale which is spatially discretized using SPH. An adapted variant of the linearized backward Euler method is used for time discretization, which we also strongly couple with an implicit viscosity model. Finally, we extend our formulation with adhesion forces for interfaces with rigid objects.
Existing SPH approaches for surface tension in computer graphics are mostly based on explicit time integration, thereby lacking in stability for challenging settings. We compare our implicit surface tension method to these approaches and further evaluate our model on a wider variety of complex scenarios, showcasing its efficacy and versatility. Among others, these include but are not limited to simulations of a water crown, a dripping faucet and a droplet-toy.
@article{Jeske2023,
title = {Implicit {{Surface Tension}} for {{SPH Fluid Simulation}}},
author = {Jeske, Stefan Rhys and Westhofen, Lukas and L{\"o}schner, Fabian and {Fern{\'a}ndez-Fern{\'a}ndez}, Jos{\'e} Antonio and Bender, Jan},
year = {2023},
month = nov,
journal = {ACM Transactions on Graphics},
issn = {0730-0301},
doi = {10.1145/3631936},
urldate = {2023-11-07},
keywords = {adhesion,cohesion,fluid simulation,smoothed particle hydrodynamics,surface tension},
}
BURST: A Benchmark for Unifying Object Recognition, Segmentation and Tracking in Video
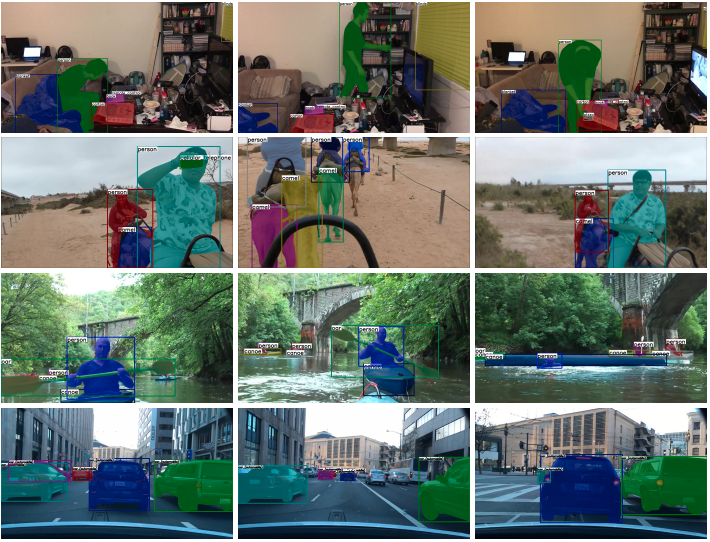
Multiple existing benchmarks involve tracking and segmenting objects in video e.g., Video Object Segmentation (VOS) and Multi-Object Tracking and Segmentation (MOTS), but there is little interaction between them due to the use of disparate benchmark datasets and metrics (e.g. J&F, mAP, sMOTSA). As a result, published works usually target a particular benchmark, and are not easily comparable to each another. We believe that the development of generalized methods that can tackle multiple tasks requires greater cohesion among these research sub-communities. In this paper, we aim to facilitate this by proposing BURST, a dataset which contains thousands of diverse videos with high-quality object masks, and an associated benchmark with six tasks involving object tracking and segmentation in video. All tasks are evaluated using the same data and comparable metrics, which enables researchers to consider them in unison, and hence, more effectively pool knowledge from different methods across different tasks. Additionally, we demonstrate several baselines for all tasks and show that approaches for one task can be applied to another with a quantifiable and explainable performance difference.
@inproceedings{athar2023burst,
title={BURST: A Benchmark for Unifying Object Recognition, Segmentation and Tracking in Video},
author={Athar, Ali and Luiten, Jonathon and Voigtlaender, Paul and Khurana, Tarasha and Dave, Achal and Leibe, Bastian and Ramanan, Deva},
booktitle={WACV},
year={2023}
}
Learning 3D Human Pose Estimation from Dozens of Datasets using a Geometry-Aware Autoencoder to Bridge Between Skeleton Formats
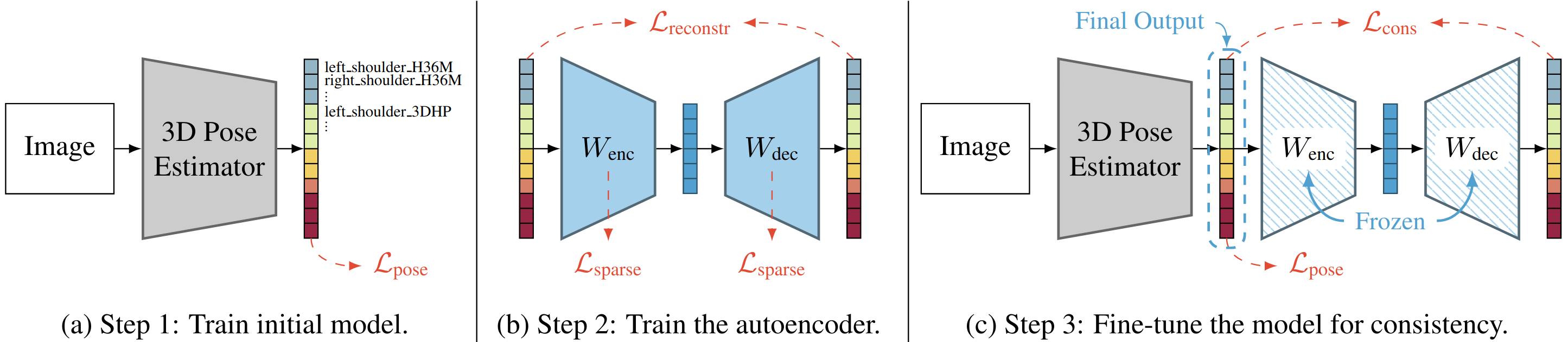
Deep learning-based 3D human pose estimation performs best when trained on large amounts of labeled data, making combined learning from many datasets an important research direction. One obstacle to this endeavor are the different skeleton formats provided by different datasets, i.e., they do not label the same set of anatomical landmarks. There is little prior research on how to best supervise one model with such discrepant labels. We show that simply using separate output heads for different skeletons results in inconsistent depth estimates and insufficient information sharing across skeletons. As a remedy, we propose a novel affine-combining autoencoder (ACAE) method to perform dimensionality reduction on the number of landmarks. The discovered latent 3D points capture the redundancy among skeletons, enabling enhanced information sharing when used for consistency regularization. Our approach scales to an extreme multi-dataset regime, where we use 28 3D human pose datasets to supervise one model, which outperforms prior work on a range of benchmarks, including the challenging 3D Poses in the Wild (3DPW) dataset. Our code and models are available for research purposes.
@inproceedings{Sarandi23WACV,
author = {S\'ar\'andi, Istv\'an and Hermans, Alexander and Leibe, Bastian},
title = {Learning {3D} Human Pose Estimation from Dozens of Datasets using a Geometry-Aware Autoencoder to Bridge Between Skeleton Formats},
booktitle = {IEEE/CVF Winter Conference on Applications of Computer Vision (WACV)},
year = {2023},
}
Mask3D for 3D Semantic Instance Segmentation
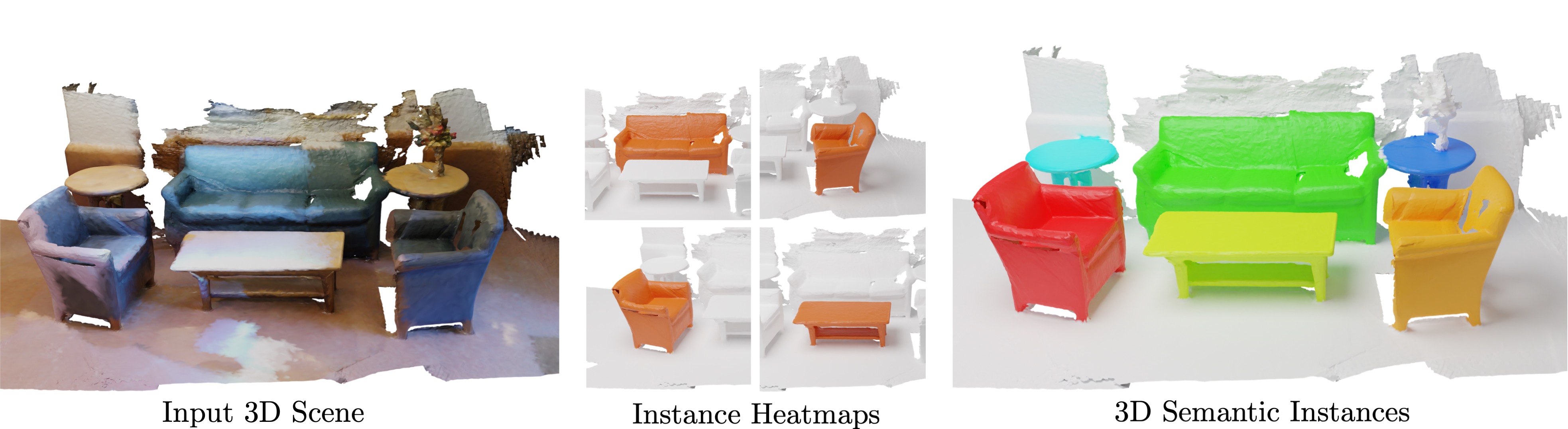
Modern 3D semantic instance segmentation approaches predominantly rely on specialized voting mechanisms followed by carefully designed geometric clustering techniques. Building on the successes of recent Transformer-based methods for object detection and image segmentation, we propose the first Transformer-based approach for 3D semantic instance segmentation. We show that we can leverage generic Transformer building blocks to directly predict instance masks from 3D point clouds. In our model called Mask3D each object instance is represented as an instance query. Using Transformer decoders, the instance queries are learned by iteratively attending to point cloud features at multiple scales. Combined with point features, the instance queries directly yield all instance masks in parallel. Mask3D has several advantages over current state-of-the-art approaches, since it neither relies on (1) voting schemes which require hand-selected geometric properties (such as centers) nor (2) geometric grouping mechanisms requiring manually-tuned hyper-parameters (e.g. radii) and (3) enables a loss that directly optimizes instance masks. Mask3D sets a new state-of-the-art on ScanNet test (+6.2 mAP), S3DIS 6-fold (+10.1 mAP), STPLS3D (+11.2 mAP) and ScanNet200 test (+12.4 mAP).
@article{Schult23ICRA,
title = {{Mask3D for 3D Semantic Instance Segmentation}},
author = {Schult, Jonas and Engelmann, Francis and Hermans, Alexander and Litany, Or and Tang, Siyu and Leibe, Bastian},
booktitle = {{International Conference on Robotics and Automation (ICRA)}},
year = {2023}
}
Neural Implicit Shape Editing Using Boundary Sensitivity
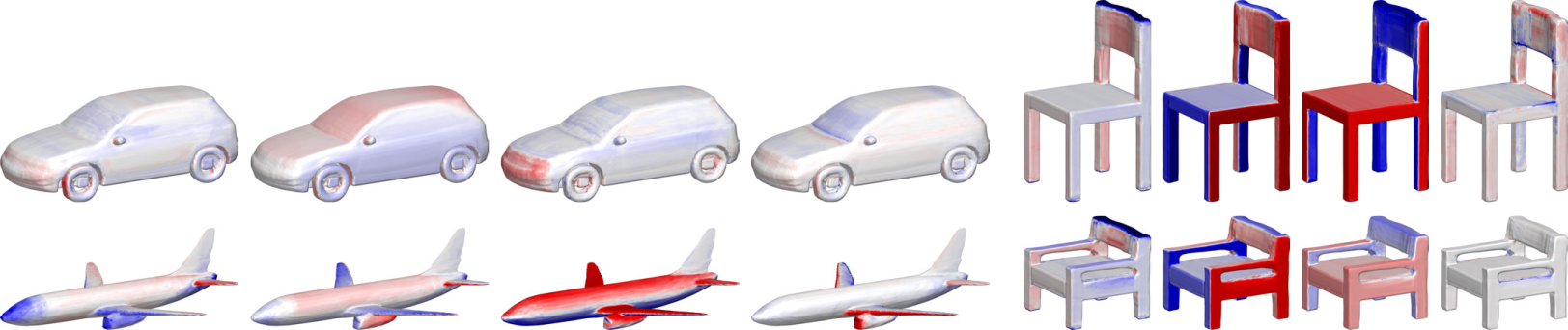
Neural fields are receiving increased attention as a geometric representation due to their ability to compactly store detailed and smooth shapes and easily undergo topological changes. Compared to classic geometry representations, however, neural representations do not allow the user to exert intuitive control over the shape. Motivated by this, we leverage boundary sensitivity to express how perturbations in parameters move the shape boundary. This allows to interpret the effect of each learnable parameter and study achievable deformations. With this, we perform geometric editing: finding a parameter update that best approximates a globally prescribed deformation. Prescribing the deformation only locally allows the rest of the shape to change according to some prior, such as semantics or deformation rigidity. Our method is agnostic to the model its training and updates the NN in-place. Furthermore, we show how boundary sensitivity helps to optimize and constrain objectives (such as surface area and volume), which are difficult to compute without first converting to another representation, such as a mesh.
@misc{berzins2023neural,
title={Neural Implicit Shape Editing using Boundary Sensitivity},
author={Arturs Berzins and Moritz Ibing and Leif Kobbelt},
year={2023},
eprint={2304.12951},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
Surface Maps via Adaptive Triangulations
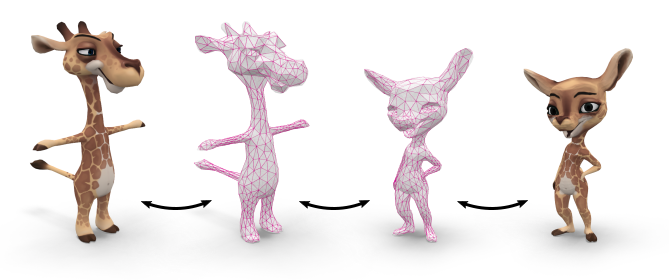
We present a new method to compute continuous and bijective maps (surface homeomorphisms) between two or more genus-0 triangle meshes. In contrast to previous approaches, we decouple the resolution at which a map is represented from the resolution of the input meshes. We discretize maps via common triangulations that approximate the input meshes while remaining in bijective correspondence to them. Both the geometry and the connectivity of these triangulations are optimized with respect to a single objective function that simultaneously controls mapping distortion, triangulation quality, and approximation error. A discrete-continuous optimization algorithm performs both energy-based remeshing as well as global second-order optimization of vertex positions, parametrized via the sphere. With this, we combine the disciplines of compatible remeshing and surface map optimization in a unified formulation and make a contribution in both fields. While existing compatible remeshing algorithms often operate on a fixed pre-computed surface map, we can now globally update this correspondence during remeshing. On the other hand, bijective surface-to-surface map optimization previously required computing costly overlay meshes that are inherently tied to the input mesh resolution. We achieve significant complexity reduction by instead assessing distortion between the approximating triangulations. This new map representation is inherently more robust than previous overlay-based approaches, is less intricate to implement, and naturally supports mapping between more than two surfaces. Moreover, it enables adaptive multi-resolution schemes that, e.g., first align corresponding surface regions at coarse resolutions before refining the map where needed. We demonstrate significant speedups and increased flexibility over state-of-the art mapping algorithms at similar map quality, and also provide a reference implementation of the method.
@article{schmidt2023surface,
title={Surface Maps via Adaptive Triangulations},
author={Schmidt, Patrick and Pieper, D\"orte and Kobbelt, Leif},
year={2023},
journal={Computer Graphics Forum},
volume={42},
number={2},
}
TENETvr: Comprehensible Temporal Teleportation in Time-Varying Virtual Environments

The iterative design process of virtual environments commonly generates a history of revisions that each represent the state of the scene at a different point in time. Browsing through these discrete time points by common temporal navigation interfaces like time sliders, however, can be inaccurate and lead to an uncomfortably high number of visual changes in a short time. In this paper, we therefore present a novel technique called TENETvr (Temporal Exploration and Navigation in virtual Environments via Teleportation) that allows for efficient teleportation-based travel to time points in which a particular object of interest changed. Unlike previous systems, we suggest that changes affecting other objects in the same time span should also be mediated before the teleport to improve predictability. We therefore propose visualizations for nine different types of additions, property changes, and deletions. In a formal user study with 20 participants, we confirmed that this addition leads to significantly more efficient change detection, lower task loads, and higher usability ratings, therefore reducing temporal disorientation.
@INPROCEEDINGS{10316438,
author={Rupp, Daniel and Kuhlen, Torsten and Weissker, Tim},
booktitle={2023 IEEE International Symposium on Mixed and Augmented Reality (ISMAR)},
title={{TENETvr: Comprehensible Temporal Teleportation in Time-Varying Virtual Environments}},
year={2023},
volume={},
number={},
pages={922-929},
doi={10.1109/ISMAR59233.2023.00108}}
Who Did What When? Discovering Complex Historical Interrelations in Immersive Virtual Reality
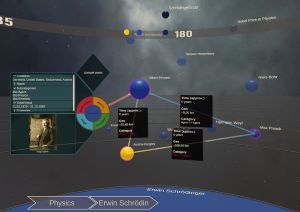
Traditional digital tools for exploring historical data mostly rely on conventional 2D visualizations, which often cannot reveal all relevant interrelationships between historical fragments (e.g., persons or events). In this paper, we present a novel interactive exploration tool for historical data in VR, which represents fragments as spheres in a 3D environment and arranges them around the user based on their temporal, geo, categorical and semantic similarity. Quantitative and qualitative results from a user study with 29 participants revealed that most participants considered the virtual space and the abstract fragment representation well-suited to explore historical data and to discover complex interrelationships. These results were particularly underlined by high usability scores in terms of attractiveness, stimulation, and novelty, while researching historical facts with our system did not impose unexpectedly high task loads. Additionally, the insights from our post-study interviews provided valuable suggestions for future developments to further expand the possibilities of our system.
@INPROCEEDINGS{10316480,
author={Derksen, Melanie and Becker, Julia and Elahi, Mohammad Fazleh and Maier, Angelika and Maile, Marius and Pätzold, Ingo and Penningroth, Jonas and Reglin, Bettina and Rothgänger, Markus and Cimiano, Philipp and Schubert, Erich and Schwandt, Silke and Kuhlen, Torsten and Botsch, Mario and Weissker, Tim},
booktitle={2023 IEEE International Symposium on Mixed and Augmented Reality (ISMAR)},
title={{Who Did What When? Discovering Complex Historical Interrelations in Immersive Virtual Reality}},
year={2023},
volume={},
number={},
pages={129-137},
doi={10.1109/ISMAR59233.2023.00027}}
Stay Vigilant: The Threat of a Replication Crisis in VR Locomotion Research
The ability to reproduce previously published research findings is an important cornerstone of the scientific knowledge acquisition process. However, the exact details required to reproduce empirical experiments vary depending on the discipline. In this paper, we summarize key replication challenges as well as their specific consequences for VR locomotion research. We then present the results of a literature review on artificial locomotion techniques, in which we analyzed 61 papers published in the last five years with respect to their report of essential details required for reproduction. Our results indicate several issues in terms of the description of the experimental setup, the scientific rigor of the research process, and the generalizability of results, which altogether points towards a potential replication crisis in VR locomotion research. As a countermeasure, we provide guidelines to assist researchers with reporting future artificial locomotion experiments in a reproducible form.
Best Paper Award!
@inproceedings{10.1145/3611659.3615697,
author = {Zielasko, Daniel and Weissker, Tim},
title = {Stay Vigilant: The Threat of a Replication Crisis in VR Locomotion Research},
year = {2023},
isbn = {9798400703287},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3611659.3615697},
doi = {10.1145/3611659.3615697},
abstract = {The ability to reproduce previously published research findings is an important cornerstone of the scientific knowledge acquisition process. However, the exact details required to reproduce empirical experiments vary depending on the discipline. In this paper, we summarize key replication challenges as well as their specific consequences for VR locomotion research. We then present the results of a literature review on artificial locomotion techniques, in which we analyzed 61 papers published in the last five years with respect to their report of essential details required for reproduction. Our results indicate several issues in terms of the description of the experimental setup, the scientific rigor of the research process, and the generalizability of results, which altogether points towards a potential replication crisis in VR locomotion research. As a countermeasure, we provide guidelines to assist researchers with reporting future artificial locomotion experiments in a reproducible form.},
booktitle = {Proceedings of the 29th ACM Symposium on Virtual Reality Software and Technology},
articleno = {39},
numpages = {10},
keywords = {Reproducibility, Virtual Reality, Replication Crisis, Teleportation, Locomotion, Steering},
location = {Christchurch, New Zealand},
series = {VRST '23}
}
Who's next? Integrating Non-Verbal Turn-Taking Cues for Embodied Conversational Agents

Taking turns in a conversation is a delicate interplay of various signals, which we as humans can easily decipher. Embodied conversational agents (ECAs) communicating with humans should leverage this ability for smooth and enjoyable conversations. Extensive research hasanalyzed human turn-taking cues, and attempts have been made to predict turn-taking based on observed cues. These cues vary from prosodic, semantic, and syntactic modulation over adapted gesture and gaze behavior to actively used respiration. However, when generating such behavior for social robots or ECAs, often only single modalities were considered, e.g., gazing. We strive to design a comprehensive system that produces cues for all non-verbal modalities: gestures, gaze, and breathing. The system provides valuable cues without requiring speech content adaptation. We evaluated our system in a VR based user study with N = 32 participants executing two subsequent tasks. First, we asked them to listen to two ECAs taking turns in several conversations. Second, participants engaged in taking turns with one of the ECAs directly. We examined the system’s usability and the perceived social presence of the ECAs' turn-taking behavior, both with respect to each individual non-verbal modality and their interplay. While we found effects of gesture manipulation in interactions with the ECAs, no effects on social presence were found.
This work is licensed under a Creative Commons Attribution International 4.0 License
@InProceedings{Ehret2023,
author = {Jonathan Ehret, Andrea Bönsch, Patrick Nossol, Cosima A. Ermert, Chinthusa Mohanathasan, Sabine J. Schlittmeier, Janina Fels and Torsten W. Kuhlen},
booktitle = {ACM International Conference on Intelligent Virtual Agents (IVA ’23)},
title = {Who's next? Integrating Non-Verbal Turn-Taking Cues for Embodied Conversational Agents},
year = {2023},
organization = {ACM},
pages = {8},
doi = {10.1145/3570945.3607312},
}
Micropolar Elasticity in Physically-Based Animation
We explore micropolar materials for the simulation of volumetric deformable solids. In graphics, micropolar models have only been used in the form of one-dimensional Cosserat rods, where a rotating frame is attached to each material point on the one-dimensional centerline. By carrying this idea over to volumetric solids, every material point is associated with a microrotation, an independent degree of freedom that can be coupled to the displacement through a material's strain energy density. The additional degrees of freedom give us more control over bending and torsion modes of a material. We propose a new orthotropic micropolar curvature energy that allows us to make materials stiff to bending in specific directions.
For the simulation of dynamic micropolar deformables we propose a novel incremental potential formulation with a consistent FEM discretization that is well suited for the use in physically-based animation. This allows us to easily couple micropolar deformables with dynamic collisions through a contact model inspired from the Incremental Potential Contact (IPC) approach. For the spatial discretization with FEM we discuss the challenges related to the rotational degrees of freedom and propose a scheme based on the interpolation of angular velocities followed by quaternion time integration at the quadrature points.
In our evaluation we validate the consistency and accuracy of our discretization approach and demonstrate several compelling use cases for micropolar materials. This includes explicit control over bending and torsion stiffness, deformation through prescription of a volumetric curvature field and robust interaction of micropolar deformables with dynamic collisions.
@article{LFJ+23,
author = {L\"{o}schner, Fabian and Fern\'{a}ndez-Fern\'{a}ndez, Jos\'{e} Antonio and Jeske, Stefan Rhys and Longva, Andreas and Bender, Jan},
title = {Micropolar Elasticity in Physically-Based Animation},
year = {2023},
issue_date = {August 2023},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {6},
number = {3},
url = {https://doi.org/10.1145/3606922},
doi = {10.1145/3606922},
journal = {Proceedings of the ACM on Computer Graphics and Interactive Techniques},
month = {aug},
articleno = {46},
numpages = {24}
}
A comparison of linear consistent correction methods for first-order SPH derivatives
A well-known issue with the widely used Smoothed Particle Hydrodynamics (SPH) method is the neighborhood deficiency. Near the surface, the SPH interpolant fails to accurately capture the underlying fields due to a lack of neighboring particles. These errors may introduce ghost forces or other visual artifacts into the simulation.
In this work we investigate three different popular methods to correct the first-order spatial derivative SPH operators up to linear accuracy, namely the Kernel Gradient Correction (KGC), Moving Least Squares (MLS) and Reproducing Kernel Particle Method (RKPM). We provide a thorough, theoretical comparison in which we remark strong resemblance between the aforementioned methods. We support this by an analysis using synthetic test scenarios. Additionally, we apply the correction methods in simulations with boundary handling, viscosity, surface tension, vorticity and elastic solids to showcase the reduction or elimination of common numerical artifacts like ghost forces. Lastly, we show that incorporating the correction algorithms in a state-of-the-art SPH solver only incurs a negligible reduction in computational performance.
@article{WJB23,
author = {Westhofen, Lukas and Jeske, Stefan and Bender, Jan},
title = {A Comparison of Linear Consistent Correction Methods for First-Order SPH Derivatives},
year = {2023},
issue_date = {August 2023},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {6},
number = {3},
url = {https://doi.org/10.1145/3606933},
doi = {10.1145/3606933},
journal = {Proceedings of the ACM on Computer Graphics and Interactive Techniques (SCA)},
month = {aug},
articleno = {48},
numpages = {20}
}
Effect of Head-Mounted Displays on Students’ Acquisition of Surgical Suturing Techniques Compared to an E-Learning and Tutor-Led Course: A Randomized Controlled Trial

Background: Although surgical suturing is one of the most important basic skills, many medical school graduates do not acquire sufficient knowledge of it due to its lack of integration into the curriculum or a shortage of tutors. E learning approaches attempt to address this issue but still rely on the involvement of tutors. Furthermore, the learning experience and visual spatial ability appear to play a critical role in surgical skill acquisition. Virtual reality head-mounted displays (HMDs) could address this, but the benefits of immersive and stereoscopic learning of surgical suturing techniques are still unclear.
Material and Methods: In this multi-arm randomized controlled trial, 150 novices participated. Three teaching modalities were compared: an e-learning course (monoscopic), an HMD-based course (stereoscopic, immersive), both self-directed, and a tutor-led course with feedback. Suturing performance was recorded by video camera both before and after course participation (>26 hours of video material) and assessed in a blinded fashion using the OSATS Global Rating Score (GRS). Furthermore, the optical flow of the videos was determined using an algorithm. The number of sutures performed was counted, visual spatial ability was measured with the mental rotation test (MRT), and courses were assessed with questionnaires.
Results: Students' self-assessment in the HMD-based course was comparable to that of the tutor-led course and significantly better than in the e-learning course (P=0.003). Course suitability was rated best for the tutor-led course (x=4.8), followed by the HMD-based (x=3.6) and e-learning (x=2.5) courses. The median GRS between courses was comparable (P=0.15) at 12.4 (95% CI 10.0 12.7) for the e-learning course, 14.1 (95% CI 13.0-15.0) for the HMD-based course, and 12.7 (95% CI 10.3-14.2) for the tutor-led course. However, the GRS was significantly correlated with the number of sutures performed during the training session (P=0.002), but not with visual-spatial ability (P=0.626). Optical flow (R2=0.15, P<0.001) and the number of sutures performed (R2=0.73, P<0.001) can be used as additional measures to GRS.
Conclusion: The use of HMDs with stereoscopic and immersive video provides advantages in the learning experience and should be preferred over a traditional web application for e-learning. Contrary to expectations, feedback is not necessary for novices to achieve a sufficient level in suturing; only the number of surgical sutures performed during training is a good determinant of competence improvement. Nevertheless, feedback still enhances the learning experience. Therefore, automated assessment as an alternative feedback approach could further improve self-directed learning modalities. As a next step, the data from this study could be used to develop such automated AI-based assessments.
@Article{Peters2023,
author = {Philipp Peters and Martin Lemos and Andrea Bönsch and Mark Ooms and Max Ulbrich and Ashkan Rashad and Felix Krause and Myriam Lipprandt and Torsten Wolfgang Kuhlen and Rainer Röhrig and Frank Hölzle and Behrus Puladi},
journal = {International Journal of Surgery},
title = {Effect of head-mounted displays on students' acquisition of surgical suturing techniques compared to an e-learning and tutor-led course: A randomized controlled trial},
year = {2023},
month = {may},
volume = {Publish Ahead of Print},
creationdate = {2023-05-12T11:00:37},
doi = {10.1097/js9.0000000000000464},
modificationdate = {2023-05-12T11:00:37},
publisher = {Ovid Technologies (Wolters Kluwer Health)},
}
Consistent SPH Rigid-Fluid Coupling

A common way to handle boundaries in SPH fluid simulations is to sample the surface of the boundary geometry using particles. These boundary particles are assigned the same properties as the fluid particles and are considered in the pressure force computation to avoid a penetration of the boundary. However, the pressure solver requires a pressure value for each particle. These are typically not computed for the boundary particles due to the computational overhead. Therefore, several strategies have been investigated in previous works to obtain boundary pressure values. A popular, simple technique is pressure mirroring, which mirrors the values from the fluid particles. This method is efficient, but may cause visual artifacts. More complex approaches like pressure extrapolation aim to avoid these artifacts at the cost of computation time.
We introduce a constraint-based derivation of Divergence-Free SPH (DFSPH) --- a common state-of-the-art pressure solver. This derivation gives us new insights on how to integrate boundary particles in the pressure solve without the need of explicitly computing boundary pressure values. This yields a more elegant formulation of the pressure solver that avoids the aforementioned problems.
@inproceedings {BWJ23,
booktitle = {Vision, Modeling, and Visualization},
title = {{Consistent SPH Rigid-Fluid Coupling}},
author = {Jan Bender and Lukas Westhofen and Stefan Rhys Jeske},
year = {2023},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-232-5},
DOI = {10.2312/vmv.20231244}
}
Weighted Laplacian Smoothing for Surface Reconstruction of Particle-based Fluids
Vision, Modeling and Visualization

In physically-based animation, producing detailed and realistic surface reconstructions for rendering is an important part of a simulation pipeline for particle-based fluids. In this paper we propose a post-processing approach to obtain smooth surfaces from "blobby" marching cubes triangulations without visual volume loss or shrinkage of drops and splashes. In contrast to other state-of-the-art methods that often require changes to the entire reconstruction pipeline our approach is easy to implement and less computationally expensive.
The main component is Laplacian mesh smoothing with our proposed feature weights that dampen the smoothing in regions of the mesh with splashes and isolated particles without reducing effectiveness in regions that are supposed to be flat. In addition, we suggest a specialized decimation procedure to avoid artifacts due to low-quality triangle configurations generated by marching cubes and a normal smoothing pass to further increase quality when visualizing the mesh with physically-based rendering. For improved computational efficiency of the method, we outline the option of integrating computation of our weights into an existing reconstruction pipeline as most involved quantities are already known during reconstruction. Finally, we evaluate our post-processing implementation on high-resolution smoothed particle hydrodynamics (SPH) simulations.
@inproceedings {LBJB23,
booktitle = {Vision, Modeling, and Visualization},
title = {{Weighted Laplacian Smoothing for Surface Reconstruction of Particle-based Fluids}},
author = {Fabian L\"{o}schner and Timna B\"{o}ttcher and Stefan Rhys Jeske and Jan Bender},
year = {2023},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-232-5},
DOI = {10.2312/vmv.20231245}
}
Leveraging BC6H Texture Compression and Filtering for Efficient Vector Field Visualization
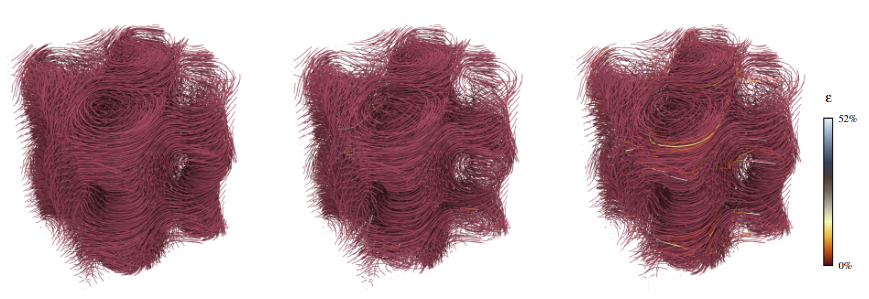
The steady advance of compute hardware is accompanied by an ever-steeper amount of data to be processed for visualization. Limited memory bandwidth provides a significant bottleneck to the runtime performance of visualization algorithms while limited video memory requires complex out-of-core loading techniques for rendering large datasets. Data compression methods aim to overcome these limitations, potentially at the cost of information loss. This work presents an approach to the compression of large data for flow visualization using the BC6H texture compression format natively supported, and therefore effortlessly leverageable, on modern GPUs. We assess the performance and accuracy of BC6H for compression of steady and unsteady vector fields and investigate its applicability to particle advection. The results indicate an improvement in memory utilization as well as runtime performance, at a cost of moderate loss in precision.
@inproceedings{10.2312:vmv.20231238,
booktitle = {Vision, Modeling, and Visualization},
editor = {Guthe, Michael and Grosch, Thorsten},
title = {{Leveraging BC6H Texture Compression and Filtering for Efficient Vector Field Visualization}},
author = {Oehrl, Simon and Milke, Jan Frieder and Koenen, Jens and Kuhlen, Torsten W. and Gerrits, Tim},
year = {2023},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-232-5},
DOI = {10.2312/vmv.20231238}
}
Voice Quality and its Effects on University Students' Listening Effort in a Virtual Seminar Room
A teacher’s poor voice quality may increase listening effort in pupils, but it is unclear whether this effect persists in adult listeners. Thus, the goal of this study is to examine the impact of vocal hoarseness on university students' listening effort in a virtual seminar room. An audio-visual immersive virtual reality environment is utilized to simulate a typical seminar room with common background sounds and fellow students represented as wooden mannequins. Participants wear a head-mounted display and are equipped with two controllers to engage in a dual-task paradigm. The primary task is to listen to a virtual professor reading short texts and retain relevant content information to be recalled later. The texts are presented either in a normal or an imitated hoarse voice. In parallel, participants perform a secondary task which is responding to tactile vibration patterns via the controllers. It is hypothesized that listening to the hoarse voice induces listening effort, resulting in more cognitive resources needed for primary task performance while secondary task performance is hindered. Results are presented and discussed in light of students’ cognitive performance and listening challenges in higher education learning environments.
@INPROCEEDINGS{Schiller:977871,
author = {Schiller, Isabel Sarah and Aspöck, Lukas and Breuer,
Carolin and Ehret, Jonathan and Bönsch, Andrea and Fels,
Janina and Kuhlen, Torsten and Schlittmeier, Sabine Janina},
title = {{V}oice Quality and its Effects on University
Students' Listening Effort in a Virtual Seminar Room},
year = {2023},
month = {Dec},
date = {2023-12-04},
organization = {Acoustics 2023, Sydney (Australia), 4
Dec 2023 - 8 Dec 2023},
doi = {10.1121/10.0022982}
}
Poster: DaVE - A curated Database of Visualization Examples

Visualization is used throughout all scientific domains for efficient analysis of data and experiments. Learning, underestanding, implementing, and applying suitable, state-of-the-art visualization techniques in HPC projects takes time and and a high level of technological ability and experience. DaVE sets out to offer a user-friendly resource with detailed descriptions, samples, and HPC-specific implementations of visualization methods. It simplifies method discovery with tags and encourages collaboration to foster a platform for sharing best practices and staying updated thus filling a crucial gap in the HPC community by providing a central resource for advanced visualization.
@misc{tim_gerrits_2023_8381126,
author = {Tim Gerrits and
Christoph Garth},
title = {{DaVE - A curated Database of Visualization
Examples}},
month = sep,
year = 2023,
publisher = {Zenodo},
doi = {10.5281/zenodo.8381126},
url = {https://doi.org/10.5281/zenodo.8381126}
}
A Case Study on Providing Accessibility-Focused In-Transit Architectures for Neural Network Simulation and Analysis
Due to the ever-increasing availability of high-performance computing infrastructure, developers can simulate increasingly complex models. However, the increased complexity comes with new challenges regarding data processing and visualization due to the sheer size of simulations. Exploring simulation results needs to be handled efficiently via in-situ/in-transit analysis during run-time. However, most existing in-transit solutions require sophisticated and prior knowledge and significant alteration to existing simulation and visualization code, which produces a high entry barrier for many projects. In this work, we report how Insite, a lightweight in-transit pipeline, provided in-transit visualization and computation capability to various research applications in the neuronal network simulation domain. We describe the development process, including feedback from developers and domain experts, and discuss implications.
@inproceedings{kruger2023case,
title={A Case Study on Providing Accessibility-Focused In-Transit Architectures for Neural Network Simulation and Analysis},
author={Kr{\"u}ger, Marcel and Oehrl, Simon and Kuhlen, Torsten Wolfgang and Gerrits, Tim},
booktitle={International Conference on High Performance Computing},
pages={277--287},
year={2023},
organization={Springer}
}
Towards Plausible Cognitive Research in Virtual Environments: The Effect of Audiovisual Cues on Short-Term Memory in Two Talker Conversations
When three or more people are involved in a conversation, often one conversational partner listens to what the others are saying and has to remember the conversational content. The setups in cognitive-psychological experiments often differ substantially from everyday listening situations by neglecting such audiovisual cues. The presence of speech-related audiovisual cues, such as the spatial position, and the appearance or non-verbal behavior of the conversing talkers may influence the listener's memory and comprehension of conversational content. In our project, we provide first insights into the contribution of acoustic and visual cues on short-term memory, and (social) presence. Analyses have shown that the memory performance varies with increasingly more plausible audiovisual characteristics. Furthermore, we have conducted a series of experiments regarding the influence of the visual reproduction medium (virtual reality vs. traditional computer screens) and spatial or content audio-visual mismatch on auditory short-term memory performance. Adding virtual embodiments to the talkers allowed us to conduct experiments on the influence of the fidelity of co-verbal gestures and turn-taking signals. Thus, we are able to provide a more plausible paradigm for investigating memory for two-talker conversations within an interactive audiovisual virtual reality environment.
@InProceedings{Ehret2023Audictive,
author = {Jonathan Ehret, Cosima A. Ermert, Chinthusa
Mohanathasan, Janina Fels, Torsten W. Kuhlen and Sabine J. Schlittmeier},
booktitle = {Proceedings of the 1st AUDICTIVE Conference},
title = {Towards Plausible Cognitive Research in Virtual
Environments: The Effect of Audiovisual Cues on Short-Term Memory in
Two-Talker Conversations},
year = {2023},
pages = {68-72},
doi = { 10.18154/RWTH-2023-08409},
}
DasherVR: Evaluating a Predictive Text Entry System in Immersive Virtual Reality
Inputting text fluently in virtual reality is a topic still under active research, since many previously presented solutions have drawbacks in either speed, error rate, privacy or accessibility. To address these drawbacks, in this paper we adapted the predictive text entry system "Dasher" into an immersive virtual environment. Our evaluation with 20 participants shows that Dasher offers a good user experience with input speeds similar to other virtual text input techniques in the literature while maintaining low error rates. In combination with positive user feedback, we therefore believe that DasherVR is a promising basis for further research on accessible text input in immersive virtual reality.
@inproceedings{pape2023,
title = {{{DasherVR}}: {{Evaluating}} a {{Predictive Text Entry System}} in {{Immersive Virtual Reality}}},
booktitle = {Towards an {{Inclusive}} and {{Accessible Metaverse}} at {{CHI}}'23},
author = {Pape, Sebastian and Ackermann, Jan Jakub and Weissker, Tim and Kuhlen, Torsten W},
doi = {https://doi.org/10.18154/RWTH-2023-05093},
year = {2023}
}
A Case Study on Providing Immersive Visualization for Neuronal Network Data Using COTS Soft- and Hardware
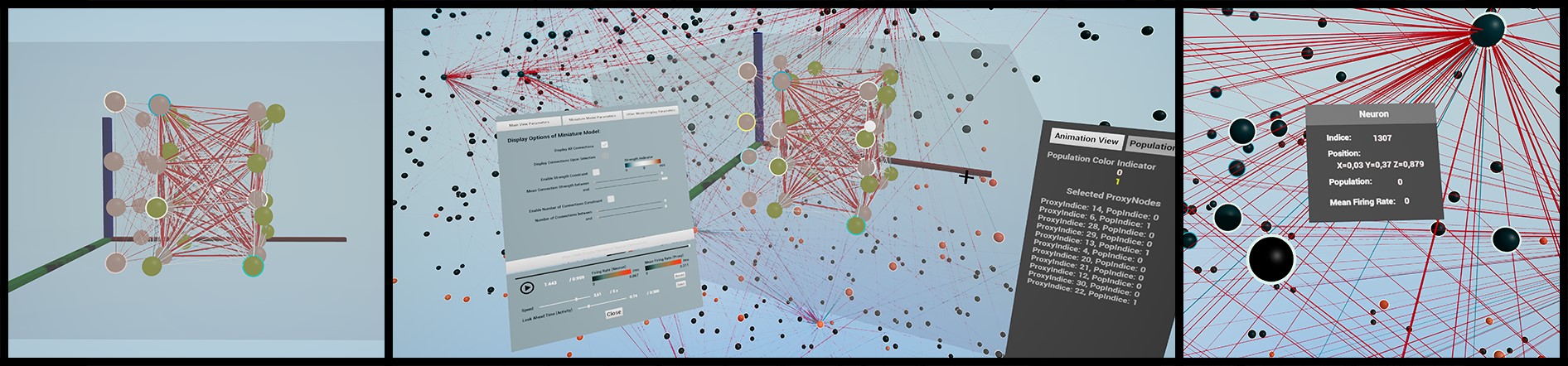
COTS VR hardware and modern game engines create the impression that bringing even complex data into VR has become easy. In this work, we investigate to what extent game engines can support the development of immersive visualization software with a case study. We discuss how the engine can support the development and where it falls short, e.g., failing to provide acceptable rendering performance for medium and large-sized data sets without using more sophisticated features.
@INPROCEEDINGS{10108843,
author={Krüger, Marcel and Li, Qin and Kuhlen, Torsten W. and Gerrits, Tim},
booktitle={2023 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
title={A Case Study on Providing Immersive Visualization for Neuronal Network Data Using COTS Soft- and Hardware},
year={2023},
volume={},
number={},
pages={201-205},
doi={10.1109/VRW58643.2023.00050}}
Enhanced Auditoriums for Attending Talks in Social Virtual Reality
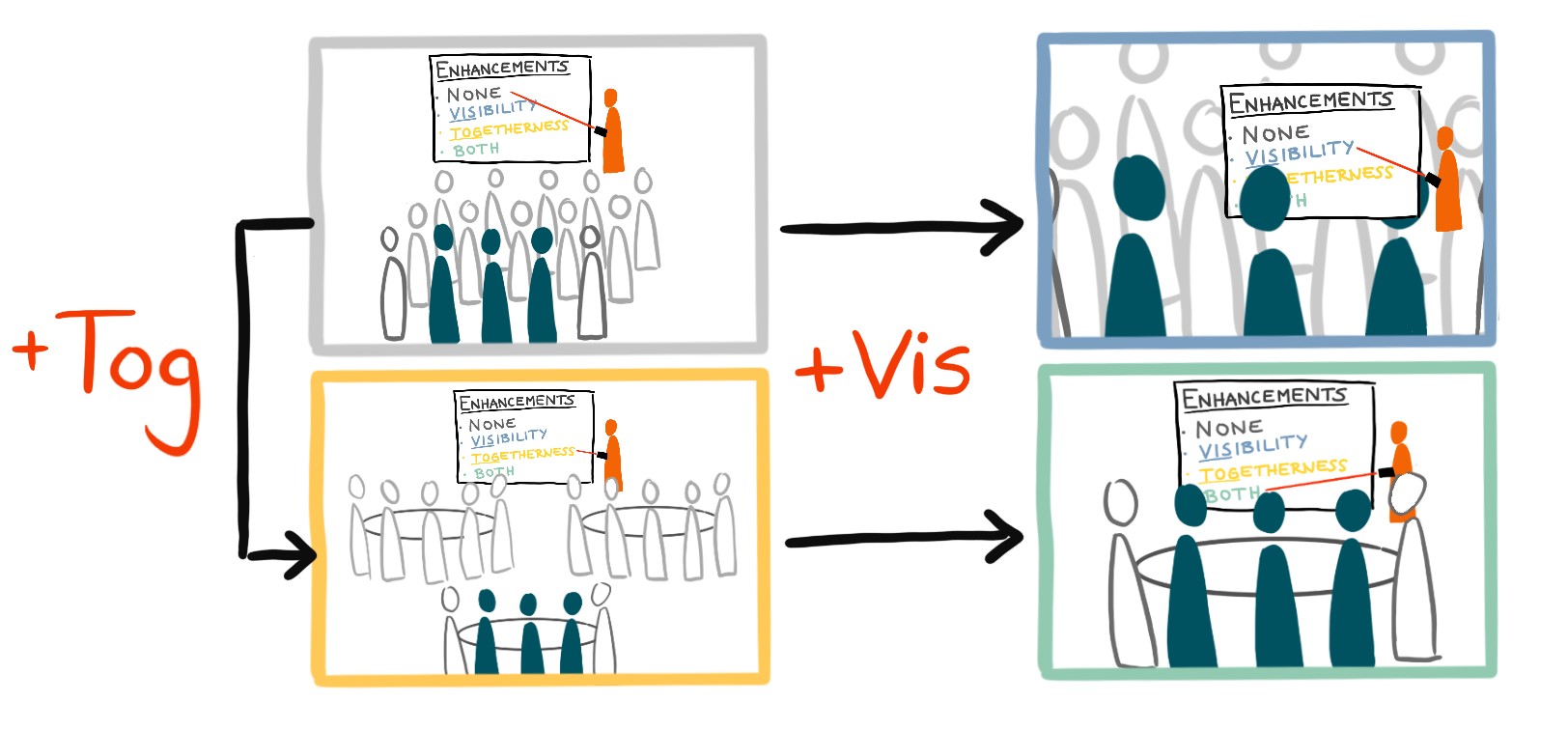
Replicating traditional auditorium layouts for attending talks in social virtual reality often results in poor visibility of the presentation and a reduced feeling of being there together with others. Motivated by the use case of academic conferences, we therefore propose to display miniature representations of the stage close to the viewers for enhanced presentation visibility as well as group table arrangements for enhanced social co-watching. We conducted an initial user study with 12 participants in groups of three to evaluate the influence of these ideas on audience experience. Our results confirm the hypothesized positive effects of both enhancements and show that their combination was particularly appreciated by audience members. Our results therefore strongly encourage us to rethink conventional auditorium layouts in social virtual reality.
@inproceedings{10.1145/3544549.3585718,
author = {Weissker, Tim and Pieters, Leander and Kuhlen, Torsten},
title = {Enhanced Auditoriums for Attending Talks in Social Virtual Reality},
year = {2023},
isbn = {9781450394222},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3544549.3585718},
doi = {10.1145/3544549.3585718},
abstract = {Replicating traditional auditorium layouts for attending talks in social virtual reality often results in poor visibility of the presentation and a reduced feeling of being there together with others. Motivated by the use case of academic conferences, we therefore propose to display miniature representations of the stage close to the viewers for enhanced presentation visibility as well as group table arrangements for enhanced social co-watching. We conducted an initial user study with 12 participants in groups of three to evaluate the influence of these ideas on audience experience. Our results confirm the hypothesized positive effects of both enhancements and show that their combination was particularly appreciated by audience members. Our results therefore strongly encourage us to rethink conventional auditorium layouts in social virtual reality.},
booktitle = {Extended Abstracts of the 2023 CHI Conference on Human Factors in Computing Systems},
articleno = {101},
numpages = {7},
keywords = {Audience Experience, Head-Mounted Display, Multi-User, Social Interaction, Virtual Presentations, Virtual Reality},
location = {<conf-loc>, <city>Hamburg</city>, <country>Germany</country>, </conf-loc>},
series = {CHI EA '23}
}
Advantages of a Training Course for Surgical Planning in Virtual Reality in Oral and Maxillofacial Surgery
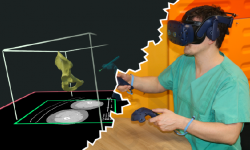
Background: As an integral part of computer-assisted surgery, virtual surgical planning(VSP) leads to significantly better surgery results, such as for oral and maxillofacial reconstruction with microvascular grafts of the fibula or iliac crest. It is performed on a 2D computer desktop (DS) based on preoperative medical imaging. However, in this environment, VSP is associated with shortcomings, such as a time-consuming planning process and the requirement of a learning process. Therefore, a virtual reality VR)-based VSP application has great potential to reduce or even overcome these shortcomings due to the benefits of visuospatial vision, bimanual interaction, and full immersion. However, the efficacy of such a VR environment has not yet been investigated.
Objective: Does VR offer advantages in learning process and working speed while providing similar good results compared to a traditional DS working environment?
Methods: During a training course, novices were taught how to use a software application in a DS environment (3D Slicer) and in a VR environment (Elucis) for the segmentation of fibulae and os coxae (n = 156), and they were askedto carry out the maneuvers as accurately and quickly as possible. The individual learning processes in both environments were compared usingobjective criteria (time and segmentation performance) and self-reported questionnaires. The models resulting from the segmentation were compared mathematically (Hausdorff distance and Dice coefficient) and evaluated by two experienced radiologists in a blinded manner (score).
Results: During a training course, novices were taught how to use a software application in a DS environment (3D Slicer) and in a VR environment (Elucis)for the segmentation of fibulae and os coxae (n = 156), and they were asked to carry out the maneuvers as accurately and quickly as possible. The individual learning processes in both environments were compared using objective criteria (time and segmentation performance) and self-reported questionnaires. The models resulting from the segmentation were compared mathematically (Hausdorff distance and Dice coefficient) and evaluated by two experienced radiologists in a blinded manner (score).
Conclusions: The more rapid learning process and the ability to work faster in the VR environment could save time and reduce the VSP workload, providing certain advantages over the DS environment.
@article{Ulbrich2022,
title={Advantages of a Training Course for Surgical Planning in Virtual
Reality in Oral and Maxillofacial Surgery },
author={ Ulbrich, M., Van den Bosch, V., Bönsch, A., Gruber, L.J., Ooms,
M., Melchior, C., Motmaen, I., Wilpert, C., Rashad, A., Kuhlen, T.W.,
Hölzle, F., Puladi, B.},
journal={JMIR Serious Games},
volume={ 28/11/2022:40541 (forthcoming/in press) },
year={2022},
publisher={JMIR Publications Inc., Toronto, Canada}
}
IEEE SciVis Contest 2023 - Dataset of Neuronal Network Simulations of the Human Brain
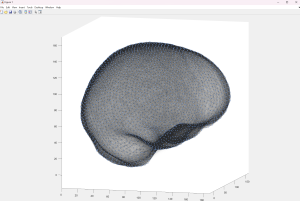
The IEEE SciVis Contest is held annually as part of the IEEE VIS Conference. It challenges participants within the visualization community to create innovative and effective state-of-the-art visualizations to analyze and understand complex scientific data. In 2023, the data described neuronal network simulations of plasticity changes in the human brain provided by a collaboration of the Crosssectional Group Parallelism and Performance, and the Crosssectional Group Visualization within the National High Performance Computing Center for Computational Engineering Science (NHR4CES).
@dataset{gerrits_2024_10519411,
author = {Gerrits, Tim and
Czappa, Fabian and
Banesh, Divya and
Wolf, Felix},
title = {{IEEE SciVis Contest 2023 - Dataset of Neuronal
Network Simulations of the Human Brain}},
month = jan,
year = 2024,
publisher = {Zenodo},
version = {1.0},
doi = {10.5281/zenodo.10519411},
url = {https://doi.org/10.5281/zenodo.10519411}
}
Poster: Memory and Listening Effort in Two-Talker Conversations: Does Face Visibility Help Us Remember?
Listening to and remembering conversational content is a highly demanding task that requires the interplay of auditory processes and several cognitive functions. In face-to-face conversations, it is quite impossible that two talker’s’ audio signals originate from the same spatial position and that their faces are hidden from view. The availability of such audiovisual cues when listening potentially influences memory and comprehension of the heard content. In the present study, we investigated the effect of static visual faces of two talkers and cognitive functions on the listener’s short-term memory of conversations and listening effort. Participants performed a dual-task paradigm including a primary listening task, where a conversation between two spatially separated talkers (+/- 60°) with static faces was presented. In parallel, a vibrotactile task was administered, independently of both visual and auditory modalities. To investigate the possibility of person-specific factors influencing short-term memory, we assessed additional cognitive functions like working memory. We discuss our results in terms of the role that visual information and cognitive functions play in short-term memory of conversations.
@InProceedings{ Mohanathasan2023ESCoP,
author = { Chinthusa Mohanathasan, Jonathan Ehret, Cosima A. Ermert, Janina Fels, Torsten Wolfgang Kuhlen and Sabine J. Schlittmeier},
booktitle = { 23. Conference of the European Society for Cognitive Psychology , Porto , Portugal , ESCoP 2023},
title = { Memory and Listening Effort in Two-Talker Conversations: Does Face Visibility Help Us Remember?},
year = {2023},
}
Towards More Realistic Listening Research in Virtual Environments: The Effect of Spatial Separation of Two Talkers in Conversations on Memory and Listening Effort
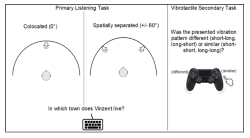
between three or more people often include phases in which one conversational partner is the listener while the others are conversing. In face-to-face conversations, it is quite unlikely to have two talkers’ audio signals come from the same spatial location - yet monaural-diotic sound presentation is often realized in cognitive-psychological experiments. However, the availability of spatial cues probably influences the cognitive processing of heard conversational content. In the present study we test this assumption by investigating spatial separation of conversing talkers in the listener’s short-term memory and listening effort. To this end, participants were administered a dual-task paradigm. In the primary task, participants listened to a conversation between two alternating talkers in a non-noisy setting and answered questions on the conversational content after listening. The talkers’ audio signals were presented at a distance of 2.5m from the listener either spatially separated (+/- 60°) or co-located (0°; within-subject). As a secondary task, participants worked in parallel to the listening task on a vibrotactile stimulation task, which is detached from auditory and visual modalities. The results are reported and discussed in particular regarding future listening experiments in virtual environments.
@InProceedings{Mohanathasan2023DAGA,
author = {Chinthusa Mohanathasan, Jonathan Ehret, Cosima A.
Ermert, Janina Fels, Torsten Wolfgang Kuhlen and Sabine J. Schlittmeier},
booktitle = {49. Jahrestagung für Akustik , Hamburg , Germany ,
DAGA 2023},
title = {Towards More Realistic Listening Research in Virtual
Environments: The Effect of Spatial Separation of Two Talkers in
Conversations on Memory and Listening Effort},
year = {2023},
pages = {1425-1428},
doi = { 10.18154/RWTH-2023-05116},
}
Towards Discovering Meaningful Historical Relationships in Virtual Reality
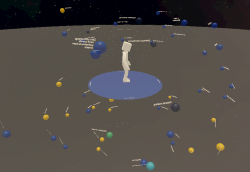
Traditional digital tools for exploring historical data mostly rely on conventional 2D visualizations, which often cannot reveal all relevant interrelationships between historical fragments. We are working on a novel interactive exploration tool for historical data in virtual reality, which arranges fragments in a 3D environment based on their temporal, spatial and categorical proximity to a reference fragment. In this poster, we report on an initial expert review of our approach, giving us valuable insights into the use cases and requirements that inform our further developments.
@INPROCEEDINGS{Derksen2023,
author={Derksen, Melanie and Weissker, Tim and Kuhlen, Torsten and Botsch, Mario},
booktitle={2023 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
title={Towards Discovering Meaningful Historical Relationships in Virtual Reality},
year={2023},
volume={},
number={},
pages={697-698},
doi={10.1109/VRW58643.2023.00191}}
Gaining the High Ground: Teleportation to Mid-Air Targets in Immersive Virtual Environments

Most prior teleportation techniques in virtual reality are bound to target positions in the vicinity of selectable scene objects. In this paper, we present three adaptations of the classic teleportation metaphor that enable the user to travel to mid-air targets as well. Inspired by related work on the combination of teleports with virtual rotations, our three techniques differ in the extent to which elevation changes are integrated into the conventional target selection process. Elevation can be specified either simultaneously, as a connected second step, or separately from horizontal movements. A user study with 30 participants indicated a trade-off between the simultaneous method leading to the highest accuracy and the two-step method inducing the lowest task load as well as receiving the highest usability ratings. The separate method was least suitable on its own but could serve as a complement to one of the other approaches. Based on these findings and previous research, we define initial design guidelines for mid-air navigation techniques.
@ARTICLE{10049698,
author={Weissker, Tim and Bimberg, Pauline and Gokhale, Aalok Shashidhar and Kuhlen, Torsten and Froehlich, Bernd},
journal={IEEE Transactions on Visualization and Computer Graphics},
title={Gaining the High Ground: Teleportation to Mid-Air Targets in Immersive Virtual Environments},
year={2023},
volume={29},
number={5},
pages={2467-2477},
keywords={Teleportation;Navigation;Avatars;Visualization;Task analysis;Floors;Virtual environments;Virtual Reality;3D User Interfaces;3D Navigation;Head-Mounted Display;Teleportation;Flying;Mid-Air Navigation},
doi={10.1109/TVCG.2023.3247114}}
Poster: Enhancing Proxy Localization in World in Miniatures Focusing on Virtual Agents

Virtual agents (VAs) are increasingly utilized in large-scale architectural immersive virtual environments (LAIVEs) to enhance user engagement and presence. However, challenges persist in effectively localizing these VAs for user interactions and optimally orchestrating them for an interactive experience. To address these issues, we propose to extend world in miniatures (WIMs) through different localization and manipulation techniques as these 3D miniature scene replicas embedded within LAIVEs have already demonstrated effectiveness for wayfinding, navigation, and object manipulation. The contribution of our ongoing research is thus the enhancement of manipulation and localization capabilities within WIMs, focusing on the use case of VAs.
@InProceedings{Boensch2023c,
author = {Andrea Bönsch, Radu-Andrei Coanda, and Torsten W.
Kuhlen},
booktitle = {{V}irtuelle und {E}rweiterte {R}ealit\"at, 14.
{W}orkshop der {GI}-{F}achgruppe {VR}/{AR}},
title = {Enhancing Proxy Localization in World in
Miniatures Focusing on Virtual Agents},
year = {2023},
organization = {Gesellschaft für Informatik e.V.},
doi = {10.18420/vrar2023_3381}
}
Poster: Whom Do You Follow? Pedestrian Flows Constraining the User’s Navigation during Scene Exploration

In this work-in-progress, we strive to combine two wayfinding techniques supporting users in gaining scene knowledge, namely (i) the River Analogy, in which users are considered as boats automatically floating down predefined rivers, e.g., streets in an urban scene, and (ii) virtual pedestrian flows as social cues indirectly guiding users through the scene. In our combined approach, the pedestrian flows function as rivers. To navigate through the scene, users leash themselves to a pedestrian of choice, considered as boat, and are dragged along the flow towards an area of interest. Upon arrival, users can detach themselves to freely explore the site without navigational constraints. We briefly outline our approach, and discuss the results of an initial study focusing on various leashing visualizations.
@InProceedings{Boensch2023b,
author = {Andrea Bönsch, Lukas B. Zimmermann, Jonathan Ehret, and Torsten W.Kuhlen},
booktitle = {ACM International Conferenceon Intelligent Virtual Agents (IVA ’23)},
title = {Whom Do You Follow? Pedestrian Flows Constraining the User’sNavigation during Scene Exploration},
year = {2023},
organization = {ACM},
pages = {3},
doi = {10.1145/3570945.3607350},
}
Poster: Where Do They Go? Overhearing Conversing Pedestrian Groups during Scene Exploration

On entering an unknown immersive virtual environment, a user’s first task is gaining knowledge about the respective scene, termed scene exploration. While many techniques for aided scene exploration exist, such as virtual guides, or maps, unaided wayfinding through pedestrians-as-cues is still in its infancy. We contribute to this research by indirectly guiding users through pedestrian groups conversing about their target location. A user who overhears the conversation without being a direct addressee can consciously decide whether to follow the group to reach an unseen point of interest. We outline our approach and give insights into the results of a first feasibility study in which we compared our new approach to non-talkative groups and groups conversing about random topics.
@InProceedings{Boensch2023a,
author = {Andrea Bönsch, Till Sittart, Jonathan Ehret, and Torsten W. Kuhlen},
booktitle = {ACM International Conference on Intelligent VirtualAgents (IVA ’23)},
title = {Where Do They Go? Overhearing Conversing Pedestrian Groups duringScene Exploration},
year = {2023},
pages = {3},
publisher = {ACM},
doi = {10.1145/3570945.3607351},
}
Octree Transformer: Autoregressive 3D Shape Generation on Hierarchically Structured Sequences
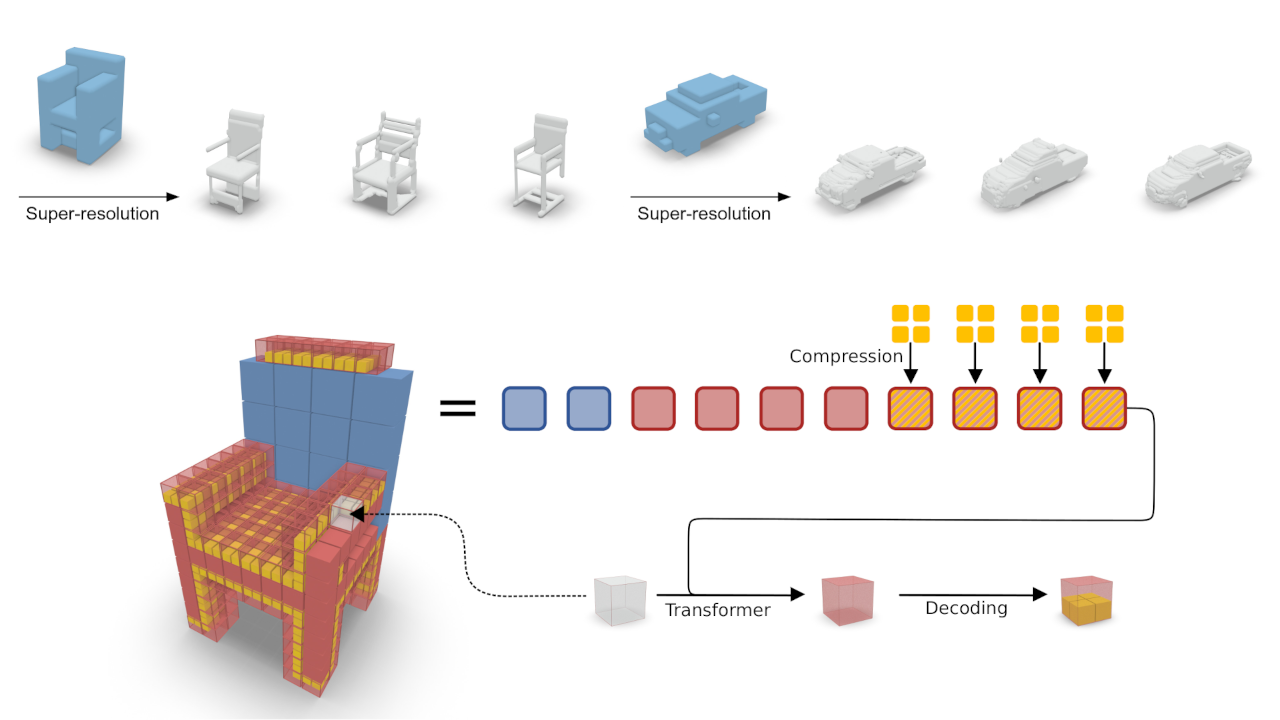
Autoregressive models have proven to be very powerful in NLP text generation tasks and lately have gained pop ularity for image generation as well. However, they have seen limited use for the synthesis of 3D shapes so far. This is mainly due to the lack of a straightforward way to linearize 3D data as well as to scaling problems with the length of the resulting sequences when describing complex shapes. In this work we address both of these problems. We use octrees as a compact hierarchical shape representation that can be sequentialized by traversal ordering. Moreover, we introduce an adaptive compression scheme, that significantly reduces sequence lengths and thus enables their effective generation with a transformer, while still allowing fully autoregressive sampling and parallel training. We demonstrate the performance of our model by performing superresolution and comparing against the state-of-the-art in shape generation.
@inproceedings{ibing_octree,
author = {Moritz Ibing and
Gregor Kobsik and
Leif Kobbelt},
title = {Octree Transformer: Autoregressive 3D Shape Generation on Hierarchically Structured Sequences},
booktitle = {{IEEE/CVF} Conference on Computer Vision and Pattern Recognition Workshops,
{CVPR} Workshops 2023},
publisher = {{IEEE}},
year = {2023},
}
AuViST - An Audio-Visual Speech and Text Database for the Heard-Text-Recall Paradigm
The Audio-Visual Speech and Text (AuViST) database provides additional material to the heardtext-recall (HTR) paradigm by Schlittmeier and colleagues. German audio recordings in male and female voice as well as matching face tracking data are provided for all texts.
Poster: Memory and Listening Effort in Conversations: The Role of Spatial Cues and Cognitive Functions
Conversations involving three or more people often include phases where one conversational partner listens to what the others are saying and has to remember the conversational content. It is possible that the presence of speech-related auditory information, such as different spatial positions of conversing talkers, influences listener's memory and comprehension of conversational content. However, in cognitive-psychological experiments, talkers’ audio signals are often presented diotically, i.e., identically to both ears as mono signals. This does not reflect face-to-face conversations where two talkers’ audio signals never come from the same spatial location. Therefore, in the present study, we examine how the spatial separation of two conversing talkers affects listener’s short-term memory of heard information and listening effort. To accomplish this, participants were administered a dual-task paradigm. In the primary task, participants listened to a conversation between a female and a male talker and then responded to content-related questions. The talkers’ audio signals were presented via headphones at a distance of 2.5m from the listener either spatially separated (+/- 60°) or co-located (0°). In parallel to this listening task, participants performed a vibrotactile pattern recognition task as a secondary task, that is independent of both auditory and visual modalities. In addition, we measured participants’ working memory capacity, selective visual attention, and mental speed to control for listener-specific characteristics that may affect listener’s memory performance. We discuss the extent to which spatial cues affect higher-level auditory cognition, specifically short-term memory of conversational content.
@InProceedings{ Mohanathasan2023TeaP,
author = { Chinthusa Mohanathasan, Jonathan Ehret, Cosima A.
Ermert, Janina Fels, Torsten Wolfgang Kuhlen and Sabine J. Schlittmeier},
booktitle = { Abstracts of the 65th TeaP : Tagung experimentell
arbeitender Psycholog:innen, Conference of Experimental Psychologists},
title = { Memory and Listening Effort in Conversations: The
Role of Spatial Cues and Cognitive Functions},
year = {2023},
pages = {252-252},
}
Audio-Visual Content Mismatches in the Serial Recall Paradigm
In many everyday scenarios, short-term memory is crucial for human interaction, e.g., when remembering a shopping list or following a conversation. A well-established paradigm to investigate short-term memory performance is the serial recall. Here, participants are presented with a list of digits in random order and are asked to memorize the order in which the digits were presented. So far, research in cognitive psychology has mostly focused on the effect of auditory distractors on the recall of visually presented items. The influence of visual distractors on the recall of auditory items has mostly been ignored. In the scope of this talk, we designed an audio-visual serial recall task. Along with the auditory presentation of the to-remembered digits, participants saw the face of a virtual human, moving the lips according to the spoken words. However, the gender of the face did not always match the gender of the voice heard, hence introducing an audio-visual content mismatch. The results give further insights into the interplay of visual and auditory stimuli in serial recall experiments.
@InProceedings{Ermert2023DAGA,
author = {Cosima A. Ermert, Jonathan Ehret, Torsten Wolfgang
Kuhlen, Chinthusa Mohanathasan, Sabine J. Schlittmeier and Janina Fels},
booktitle = {49. Jahrestagung für Akustik , Hamburg , Germany ,
DAGA 2023},
title = {Audio-Visual Content Mismatches in the Serial Recall
Paradigm},
year = {2023},
pages = {1429-1430},
}
Poster: Hoarseness among university professors and how it can influence students’ listening impression: an audio-visual immersive VR study

For university students, following a lecture can be challenging when room acoustic conditions are poor or when their professor suffers from a voice disorder. Related to the high vocal demands of teaching, university professors develop voice disorders quite frequently. The key symptom is hoarseness. The aim of this study is to investigate the effect of hoarseness on university students’ subjective listening effort and listening impression using audio-visual immersive virtual reality (VR) including a real-time room simulation of a typical seminar room. Equipped with a head-mounted display, participants are immersed in the virtual seminar room, with typical binaural background sounds, where they perform a listening task. This task involves comprehending and recalling information from text, read aloud by a female virtual professor positioned in front of the seminar room. Texts are presented in two experimental blocks, one of them read aloud in a normal (modal) voice, the other one in a hoarse voice. After each block, participants fill out a questionnaire to evaluate their perceived listening effort and overall listening impression under the respective voice quality, as well as the human-likeliness of and preferences towards the virtual professor. Results are presented and discussed regarding voice quality design for virtual tutors and potential impli-cations for students’ motivation and performance in academic learning spaces.
@InProceedings{Schiller2023Audictive,
author = {Isabel S. Schiller, Lukas Aspöck, Carolin Breuer,
Jonathan Ehret and Andrea Bönsch},
booktitle = {Proceedings of the 1st AUDICTIVE Conference},
title = {Hoarseness among university professors and how it can
influence students’ listening impression: an audio-visual immersive VR
study},
year = {2023},
pages = {134-137},
doi = { 10.18154/RWTH-2023-08885},
}
Does a Talker's Voice Quality Affect University Students' Listening Effort in a Virtual Seminar Room?

A university professor's voice quality can either facilitate or impede effective listening in students. In this study, we investigated the effect of hoarseness on university students’ listening effort in seminar rooms using audio-visual virtual reality (VR). During the experiment, participants were immersed in a virtual seminar room with typical background sounds and performed a dual-task paradigm involving listening to and answering questions about short stories, narrated by a female virtual professor, while responding to tactile vibration patterns. In a within-subject design, the professor's voice quality was varied between normal and hoarse. Listening effort was assessed based on performance and response time measures in the dual-task paradigm and participants’ subjective evaluation. It was hypothesized that listening to a hoarse voice leads to higher listening effort. While the analysis is still ongoing, our preliminary results show that listening to the hoarse voice significantly increased perceived listening effort. In contrast, the effect of voice quality was not significant in the dual-task paradigm. These findings indicate that, even if students' performance remains unchanged, listening to hoarse university professors may still require more effort.
@INBOOK{Schiller:977866,
author = {Schiller, Isabel Sarah and Bönsch, Andrea and Ehret,
Jonathan and Breuer, Carolin and Aspöck, Lukas},
title = {{D}oes a talker's voice quality affect university
students' listening effort in a virtual seminar room?},
address = {Turin},
publisher = {European Acoustics Association},
pages = {2813-2816},
year = {2024},
booktitle = {Proceedings of the 10th Convention of
the European Acoustics Association :
Forum Acusticum 2023. Politecnico di
Torino, Torino, Italy, September 11 -
15, 2023 / Editors: Arianna Astolfi,
Francesco Asdrudali, Louena Shtrepi},
month = {Sep},
date = {2023-09-11},
organization = {10. Convention of the European
Acoustics Association : Forum
Acusticum, Turin (Italy), 11 Sep 2023 -
15 Sep 2023},
doi = {10.61782/fa.2023.0320},
}
Localized Latent Updates for Fine-Tuning Vision-Language Models
Although massive pre-trained vision-language models like CLIP show impressive generalization capabilities for many tasks, still it often remains necessary to fine-tune them for improved performance on specific datasets. When doing so, it is desirable that updating the model is fast and that the model does not lose its capabilities on data outside of the dataset, as is often the case with classical fine-tuning approaches. In this work we suggest a lightweight adapter that only updates the models predictions close to seen datapoints. We demonstrate the effectiveness and speed of this relatively simple approach in the context of few-shot learning, where our results both on classes seen and unseen during training are comparable with or improve on the state of the art.
@inproceedings{ibing_localized,
author = {Moritz Ibing and
Isaak Lim and
Leif Kobbelt},
title = {Localized Latent Updates for Fine-Tuning Vision-Language Models},
booktitle = {{IEEE/CVF} Conference on Computer Vision and Pattern Recognition Workshops,
{CVPR} Workshops 2023},
publisher = {{IEEE}},
year = {2023},
}
Poster: Insite Pipeline - A Pipeline Enabling In-Transit Processing for Arbor, NEST and TVB

Simulation of neuronal networks has steadily advanced and now allows for larger and more complex models. However, scaling simulations to such sizes comes with issues and challenges.Especially the amount of data produced, as well as the runtime of the simulation, can be limiting.Often, storing all data on disk is impossible, and users might have to wait for a long time until they can process the data.A standard solution in simulation science is to use in-transit approaches.In-transit implementations allow users to access data while the simulation is still running and do parallel processing outside the simulation.This allows for early insights into the results, early stopping of simulations that are not promising, or even steering of the simulations.Existing in-transit solutions, however, are often complex to integrate into the workflow as they rely on integration into simulators and often use data formats that are complex to handle.This is especially constraining in the context of multi-disciplinary research conducted in the HBP, as such an important feature should be accessible to all users.
To remedy this, we developed Insite, a pipeline that allows easy in-transit access to simulation data of multiscale simulations conducted with TVB, NEST, and Arbor.
@misc{kruger_marcel_2023_7849225,
author = {Krüger, Marcel and
Gerrits, Tim and
Kuhlen, Torsten and
Weyers, Benjamin},
title = {{Insite Pipeline - A Pipeline Enabling In-Transit
Processing for Arbor, NEST and TVB}},
month = mar,
year = 2023,
publisher = {Zenodo},
doi = {10.5281/zenodo.7849225},
url = {https://doi.org/10.5281/zenodo.7849225}
}
Greedy Image Approximation for Artwork Generation via Contiguous Bézier Segments
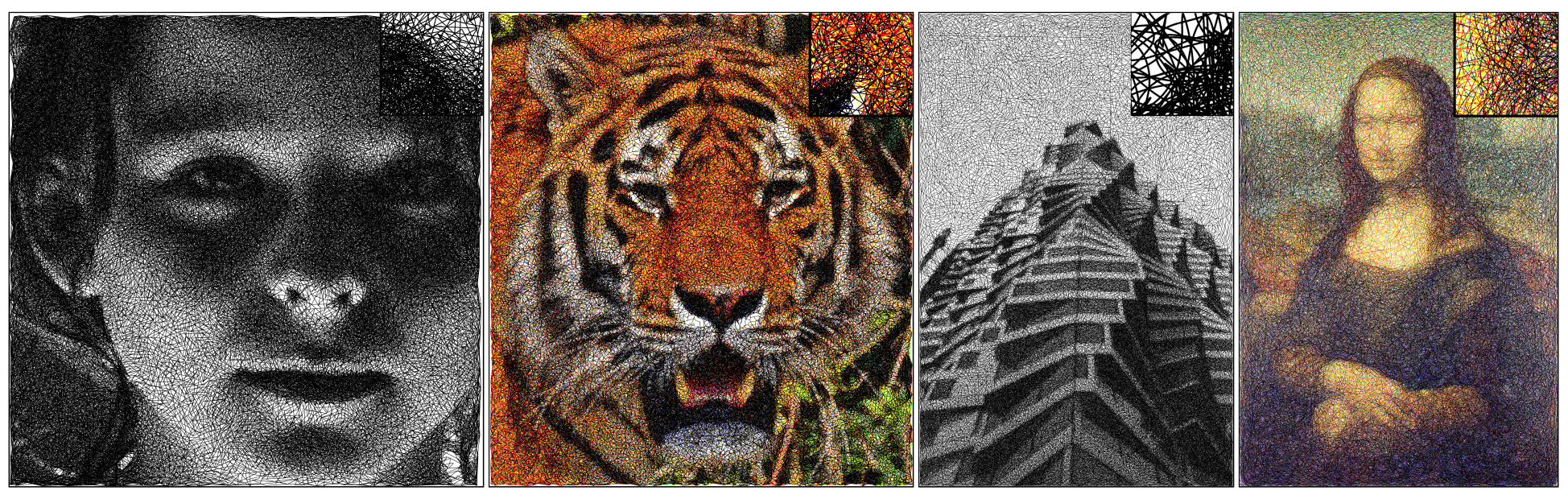
The automatic creation of digital art has a long history in computer graphics. In this work, we focus on approximating input images to mimic artwork by the artist Kumi Yamashita, as well as the popular scribble art style. Both have in common that the artists create the works by using a single, contiguous thread (Yamashita) or stroke (scribble) that is placed seemingly at random when viewed at close range, but perceived as a tone-mapped picture when viewed from a distance. Our approach takes a rasterized image as input and creates a single, connected path by iteratively sampling a set of candidate segments that extend the current path and greedily selecting the best one. The candidates are sampled according to art style specific constraints, i.e. conforming to continuity constraints in the mathematical sense for the scribble art style. To model the perceptual discrepancy between close and far viewing distances, we minimize the difference between the input image and the image created by rasterizing our path after applying the contrast sensitivity function, which models how human vision blurs images when viewed from a distance. Our approach generalizes to colored images by using one path per color. We evaluate our approach on a wide range of input images and show that it is able to achieve good results for both art styles in grayscale and color.
@inproceedings{nehringwirxel2023greedy,
title={Greedy Image Approximation for Artwork Generation via Contiguous B{\'{e}}zier Segments},
author={Nehring-Wirxel, Julius and Lim, Isaak and Kobbelt, Leif},
booktitle={28th International Symposium on Vision, Modeling, and Visualization, VMV 2023},
year={2023}
}
Point2Vec for Self-Supervised Representation Learning on Point Clouds
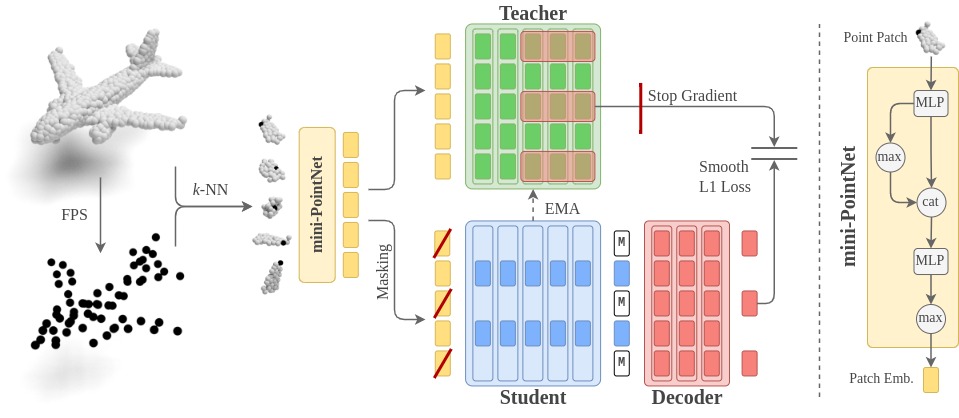
Recently, the self-supervised learning framework data2vec has shown inspiring performance for various modalities using a masked student-teacher approach. However, it remains open whether such a framework generalizes to the unique challenges of 3D point clouds.To answer this question, we extend data2vec to the point cloud domain and report encouraging results on several downstream tasks. In an in-depth analysis, we discover that the leakage of positional information reveals the overall object shape to the student even under heavy masking and thus hampers data2vec to learn strong representations for point clouds. We address this 3D-specific shortcoming by proposing point2vec, which unleashes the full potential of data2vec-like pre-training on point clouds. Our experiments show that point2vec outperforms other self-supervised methods on shape classification and few-shot learning on ModelNet40 and ScanObjectNN, while achieving competitive results on part segmentation on ShapeNetParts. These results suggest that the learned representations are strong and transferable, highlighting point2vec as a promising direction for self-supervised learning of point cloud representations.
@article{abouzeid2023point2vec,
title={Point2Vec for Self-Supervised Representation Learning on Point Clouds},
author={Abou Zeid, Karim and Schult, Jonas and Hermans, Alexander and Leibe, Bastian},
journal={DAGM German Conference on Pattern Recognition (GCPR)},
year={2023},
}
Clicks as Queries: Interactive Transformer for Multi-instance Segmentation
Transformers have percolated into a multitude of computer vision domains including dense prediction tasks such as instance segmentation and have demonstrated strong performances. Existing transformer based segmentation approaches such as Mask2Former generate pixel-precise object masks automatically given an input image. While these methods are capable of generating high quality masks in general, they have an inherent class bias and are unable to incorporate user inputs to either segment out-of-distribution classes or to correct bad predictions. Hence, we introduce a novel module called Interactive Transformer that enables transformers to predict and refine objects based on user interactions. Subsequently, we use our Interactive Transformer to develop an interactive segmentation network that can generate mask predictions based on user clicks and thereby widen the transformer application domains within computer vision. In addition, the Interactive Transformer can make such interactive segmentation tasks more efficient by (i) imparting the ability to perform multi-instances segmentation, (ii) alleviating the need to re-compute image-level backbone features as done in existing interactive segmentation networks, and (iii) reducing the required number of user interactions by modeling a common background representation. Our transformer-based architecture outperforms the state-of-the-art interactive segmentation networks on multiple benchmark datasets.
@inproceedings{RanaMahadevan23cvprw,
title={Clicks as Queries: Interactive Transformer for Multi-instance Segmentation},
author={Rana, Amit and Mahadevan, Sabarinath and Alexander Hermans and Leibe, Bastian},
booktitle={CVPRW},
year={2023}
}
UGainS: Uncertainty Guided Anomaly Segmentation

A single unexpected object on the road can cause an accident or may lead to injuries. To prevent this, we need a reliable mechanism for finding anomalous objects on the road. This task, called anomaly segmentation, can be a stepping stone to safe and reliable autonomous driving. Current approaches tackle anomaly segmentation by assigning an anomaly score to each pixel and by grouping anomalous regions using simple heuristics. However, pixel grouping is a limiting factor when it comes to evaluating the segmentation performance of individual anomalous objects. To address the issue of grouping multiple anomaly instances into one, we propose an approach that produces accurate anomaly instance masks. Our approach centers on an out-of-distribution segmentation model for identifying uncertain regions and a strong generalist segmentation model for anomaly instances segmentation. We investigate ways to use uncertain regions to guide such a segmentation model to perform segmentation of anomalous instances. By incorporating strong object priors from a generalist model we additionally improve the per-pixel anomaly segmentation performance. Our approach outperforms current pixel-level anomaly segmentation methods, achieving an AP of 80.08% and 88.98% on the Fishyscapes Lost and Found and the RoadAnomaly validation sets respectively.
```
@inproceedings{nekrasov2023ugains,
title = {{UGainS: Uncertainty Guided Anomaly Instance Segmentation}},
author = {Nekrasov, Alexey and Hermans, Alexander and Kuhnert, Lars and Leibe, Bastian},
booktitle = {GCPR},
year = {2023}
}
```
Modeling the Droplet Impact on the Substrate with Surface Preparation in Thermal Spraying with SPH
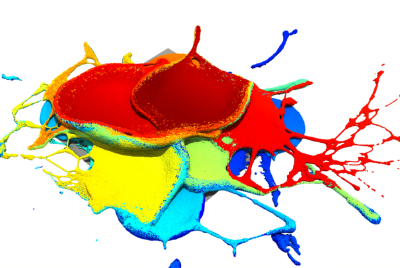
The properties of thermally sprayed coatings depend heavily on their microstructure. The microstructure is determined by the dynamics of the impact of the droplets on the substrate surface and the subsequent overlapping of the previously solidified and deformed droplets. Substrate preparation prior to spraying ensures strong adhesion of the coating. This includes roughening and preheating of the substrate surface. In the present study, the smoothed particle hydrodynamics (SPH) method is used to model the Al2O3 impact on a preheated substrate and a roughened substrate surface. A semi-implicit enthalpy–porosity method is applied to simulate the solidification process in the mushy zone. In addition, an implicit correction for SPH simulations is used to improve the performance and stability of the simulation. To investigate the dynamics of heat transfer in the contact between the surface and the droplet, the discretization of the substrate is also taken into account. The results show that the studied substrate surface conditions affect the splat morphology and the solidification process. Subsequently, the simulation of multiple droplets for coating formation is also performed and analyzed.
@Article{BHJ+23,
author = {Kirsten Bobzin and Hendrik Heinemann and Kevin Jasutyn and Stefan Rhys Jeske and Jan Bender and Sergej Warkentin and Oleg Mokrov and Rahul Sharma and Uwe Reisgen},
journal = {Journal of Thermal Spray Technology},
title = {Modeling the Droplet Impact on the Substrate with Surface Preparation in Thermal Spraying with SPH},
year = {2023},
month = {jan},
doi = {10.1007/s11666-023-01534-0},
}
4D-StOP: Panoptic Segmentation of 4D LiDAR using Spatio-temporal Object Proposal Generation and Aggregation
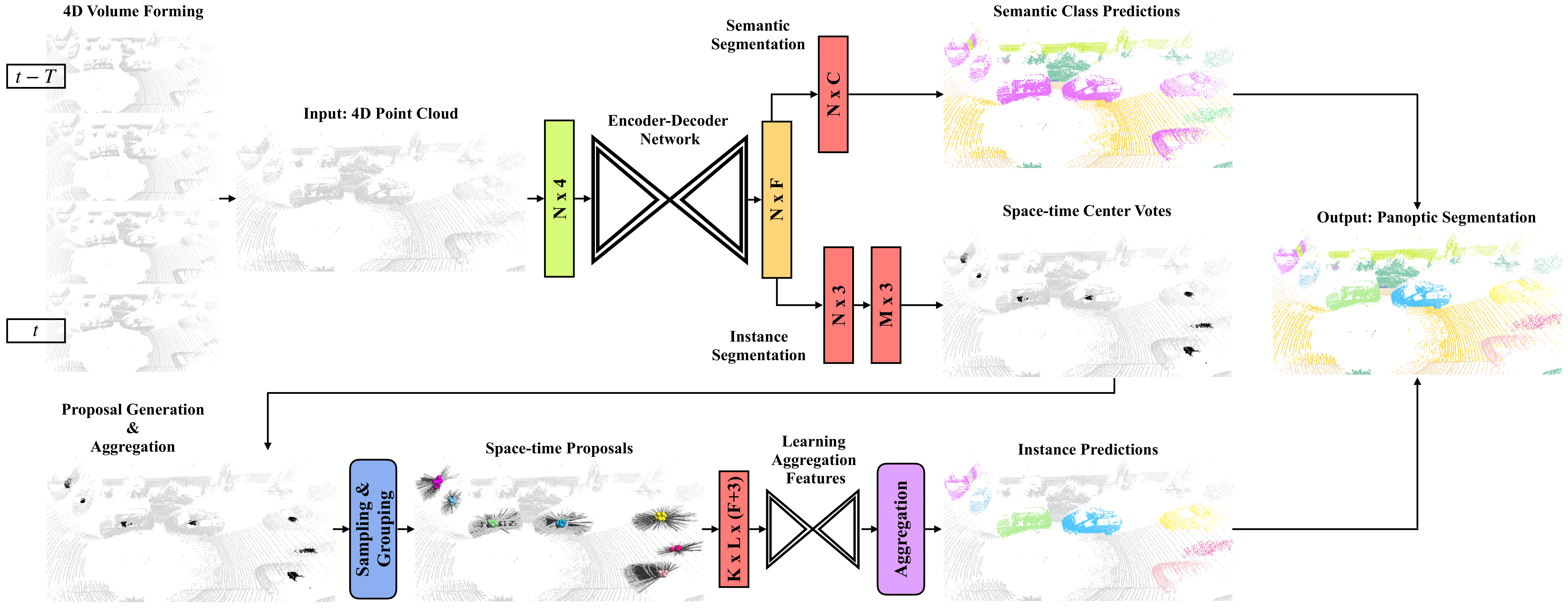
In this work, we present a new paradigm, called 4D-StOP, to tackle the task of 4D Panoptic LiDAR Segmentation. 4D-StOP first generates spatio-temporal proposals using voting-based center predictions, where each point in the 4D volume votes for a corresponding center. These tracklet proposals are further aggregated using learned geometric features. The tracklet aggregation method effectively generates a video-level 4D scene representation over the entire space-time volume. This is in contrast to existing end-to-end trainable state-of-the-art approaches which use spatio-temporal embeddings that are represented by Gaussian probability distributions. Our voting-based tracklet generation method followed by geometric feature-based aggregation generates significantly improved panoptic LiDAR segmentation quality when compared to modeling the entire 4D volume using Gaussian probability distributions. 4D-StOP achieves a new state-of-the-art when applied to the SemanticKITTI test dataset with a score of 63.9 LSTQ, which is a large (+7%) improvement compared to current best-performing end-to-end trainable methods. The code and pre-trained models are available at:https://github.com/LarsKreuzberg/4D-StOP
EMBER: Exact Mesh Booleans via Efficient & Robust Local Arrangements
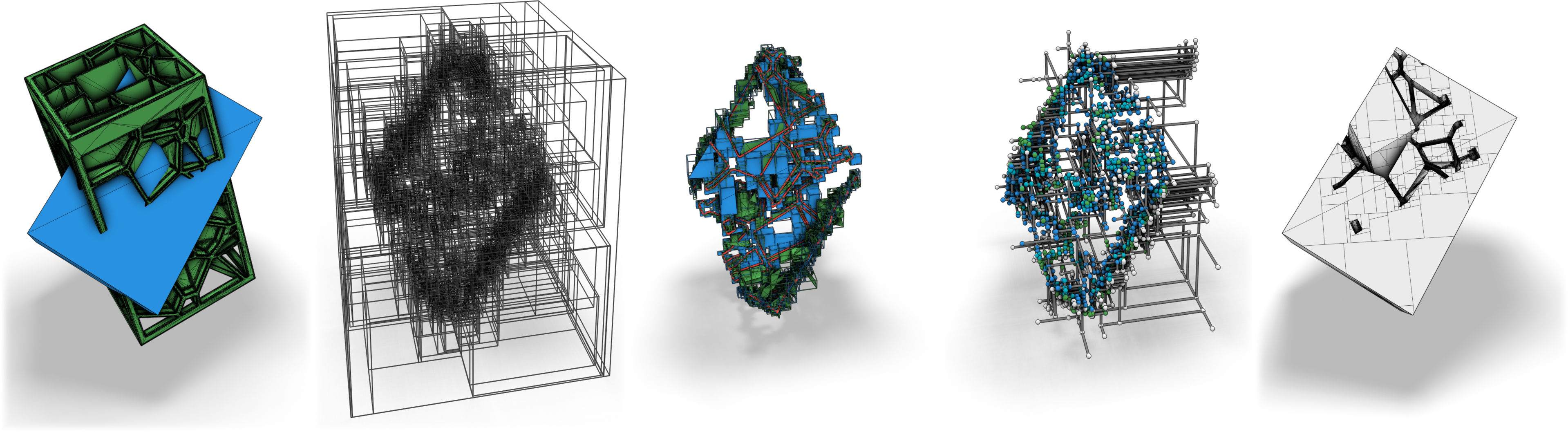
Boolean operators are an essential tool in a wide range of geometry processing and CAD/CAM tasks. We present a novel method, EMBER, to compute Boolean operations on polygon meshes which is exact, reliable, and highly performant at the same time. Exactness is guaranteed by using a plane-based representation for the input meshes along with recently introduced homogeneous integer coordinates. Reliability and robustness emerge from a formulation of the algorithm via generalized winding numbers and mesh arrangements. High performance is achieved by avoiding the (pre-)construction of a global acceleration structure. Instead, our algorithm performs an adaptive recursive subdivision of the scene’s bounding box while generating and tracking all required data on the fly. By leveraging a number of early-out termination criteria, we can avoid the generation and inspection of regions that do not contribute to the output. With a careful implementation and a work-stealing multi-threading architecture, we are able to compute Boolean operations between meshes with millions of triangles at interactive rates. We run an extensive evaluation on the Thingi10K dataset to demonstrate that our method outperforms state-of-the-art algorithms, even inexact ones like QuickCSG, by orders of magnitude.
If you are interested in a binary implementation including various additional features, please contact the authors. Contact: trettner@shapedcode.com
HODOR: High-level Object Descriptors for Object Re-segmentation in Video Learned from Static Images
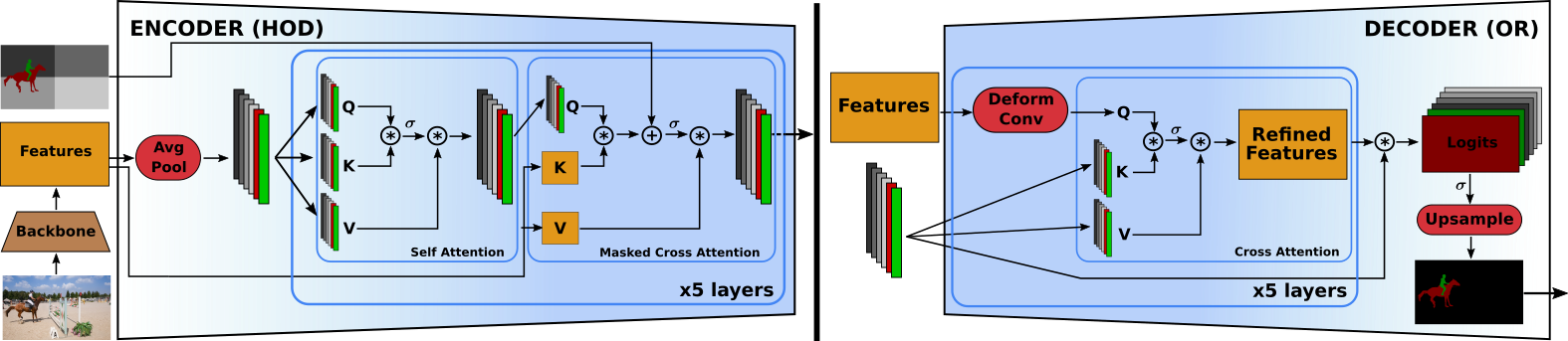
Existing state-of-the-art methods for Video Object Segmentation (VOS) learn low-level pixel-to-pixel correspondences between frames to propagate object masks across video. This requires a large amount of densely annotated video data, which is costly to annotate, and largely redundant since frames within a video are highly correlated. In light of this, we propose HODOR: a novel method that tackles VOS by effectively leveraging annotated static images for understanding object appearance and scene context. We encode object instances and scene information from an image frame into robust high-level descriptors which can then be used to re-segment those objects in different frames. As a result, HODOR achieves state-of-the-art performance on the DAVIS and YouTube-VOS benchmarks compared to existing methods trained without video annotations. Without any architectural modification, HODOR can also learn from video context around single annotated video frames by utilizing cyclic consistency, whereas other methods rely on dense, temporally consistent annotations.
@article{Athar22CVPR,
title = {{HODOR: High-level Object Descriptors for Object Re-segmentation in Video Learned from Static Images}},
author = {Athar, Ali and Luiten, Jonathon and Hermans, Alexander and Ramanan, Deva and Leibe, Bastian},
journal = {{IEEE Conference on Computer Vision and Pattern Recognition (CVPR'22)}},
year = {2022}
}
Opening up Open World Tracking
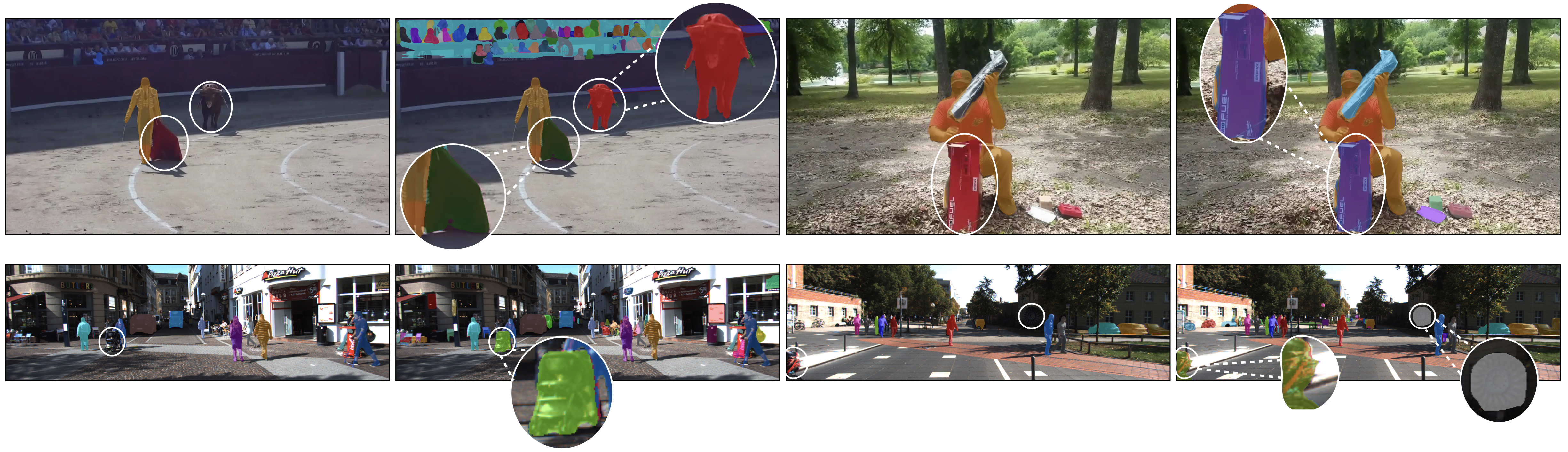
Tracking and detecting any object, including ones never-seen-before during model training, is a crucial but elusive capability of autonomous systems. An autonomous agent that is blind to never-seen-before objects poses a safety hazard when operating in the real world and yet this is how almost all current systems work. One of the main obstacles towards advancing tracking any object is that this task is notoriously difficult to evaluate. A benchmark that would allow us to perform an apples-to-apples comparison of existing efforts is a crucial first step towards advancing this important research field. This paper addresses this evaluation deficit and lays out the landscape and evaluation methodology for detecting and tracking both known and unknown objects in the open-world setting. We propose a new benchmark, TAO-OW: Tracking Any Object in an Open World}, analyze existing efforts in multi-object tracking, and construct a baseline for this task while highlighting future challenges. We hope to open a new front in multi-object tracking research that will hopefully bring us a step closer to intelligent systems that can operate safely in the real world.
@inproceedings{liu2022opening,
title={Opening up Open-World Tracking},
author={Liu, Yang and Zulfikar, Idil Esen and Luiten, Jonathon and Dave, Achal and Ramanan, Deva and Leibe, Bastian and O{\v{s}}ep, Aljo{\v{s}}a and Leal-Taix{\'e}, Laura},
journal={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
year={2022}
}
Fast Octree Neighborhood Search for SPH Simulations
We present a new octree-based neighborhood search method for SPH simulation. A speedup of up to 1.9x is observed in comparison to state-of-the-art methods which rely on uniform grids. While our method focuses on maximizing performance in fixed-radius SPH simulations, we show that it can also be used in scenarios where the particle support radius is not constant thanks to the adaptive nature of the octree acceleration structure.
Neighborhood search methods typically consist of an acceleration structure that prunes the space of possible particle neighbor pairs, followed by direct distance comparisons between the remaining particle pairs. Previous works have focused on minimizing the number of comparisons. However, in an effort to minimize the actual computation time, we find that distance comparisons exhibit very high throughput on modern CPUs. By permitting more comparisons than strictly necessary, the time spent on preparing and searching the acceleration structure can be reduced, yielding a net positive speedup. The choice of an octree acceleration structure, instead of the uniform grid typically used in fixed-radius methods, ensures balanced computational tasks. This benefits both parallelism and provides consistently high computational intensity for the distance comparisons. We present a detailed account of high-level considerations that, together with low-level decisions, enable high throughput for performance-critical parts of the algorithm.
Finally, we demonstrate the high performance of our algorithm on a number of large-scale fixed-radius SPH benchmarks and show in experiments with a support radius ratio up to 3 that our method is also effective in multi-resolution SPH simulations.
@ARTICLE{ FWL+22,
author= {Jos{\'{e}} Antonio Fern{\'{a}}ndez-Fern{\'{a}}ndez and Lukas Westhofen and Fabian L{\"{o}}schner and Stefan Rhys Jeske and Andreas Longva and Jan Bender },
title= {{Fast Octree Neighborhood Search for SPH Simulations}},
year= {2022},
journal= {ACM Transactions on Graphics (SIGGRAPH Asia)},
publisher= {ACM},
volume = {41},
number = {6},
pages= {13}
}
Scan2FEM: From Point Clouds to Structured 3D Models Suitable for Simulation

Preservation of cultural heritage is important to prevent singular objects or sites of cultural importance to decay. One aspect of preservation is the creation of a digital twin. In case of a catastrophic event, this twin can be used to support repairs or reconstruction, in order to stay faithful to the original object or site. Certain activities in prolongation of such an objects lifetime may involve adding or replacing structural support elements to prevent a collapse. We propose an automatic method that is capable of transforming a point cloud into a geometric representation that is suitable for structural analysis. We robustly find cuboids and their connections in a point cloud to approximate the wooden beam structure contained inside. We export the necessary information to perform structural analysis, on the example of the timber attic of the UNESCO World Heritage Aachen Cathedral. We provide evaluation of the resulting cuboids’ quality and show how a user can interactively refine the cuboids in order to improve the approximated model, and consequently the simulation results.
@inproceedings {10.2312:gch.20221215,
booktitle = {Eurographics Workshop on Graphics and Cultural Heritage},
editor = {Ponchio, Federico and Pintus, Ruggero},
title = {{Scan2FEM: From Point Clouds to Structured 3D Models Suitable for Simulation}},
author = {Selman, Zain and Musto, Juan and Kobbelt, Leif},
year = {2022},
publisher = {The Eurographics Association},
ISSN = {2312-6124},
ISBN = {978-3-03868-178-6},
DOI = {10.2312/gch.20221215}
}
TinyAD: Automatic Differentiation in Geometry Processing Made Simple
Non-linear optimization is essential to many areas of geometry processing research. However, when experimenting with different problem formulations or when prototyping new algorithms, a major practical obstacle is the need to figure out derivatives of objective functions, especially when second-order derivatives are required. Deriving and manually implementing gradients and Hessians is both time-consuming and error-prone. Automatic differentiation techniques address this problem, but can introduce a diverse set of obstacles themselves, e.g. limiting the set of supported language features, imposing restrictions on a program's control flow, incurring a significant run time overhead, or making it hard to exploit sparsity patterns common in geometry processing. We show that for many geometric problems, in particular on meshes, the simplest form of forward-mode automatic differentiation is not only the most flexible, but also actually the most efficient choice. We introduce TinyAD: a lightweight C++ library that automatically computes gradients and Hessians, in particular of sparse problems, by differentiating small (tiny) sub-problems. Its simplicity enables easy integration; no restrictions on, e.g., looping and branching are imposed. TinyAD provides the basic ingredients to quickly implement first and second order Newton-style solvers, allowing for flexible adjustment of both problem formulations and solver details. By showcasing compact implementations of methods from parametrization, deformation, and direction field design, we demonstrate how TinyAD lowers the barrier to exploring non-linear optimization techniques. This enables not only fast prototyping of new research ideas, but also improves replicability of existing algorithms in geometry processing. TinyAD is available to the community as an open source library.
- Best Paper Award (1st place) at SGP 2022
- Graphics Replicability Stamp
@article{schmidt2022tinyad,
title={{TinyAD}: Automatic Differentiation in Geometry Processing Made Simple},
author={Schmidt, Patrick and Born, Janis and Bommes, David and Campen, Marcel and Kobbelt, Leif},
year={2022},
journal={Computer Graphics Forum},
volume={41},
number={5},
}
A Survey on SPH Methods in Computer Graphics
Throughout the past decades, the graphics community has spent major resources on the research and development of physics simulators on the mission to computer-generate behaviors achieving outstanding visual effects or to make the virtual world indistinguishable from reality. The variety and impact of recent research based on Smoothed Particle Hydrodynamics (SPH) demonstrates the concept's importance as one of the most versatile tools for the simulation of fluids and solids. With this survey, we offer an overview of the developments and still-active research on physics simulation methodologies based on SPH that has not been addressed in previous SPH surveys. Following an introduction about typical SPH discretization techniques, we provide an overview over the most used incompressibility solvers and present novel insights regarding their relation and conditional equivalence. The survey further covers recent advances in implicit and particle-based boundary handling and sampling techniques. While SPH is best known in the context of fluid simulation we discuss modern concepts to augment the range of simulatable physical characteristics including turbulence, highly viscous matter, deformable solids, as well as rigid body contact handling. Besides the purely numerical approaches, simulation techniques aided by machine learning are on the rise. Thus, the survey discusses recent data-driven approaches and the impact of differentiable solvers on artist control. Finally, we provide context for discussion by outlining existing problems and opportunities to open up new research directions.
@article {KBST2022,
journal = {Computer Graphics Forum},
title = {{A Survey on SPH Methods in Computer Graphics}},
author = {Koschier, Dan and Bender, Jan and Solenthaler, Barbara and Teschner, Matthias},
year = {2022},
volume ={41},
number = {2},
publisher = {The Eurographics Association and John Wiley & Sons Ltd.},
ISSN = {1467-8659},
DOI = {10.1111/cgf.14508}
}
Gazebo Fluids: SPH-based simulation of fluid interaction with articulated rigid body dynamics
Physical simulation is an indispensable component of robotics simulation platforms that serves as the basis for a plethora of research directions. Looking strictly at robotics, the common characteristic of the most popular physics engines, such as ODE, DART, MuJoCo, bullet, SimBody, PhysX or RaiSim, is that they focus on the solution of articulated rigid bodies with collisions and contacts problems, while paying less attention to other physical phenomena. This restriction limits the range of addressable simulation problems, rendering applications such as soft robotics, cloth simulation, simulation of viscoelastic materials, and fluid dynamics, especially surface swimming, infeasible. In this work, we present Gazebo Fluids, an open-source extension of the popular Gazebo robotics simulator that enables the interaction of articulated rigid body dynamics with particle-based fluid and deformable solid simulation. We implement fluid dynamics and highly viscous and elastic material simulation capabilities based on the Smoothed Particle Hydrodynamics method. We demonstrate the practical impact of this extension for previously infeasible application scenarios in a series of experiments, showcasing one of the first self-propelled robot swimming simulations with SPH in a robotics simulator.
@InProceedings{ABA22,
author = {Emmanouil Angelidis and Jan Bender and Jonathan Arreguit and Lars Gleim and Wei Wang and Cristian Axenie and Alois Knoll and Auke Ijspeert},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title = {Gazebo Fluids: SPH-based simulation of fluid interaction with articulated rigid body dynamics},
organization={IEEE},
year = {2022}
}
Insite: A Pipeline Enabling In-Transit Visualization and Analysis for Neuronal Network Simulations
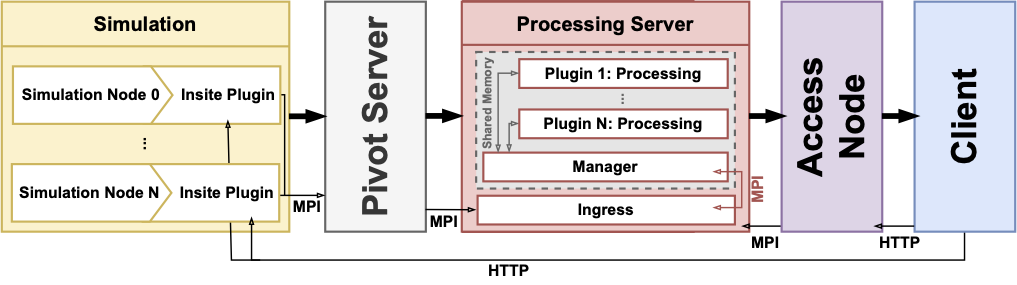
Neuronal network simulators are central to computational neuroscience, enabling the study of the nervous system through in-silico experiments. Through the utilization of high-performance computing resources, these simulators are capable of simulating increasingly complex and large networks of neurons today. Yet, the increased capabilities introduce a challenge to the analysis and visualization of the simulation results. In this work, we propose a pipeline for in-transit analysis and visualization of data produced by neuronal network simulators. The pipeline is able to couple with simulators, enabling querying, filtering, and merging data from multiple simulation instances. Additionally, the architecture allows user-defined plugins that perform analysis tasks in the pipeline. The pipeline applies traditional REST API paradigms and utilizes data formats such as JSON to provide easy access to the generated data for visualization and further processing. We present and assess the proposed architecture in the context of neuronal network simulations generated by the NEST simulator.
@InProceedings{10.1007/978-3-031-23220-6_20,
author="Kr{\"u}ger, Marcel and Oehrl, Simon and Demiralp, Ali C. and Spreizer, Sebastian and Bruchertseifer, Jens and Kuhlen, Torsten W. and Gerrits, Tim and Weyers, Benjamin",
editor="Anzt, Hartwig and Bienz, Amanda and Luszczek, Piotr and Baboulin, Marc",
title="Insite: A Pipeline Enabling In-Transit Visualization and Analysis for Neuronal Network Simulations",
booktitle="High Performance Computing. ISC High Performance 2022 International Workshops",
year="2022",
publisher="Springer International Publishing",
address="Cham",
pages="295--305",
isbn="978-3-031-23220-6"
}
Performance Assessment of Diffusive Load Balancing for Distributed Particle Advection
Particle advection is the approach for the extraction of integral curves from vector fields. Efficient parallelization of particle advection is a challenging task due to the problem of load imbalance, in which processes are assigned unequal workloads, causing some of them to idle as the others are performing computing. Various approaches to load balancing exist, yet they all involve trade-offs such as increased inter-process communication, or the need for central control structures. In this work, we present two local load balancing methods for particle advection based on the family of diffusive load balancing. Each process has access to the blocks of its neighboring processes, which enables dynamic sharing of the particles based on a metric defined by the workload of the neighborhood. The approaches are assessed in terms of strong and weak scaling as well as load imbalance. We show that the methods reduce the total run-time of advection and are promising with regard to scaling as they operate locally on isolated process neighborhoods.
Pseudodynamic analysis of heart tube formation in the mouse reveals strong regional variability and early left–right asymmetry
Understanding organ morphogenesis requires a precise geometrical description of the tissues involved in the process. The high morphological variability in mammalian embryos hinders the quantitative analysis of organogenesis. In particular, the study of early heart development in mammals remains a challenging problem due to imaging limitations and complexity. Here, we provide a complete morphological description of mammalian heart tube formation based on detailed imaging of a temporally dense collection of mouse embryonic hearts. We develop strategies for morphometric staging and quantification of local morphological variations between specimens. We identify hot spots of regionalized variability and identify Nodal-controlled left–right asymmetry of the inflow tracts as the earliest signs of organ left–right asymmetry in the mammalian embryo. Finally, we generate a three-dimensional+t digital model that allows co-representation of data from different sources and provides a framework for the computer modeling of heart tube formation.
@article{esteban2022pseudodynamic,
author = {Esteban, Isaac and Schmidt, Patrick and Desgrange, Audrey and Raiola, Morena and Temi{\~n}o, Susana and Meilhac, Sigol\`{e}ne M. and Kobbelt, Leif and Torres, Miguel},
title = {Pseudo-dynamic analysis of heart tube formation in the mouse reveals strong regional variability and early left-right asymmetry},
year = {2022},
journal = {Nature Cardiovascular Research},
volume = 1,
number = 5
}
Astray: A Performance-Portable Geodesic Ray Tracer

Geodesic ray tracing is the numerical method to compute the motion of matter and radiation in spacetime. It enables visualization of the geometry of spacetime and is an important tool to study the gravitational fields in the presence of astrophysical phenomena such as black holes. Although the method is largely established, solving the geodesic equation remains a computationally demanding task. In this work, we present Astray; a high-performance geodesic ray tracing library capable of running on a single or a cluster of computers equipped with compute or graphics processing units. The library is able to visualize any spacetime given its metric tensor and contains optimized implementations of a wide range of spacetimes, including commonly studied ones such as Schwarzschild and Kerr. The performance of the library is evaluated on standard consumer hardware as well as a compute cluster through strong and weak scaling benchmarks. The results indicate that the system is capable of reaching interactive frame rates with increasing use of high-performance computing resources. We further introduce a user interface capable of remote rendering on a cluster for interactive visualization of spacetimes.
@inproceedings {10.2312:vmv.20221208,
booktitle = {Vision, Modeling, and Visualization},
editor = {Bender, Jan and Botsch, Mario and Keim, Daniel A.},
title = {{Astray: A Performance-Portable Geodesic Ray Tracer}},
author = {Demiralp, Ali Can and Krüger, Marcel and Chao, Chu and Kuhlen, Torsten W. and Gerrits, Tim},
year = {2022},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-189-2},
DOI = {10.2312/vmv.20221208}
}
Studying the Effect of Tissue Properties on Radiofrequency Ablation by Visual Simulation Ensemble Analysis
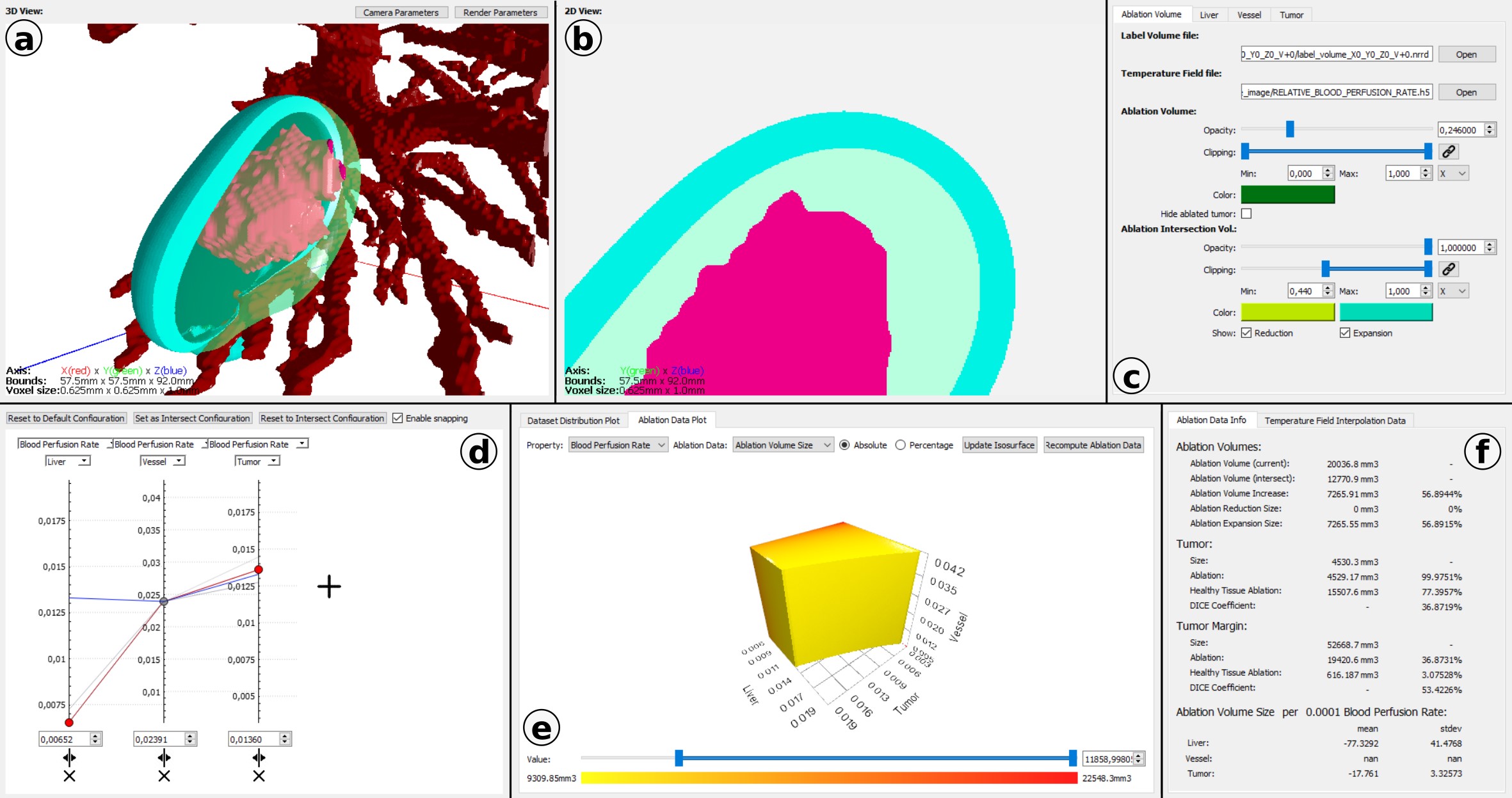
Radiofrequency ablation is a minimally invasive, needle-based medical treatment to ablate tumors by heating due to absorption of radiofrequency electromagnetic waves. To ensure the complete target volume is destroyed, radiofrequency ablation simulations are required for treatment planning. However, the choice of tissue properties used as parameters during simulation induce a high uncertainty, as the tissue properties are strongly patient-dependent. To capture this uncertainty, a simulation ensemble can be created. Understanding the dependency of the simulation outcome on the input parameters helps to create improved simulation ensembles by focusing on the main sources of uncertainty and, thus, reducing computation costs. We present an interactive visual analysis tool for radiofrequency ablation simulation ensembles to target this objective. Spatial 2D and 3D visualizations allow for the comparison of ablation results of individual simulation runs and for the quantification of differences. Simulation runs can be interactively selected based on a parallel coordinates visualization of the parameter space. A 3D parameter space visualization allows for the analysis of the ablation outcome when altering a selected tissue property for the three tissue types involved in the ablation process. We discuss our approach with domain experts working on the development of new simulation models and demonstrate the usefulness of our approach for analyzing the influence of different tissue properties on radiofrequency ablations.
Honorable Mention Award!@inproceedings {10.2312:vcbm.20221187,
booktitle = {Eurographics Workshop on Visual Computing for Biology and Medicine},
editor = {Renata G. Raidou and Björn Sommer and Torsten W. Kuhlen and Michael Krone and Thomas Schultz and Hsiang-Yun Wu},
title = {{Studying the Effect of Tissue Properties on Radiofrequency Ablation by Visual Simulation Ensemble Analysis}},
author = {Heimes, Karl and Evers, Marina and Gerrits, Tim and Gyawali, Sandeep and Sinden, David and Preusser, Tobias and Linsen, Lars},
year = {2022},
publisher = {The Eurographics Association},
ISSN = {2070-5786},
ISBN = {978-3-03868-177-9},
DOI = {10.2312/vcbm.20221187}
}
Multifaceted Visual Analysis of Oceanographic Simulation Ensemble Data
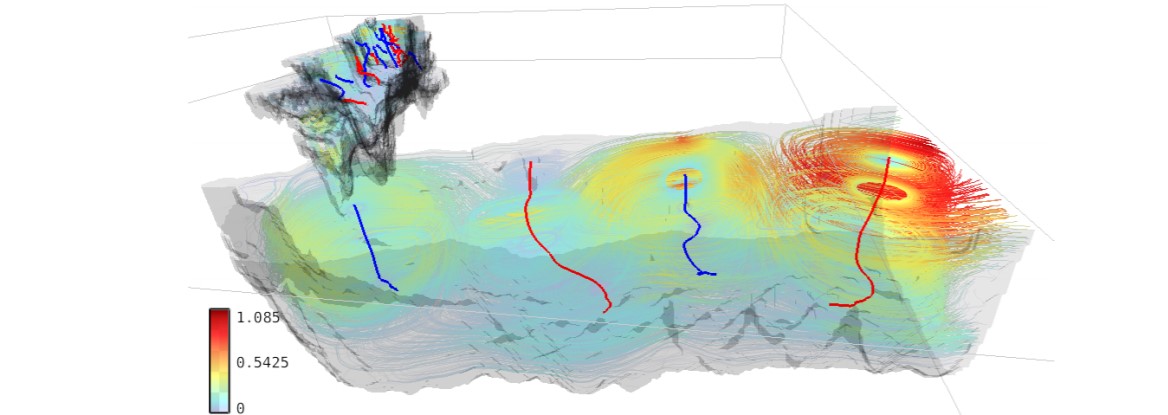
The analysis of multirun oceanographic simulation data imposes various challenges ranging from visualizing multifield spatio-temporal data over properly identifying and depicting vortices to visually representing uncertainties. We present an integrated interactive visual analysis tool that enables us to overcome these challenges by employing multiple coordinated views of different facets of the data at different levels of aggregation.
@ARTICLE {9495240,
author = {H. Rave and J. Fincke and S. Averkamp and B. Tangerding and L. P. Wehrenberg and T. Gerrits and K. Huesmann and S. Leistikow and L. Linsen},
journal = {IEEE Computer Graphics and Applications},
title = {Multifaceted Visual Analysis of Oceanographic Simulation Ensemble Data},
year = {2022},
volume = {42},
number = {04},
issn = {1558-1756},
pages = {80-88},
abstract = {The analysis of multirun oceanographic simulation data imposes various challenges ranging from visualizing multifield spatio-temporal data over properly identifying and depicting vortices to visually representing uncertainties. We present an integrated interactive visual analysis tool that enables us to overcome these challenges by employing multiple coordinated views of different facets of the data at different levels of aggregation.}
keywords = {visualization;data visualization;data models;uncertainty;salinity (geophysical);correlation;rendering (computer graphics)},
doi = {10.1109/MCG.2021.3098096},
publisher = {IEEE Computer Society},
address = {Los Alamitos, CA, USA},
month = {jul}
}
Verbal Interactions with Embodied Conversational Agents
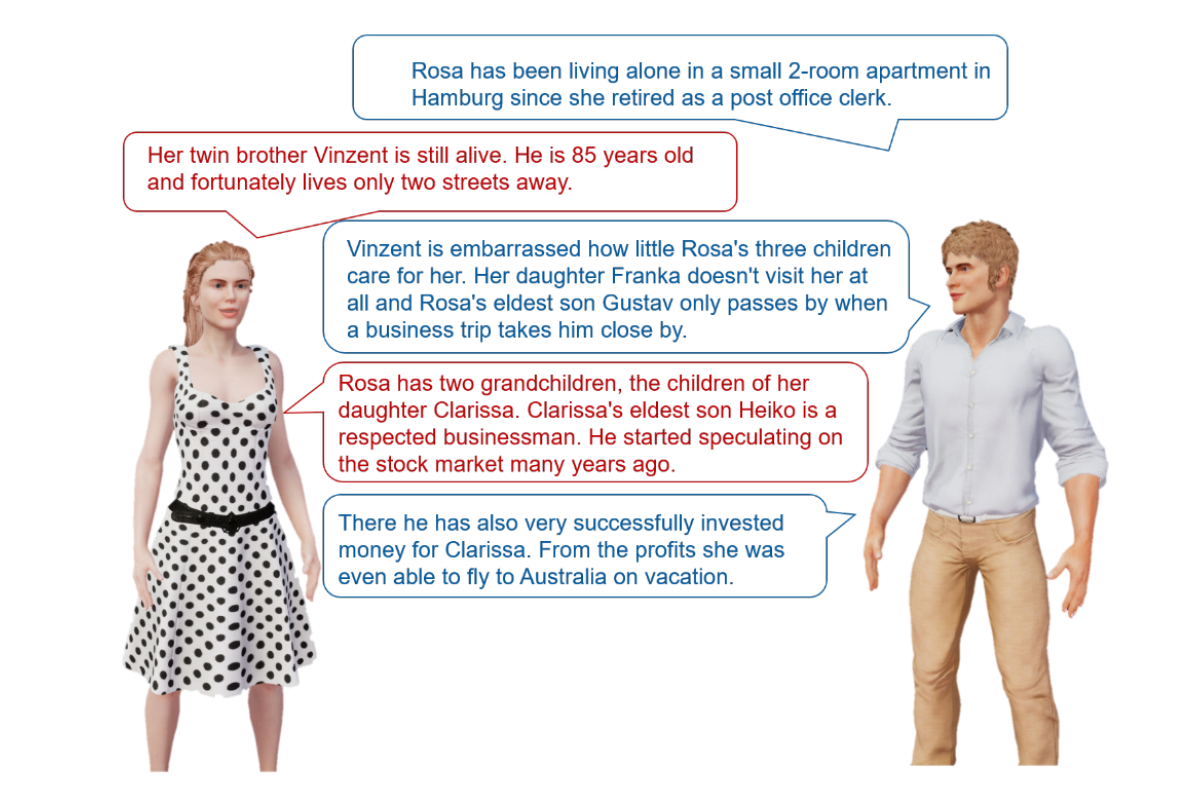
Embedding virtual humans into virtual reality (VR) applications can fulfill diverse needs. These, so-called, embodied conversational agents (ECAs) can simply enliven the virtual environments, act for example as training partners, tutors, or therapists, or serve as advanced (emotional) user interfaces to control immersive systems. The latter case is of special interest since we as human users are specifically good at interpreting other humans. ECAs can enhance their verbal communication with non-verbal behavior and thereby make communication more efficient. For example, backchannels, like nodding or signaling not understanding, can be used to give feedback while a user is speaking. Furthermore, gestures, gaze, posture, proxemics, and many more non-verbal behaviors can be applied. Additionally, turn-taking can be streamlined when the ECA understands when to take over the turn and signals willingness to yield it once done. While many of these aspects are already under investigation from very different disciplines, operationalizing those into versatile, virtually embodied human-computer interfaces remains an open challenge.
To this end, I conducted several studies investigating acoustical effects of ECAs' speech, both with regard to the auralization in the virtual environment and the speech signals used. Furthermore, I want to find guidelines for expressing both turn-taking and various backchannels that make interactions with such advanced embodied interfaces more efficient and pleasant, both when the ECA is speaking and during listening. Additionally, measuring social presence (i.e., the feeling of being there and interacting with a ``real'' person) is an important instrument for this kind of research, since I want to facilitate exactly those subconscious processes of understanding other humans, which we as humans are particularly good at. Therefore, I want to investigate objective measures for social presence.
@inproceedings{Ehret2022a,
author = {Ehret, Jonathan},
booktitle = {Doctoral Consortium at the 22nd ACM International Conference on
Intelligent Virtual Agents},
title = {{Doctoral Consortium : Verbal Interactions with Embodied
Conversational Agents}},
year = {2022}
}
Augmented Reality-Based Surgery on the Human Cadaver Using a New Generation of Optical Head-Mounted Displays: Development and Feasibility Study
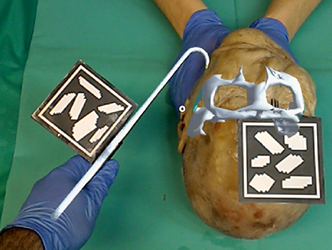
**Background:** Although nearly one-third of the world’s disease burden requires surgical care, only a small proportion of digital health applications are directly used in the surgical field. In the coming decades, the application of augmented reality (AR) with a new generation of optical-see-through head-mounted displays (OST-HMDs) like the HoloLens (Microsoft Corp) has the potential to bring digital health into the surgical field. However, for the application to be performed on a living person, proof of performance must first be provided due to regulatory requirements. In this regard, cadaver studies could provide initial evidence.
**Objective:** The goal of the research was to develop an open-source system for AR-based surgery on human cadavers using freely available technologies.
**Methods:** We tested our system using an easy-to-understand scenario in which fractured zygomatic arches of the face had to be repositioned with visual and auditory feedback to the investigators using a HoloLens. Results were verified with postoperative imaging and assessed in a blinded fashion by 2 investigators. The developed system and scenario were qualitatively evaluated by consensus interview and individual questionnaires.
**Results:** The development and implementation of our system was feasible and could be realized in the course of a cadaver study. The AR system was found helpful by the investigators for spatial perception in addition to the combination of visual as well as auditory feedback. The surgical end point could be determined metrically as well as by assessment.
**Conclusions:** The development and application of an AR-based surgical system using freely available technologies to perform OST-HMD–guided surgical procedures in cadavers is feasible. Cadaver studies are suitable for OST-HMD–guided interventions to measure a surgical end point and provide an initial data foundation for future clinical trials. The availability of free systems for researchers could be helpful for a possible translation process from digital health to AR-based surgery using OST-HMDs in the operating theater via cadaver studies.
@article{puladi2022augmented,
title={Augmented Reality-Based Surgery on the Human Cadaver Using a New Generation of Optical Head-Mounted Displays: Development and Feasibility Study},
author={Puladi, Behrus and Ooms, Mark and Bellgardt, Martin and Cesov, Mark and Lipprandt, Myriam and Raith, Stefan and Peters, Florian and M{\"o}hlhenrich, Stephan Christian and Prescher, Andreas and H{\"o}lzle, Frank and others},
journal={JMIR Serious Games},
volume={10},
number={2},
pages={e34781},
year={2022},
publisher={JMIR Publications Inc., Toronto, Canada}
}
Quantitative Mapping of Keratin Networks in 3D
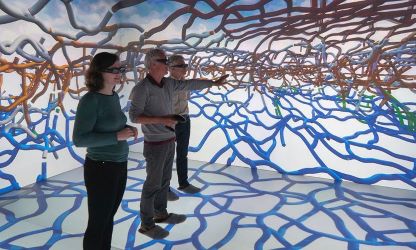
Mechanobiology requires precise quantitative information on processes taking place in specific 3D microenvironments. Connecting the abundance of microscopical, molecular, biochemical, and cell mechanical data with defined topologies has turned out to be extremely difficult. Establishing such structural and functional 3D maps needed for biophysical modeling is a particular challenge for the cytoskeleton, which consists of long and interwoven filamentous polymers coordinating subcellular processes and interactions of cells with their environment. To date, useful tools are available for the segmentation and modeling of actin filaments and microtubules but comprehensive tools for the mapping of intermediate filament organization are still lacking. In this work, we describe a workflow to model and examine the complete 3D arrangement of the keratin intermediate filament cytoskeleton in canine, murine, and human epithelial cells both, in vitro and in vivo. Numerical models are derived from confocal Airyscan high-resolution 3D imaging of fluorescence-tagged keratin filaments. They are interrogated and annotated at different length scales using different modes of visualization including immersive virtual reality. In this way, information is provided on network organization at the subcellular level including mesh arrangement, density, and isotropic configuration as well as details on filament morphology such as bundling, curvature, and orientation. We show that the comparison of these parameters helps to identify, in quantitative terms, similarities and differences of keratin network organization in epithelial cell types defining subcellular domains, notably basal, apical, lateral, and perinuclear systems. The described approach and the presented data are pivotal for generating mechanobiological models that can be experimentally tested.
@article {Windoffer2022,
article_type = {journal},
title = {{Quantitative Mapping of Keratin Networks in 3D}},
author = {Windoffer, Reinhard and Schwarz, Nicole and Yoon, Sungjun and Piskova, Teodora and Scholkemper, Michael and Stegmaier, Johannes and Bönsch, Andrea and Di Russo, Jacopo and Leube, Rudolf},
editor = {Coulombe, Pierre},
volume = 11,
year = 2022,
month = {feb},
pub_date = {2022-02-18},
pages = {e75894},
citation = {eLife 2022;11:e75894},
doi = {10.7554/eLife.75894},
url = {https://doi.org/10.7554/eLife.75894},
journal = {eLife},
issn = {2050-084X},
publisher = {eLife Sciences Publications, Ltd},
}
Quantitative Evaluation of SPH in TIG Spot Welding
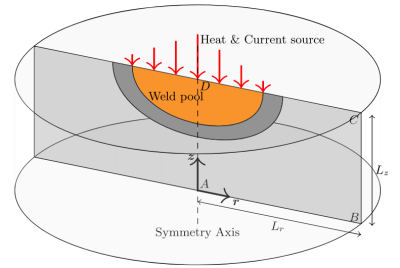
While the application of the Smoothed Particle Hydrodynamics (SPH) method for the modeling of welding processes has become increasingly popular in recent years, little is yet known about the quantitative predictive capability of this method. We propose a novel SPH model for the simulation of the tungsten inert gas (TIG) spot welding process and conduct a thorough comparison between our SPH implementation and two Finite Element Method (FEM) based models. In order to be able to quantitatively compare the results of our SPH simulation method with grid based methods we additionally propose an improved particle to grid interpolation method based on linear least-squares with an optional hole-filling pass which accounts for missing particles. We show that SPH is able to yield excellent results, especially given the observed deviations between the investigated FEM methods and as such, we validate the accuracy of the method for an industrially relevant engineering application.
@Article{JSS+22,
author = {Stefan Rhys Jeske and Marek Sebastian Simon and Oleksii Semenov and Jan Kruska and Oleg Mokrov and Rahul Sharma and Uwe Reisgen and Jan Bender},
journal = {Computational Particle Mechanics},
title = {Quantitative evaluation of {SPH} in {TIG} spot welding},
year = {2022},
month = {apr},
doi = {10.1007/s40571-022-00465-x},
publisher = {Springer Science and Business Media {LLC}},
}
Application and Benchmark of SPH for Modeling the Impact in Thermal Spraying
The properties of a thermally sprayed coating, such as its durability or thermal conductivity depend on its microstructure, which is in turn directly related to the particle impact process. To simulate this process we present a 3D Smoothed Particle Hydrodynamics (SPH) model, which represents the molten droplet as an incompressible fluid, while a semi-implicit Enthalpy-Porosity method is applied for modeling the phase change during solidification. In addition, we present an implicit correction for SPH simulations, based on well known approaches, from which we can observe improved performance and simulation stability. We apply our SPH method to the impact and solidification of Al2O3 droplets onto a substrate and perform a comprehensive quantitative comparison of our method with the commercial software Ansys Fluent using the Volume of Fluid (VOF) approach, while taking identical physical effects into consideration. The results are evaluated in depth and we discuss the applicability of either method for the simulation of thermal spray deposition. We also evaluate the droplet spread factor given varying initial droplet diameters and compare these results with an analytic expression from previous literature. We show that SPH is an excellent method for solving this free surface problem accurately and efficiently.
@Article{JBB+22,
author = {Stefan Rhys Jeske and Jan Bender and Kirsten Bobzin and Hendrik Heinemann and Kevin Jasutyn and Marek Simon and Oleg Mokrov and Rahul Sharma and Uwe Reisgen},
journal = {Computational Particle Mechanics},
title = {Application and benchmark of {SPH} for modeling the impact in thermal spraying},
year = {2022},
month = {jan},
doi = {10.1007/s40571-022-00459-9},
publisher = {Springer Science and Business Media {LLC}},
}
MODE: A modern ordinary differential equation solver for C++ and CUDA
Ordinary differential equations (ODE) are used to describe the evolution of one or more dependent variables using their derivatives with respect to an independent variable. They arise in various branches of natural sciences and engineering. We present a modern, efficient, performance-oriented ODE solving library built in C++20. The library implements a broad range of multi-stage and multi-step methods, which are generated at compile-time from their tableau representations, avoiding runtime overhead. The solvers can be instantiated and iterated on the CPU and the GPU using identical code. This work introduces the prominent features of the library with examples
Poster: A C++20 Interface for MPI 4.0
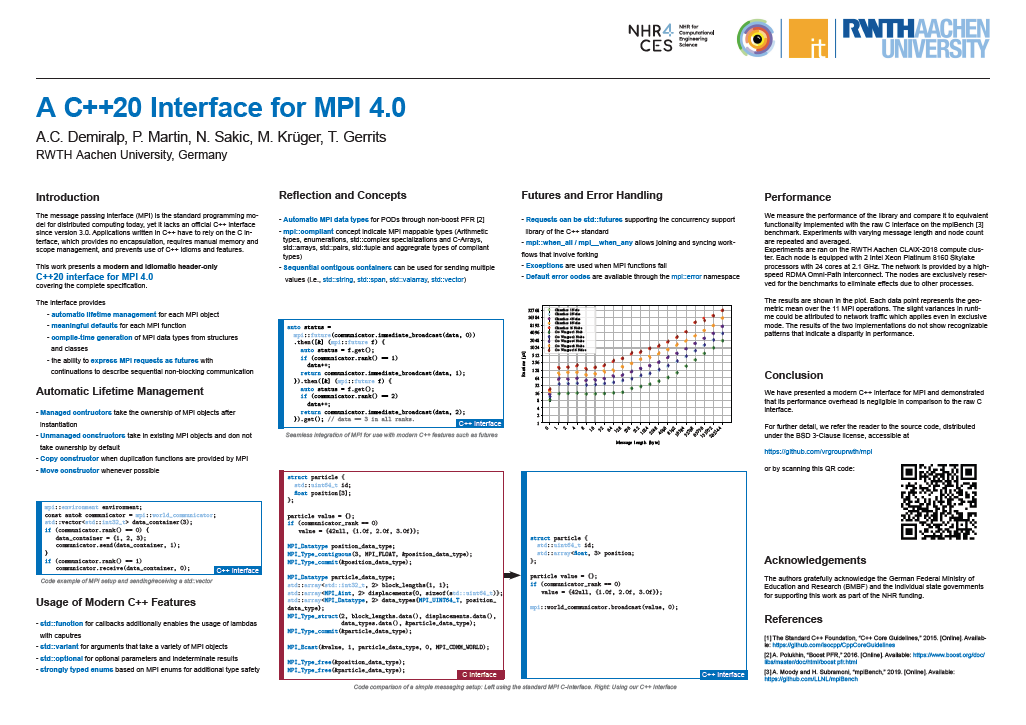
We present a modern C++20 interface for MPI 4.0. The interface utilizes recent language features to ease development of MPI applications. An aggregate reflection system enables generation of MPI data types from user-defined classes automatically. Immediate and persistent operations are mapped to futures, which can be chained to describe sequential asynchronous operations and task graphs in a concise way. This work introduces the prominent features of the interface with examples. We further measure its performance overhead with respect to the raw C interface.
@misc{demiralp2023c20,
title={A C++20 Interface for MPI 4.0},
author={Ali Can Demiralp and Philipp Martin and Niko Sakic and Marcel Krüger and Tim Gerrits},
year={2023},
eprint={2306.11840},
archivePrefix={arXiv},
primaryClass={cs.DC}
}
Poster: Measuring Listening Effort in Adverse Listening Conditions: Testing Two Dual Task Paradigms for Upcoming Audiovisual Virtual Reality Experiments
Listening to and remembering the content of conversations is a highly demanding task from a cognitive-psychological perspective. Particularly, in adverse listening conditions cognitive resources available for higher-level processing of speech are reduced since increased listening effort consumes more of the overall available cognitive resources. Applying audiovisual Virtual Reality (VR) environments to listening research could be highly beneficial for exploring cognitive performance for overheard content. In this study, we therefore evaluated two (secondary) tasks concerning their suitability for measuring cognitive spare capacity as an indicator of listening effort in audiovisual VR environments. In two experiments, participants were administered a dual-task paradigm including a listening primary) task in which a conversation between two talkers is presented, and an unrelated secondary task each. Both experiments were carried out without additional background noise and under continuous noise. We discuss our results in terms of guidance for future experimental studies, especially in audiovisual VR environments.
@InProceedings{ Mohanathasan2022ESCoP,
author = { Chinthusa Mohanathasan, Jonathan Ehret, Cosima A.
Ermert, Janina Fels, Torsten Wolfgang Kuhlen and Sabine J. Schlittmeier},
booktitle = { 22. Conference of the European Society for Cognitive
Psychology , Lille , France , ESCoP},
title = { Measuring Listening Effort in Adverse Listening
Conditions: Testing Two Dual Task Paradigms for Upcoming Audiovisual Virtual
Reality Experiments},
year = {2022},
}
The aixCAVE at RWTH Aachen University
At a large technical university like RWTH Aachen, there is enormous potential to use VR as a tool in research. In contrast to applications from the entertainment sector, many scientific application scenarios - for example, a 3D analysis of result data from simulated flows - not only depend on a high degree of immersion, but also on a high resolution and excellent image quality of the display. In addition, the visual analysis of scientific data is often carried out and discussed in smaller teams. For these reasons, but also for simple ergonomic aspects (comfort, cybersickness), many technical and scientific VR applications cannot just be implemented on the basis of head-mounted displays. To this day, in VR Labs of universities and research institutions, it is therefore desirable to install immersive large-screen rear projection systems (CAVEs) in order to adequately support the scientists. Due to the high investment costs, such systems are used at larger universities such as Aachen, Cologne, Munich, or Stuttgart, often operated by the computing centers as a central infrastructure accessible to all scientists at the university.
Interactive Segmentation of Textured Point Clouds
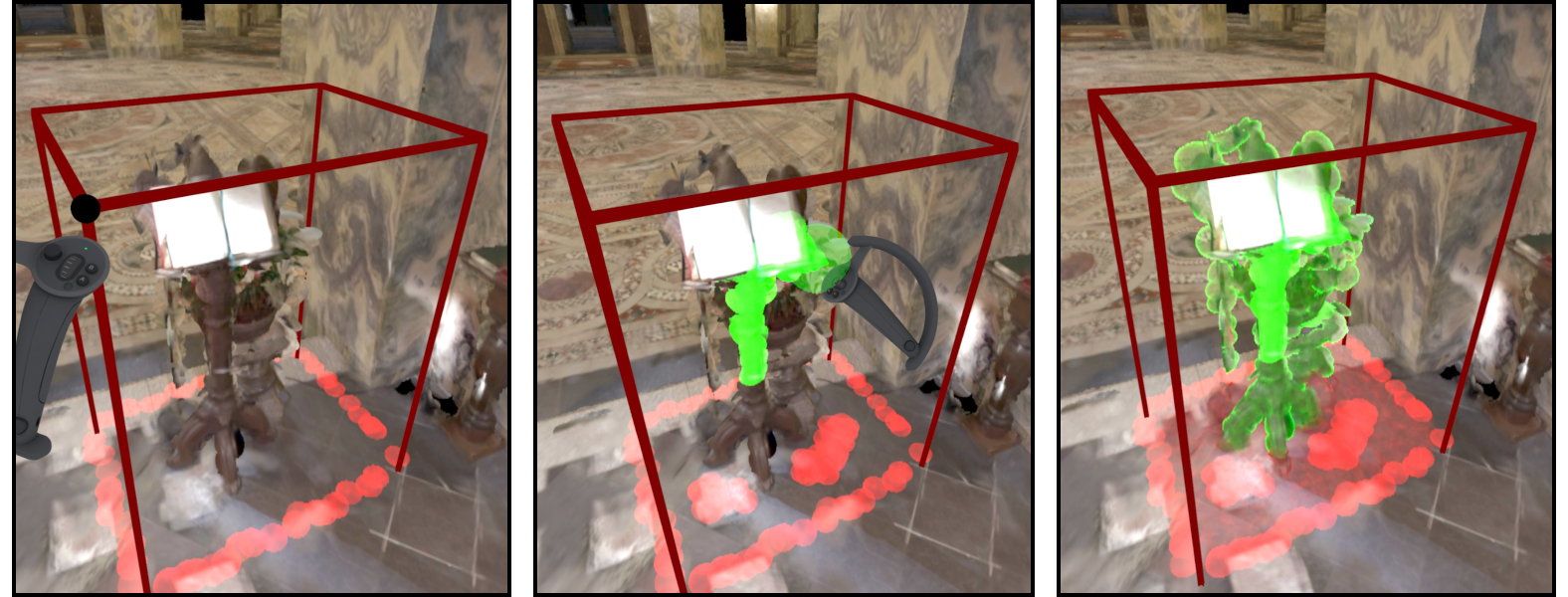
We present a method for the interactive segmentation of textured 3D point clouds. The problem is formulated as a minimum graph cut on a k-nearest neighbor graph and leverages the rich information contained in high-resolution photographs as the discriminative feature. We demonstrate that the achievable segmentation accuracy is significantly improved compared to using an average color per point as in prior work. The method is designed to work efficiently on large datasets and yields results at interactive rates. This way, an interactive workflow can be realized in an immersive virtual environment, which supports the segmentation task by improved depth perception and the use of tracked 3D input devices. Our method enables to create high-quality segmentations of textured point clouds fast and conveniently.
@inproceedings {10.2312:vmv.20221200,
booktitle = {Vision, Modeling, and Visualization},
editor = {Bender, Jan and Botsch, Mario and Keim, Daniel A.},
title = {{Interactive Segmentation of Textured Point Clouds}},
author = {Schmitz, Patric and Suder, Sebastian and Schuster, Kersten and Kobbelt, Leif},
year = {2022},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-189-2},
DOI = {10.2312/vmv.20221200}
}
M2F3D: Mask2Former for 3D Instance Segmentation
In this work, we show that the top performing Mask2Former approach for image-based segmentation tasks works surprisingly well when adapted to the 3D scene understanding domain. Current 3D semantic instance segmentation methods rely largely on predicting centers followed by clustering approaches and little progress has been made in applying transformer-based approaches to this task. We show that with small modifications to the Mask2Former approach for 2D, we can create a 3D instance segmentation approach, without the need for highly 3D specific components or carefully hand-engineered hyperparameters. Initial experiments with our M2F3D model on the ScanNet benchmark are very promising and sets a new state-of-the-art on ScanNet test (+0.4 mAP50).
Please see our extended work Mask3D: Mask Transformer for 3D Instance Segmentation accepted at ICRA 2023.
Automatic region-growing system for the segmentation of large point clouds
This article describes a complete unsupervised system for the segmentation of massive 3D point clouds. Our system bridges the missing components that permit to go from 99% automation to 100% automation for the construction industry. It scales up to billions of 3D points and targets a generic low-level grouping of planar regions usable by a wide range of applications. Furthermore, we introduce a hierarchical multi-level segment definition to cope with potential variations in high-level object definitions. The approach first leverages planar predominance in scenes through a normal-based region growing. Then, for usability and simplicity, we designed an automatic heuristic to determine without user supervision three RANSAC-inspired parameters. These are the distance threshold for the region growing, the threshold for the minimum number of points needed to form a valid planar region, and the decision criterion for adding points to a region. Our experiments are conducted on 3D scans of complex buildings to test the robustness of the “one-click” method in varying scenarios. Labelled and instantiated point clouds from different sensors and platforms (depth sensor, terrestrial laser scanner, hand-held laser scanner, mobile mapping system), in different environments (indoor, outdoor, buildings) and with different objects of interests (AEC-related, BIM-related, navigation-related) are provided as a new extensive test-bench. The current implementation processes ten million points per minutes on a single thread CPU configuration. Moreover, the resulting segments are tested for the high-level task of semantic segmentation over 14 classes, to achieve an F1-score of 90+ averaged over all datasets while reducing the training phase to a fraction of state of the art point-based deep learning methods. We provide this baseline along with six new open-access datasets with 300+ million hand-labelled and instantiated 3D points at: https://www.graphics.rwth-aachen.de/project/ 45/.
@article{POUX2022104250,
title = {Automatic region-growing system for the segmentation of large point clouds},
journal = {Automation in Construction},
volume = {138},
pages = {104250},
year = {2022},
issn = {0926-5805},
doi = {https://doi.org/10.1016/j.autcon.2022.104250},
url = {https://www.sciencedirect.com/science/article/pii/S0926580522001236},
author = {F. Poux and C. Mattes and Z. Selman and L. Kobbelt},
keywords = {3D point cloud, Segmentation, Region-growing, RANSAC, Unsupervised clustering}
}
Global Hierarchical Attention for 3D Point Cloud Analysis
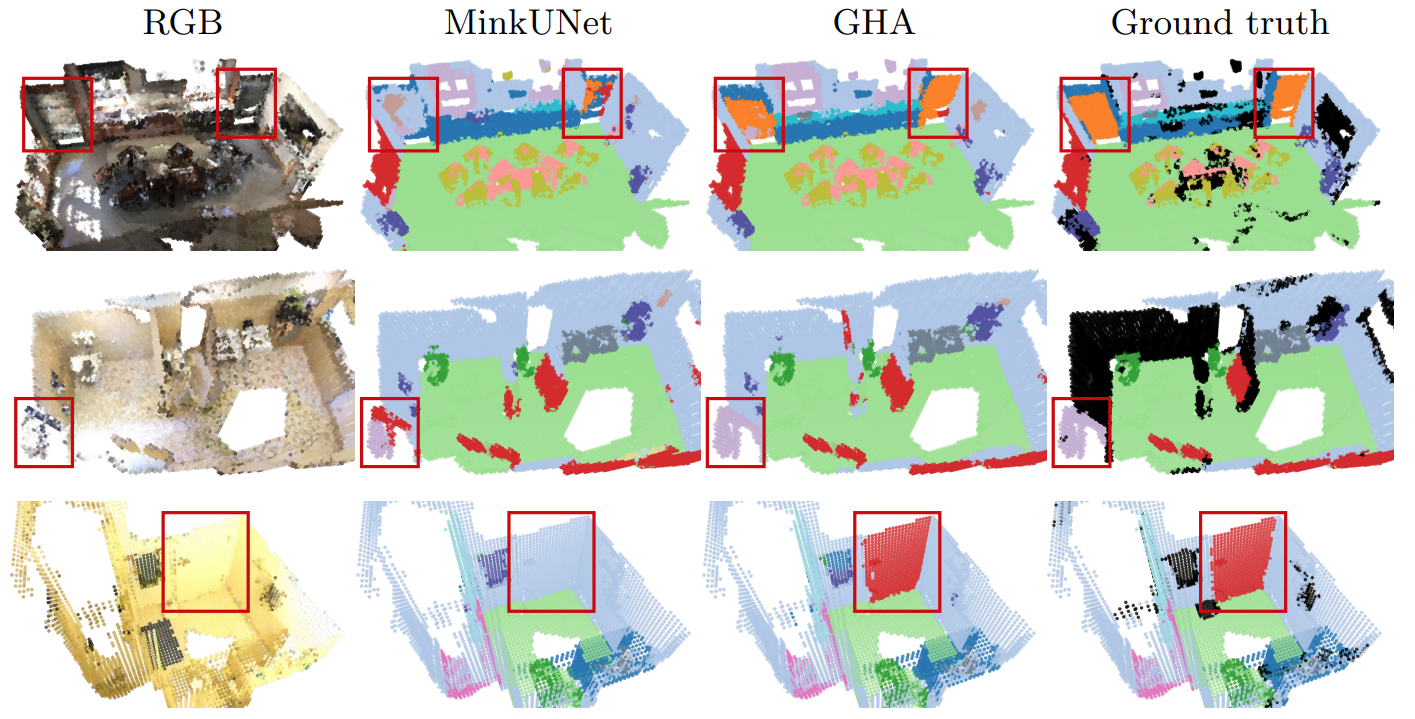
We propose a new attention mechanism, called Global Hierarchical Attention (GHA), for 3D point cloud analysis. GHA approximates the regular global dot-product attention via a series of coarsening and interpolation operations over multiple hierarchy levels. The advantage of GHA is two-fold. First, it has linear complexity with respect to the number of points, enabling the processing of large point clouds. Second, GHA inherently possesses the inductive bias to focus on spatially close points, while retaining the global connectivity among all points. Combined with a feedforward network, GHA can be inserted into many existing network architectures. We experiment with multiple baseline networks and show that adding GHA consistently improves performance across different tasks and datasets. For the task of semantic segmentation, GHA gives a +1.7% mIoU increase to the MinkowskiEngine baseline on ScanNet. For the 3D object detection task, GHA improves the CenterPoint baseline by +0.5% mAP on the nuScenes dataset, and the 3DETR baseline by +2.1% mAP25 and +1.5% mAP50 on ScanNet.
Pedestrian-Robot Interactions on Autonomous Crowd Navigation: Reactive Control Methods and Evaluation Metrics

Autonomous navigation in highly populated areas remains a challenging task for robots because of the difficulty in guaranteeing safe interactions with pedestrians in unstructured situations. In this work, we present a crowd navigation control framework that delivers continuous obstacle avoidance and post-contact control evaluated on an autonomous personal mobility vehicle. We propose evaluation metrics for accounting efficiency, controller response and crowd interactions in natural crowds. We report the results of over 110 trials in different crowd types: sparse, flows, and mixed traffic, with low- (< 0.15 ppsm), mid- (< 0.65 ppsm), and high- (< 1 ppsm) pedestrian densities. We present comparative results between two low-level obstacle avoidance methods and a baseline of shared control. Results show a 10% drop in relative time to goal on the highest density tests, and no other efficiency metric decrease. Moreover, autonomous navigation showed to be comparable to shared-control navigation with a lower relative jerk and significantly higher fluency in commands indicating high compatibility with the crowd. We conclude that the reactive controller fulfills a necessary task of fast and continuous adaptation to crowd navigation, and it should be coupled with high-level planners for environmental and situational awareness.
Differentiable Soft-Masked Attention
Transformers have become prevalent in computer vision due to their performance and flexibility in modelling complex operations. Of particular significance is the ‘cross-attention’ operation, which allows a vector representation (e.g. of an object in an image) to be learned by ‘attending’ to an arbitrarily sized set of input features. Recently, ‘Masked Attention’ was proposed in which a given object representation only attends to those image pixel features for which the segmentation mask of that object is active. This specialization of attention proved beneficial for various image and video segmentation tasks. In this paper, we propose another specialization of attention which enables attending over ‘soft-masks’ (those with continuous mask probabilities instead of binary values), and is also differentiable through these mask probabilities, thus allowing the mask used for attention to be learned within the network without requiring direct loss supervision. This can be useful for several applications. Specifically, we employ our ‘Differentiable Soft-Masked Attention’ for the task of Weakly Supervised Video Object Segmentation (VOS), where we develop a transformer-based network for VOS which only requires a single annotated image frame for training, but can also benefit from cycle consistency training on a video with just one annotated frame. Although there is no loss for masks in unlabeled frames, the network is still able to segment objects in those frames due to our novel attention formulation.
Late-Breaking Report: Natural Turn-Taking with Embodied Conversational Agents
Adding embodied conversational agents (ECAs) to immersive virtual environments (IVEs) becomes relevant in various application scenarios, for example, conversational systems. For successful interactions with these ECAs, they have to behave naturally, i.e. in the way a user would expect a real human to behave. Teaming up with acousticians and psychologists, we strive to explore turn-taking in VR-based interactions between either two ECAs or an ECA and a human user.
Late-Breaking Report: An Embodied Conversational Agent Supporting Scene Exploration by Switching between Guiding and Accompanying

In this late-breaking report, we first motivate the requirement of an embodied conversational agent (ECA) who combines characteristics of a virtual tour guide and a knowledgeable companion in order to allow users an interactive and adaptable, however, structured exploration of an unknown immersive, architectural environment. Second, we roughly outline our proposed ECA’s behavioral design followed by a teaser on the planned user study.
2D vs. 3D LiDAR-based Person Detection on Mobile Robots
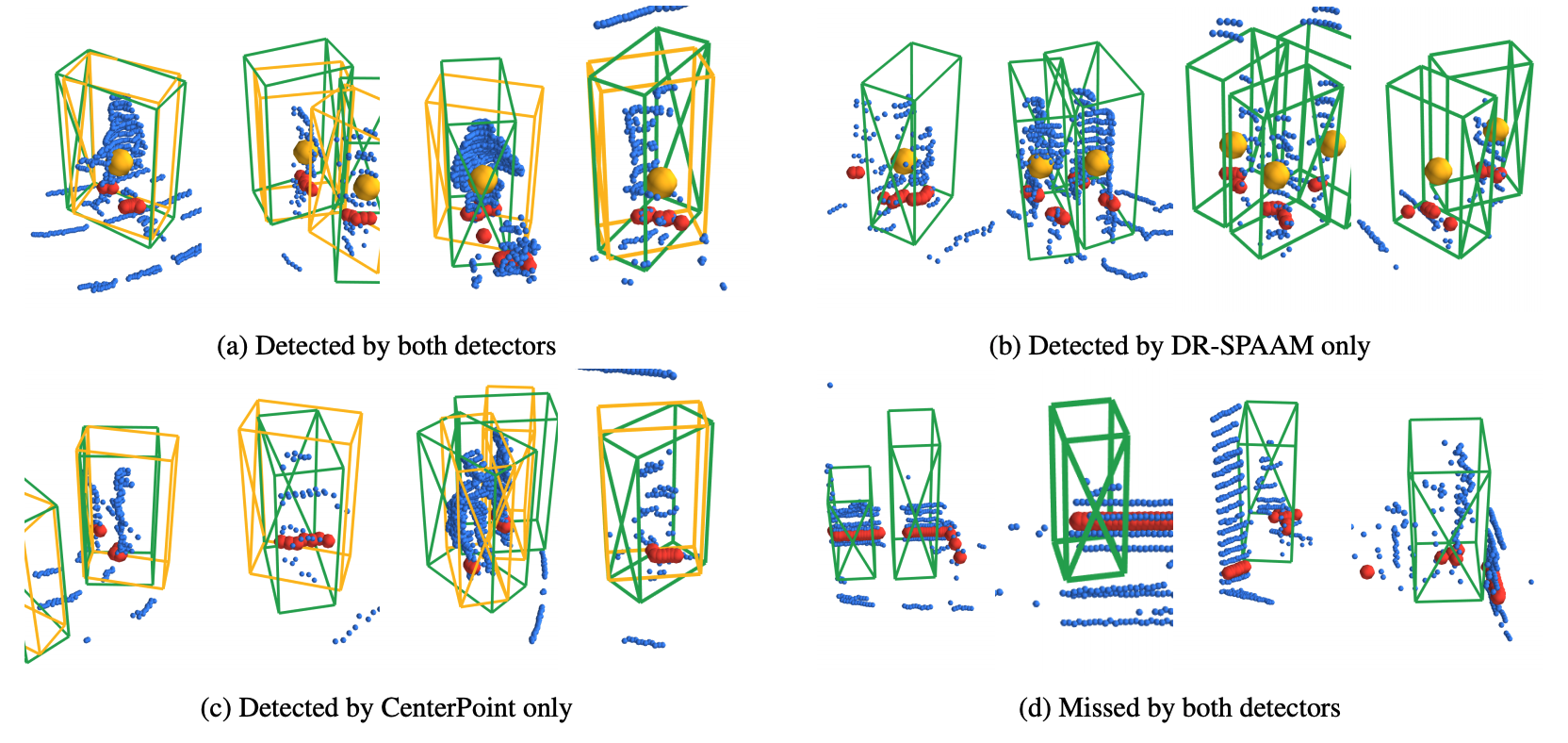
Person detection is a crucial task for mobile robots navigating in human-populated environments. LiDAR sensors are promising for this task, thanks to their accurate depth measurements and large field of view. Two types of LiDAR sensors exist: the 2D LiDAR sensors, which scan a single plane, and the 3D LiDAR sensors, which scan multiple planes, thus forming a volume. How do they compare for the task of person detection? To answer this, we conduct a series of experiments, using the public, large-scale JackRabbot dataset and the state-of-the-art 2D and 3D LiDAR-based person detectors (DR-SPAAM and CenterPoint respectively). Our experiments include multiple aspects, ranging from the basic performance and speed comparison, to more detailed analysis on localization accuracy and robustness against distance and scene clutter. The insights from these experiments highlight the strengths and weaknesses of 2D and 3D LiDAR sensors as sources for person detection, and are especially valuable for designing mobile robots that will operate in close proximity to surrounding humans (e.g. service or social robot).
Mix3D: Out-of-Context Data Augmentation for 3D Scenes
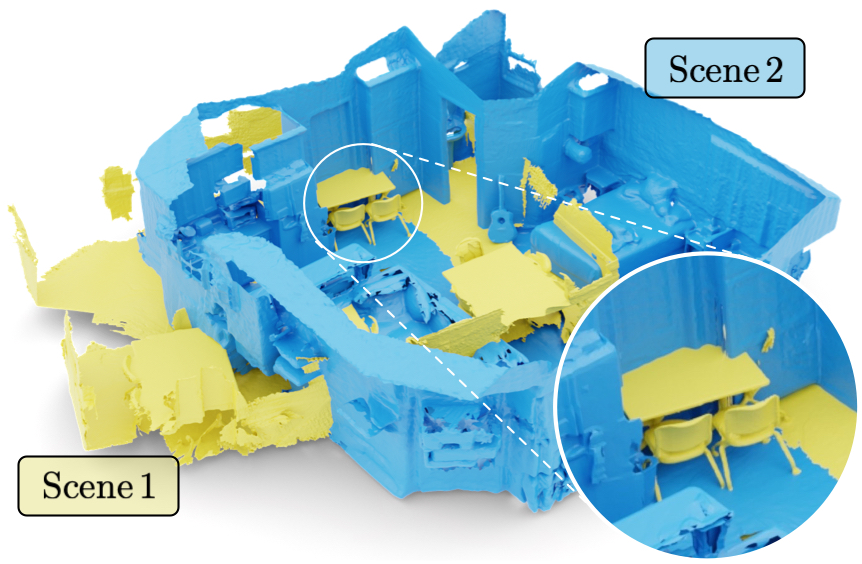
Mix3D is a data augmentation technique for segmenting large-scale 3D scenes. Since scene context helps reasoning about object semantics, current works focus on models with large capacity and receptive fields that can fully capture the global context of an input 3D scene. However, strong contextual priors can have detrimental implications like mistaking a pedestrian crossing the street for a car. In this work, we focus on the importance of balancing global scene context and local geometry, with the goal of generalizing beyond the contextual priors in the training set. In particular, we propose a "mixing" technique which creates new training samples by combining two augmented scenes. By doing so, object instances are implicitly placed into novel out-of-context environments and therefore making it harder for models to rely on scene context alone, and instead infer semantics from local structure as well.
In the paper, we perform detailed analysis to understand the importance of global context, local structures and the effect of mixing scenes. In experiments, we show that models trained with Mix3D profit from a significant performance boost on indoor (ScanNet, S3DIS) and outdoor datasets (SemanticKITTI). Mix3D can be trivially used with any existing method, e.g., trained with Mix3D, MinkowskiNet outperforms all prior state-of-the-art methods by a significant margin on the ScanNet test benchmark 78.1 mIoU.
@inproceedings{Nekrasov213DV,
title = {{Mix3D: Out-of-Context Data Augmentation for 3D Scenes}},
author = {Nekrasov, Alexey and Schult, Jonas and Or, Litany and Leibe, Bastian and Engelmann, Francis},
booktitle = {{International Conference on 3D Vision (3DV)}},
year = {2021}
}
From Points to Multi-Object 3D Reconstruction

We propose a method to detect and reconstruct multiple 3D objects from a single RGB image. The key idea is to optimize for detection, alignment and shape jointly over all objects in the RGB image, while focusing on realistic and physically plausible reconstructions. To this end, we propose a keypoint detector that localizes objects as center points and directly predicts all object properties, including 9-DoF bounding boxes and 3D shapes -- all in a single forward pass. The proposed method formulates 3D shape reconstruction as a shape selection problem, i.e. it selects among exemplar shapes from a given database. This makes it agnostic to shape representations, which enables a lightweight reconstruction of realistic and visually-pleasing shapes based on CAD-models, while the training objective is formulated around point clouds and voxel representations. A collision-loss promotes non-intersecting objects, further increasing the reconstruction realism. Given the RGB image, the presented approach performs lightweight reconstruction in a single-stage, it is real-time capable, fully differentiable and end-to-end trainable. Our experiments compare multiple approaches for 9-DoF bounding box estimation, evaluate the novel shape-selection mechanism and compare to recent methods in terms of 3D bounding box estimation and 3D shape reconstruction quality.
@inproceedings{Engelmann21CVPR,
title = {{From Points to Multi-Object 3D Reconstruction}},
author = {Engelmann, Francis and Rematas, Konstantinos and Leibe, Bastian and Ferrari, Vittorio},
booktitle = {{IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}},
year = {2021}
}
3D Shape Generation with Grid-based Implicit Functions
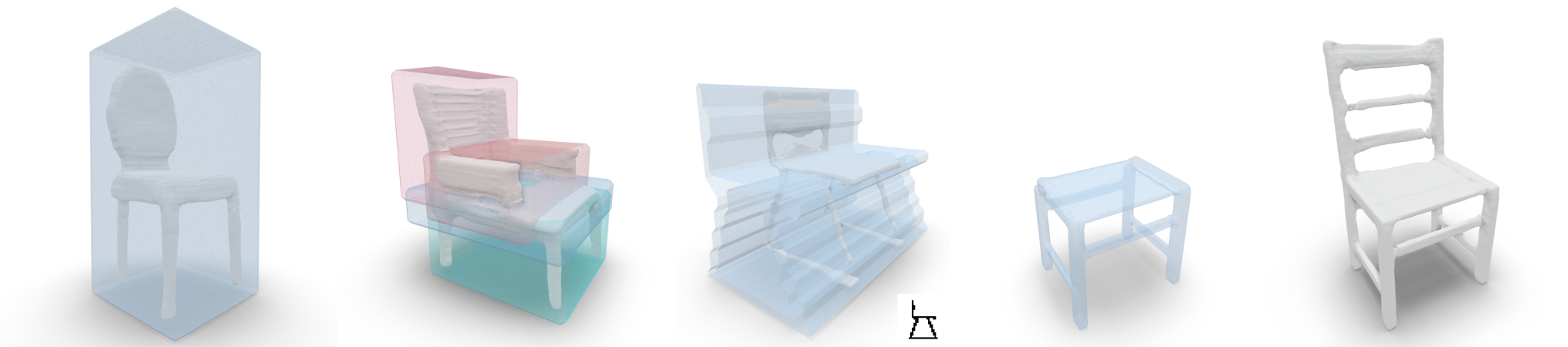
Previous approaches to generate shapes in a 3D setting train a GAN on the latent space of an autoencoder (AE). Even though this produces convincing results, it has two major shortcomings. As the GAN is limited to reproduce the dataset the AE was trained on, we cannot reuse a trained AE for novel data. Furthermore, it is difficult to add spatial supervision into the generation process, as the AE only gives us a global representation. To remedy these issues, we propose to train the GAN on grids (i.e. each cell covers a part of a shape). In this representation each cell is equipped with a latent vector provided by an AE. This localized representation enables more expressiveness (since the cell-based latent vectors can be combined in novel ways) as well as spatial control of the generation process (e.g. via bounding boxes). Our method outperforms the current state of the art on all established evaluation measures, proposed for quantitatively evaluating the generative capabilities of GANs. We show limitations of these measures and propose the adaptation of a robust criterion from statistical analysis as an alternative.
@inproceedings {ibing20213Dshape,
title = {3D Shape Generation with Grid-based Implicit Functions},
author = {Ibing, Moritz and Lim, Isaak and Kobbelt, Leif},
booktitle = {IEEE Computer Vision and Pattern Recognition (CVPR)},
pages = {},
year = {2021}
}
Implicit Density Projection for Volume Conserving Liquids
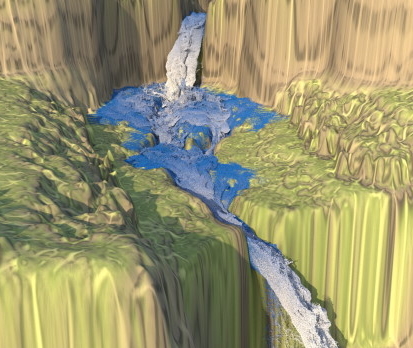
We propose a novel implicit density projection approach for hybrid Eulerian/Lagrangian methods like FLIP and APIC to enforce volume conservation of incompressible liquids. Our approach is able to robustly recover from highly degenerate configurations and incorporates volume-conserving boundary handling. A problem of the standard divergence-free pressure solver is that it only has a differential view on density changes. Numerical volume errors, which occur due to large time steps and the limited accuracy of pressure projections, are invisible to the solver and cannot be corrected. Moreover, these errors accumulate over time and can lead to drastic volume changes, especially in long-running simulations or interactive scenarios. Therefore, we introduce a novel method that enforces constant density throughout the fluid. The density itself is tracked via the particles of the hybrid Eulerian/Lagrangian simulation algorithm. To achieve constant density, we use the continuous mass conservation law to derive a pressure Poisson equation which also takes density deviations into account. It can be discretized with standard approaches and easily implemented into existing code by extending the regular pressure solver. Our method enables us to relax the strict time step and solver accuracy requirements of a regular solver, leading to significantly higher performance. Moreover, our approach is able to push fluid particles out of solid obstacles without losing volume and generates more uniform particle distributions, which makes frequent particle resampling unnecessary. We compare the proposed method to standard FLIP and APIC and to previous volume correction approaches in several simulations and demonstrate significant improvements in terms of incompressibility, visual realism and computational performance.
@Article{BKKW21,
author = {Tassilo Kugelstadt and Andreas Longva and Nils Thuerey and Jan Bender},
title = {Implicit Density Projection for Volume Conserving Liquids},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2021},
publisher = {IEEE},
volume = {27},
number = {4},
doi={ 10.1109/TVCG.2019.2947437},
}
Do Prosody and Embodiment Influence the Perceived Naturalness of Conversational Agents' Speech?
presented at ACM Symposium on Applied Perception (SAP)

For conversational agents’ speech, all possible sentences have to be either prerecorded by voice actors or the required utterances can be synthesized. While synthesizing speech is more flexible and economic in production, it also potentially reduces the perceived naturalness of the agents amongst others due to mistakes at various linguistic levels. In our paper, we are interested in the impact of adequate and inadequate prosody, here particularly in terms of accent placement, on the perceived naturalness and aliveness of the agents. We compare (i) inadequate prosody, as generated by off-the-shelf text-to-speech (TTS) engines with synthetic output, (ii) the same inadequate prosody imitated by trained human speakers and (iii) adequate prosody produced by those speakers. The speech was presented either as audio-only or by embodied, anthropomorphic agents, to investigate the potential masking effect by a simultaneous visual representation of those virtual agents. To this end, we conducted an online study with 40 participants listening to four different dialogues each presented in the three Speech levels and the two Embodiment levels. Results confirmed that adequate prosody in human speech is perceived as more natural (and the agents are perceived as more alive) than inadequate prosody in both human (ii) and synthetic speech (i). Thus, it is not sufficient to just use a human voice for an agent’s speech to be perceived as natural - it is decisive whether the prosodic realisation is adequate or not. Furthermore, and surprisingly, we found no masking effect by speaker embodiment, since neither a human voice with inadequate prosody nor a synthetic voice was judged as more natural, when a virtual agent was visible compared to the audio-only condition. On the contrary, the human voice was even judged as less “alive” when accompanied by a virtual agent. In sum, our results emphasize on the one hand the importance of adequate prosody for perceived naturalness, especially in terms of accents being placed on important words in the phrase, while showing on the other hand that the embodiment of virtual agents plays a minor role in naturalness ratings of voices.
@article{Ehret2021a,
author = {Ehret, Jonathan and B\"{o}nsch, Andrea and Asp\"{o}ck, Lukas and R\"{o}hr, Christine T. and Baumann, Stefan and Grice, Martine and Fels, Janina and Kuhlen, Torsten W.},
title = {Do Prosody and Embodiment Influence the Perceived Naturalness of Conversational Agents’ Speech?},
journal = {ACM transactions on applied perception},
year = {2021},
issue_date = {October 2021},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {18},
number = {4},
articleno = {21},
issn = {1544-3558},
url = {https://doi.org/10.1145/3486580},
doi = {10.1145/3486580},
numpages = {15},
keywords = {speech, audio, accentuation, prosody, text-to-speech, Embodied conversational agents (ECAs), virtual acoustics, embodiment}
}
Being Guided or Having Exploratory Freedom: User Preferences of a Virtual Agent’s Behavior in a Museum

A virtual guide in an immersive virtual environment allows users a structured experience without missing critical information. However, although being in an interactive medium, the user is only a passive listener, while the embodied conversational agent (ECA) fulfills the active roles of wayfinding and conveying knowledge. Thus, we investigated for the use case of a virtual museum, whether users prefer a virtual guide or a free exploration accompanied by an ECA who imparts the same information compared to the guide. Results of a small within-subjects study with a head-mounted display are given and discussed, resulting in the idea of combining benefits of both conditions for a higher user acceptance. Furthermore, the study indicated the feasibility of the carefully designed scene and ECA’s appearance.
We also submitted a GALA video entitled "An Introduction to the World of Internet Memes by Curator Kate: Guiding or Accompanying Visitors?" by D. Hashem, A. Bönsch, J. Ehret, and T.W. Kuhlen, showcasing our application.
IVA 2021 GALA Audience Award!
@inproceedings{Boensch2021b,
author = {B\"{o}nsch, Andrea and Hashem, David and Ehret, Jonathan and Kuhlen, Torsten W.},
title = {{Being Guided or Having Exploratory Freedom: User Preferences of a Virtual Agent's Behavior in a Museum}},
year = {2021},
isbn = {9781450386197},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3472306.3478339},
doi = {10.1145/3472306.3478339},
booktitle = {{Proceedings of the 21th ACM International Conference on Intelligent Virtual Agents}},
pages = {33–40},
numpages = {8},
keywords = {virtual agents, enjoyment, guiding, virtual reality, free exploration, museum, embodied conversational agents},
location = {Virtual Event, Japan},
series = {IVA '21}
}
Learning Direction Fields for Quad Mesh Generation
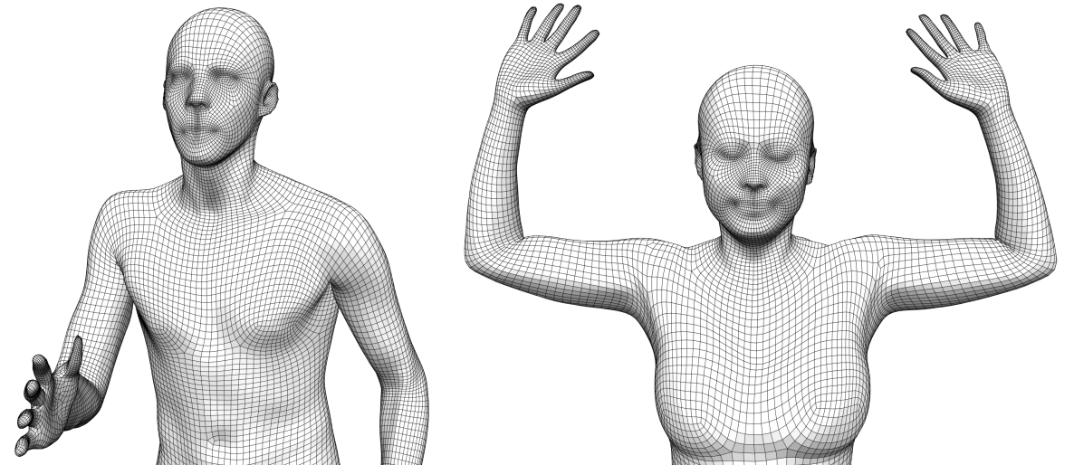
State of the art quadrangulation methods are able to reliably and robustly convert triangle meshes into quad meshes. Most of these methods rely on a dense direction field that is used to align a parametrization from which a quad mesh can be extracted. In this context, the aforementioned direction field is of particular importance, as it plays a key role in determining the structure of the generated quad mesh. If there are no user-provided directions available, the direction field is usually interpolated from a subset of principal curvature directions. To this end, a number of heuristics that aim to identify significant surface regions have been proposed. Unfortunately, the resulting fields often fail to capture the structure found in meshes created by human experts. This is due to the fact that experienced designers can leverage their domain knowledge in order to optimize a mesh for a specific application. In the context of physics simulation, for example, a designer might prefer an alignment and local refinement that facilitates a more accurate numerical simulation. Similarly, a character artist may prefer an alignment that makes the resulting mesh easier to animate. Crucially, this higher level domain knowledge cannot be easily extracted from local curvature information alone. Motivated by this issue, we propose a data-driven approach to the computation of direction fields that allows us to mimic the structure found in existing meshes, which could originate from human experts or other sources. More specifically, we make use of a neural network that aggregates global and local shape information in order to compute a direction field that can be used to guide a parametrization-based quad meshing method. Our approach is a first step towards addressing this challenging problem with a fully automatic learning-based method. We show that compared to classical techniques our data-driven approach combined with a robust model-driven method, is able to produce results that more closely exhibit the ground truth structure of a synthetic dataset (i.e. a manually designed quad mesh template fitted to a variety of human body types in a set of different poses).
@article{dielen2021learning_direction_fields,
title={Learning Direction Fields for Quad Mesh Generation},
author={Dielen, Alexander and Lim, Isaak and Lyon, Max and Kobbelt, Leif},
year={2021},
journal={Computer Graphics Forum},
volume={40},
number={5},
}
Simpler Quad Layouts using Relaxed Singularities
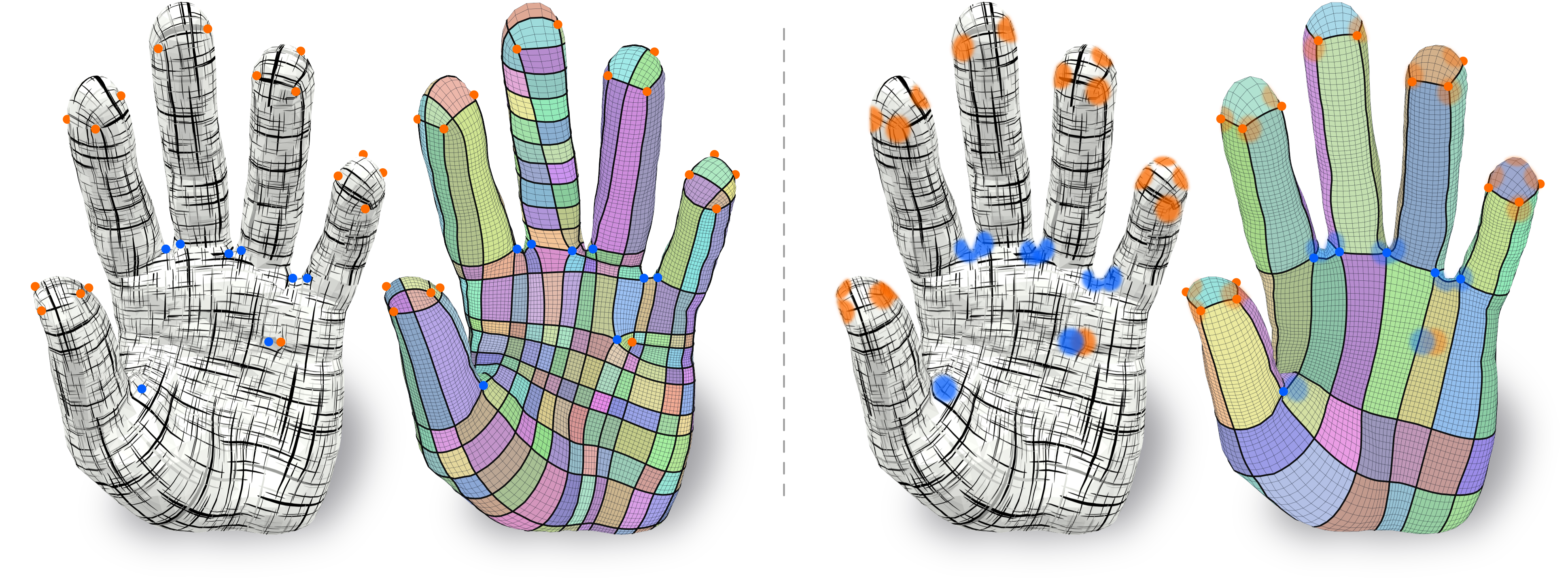
A common approach to automatic quad layout generation on surfaces is to, in a first stage, decide on the positioning of irregular layout vertices, followed by finding sensible layout edges connecting these vertices and partitioning the surface into quadrilateral patches in a second stage. While this two-step approach reduces the problem's complexity, this separation also limits the result quality. In the worst case, the set of layout vertices fixed in the first stage without consideration of the second may not even permit a valid quad layout. We propose an algorithm for the creation of quad layouts in which the initial layout vertices can be adjusted in the second stage. Whenever beneficial for layout quality or even validity, these vertices may be moved within a prescribed radius or even be removed. Our algorithm is based on a robust quantization strategy, turning a continuous T-mesh structure into a discrete layout. We show the effectiveness of our algorithm on a variety of inputs.
@article{lyon2021simplerlayouts,
title={Simpler Quad Layouts using Relaxed Singularities},
author={Lyon, Max and Campen, Marcel and Kobbelt, Leif},
year={2021},
journal={Computer Graphics Forum},
volume={40},
number={5},
}
Surface Map Homology Inference
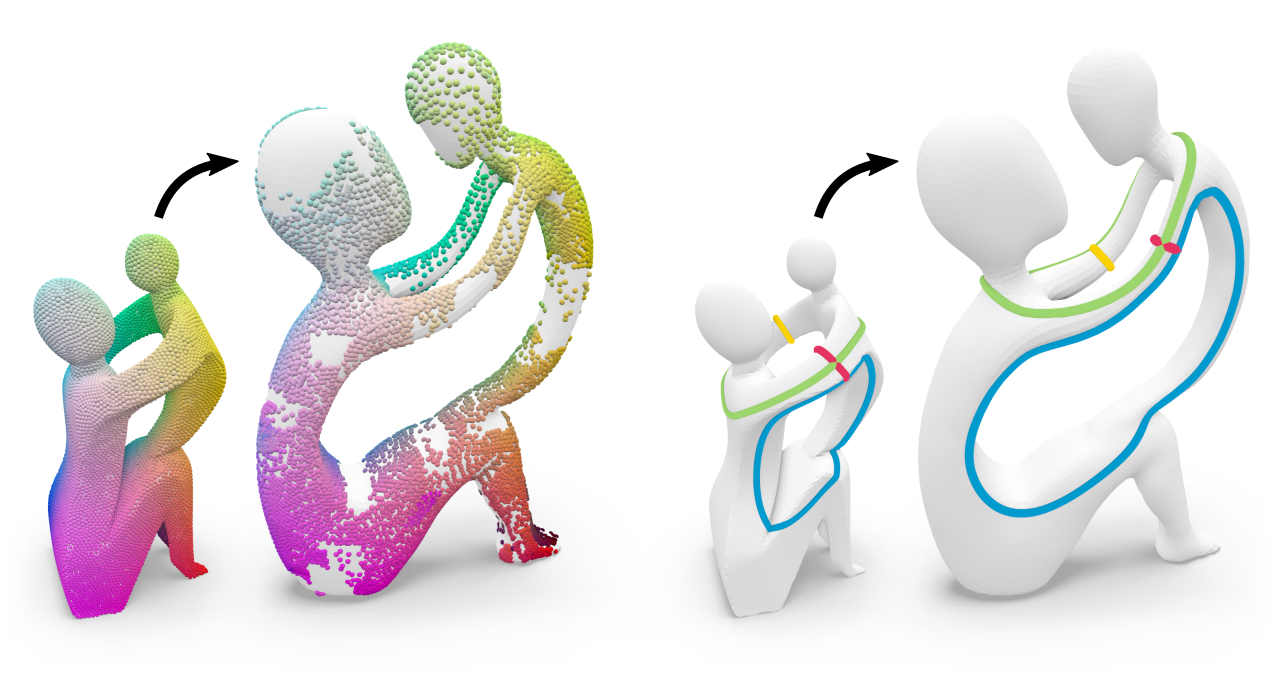
A homeomorphism between two surfaces not only defines a (continuous and bijective) geometric correspondence of points but also (by implication) an identification of topological features, i.e. handles and tunnels, and how the map twists around them. However, in practice, surface maps are often encoded via sparse correspondences or fuzzy representations that merely approximate a homeomorphism and are therefore inherently ambiguous about map topology. In this work, we show a way to infer topological information from an imperfect input map between two shapes. In particular, we compute a homology map, a linear map that transports homology classes of cycles from one surface to the other, subject to a global consistency constraint. Our inference robustly handles imperfect (e.g., partial, sparse, fuzzy, noisy, outlier-ridden, non-injective) input maps and is guaranteed to produce homology maps that are compatible with true homeomorphisms between the input shapes. Homology maps inferred by our method can be directly used to transfer homological information between shapes, or serve as foundation for the construction of a proper homeomorphism guided by the input map, e.g., via compatible surface decomposition.
- Best Paper Award at SGP 2021
- Graphics Replicability Stamp
@article{born2021surface,
title={Surface Map Homology Inference},
author={Born, Janis and Schmidt, Patrick and Campen, Marcel and Kobbelt, Leif},
year={2021},
journal={Computer Graphics Forum},
volume={40},
number={5},
}
Geodesic Distance Computation via Virtual Source Propagation
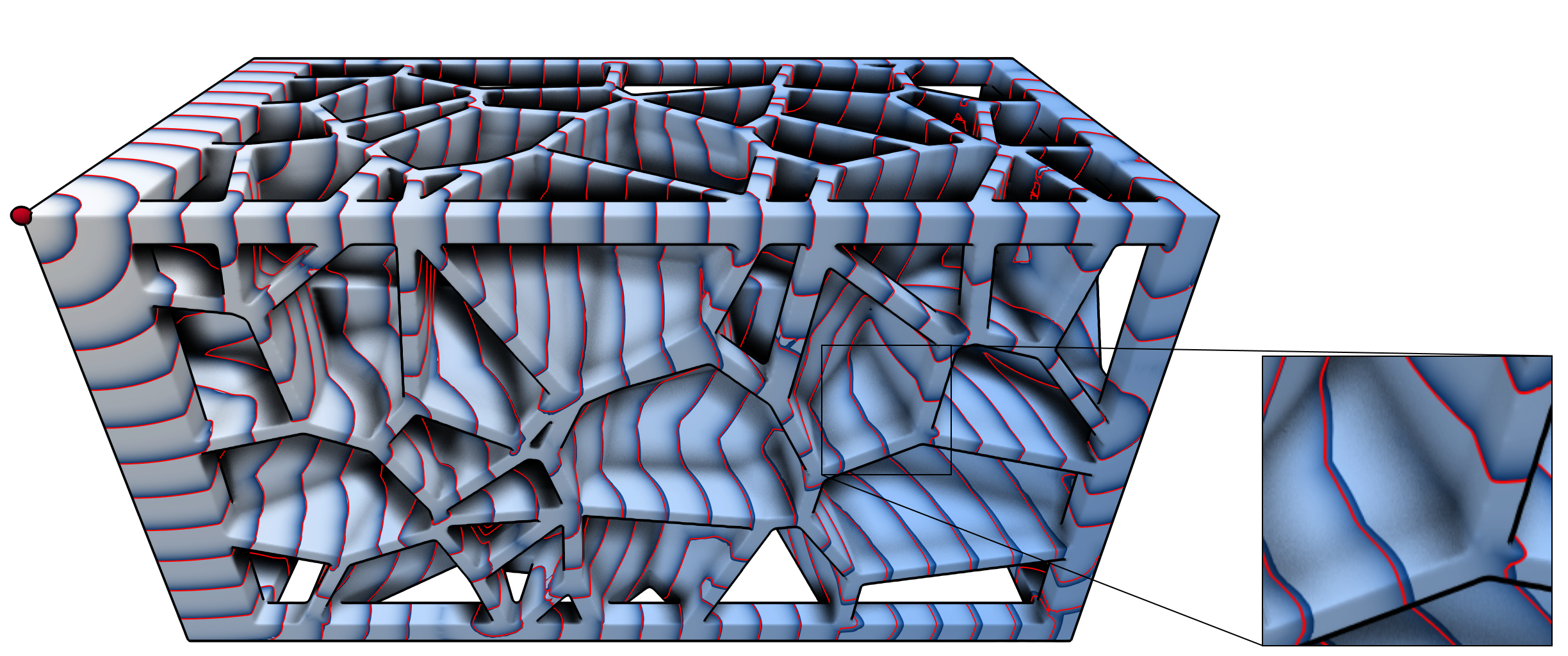
We present a highly practical, efficient, and versatile approach for computing approximate geodesic distances. The method is designed to operate on triangle meshes and a set of point sources on the surface. We also show extensions for all kinds of geometric input including inconsistent triangle soups and point clouds, as well as other source types, such as lines. The algorithm is based on the propagation of virtual sources and hence easy to implement. We extensively evaluate our method on about 10000 meshes taken from the Thingi10k and the Tet Meshing in the Wild data sets. Our approach clearly outperforms previous approximate methods in terms of runtime efficiency and accuracy. Through careful implementation and cache optimization, we achieve runtimes comparable to other elementary mesh operations (e.g. smoothing, curvature estimation) such that geodesic distances become a "first-class citizen" in the toolbox of geometric operations. Our method can be parallelized and we observe up to 6× speed-up on the CPU and 20× on the GPU. We present a number of mesh processing tasks easily implemented on the basis of fast geodesic distances. The source code of our method will be provided as a C++ library under the MIT license.
Note: we are currently in the process of cleaning up and documenting the source code. A basic implementation can already be found in the supplemental material.
Sampling from Quadric-Based CSG Surfaces
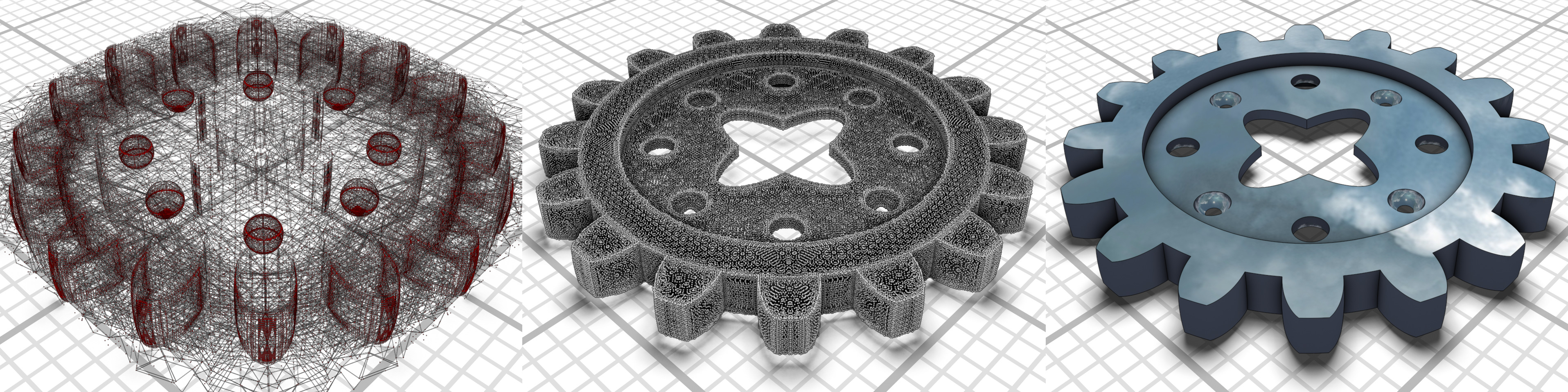
We present an efficient method to create samples directly on surfaces defined by constructive solid geometry (CSG) trees or graphs. The generated samples can be used for visualization or as an approximation to the actual surface with strong guarantees. We chose to use quadric surfaces as CSG primitives as they can model classical primitives such as planes, cubes, spheres, cylinders, and ellipsoids, but also certain saddle surfaces. More importantly, they are closed under affine transformations, a desirable property for a modeling system. We also propose a rendering method that performs local quadric ray-tracing and clipping to achieve pixel-perfect accuracy and hole-free rendering.
Layout Embedding via Combinatorial Optimization
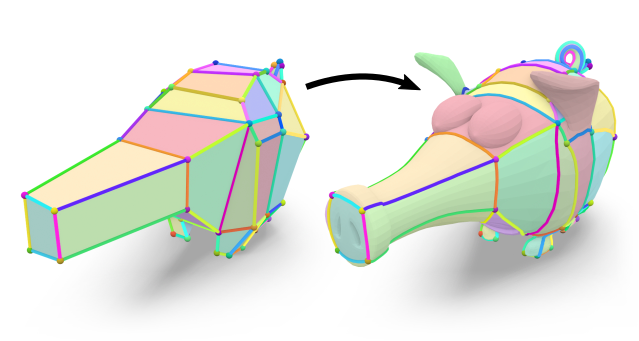
We consider the problem of injectively embedding a given graph connectivity (a layout) into a target surface. Starting from prescribed positions of layout vertices, the task is to embed all layout edges as intersection-free paths on the surface. Besides merely geometric choices (the shape of paths) this problem is especially challenging due to its topological degrees of freedom (how to route paths around layout vertices). The problem is typically addressed through a sequence of shortest path insertions, ordered by a greedy heuristic. Such insertion sequences are not guaranteed to be optimal: Early path insertions can potentially force later paths into unexpected homotopy classes. We show how common greedy methods can easily produce embeddings of dramatically bad quality, rendering such methods unsuitable for automatic processing pipelines. Instead, we strive to find the optimal order of insertions, i.e. the one that minimizes the total path length of the embedding. We demonstrate that, despite the vast combinatorial solution space, this problem can be effectively solved on simply-connected domains via a custom-tailored branch-and-bound strategy. This enables directly using the resulting embeddings in downstream applications which cannot recover from initializations in a wrong homotopy class. We demonstrate the robustness of our method on a shape dataset by embedding a common template layout per category, and show applications in quad meshing and inter-surface mapping.
@article{born2021layout,
title={Layout Embedding via Combinatorial Optimization},
author={Born, Janis and Schmidt, Patrick and Kobbelt, Leif},
year={2021},
journal={Computer Graphics Forum},
volume={40},
number={2},
}
MeTRAbs: Metric-Scale Truncation-Robust Heatmaps for Absolute 3D Human Pose Estimation
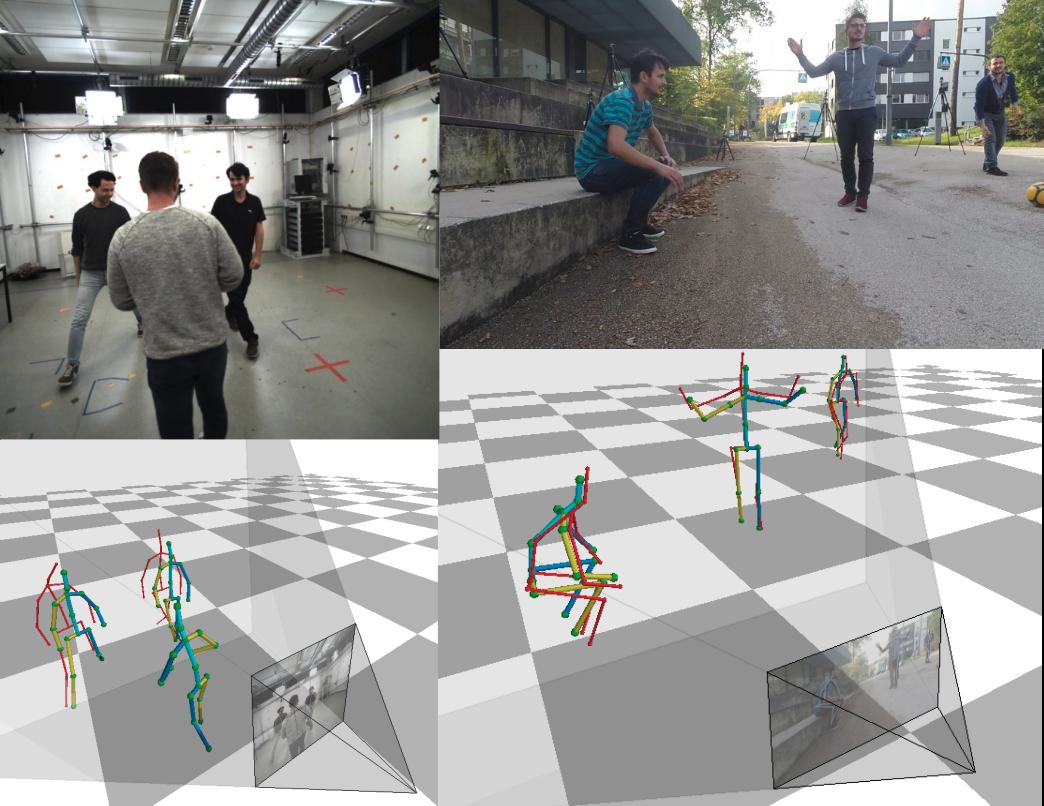
Heatmap representations have formed the basis of human pose estimation systems for many years, and their extension to 3D has been a fruitful line of recent research. This includes 2.5D volumetric heatmaps, whose X and Y axes correspond to image space and Z to metric depth around the subject. To obtain metric-scale predictions, 2.5D methods need a separate post-processing step to resolve scale ambiguity. Further, they cannot localize body joints outside the image boundaries, leading to incomplete estimates for truncated images. To address these limitations, we propose metric-scale truncation-robust (MeTRo) volumetric heatmaps, whose dimensions are all defined in metric 3D space, instead of being aligned with image space. This reinterpretation of heatmap dimensions allows us to directly estimate complete, metric-scale poses without test-time knowledge of distance or relying on anthropometric heuristics, such as bone lengths. To further demonstrate the utility our representation, we present a differentiable combination of our 3D metric-scale heatmaps with 2D image-space ones to estimate absolute 3D pose (our MeTRAbs architecture). We find that supervision via absolute pose loss is crucial for accurate non-root-relative localization. Using a ResNet-50 backbone without further learned layers, we obtain state-of-the-art results on Human3.6M, MPI-INF-3DHP and MuPoTS-3D. Our code is publicly available to facilitate further research.
Winning submission at the ECCV 2020 3D Poses in the Wild Challenge
@article{Sarandi21metrabs,
title={{MeTRAbs:} Metric-Scale Truncation-Robust Heatmaps for Absolute {3D} Human Pose Estimation},
author={S\'ar\'andi, Istv\'an and Linder, Timm and Arras, Kai O. and Leibe, Bastian},
journal={IEEE Transactions on Biometrics, Behavior, and Identity Science},
year={2021},
volume={3},
number={1},
pages={16--30}
}
Accurately Solving Rod Dynamics with Graph Learning
Iterative solvers are widely used to accurately simulate physical systems. These solvers require initial guesses to generate a sequence of improving approximate solutions. In this contribution, we introduce a novel method to accelerate iterative solvers for rod dynamics with graph networks (GNs) by predicting the initial guesses to reduce the number of iterations. Unlike existing methods that aim to learn physical systems in an end-to-end manner, our approach guarantees long-term stability and therefore leads to more accurate solutions. Furthermore, our method improves the run time performance of traditional iterative solvers for rod dynamics. To explore our method we make use of position-based dynamics (PBD) as a common solver for physical systems and evaluate it by simulating the dynamics of elastic rods. Our approach is able to generalize across different initial conditions, discretizations, and realistic material properties. We demonstrate that it also performs well when taking discontinuous effects into account such as collisions between individual rods. Finally, to illustrate the scalability of our approach, we simulate complex 3D tree models composed of over a thousand individual branch segments swaying in wind fields.
@inproceedings{Shao:2021:GraphLearning,
title={Accurately Solving Rod Dynamics with Graph Learning},
author={Han Shao and Tassilo Kugelstadt and Torsten H\"{a}drich and Wojciech Pa\l{}ubicki and Jan Bender and S\"{o}ren Pirk and Dominik L. Michels},
year={2021},
booktitle={Advances in Neural Information Processing Systems (NeurIPS)},
URL={http://computationalsciences.org/publications/shao-2021-physical-systems-graph-learning.html}
}
Fast Corotated Elastic SPH Solids with Implicit Zero-Energy Mode Control
We develop a new operator splitting formulation for the simulation of corotated linearly elastic solids with Smoothed Particle Hydrodynamics (SPH). Based on the technique of Kugelstadt et al. [KKB2018] originally developed for the Finite Element Method (FEM), we split the elastic energy into two separate terms corresponding to stretching and volume conservation, and based on this principle, we design a splitting scheme compatible with SPH. The operator splitting scheme enables us to treat the two terms separately, and because the stretching forces lead to a stiffness matrix that is constant in time, we are able to prefactor the system matrix for the implicit integration step. Solid-solid contact and fluid-solid interaction is achieved through a unified pressure solve. We demonstrate more than an order of magnitude improvement in computation time compared to a state-of-the-art SPH simulator for elastic solids.
We further improve the stability and reliability of the simulation through several additional contributions. We introduce a new implicit penalty mechanism that suppresses zero-energy modes inherent in the SPH formulation for elastic solids, and present a new, physics-inspired sampling algorithm for generating high-quality particle distributions for the rest shape of an elastic solid. We finally also devise an efficient method for interpolating vertex positions of a high-resolution surface mesh based on the SPH particle positions for use in high-fidelity visualization.
@article{KBF+21,
author = {Kugelstadt, Tassilo and Bender, Jan and Fern{\'{a}}ndez-Fern{\'{a}}ndez, Jos{\'{e}} Antonio and Jeske, Stefan Rhys and L{\"{o}}schner, Fabian and Longva, Andreas},
title = {Fast Corotated Elastic SPH Solids with Implicit Zero-Energy Mode Control},
year = {2021},
issue_date = {September 2021},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {4},
number = {3},
url = {https://doi.org/10.1145/3480142},
doi = {10.1145/3480142},
journal = {Proc. ACM Comput. Graph. Interact. Tech.},
month = sep,
articleno = {33},
numpages = {21},
keywords = {Smoothed Particle Hydrodynamics, fluid simulation, deformable solids, solid-fluid coupling}
}
Compression and Rendering of Textured Point Clouds via Sparse Coding

Splat-based rendering techniques produce highly realistic renderings from 3D scan data without prior mesh generation. Mapping high-resolution photographs to the splat primitives enables detailed reproduction of surface appearance. However, in many cases these massive datasets do not fit into GPU memory. In this paper, we present a compression and rendering method that is designed for large textured point cloud datasets. Our goal is to achieve compression ratios that outperform generic texture compression algorithms, while still retaining the ability to efficiently render without prior decompression. To achieve this, we resample the input textures by projecting them onto the splats and create a fixed-size representation that can be approximated by a sparse dictionary coding scheme. Each splat has a variable number of codeword indices and associated weights, which define the final texture as a linear combination during rendering. For further reduction of the memory footprint, we compress geometric attributes by careful clustering and quantization of local neighborhoods. Our approach reduces the memory requirements of textured point clouds by one order of magnitude, while retaining the possibility to efficiently render the compressed data.
Design and Evaluation of a Free-Hand VR-based Authoring Environment for Automated Vehicle Testing

Virtual Reality is increasingly used for safe evaluation and validation of autonomous vehicles by automotive engineers. However, the design and creation of virtual testing environments is a cumbersome process. Engineers are bound to utilize desktop-based authoring tools, and a high level of expertise is necessary. By performing scene authoring entirely inside VR, faster design iterations become possible. To this end, we propose a VR authoring environment that enables engineers to design road networks and traffic scenarios for automated vehicle testing based on free-hand interaction. We present a 3D interaction technique for the efficient placement and selection of virtual objects that is employed on a 2D panel. We conducted a comparative user study in which our interaction technique outperformed existing approaches regarding precision and task completion time. Furthermore, we demonstrate the effectiveness of the system by a qualitative user study with domain experts.
Nominated for the Best Paper Award.
Quad Layouts via Constrained T-Mesh Quantization

We present a robust and fast method for the creation of conforming quad layouts on surfaces. Our algorithm is based on the quantization of a T-mesh, i.e. an assignment of integer lengths to the sides of a non-conforming rectangular partition of the surface. This representation has the benefit of being able to encode an infinite number of layout connectivity options in a finite manner, which guarantees that a valid layout can always be found. We carefully construct the T-mesh from a given seamless parametrization such that the algorithm can provide guarantees on the results' quality. In particular, the user can specify a bound on the angular deviation of layout edges from prescribed directions. We solve an integer linear program (ILP) to find a coarse quad layout adhering to that maximal deviation. Our algorithm is guaranteed to yield a conforming quad layout free of T-junctions together with bounded angle distortion. Our results show that the presented method is fast, reliable, and achieves high quality layouts.
@article{Lyon:2021:Quad,
title = {Quad Layouts via Constrained T-Mesh Quantization},
author = {Lyon, Max and Campen, Marcel and Kobbelt, Leif},
journal = {Computer Graphics Forum},
volume = {40},
number = {2},
year = {2021}
}
Reducing the Annotation Effort for Video Object Segmentation Datasets

For further progress in video object segmentation (VOS), larger, more diverse, and more challenging datasets will be necessary. However, densely labeling every frame with pixel masks does not scale to large datasets. We use a deep convolutional network to automatically create pseudo-labels on a pixel level from much cheaper bounding box annotations and investigate how far such pseudo-labels can carry us for training state-of-the-art VOS approaches. A very encouraging result of our study is that adding a manually annotated mask in only a single video frame for each object is sufficient to generate pseudo-labels which can be used to train a VOS method to reach almost the same performance level as when training with fully segmented videos. We use this workflow to create pixel pseudo-labels for the training set of the challenging tracking dataset TAO, and we manually annotate a subset of the validation set. Together, we obtain the new TAO-VOS benchmark, which we make publicly available at http://www.vision.rwth-aachen.de/page/taovos. While the performance of state-of-the-art methods on existing datasets starts to saturate, TAO-VOS remains very challenging for current algorithms and reveals their shortcomings.
@inproceedings{Voigtlaender21WACV,
title={Reducing the Annotation Effort for Video Object Segmentation Datasets},
author={Paul Voigtlaender and Lishu Luo and Chun Yuan and Yong Jiang and Bastian Leibe},
booktitle={WACV},
year={2021}
}
Poster: Indircet User Guidance by Pedestrians in Virtual Environments

Scene exploration allows users to acquire scene knowledge on entering an unknown virtual environment. To support users in this endeavor, aided wayfinding strategies intentionally influence the user’s wayfinding decisions through, e.g., signs or virtual guides.
Our focus, however, is an unaided wayfinding strategy, in which we use virtual pedestrians as social cues to indirectly and subtly guide users through virtual environments during scene exploration. We shortly outline the required pedestrians’ behavior and results of a first feasibility study indicating the potential of the general approach.
@inproceedings {Boensch2021a,
booktitle = {ICAT-EGVE 2021 - International Conference on Artificial Reality and Telexistence and Eurographics Symposium on Virtual Environments - Posters and Demos},
editor = {Maiero, Jens and Weier, Martin and Zielasko, Daniel},
title = {{Indirect User Guidance by Pedestrians in Virtual Environments}},
author = {Bönsch, Andrea and Güths, Katharina and Ehret, Jonathan and Kuhlen, Torsten W.},
year = {2021},
publisher = {The Eurographics Association},
ISSN = {1727-530X},
ISBN = {978-3-03868-159-5},
DOI = {10.2312/egve.20211336}
}
Poster: Virtual Optical Bench: A VR Learning Tool For Optical Design
The design of optical lens assemblies is a difficult process that requires lots of expertise. The teaching of this process today is done on physical optical benches, which are often too expensive for students to purchase. One way of circumventing these costs is to use software to simulate the optical bench. This work presents a virtual optical bench, which leverages real-time ray tracing in combination with VR rendering to create a teaching tool which creates a repeatable, non-hazardous, and feature-rich learning environment. The resulting application was evaluated in an expert review with 6 optical engineers.
@INPROCEEDINGS{Pape2021,
author = {Pape, Sebastian and Bellgardt, Martin and Gilbert, David and König, Georg and Kuhlen, Torsten W.},
booktitle = {2021 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
title = {Virtual Optical Bench: A VR learning tool for optical design},
year = {2021},
volume ={},
number = {},
pages = {635-636},
doi = {10.1109/VRW52623.2021.00200}
}
Poster: Prosodic and Visual Naturalness of Dialogs Presented by Conversational Virtual Agents
Conversational virtual agents, with and without visual representation, are becoming more present in our daily life, e.g. as intelligent virtual assistants on smart devices. To investigate the naturalness of both the speech and the nonverbal behavior of embodied conversational agents (ECAs), an interdisciplinary research group was initiated, consisting of phoneticians, computer scientists, and acoustic engineers. For a web-based pilot experiment, simple dialogs between a male and a female speaker were created, with three prosodic conditions. For condition 1, the dialog was created synthetically using a text-to-speech engine. In the other two prosodic conditions (2,3) human speakers were recorded with 2) the erroneous accentuation of the text-to-speech synthesis of condition 1, and 3) with a natural accentuation. Face tracking data of the recorded speakers was additionally obtained and applied as input data for the facial animation of the ECAs. Based on the recorded data, auralizations in a virtual acoustic environment were generated and presented as binaural signals to the participants either in combination with the visual representation of the ECAs as short videos or without any visual feedback. A preliminary evaluation of the participants’ responses to questions related to naturalness, presence, and preference is presented in this work.
@inproceedings{Aspoeck2021,
author = {Asp\"{o}ck, Lukas and Ehret, Jonathan and Baumann, Stefan and B\"{o}nsch, Andrea and R\"{o}hr, Christine T. and Grice, Martine and Kuhlen, Torsten W. and Fels, Janina},
title = {Prosodic and Visual Naturalness of Dialogs Presented by Conversational Virtual Agents},
year = {2021},
note = {Hybride Konferenz},
month = {Aug},
date = {2021-08-15},
organization = {47. Jahrestagung für Akustik, Wien (Austria), 15 Aug 2021 - 18 Aug 2021},
url = {https://vr.rwth-aachen.de/publication/02207/}
}
Virtual Reality and Mixed Reality

We are pleased to present in this LNCS volume the scientific proceedings of EuroXR 2021, the 18th EuroXR International Conference, organized by CNR-STIIMA, Italy, which took place during November 24–26, 2021. Due to the COVID-19 pandemic, EuroXR 2021 was held as a virtual conference to guarantee the best audience while maintaining the safest conditions for the attendees. This conference follows a series of successful international conferences initiated in 2004 by the INTUITION Network of Excellence in Virtual and Augmented Reality, supported by the European Commission until 2008. Embedded within the Joint Virtual Reality Conference (JVRC) from 2009 to 2013, it was known as the EuroVR International Conference from 2014 and until last year. The focus of these conferences is to present, each year, novel Virtual Reality (VR) through to Mixed Reality (MR) technologies, also named eXtended Reality (XR), including software systems, immersive rendering technologies, 3D user interfaces, and applications. These conferences aim to foster European engagement between industry, academia, and the public sector, to promote the development and deployment of XR in new and emerging, but also existing, fields. Since 2017, EuroXR (https://www.euroxr-association.org/) has collaborated with Springer to publish the papers of the scientific track of our annual conference. To increase the excellence of this applied research conference, which is basically oriented toward new uses of XR technologies, we established a set of committees including Scientific Program chairs leading an International Program Committee (IPC) made up of international experts in the field. Eight scientific full papers have been selected to be published in the proceedings of EuroXR 2021, presenting original and unpublished papers documenting new XR research contributions, practice and experience, or novel applications. Five long papers and three medium papers were selected from 22 submissions, resulting in an acceptance rate of 36%. Within a double-blind peer reviewing process, three members of the IPC with the help of some external expert reviewers evaluated each submission. From the review reports of the IPC, the Scientific Program chairs took the final decisions. The selected scientific papers are organized in this LNCS volume according to four topical parts: Perception and Cognition, Interactive Techniques, Tracking and Rendering, and Use Case and User Study. Moreover, with the agreement of Springer and for the third year, the last part of this LNCS volume gathers scientific poster/short papers, presenting work in progress or other scientific contributions, such as ideas for unimplemented and/or unusual systems. Within another double-blind peer reviewing process based on two review reports from IPC members for each submission, the Scientific Program chairs selected four scientific poster/short papers from nine submissions (an acceptance rate of 44%). Along with the scientific track, presenting advanced research works (scientific full papers) or research works in progress (scientific poster/short papers) in this LNCS volume, several keynote speakers were invited to EuroXR 2021. Additionally, an application track, subdivided into talk, poster, and demo sessions, was organized for participants to report on the current use of XR technologies in multiple fields. We would like to thank the IPC members and external reviewers for their insightful reviews, which ensured the high quality of the papers selected for the scientific track of EuroXR 2021. Furthermore, we would like to thank the Application chairs, the Demo and Exhibition chairs, and the local organizers of EuroXR 2021. We are also especially grateful to Anna Kramer (Assistant Editor, Computer Science Editorial, Springer) and Volha Shaparava (Springer OCS Support) for their support and advice during the preparation of this LNCS volume.
September 2021
Patrick Bourdot Mariano Alcañiz Raya Pablo Figueroa Victoria Interrante Torsten W. Kuhlen Dirk Reiners
Talk: Numerical Analysis of Keratin Networks in Selected Cell Types

Keratin intermediate filaments make up the main intracellular cytoskeletal network of epithelia and provide, together with their associated desmosomal cell-cell adhesions, mechanical resilience. Remarkable differences in keratin network topology have been noted in different epithelial cell types ranging from a well-defined subapical network in enterocytes to pancytoplasmic networks in keratinocytes. In addition, functional states and biophysical, biochemical, and microbial stress have been shown to affect network organization. To gain insight into the importance of network topology for cellular function and resilience, quantification of 3D keratin network topology is needed.
We used Airyscan superresolution microscopy to record image stacks with an x/y resolution of 120 nm and axial resolution of 350 nm in canine kidney-derived MDCK cells, human epidermal keratinocytes, and murine retinal pigment epithelium (RPE) cells. Established segmentation algorithms (TSOAX) were implemented in combination with additional analysis tools to create a numerical representation of the keratin network topology in the different cell types. The resulting representation contains the XYZ position of all filament segment vertices together with data on filament thickness and information on the connecting nodes. This allows the statistical analysis of network parameters such as length, density, orientation, and mesh size. Furthermore, the network can be rendered in standard 3D software, which makes it accessible at hitherto unattained quality in 3D. Comparison of the three analyzed cell types reveals significant numerical differences in various parameters.
Listening to, and remembering conversations between two talkers: Cognitive research using embodied conversational agents in audiovisual virtual environments

In the AUDICTIVE project about listening to, and remembering the content of conversations between two talkers we aim to investigate the combined effects of potentially performance-relevant but scarcely addressed audiovisual cues on memory and comprehension for running speech. Our overarching methodological approach is to develop an audiovisual Virtual Reality testing environment that includes embodied Virtual Agents (VAs). This testing environment will be used in a series of experiments to research the basic aspects of audiovisual cognitive performance in a close(r)-to-real-life setting. We aim to provide insights into the contribution of acoustical and visual cues on the cognitive performance, user experience, and presence as well as quality and vibrancy of VR applications, especially those with a social interaction focus. We will study the effects of variations in the audiovisual ’realism’ of virtual environments on memory and comprehension of multi-talker conversations and investigate how fidelity characteristics in audiovisual virtual environments contribute to the realism and liveliness of social VR scenarios with embodied VAs. Additionally, we will study the suitability of text memory, comprehension measures, and subjective judgments to assess the quality of experience of a VR environment. First steps of the project with respect to the general idea of AUDICTIVE are presented.
@ inproceedings {Fels2021,
author = {Fels, Janina and Ermert, Cosima A. and Ehret, Jonathan and Mohanathasan, Chinthusa and B\"{o}nsch, Andrea and Kuhlen, Torsten W. and Schlittmeier, Sabine J.},
title = {Listening to, and Remembering Conversations between Two Talkers: Cognitive Research using Embodied Conversational Agents in Audiovisual Virtual Environments},
address = {Berlin},
publisher = {Deutsche Gesellschaft für Akustik e.V. (DEGA)},
pages = {1328-1331},
year = {2021},
booktitle = {[Fortschritte der Akustik - DAGA 2021, DAGA 2021, 2021-08-15 - 2021-08-18, Wien, Austria]},
month = {Aug},
date = {2021-08-15},
organization = {47. Jahrestagung für Akustik, Wien (Austria), 15 Aug 2021 - 18 Aug 2021},
url = {https://vr.rwth-aachen.de/publication/02206/}
}
Talk: Speech Source Directivity for Embodied Conversational Agents

Embodied conversational agents (ECAs) are computer-controlled characters who communicate with a human using natural language. Being represented as virtual humans, ECAs are often utilized in domains such as training, therapy, or guided tours while being embedded in an immersive virtual environment. Having plausible speech sound is thereby desirable to improve the overall plausibility of these virtual-reality-based simulations. In an audiovisual VR experiment, we investigated the impact of directional radiation for the produced speech on the perceived naturalism. Furthermore, we examined how directivity filters influence the perceived social presence of participants in interactions with an ECA. Therefor we varied the source directivity between 1) being omnidirectional, 2) featuring the average directionality of a human speaker, and 3) dynamically adapting to the currently produced phonemes. Our results indicate that directionality of speech is noticed and rated as more natural. However, no significant change of perceived naturalness could be found when adding dynamic, phoneme-dependent directivity. Furthermore, no significant differences on social presence were measurable between any of the three conditions.
Bibtex:
@misc{Ehret2021b,
author = {Ehret, Jonathan and Aspöck, Lukas and B\"{o}nsch, Andrea and Fels, Janina and Kuhlen, Torsten W.},
title = {Speech Source Directivity for Embodied Conversational Agents},
publisher = {IHTA, Institute for Hearing Technology and Acoustics},
year = {2021},
note = {Hybride Konferenz},
month = {Aug},
date = {2021-08-15},
organization = {47. Jahrestagung für Akustik, Wien (Austria), 15 Aug 2021 - 18 Aug 2021},
subtyp = {Video},
url = {https://vr.rwth-aachen.de/publication/02205/}
}
Intuitive Shape Editing in Latent Space
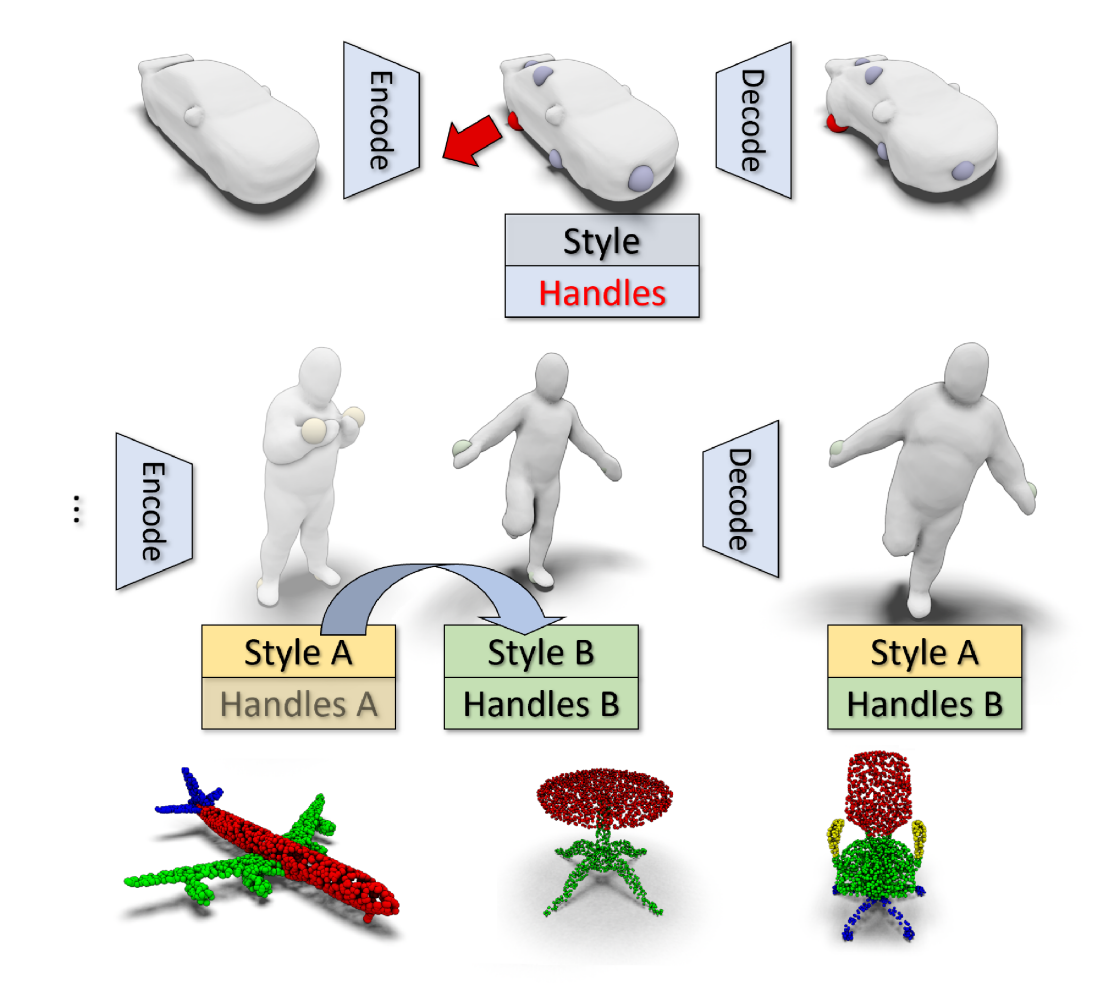
The use of autoencoders for shape editing or generation through latent space manipulation suffers from unpredictable changes in the output shape. Our autoencoder-based method enables intuitive shape editing in latent space by disentangling latent sub-spaces into style variables and control points on the surface that can be manipulated independently. The key idea is adding a Lipschitz-type constraint to the loss function, i.e. bounding the change of the output shape proportionally to the change in latent space, leading to interpretable latent space representations. The control points on the surface that are part of the latent code of an object can then be freely moved, allowing for intuitive shape editing directly in latent space. We evaluate our method by comparing to state-of-the-art data-driven shape editing methods. We further demonstrate the expressiveness of our learned latent space by leveraging it for unsupervised part segmentation.
Person-MinkUNet: 3D Person Detection with LiDAR Point Cloud
In this preliminary work we attempt to apply submanifold sparse convolution to the task of 3D person detection. In particular, we present Person-MinkUNet, a single-stage 3D person detection network based on Minkowski Engine with U-Net architecture. The network achieves a 76.4% average precision (AP) on the JRDB 3D detection benchmark.
Winner of JRDB 3D detection challenge in JRDB-ACT Workshop at CVPR 2021
Fast Exact Booleans for Iterated CSG using Octree-Embedded BSPs
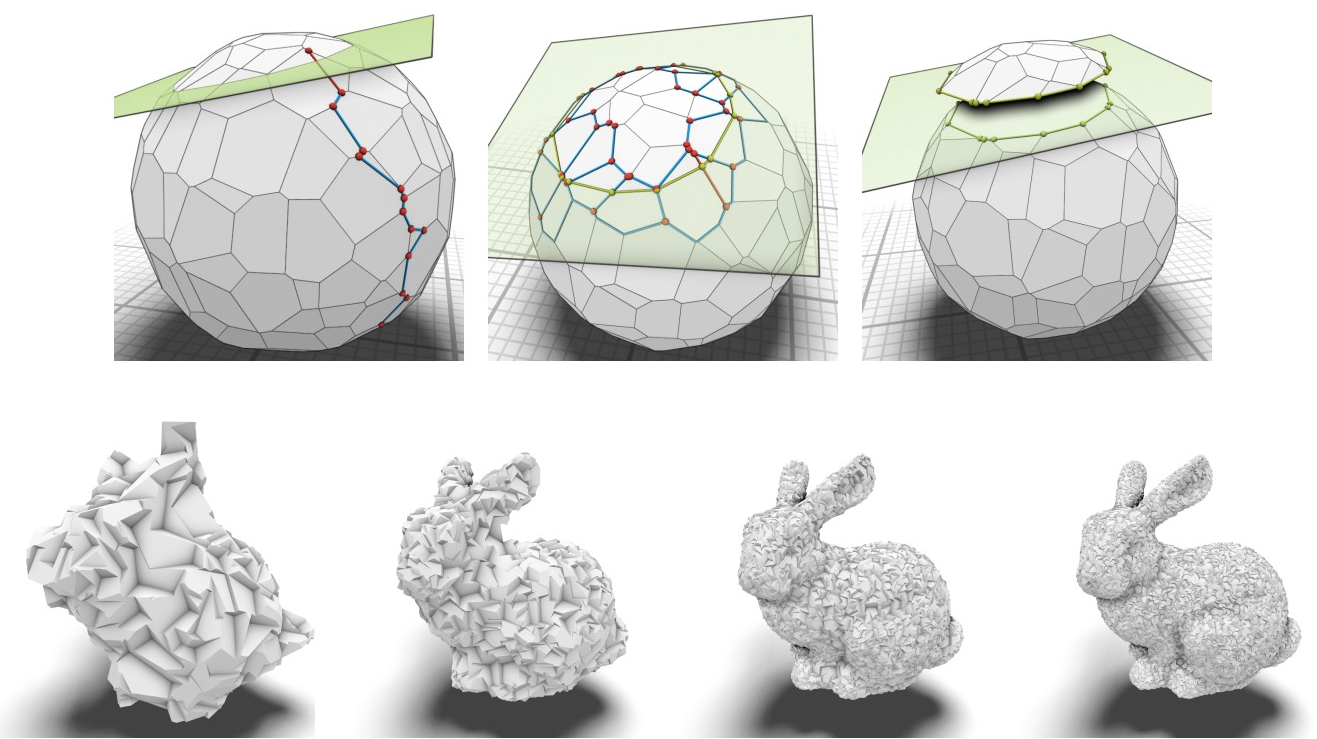
We present octree-embedded BSPs, a volumetric mesh data structure suited for performing a sequence of Boolean operations (iterated CSG) efficiently. At its core, our data structure leverages a plane-based geometry representation and integer arithmetics to guarantee unconditionally robust operations. These typically present considerable performance challenges which we overcome by using custom-tailored fixed-precision operations and an efficient algorithm for cutting a convex mesh against a plane. Consequently, BSP Booleans and mesh extraction are formulated in terms of mesh cutting. The octree is used as a global acceleration structure to keep modifications local and bound the BSP complexity. With our optimizations, we can perform up to 2.5 million mesh-plane cuts per second on a single core, which creates roughly 40-50 million output BSP nodes for CSG. We demonstrate our system in two iterated CSG settings: sweep volumes and a milling simulation.
@article{NEHRINGWIRXEL2021103015,
title = {Fast Exact Booleans for Iterated CSG using Octree-Embedded BSPs},
journal = {Computer-Aided Design},
volume = {135},
pages = {103015},
year = {2021},
issn = {0010-4485},
doi = {https://doi.org/10.1016/j.cad.2021.103015},
url = {https://www.sciencedirect.com/science/article/pii/S0010448521000269},
author = {Julius Nehring-Wirxel and Philip Trettner and Leif Kobbelt},
keywords = {Plane-based geometry, CSG, Mesh Booleans, BSP, Octree, Integer arithmetic},
abstract = {We present octree-embedded BSPs, a volumetric mesh data structure suited for performing a sequence of Boolean operations (iterated CSG) efficiently. At its core, our data structure leverages a plane-based geometry representation and integer arithmetics to guarantee unconditionally robust operations. These typically present considerable performance challenges which we overcome by using custom-tailored fixed-precision operations and an efficient algorithm for cutting a convex mesh against a plane. Consequently, BSP Booleans and mesh extraction are formulated in terms of mesh cutting. The octree is used as a global acceleration structure to keep modifications local and bound the BSP complexity. With our optimizations, we can perform up to 2.5 million mesh-plane cuts per second on a single core, which creates roughly 40-50 million output BSP nodes for CSG. We demonstrate our system in two iterated CSG settings: sweep volumes and a milling simulation.}
}
Self-Supervised Person Detection in 2D Range Data using a Calibrated Camera
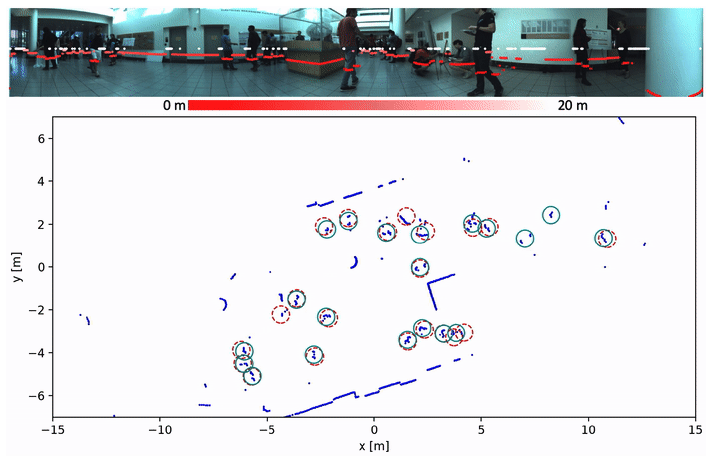
Deep learning is the essential building block of state-of-the-art person detectors in 2D range data. However, only a few annotated datasets are available for training and testing these deep networks, potentially limiting their performance when deployed in new environments or with different LiDAR models. We propose a method, which uses bounding boxes from an image-based detector (e.g. Faster R-CNN) on a calibrated camera to automatically generate training labels (called pseudo-labels) for 2D LiDAR-based person detectors. Through experiments on the JackRabbot dataset with two detector models, DROW3 and DR-SPAAM, we show that self- supervised detectors, trained or fine-tuned with pseudo-labels, outperform detectors trained using manual annotations from a different dataset. Combined with robust training techniques, the self-supervised detectors reach a performance close to the ones trained using manual annotations. Our method is an effective way to improve person detectors during deployment without any additional labeling effort, and we release our source code to support relevant robotic applications.
HOTA: A Higher Order Metric for Evaluating Multi-object Tracking
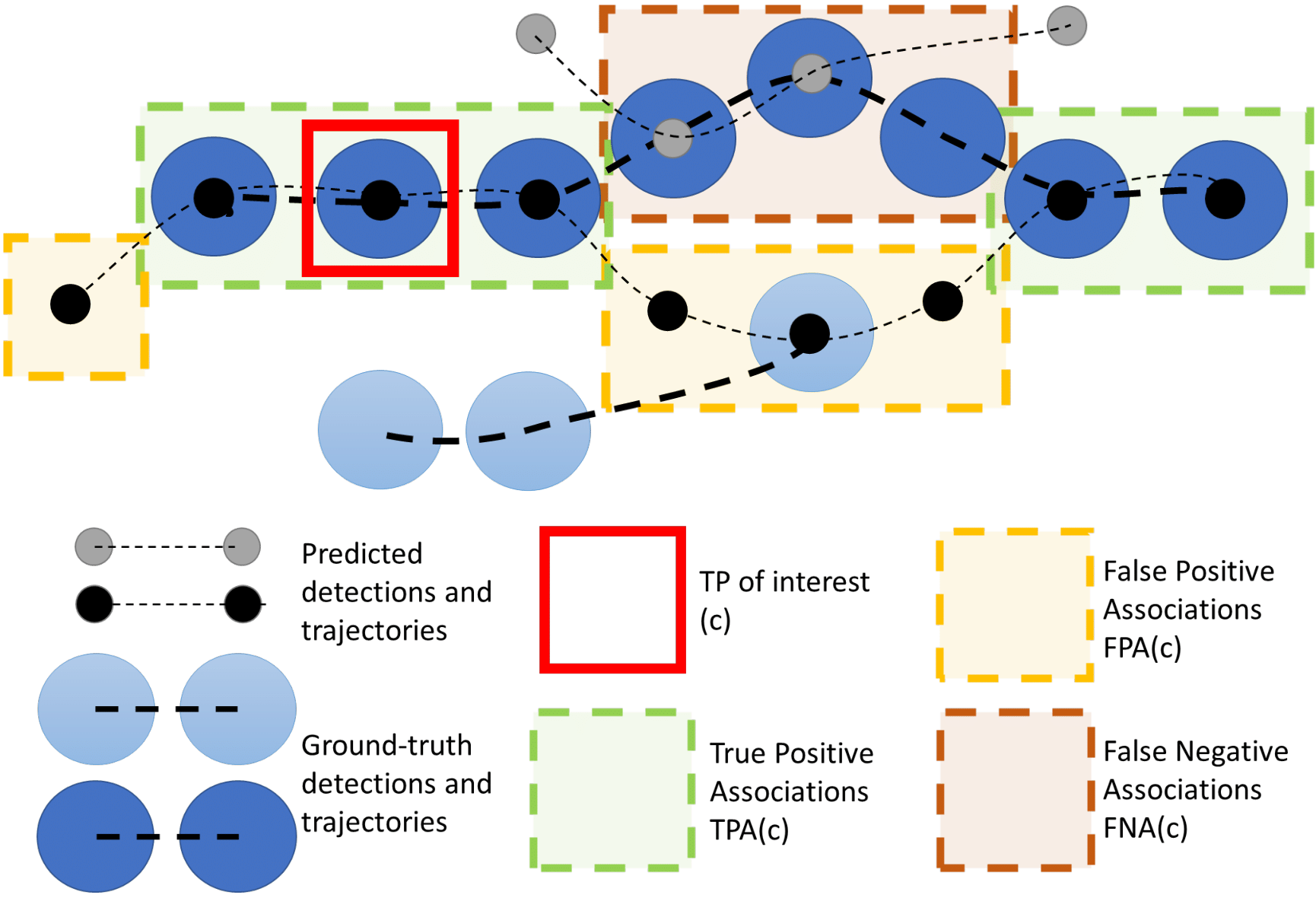
Multi-object tracking (MOT) has been notoriously difficult to evaluate. Previous metrics overemphasize the importance of either detection or association. To address this, we present a novel MOT evaluation metric, higher order tracking accuracy (HOTA), which explicitly balances the effect of performing accurate detection, association and localization into a single unified metric for comparing trackers. HOTA decomposes into a family of sub-metrics which are able to evaluate each of five basic error types separately, which enables clear analysis of tracking performance. We evaluate the effectiveness of HOTA on the MOTChallenge benchmark, and show that it is able to capture important aspects of MOT performance not previously taken into account by established metrics. Furthermore, we show HOTA scores better align with human visual evaluation of tracking performance.
@article{luiten2020IJCV,
title={HOTA: A Higher Order Metric for Evaluating Multi-Object Tracking},
author={Luiten, Jonathon and Osep, Aljosa and Dendorfer, Patrick and Torr, Philip and Geiger, Andreas and Leal-Taix{\'e}, Laura and Leibe, Bastian},
journal={International Journal of Computer Vision},
pages={1--31},
year={2020},
publisher={Springer}
}
Continuous Adaptation for Interactive Object Segmentation by Learning from Corrections

In interactive object segmentation a user collaborates with a computer vision model to segment an object. Recent works employ convolutional neural networks for this task: Given an image and a set of corrections made by the user as input, they output a segmentation mask. These approaches achieve strong performance by training on large datasets but they keep the model parameters unchanged at test time. Instead, we recognize that user corrections can serve as sparse training examples and we propose a method that capitalizes on that idea to update the model parameters on-the-fly to the data at hand. Our approach enables the adaptation to a particular object and its background, to distributions shifts in a test set, to specific object classes, and even to large domain changes, where the imaging modality changes between training and testing. We perform extensive experiments on 8 diverse datasets and show: Compared to a model with frozen parameters, our method reduces the required corrections (i) by 9%-30% when distribution shifts are small between training and testing; (ii) by 12%-44% when specializing to a specific class; (iii) and by 60% and 77% when we completely change domain between training and testing.
@inproceedings{Kontogianni20ECCV,
title={Continuous Adaptation for Interactive Object Segmentation by Learning from Corrections},
author={ Kontogianni, Theodora and Gygli, Michael and Uijlings, Jasper and Ferrari, Vittorio},
booktitle=ECCV,
year={2020}
}
Higher-Order Finite Elements for Embedded Simulation
As demands for high-fidelity physics-based animations increase, the need for accurate methods for simulating deformable solids grows. While higher-order finite elements are commonplace in engineering due to their superior approximation properties for many problems, they have gained little traction in the computer graphics community. This may partially be explained by the need for finite element meshes to approximate the highly complex geometry of models used in graphics applications. Due to the additional per-element computational expense of higher-order elements, larger elements are needed, and the error incurred due to the geometry mismatch eradicates the benefits of higher-order discretizations. One solution to this problem is the embedding of the geometry into a coarser finite element mesh. However, to date there is no adequate, practical computational framework that permits the accurate embedding into higher-order elements.
We develop a novel, robust quadrature generation method that generates theoretically guaranteed high-quality sub-cell integration rules of arbitrary polynomial accuracy. The number of quadrature points generated is bounded only by the desired degree of the polynomial, independent of the embedded geometry. Additionally, we build on recent work in the Finite Cell Method (FCM) community so as to tackle the severe ill-conditioning caused by partially filled elements by adapting an Additive-Schwarz-based preconditioner so that it is suitable for use with state-of-the-art non-linear material models from the graphics literature. Together these two contributions constitute a general-purpose framework for embedded simulation with higher-order finite elements.
We finally demonstrate the benefits of our framework in several scenarios, in which second-order hexahedra and tetrahedra clearly outperform their first-order counterparts.
@ARTICLE{ LLKFB20,
author= {Andreas Longva and Fabian L{\"{o}}schner and Tassilo Kugelstadt and Jos{\'{e}} Antonio Fern{\'{a}}ndez-Fern{\'{a}}ndez and Jan Bender },
title= {{Higher-Order Finite Elements for Embedded Simulation}},
year= {2020},
journal= {ACM Transactions on Graphics (SIGGRAPH Asia)},
publisher= {ACM},
volume = {39},
number = {6},
pages= {14}
}
STEm-Seg: Spatio-temporal Embeddings for Instance Segmentation in Videos
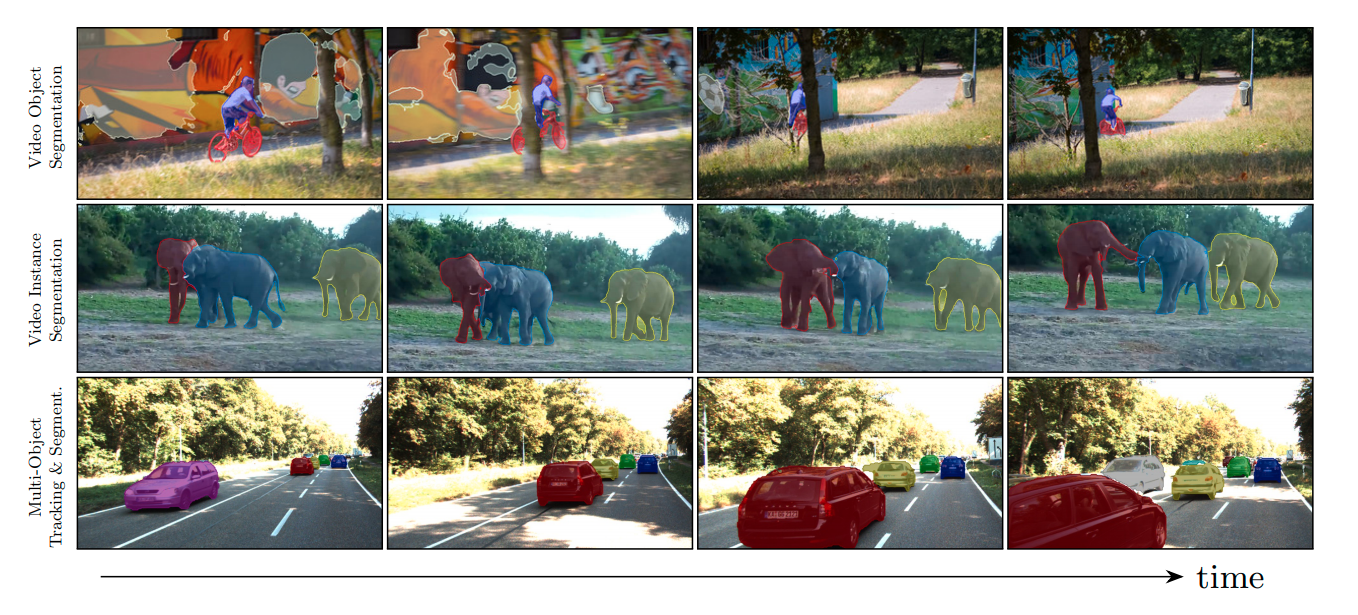
Existing methods for instance segmentation in videos typically involve multi-stage pipelines that follow the tracking-by-detection paradigm and model a video clip as a sequence of images. Multiple networks are used to detect objects in individual frames, and then associate these detections over time. Hence, these methods are often non-end-to-end trainable and highly tailored to specific tasks. In this paper, we propose a different approach that is well-suited to a variety of tasks involving instance segmentation in videos. In particular, we model a video clip as a single 3D spatio-temporal volume, and propose a novel approach that segments and tracks instances across space and time in a single stage. Our problem formulation is centered around the idea of spatio-temporal embeddings which are trained to cluster pixels belonging to a specific object instance over an entire video clip. To this end, we introduce (i) novel mixing functions that enhance the feature representation of spatio-temporal embeddings, and (ii) a single-stage, proposal-free network that can reason about temporal context. Our network is trained end-to-end to learn spatio-temporal embeddings as well as parameters required to cluster these embeddings, thus simplifying inference. Our method achieves state-of-the-art results across multiple datasets and tasks.
@inproceedings{AtharMahadevan20ECCV,
title={STEm-Seg: Spatio-temporal Embeddings for Instance Segmentation in Videos},
author={Athar, Ali and Mahadevan, Sabarinath and O{\v{s}}ep, Aljo{\v{s}}a and Leal-Taix{\'e}, Laura and Leibe, Bastian},
booktitle=ECCV,
year={2020}
}
Inter-Surface Maps via Constant-Curvature Metrics
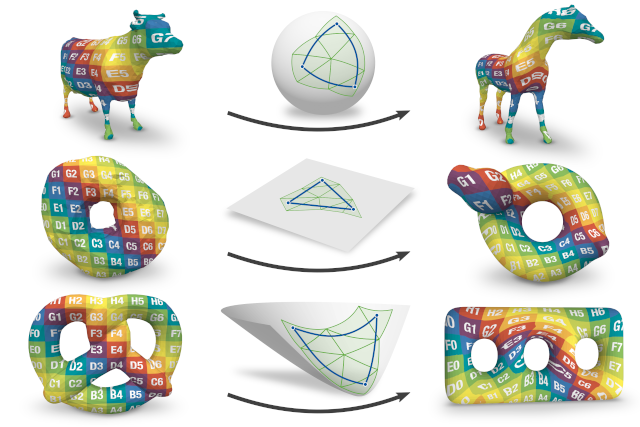
We propose a novel approach to represent maps between two discrete surfaces of the same genus and to minimize intrinsic mapping distortion. Our maps are well-defined at every surface point and are guaranteed to be continuous bijections (surface homeomorphisms). As a key feature of our approach, only the images of vertices need to be represented explicitly, since the images of all other points (on edges or in faces) are properly defined implicitly. This definition is via unique geodesics in metrics of constant Gaussian curvature. Our method is built upon the fact that such metrics exist on surfaces of arbitrary topology, without the need for any cuts or cones (as asserted by the uniformization theorem). Depending on the surfaces' genus, these metrics exhibit one of the three classical geometries: Euclidean, spherical or hyperbolic. Our formulation handles constructions in all three geometries in a unified way. In addition, by considering not only the vertex images but also the discrete metric as degrees of freedom, our formulation enables us to simultaneously optimize the images of these vertices and images of all other points.
@article{schmidt2020intersurface,
author = {Schmidt, Patrick and Campen, Marcel and Born, Janis and Kobbelt, Leif},
title = {Inter-Surface Maps via Constant-Curvature Metrics},
journal = {ACM Transactions on Graphics},
issue_date = {July 2020},
volume = {39},
number = {4},
month = jul,
year = {2020},
articleno = {119},
url = {https://doi.org/10.1145/3386569.3392399},
doi = {10.1145/3386569.3392399},
publisher = {ACM},
address = {New York, NY, USA},
}
3D-MPA: Multi Proposal Aggregation for 3D Semantic Instance Segmentation
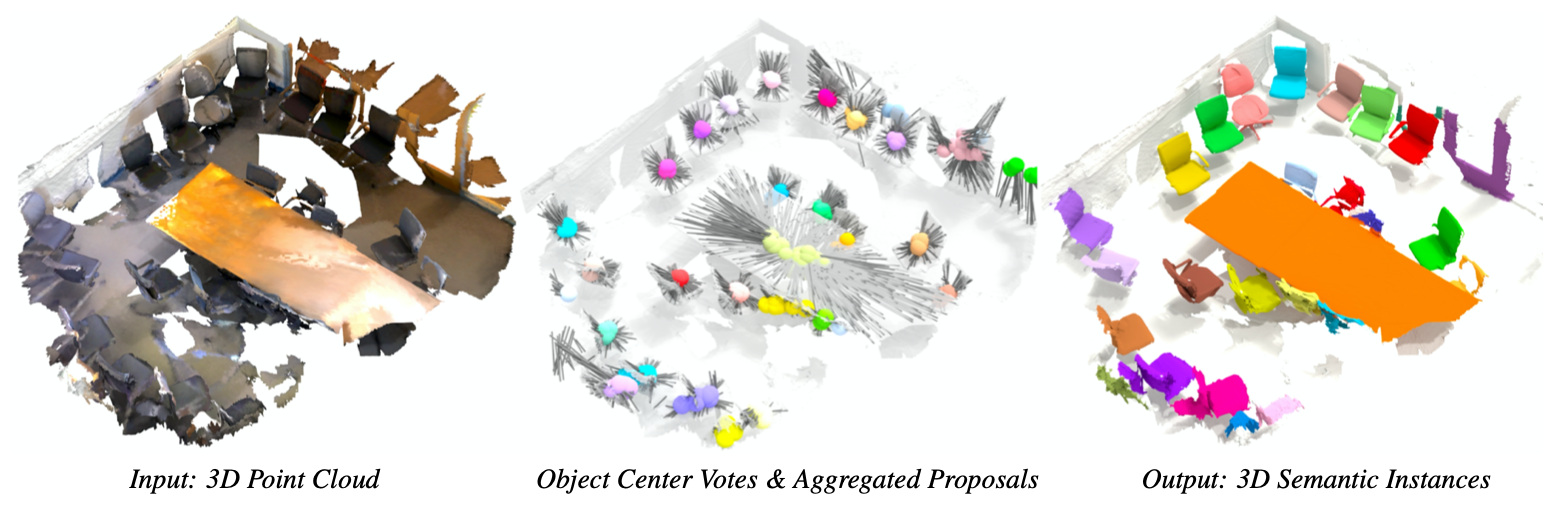
We present 3D-MPA, a method for instance segmentation on 3D point clouds. Given an input point cloud, we propose an object-centric approach where each point votes for its object center. We sample object proposals from the predicted object centers. Then we learn proposal features from grouped point features that voted for the same object center. A graph convolutional network introduces inter-proposal relations, providing higher-level feature learning in addition to the lower-level point features. Each proposal comprises a semantic label, a set of associated points over which we define a foreground-background mask, an objectness score and aggregation features. Previous works usually perform non-maximum-suppression (NMS) over proposals to obtain the final object detections or semantic instances. However, NMS can discard potentially correct predictions. Instead, our approach keeps all proposals and groups them together based on the learned aggregation features. We show that grouping proposals improves over NMS and outperforms previous state-of-the-art methods on the tasks of 3D object detection and semantic instance segmentation on the ScanNetV2 benchmark and the S3DIS dataset.
@inproceedings{Engelmann20CVPR,
title = {{3D-MPA: Multi Proposal Aggregation for 3D Semantic Instance Segmentation}},
author = {Engelmann, Francis and Bokeloh, Martin and Fathi, Alireza and Leibe, Bastian and Nie{\ss}ner, Matthias},
booktitle = {{IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}},
year = {2020}
}
DualConvMesh-Net: Joint Geodesic and Euclidean Convolutions on 3D Meshes
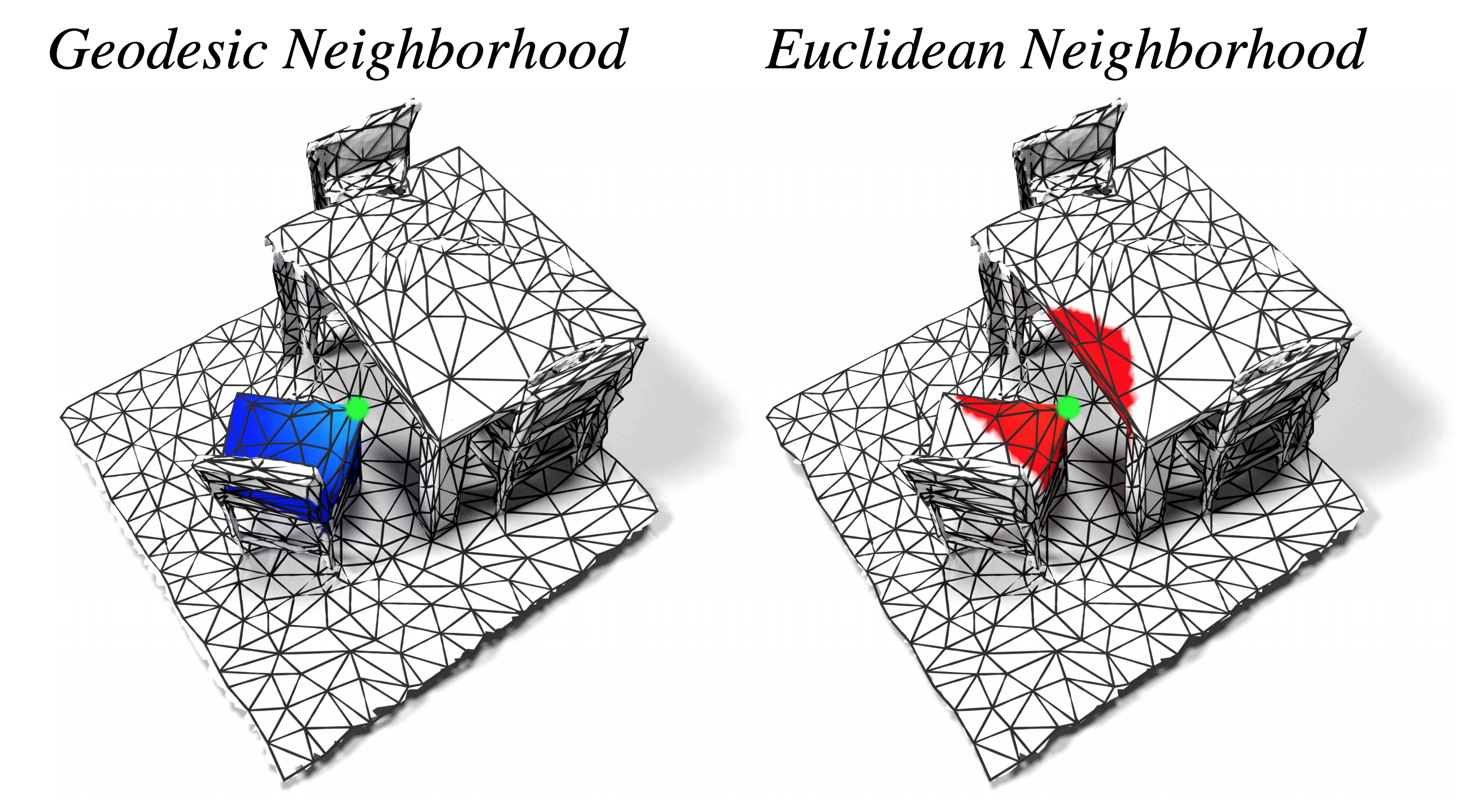
We propose DualConvMesh-Nets (DCM-Net) a family of deep hierarchical convolutional networks over 3D geometric data that combines two types of convolutions. The first type, geodesic convolutions, defines the kernel weights over mesh surfaces or graphs. That is, the convolutional kernel weights are mapped to the local surface of a given mesh. The second type, Euclidean convolutions, is independent of any underlying mesh structure. The convolutional kernel is applied on a neighborhood obtained from a local affinity representation based on the Euclidean distance between 3D points. Intuitively, geodesic convolutions can easily separate objects that are spatially close but have disconnected surfaces, while Euclidean convolutions can represent interactions between nearby objects better, as they are oblivious to object surfaces. To realize a multi-resolution architecture, we borrow well-established mesh simplification methods from the geometry processing domain and adapt them to define mesh-preserving pooling and unpooling operations. We experimentally show that combining both types of convolutions in our architecture leads to significant performance gains for 3D semantic segmentation, and we report competitive results on three scene segmentation benchmarks.
@inproceedings{Schult20CVPR,
author = {Jonas Schult* and
Francis Engelmann* and
Theodora Kontogianni and
Bastian Leibe},
title = {{DualConvMesh-Net: Joint Geodesic and Euclidean Convolutions on 3D Meshes}},
booktitle = {{IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}},
year = {2020}
}
Siam R-CNN: Visual Tracking by Re-Detection
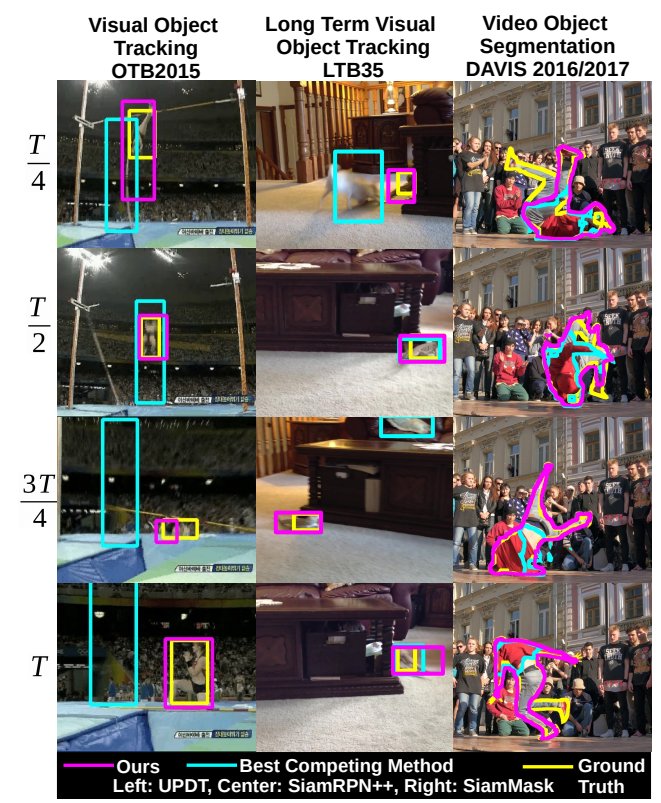
We present Siam R-CNN, a Siamese re-detection architecture which unleashes the full power of two-stage object detection approaches for visual object tracking. We combine this with a novel tracklet-based dynamic programming algorithm, which takes advantage of re-detections of both the first-frame template and previous-frame predictions, to model the full history of both the object to be tracked and potential distractor objects. This enables our approach to make better tracking decisions, as well as to re-detect tracked objects after long occlusion. Finally, we propose a novel hard example mining strategy to improve Siam RCNN’s robustness to similar looking objects. The proposed tracker achieves the current best performance on ten tracking benchmarks, with especially strong results for long-term tracking.
@inproceedings{Voigtlaender20CVPR,
title={Siam R-CNN: Visual Tracking by Re-Detection},
author={Paul Voigtlaender and Jonathon Luiten and Philip H. S. Torr and Bastian Leibe},
year={2020},
booktitle={CVPR},
}
Making a Case for 3D Convolutions for Object Segmentation in Videos
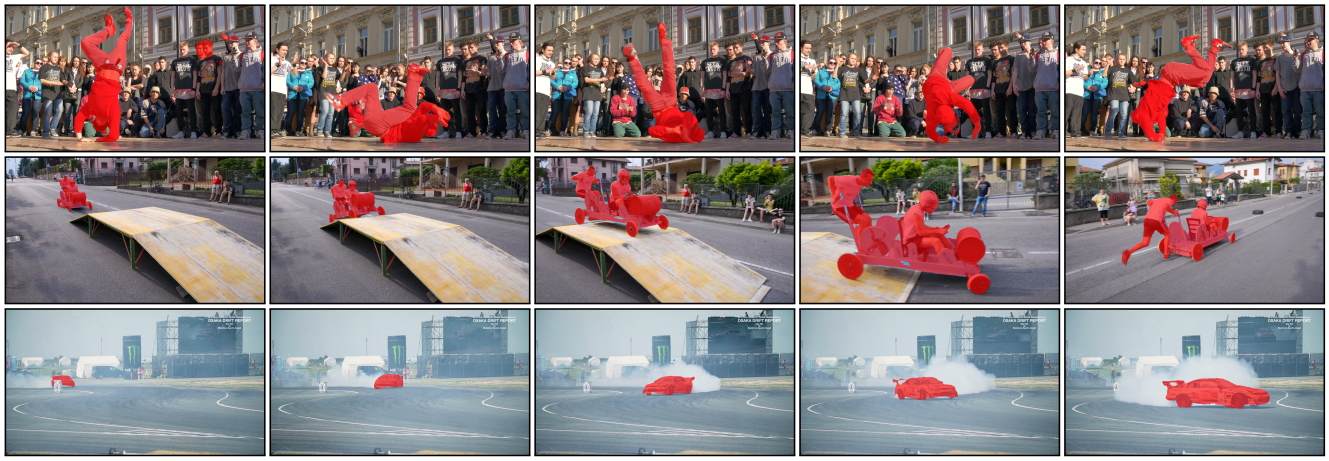
The task of object segmentation in videos is usually accomplished by processing appearance and motion information separately using standard 2D convolutional networks, followed by a learned fusion of the two sources of information. On the other hand, 3D convolutional networks have been successfully applied for video classification tasks, but have not been leveraged as effectively to problems involving dense per-pixel interpretation of videos compared to their 2D convolutional counterparts and lag behind the aforementioned networks in terms of performance. In this work, we show that 3D CNNs can be effectively applied to dense video prediction tasks such as salient object segmentation. We propose a simple yet effective encoder-decoder network architecture consisting entirely of 3D convolutions that can be trained end-to-end using a standard cross-entropy loss. To this end, we leverage an efficient 3D encoder, and propose a 3D decoder architecture, that comprises novel 3D Global Convolution layers and 3D Refinement modules. Our approach outperforms existing state-of-the-arts by a large margin on the DAVIS'16 Unsupervised, FBMS and ViSal dataset benchmarks in addition to being faster, thus showing that our architecture can efficiently learn expressive spatio-temporal features and produce high quality video segmentation masks.
@inproceedings{Mahadevan20BMVC,
title={Making a Case for 3D Convolutions for Object Segmentation in Videos},
author={Mahadevan, Sabarinath and Athar, Ali and O{\v{s}}ep, Aljo{\v{s}}a and Hennen, Sebastian and Leal-Taix{\'e}, Laura and Leibe, Bastian},
booktitle={BMVC},
year={2020}
}
Implicit Frictional Boundary Handling for SPH
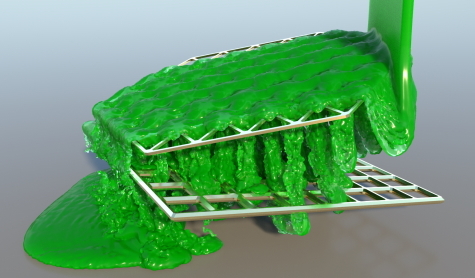
In this paper, we present a novel method for the robust handling of static and dynamic rigid boundaries in Smoothed Particle Hydrodynamics (SPH) simulations. We build upon the ideas of the density maps approach which has been introduced recently by Koschier and Bender. They precompute the density contributions of solid boundaries and store them on a spatial grid which can be efficiently queried during runtime. This alleviates the problems of commonly used boundary particles, like bumpy surfaces and inaccurate pressure forces near boundaries. Our method is based on a similar concept but we precompute the volume contribution of the boundary geometry. This maintains all benefits of density maps but offers a variety of advantages which are demonstrated in several experiments. Firstly, in contrast to the density maps method we can compute derivatives in the standard SPH manner by differentiating the kernel function. This results in smooth pressure forces, even for lower map resolutions, such that precomputation times and memory requirements are reduced by more than two orders of magnitude compared to density maps. Furthermore, this directly fits into the SPH concept so that volume maps can be seamlessly combined with existing SPH methods. Finally, the kernel function is not baked into the map such that the same volume map can be used with different kernels. This is especially useful when we want to incorporate common surface tension or viscosity methods that use different kernels than the fluid simulation.
@Article{BKWK2020,
author = {Jan Bender and Tassilo Kugelstadt and Marcel Weiler and Dan Koschier },
title = {Implicit Frictional Boundary Handling for SPH},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2020},
publisher = {IEEE},
volume={26},
number={10},
pages={2982-2993},
doi={10.1109/TVCG.2020.3004245},
}
Dilated Point Convolutions: On the Receptive Field Size of Point Convolutions on 3D Point Clouds
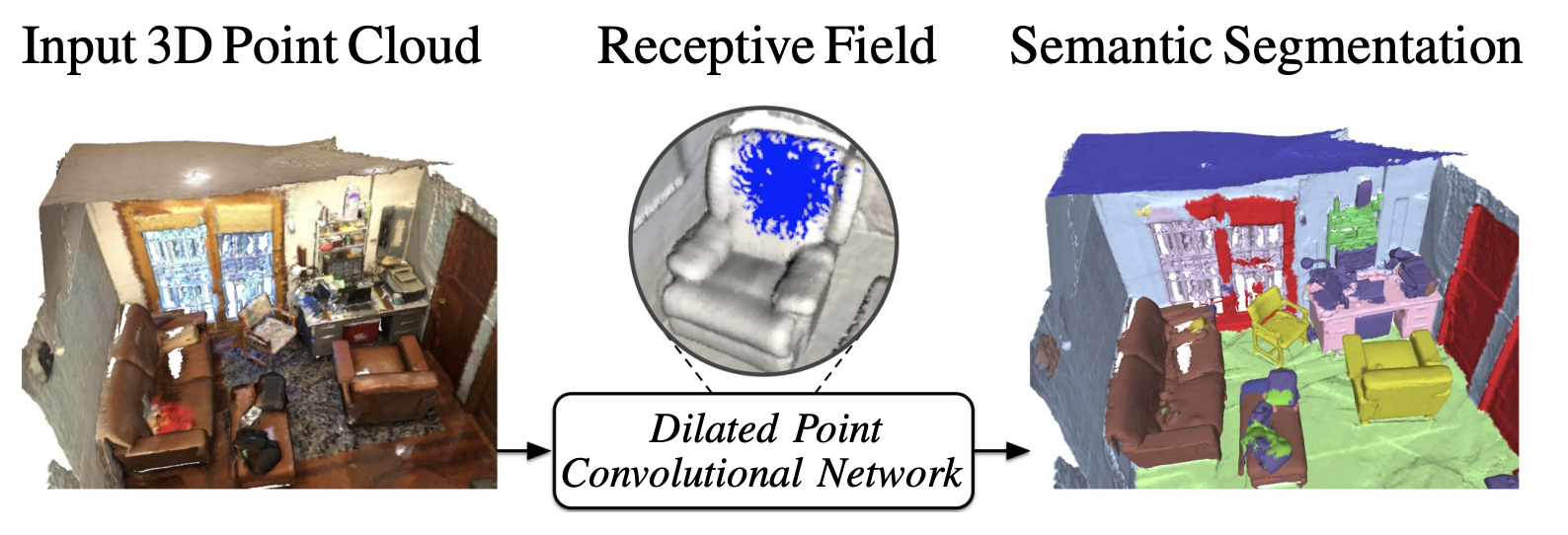
In this work, we propose Dilated Point Convolutions (DPC). In a thorough ablation study, we show that the receptive field size is directly related to the performance of 3D point cloud processing tasks, including semantic segmentation and object classification. Point convolutions are widely used to efficiently process 3D data representations such as point clouds or graphs. However, we observe that the receptive field size of recent point convolutional networks is inherently limited. Our dilated point convolutions alleviate this issue, they significantly increase the receptive field size of point convolutions. Importantly, our dilation mechanism can easily be integrated into most existing point convolutional networks. To evaluate the resulting network architectures, we visualize the receptive field and report competitive scores on popular point cloud benchmarks.
@inproceedings{Engelmann20ICRA,
author = {Engelmann, Francis and Kontogianni, Theodora and Leibe, Bastian},
title = {{Dilated Point Convolutions: On the Receptive Field Size of Point Convolutions on 3D Point Clouds}},
booktitle = {{International Conference on Robotics and Automation (ICRA)}},
year = {2020}
}
Track to Reconstruct and Reconstruct to Track
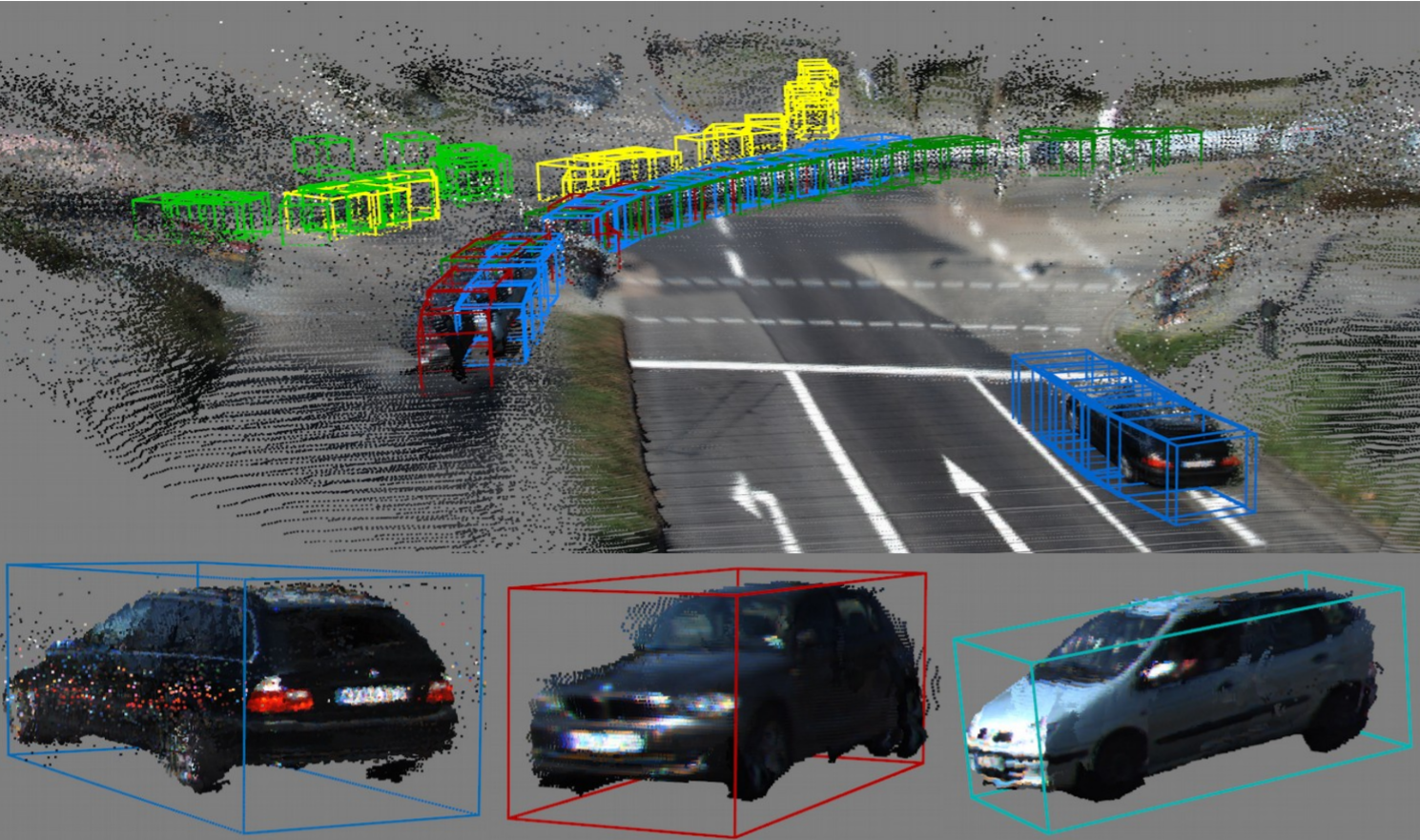
Object tracking and 3D reconstruction are often performed together, with tracking used as input for reconstruction. However, the obtained reconstructions also provide useful information for improving tracking. We propose a novel method that closes this loop, first tracking to reconstruct, and then reconstructing to track. Our approach, MOTSFusion (Multi-Object Tracking, Segmentation and dynamic object Fusion), exploits the 3D motion extracted from dynamic object reconstructions to track objects through long periods of complete occlusion and to recover missing detections. Our approach first builds up short tracklets using 2D optical flow, and then fuses these into dynamic 3D object reconstructions. The precise 3D object motion of these reconstructions is used to merge tracklets through occlusion into long-term tracks, and to locate objects when detections are missing. On KITTI, our reconstruction-based tracking reduces the number of ID switches of the initial tracklets by more than 50%, and outperforms all previous approaches for both bounding box and segmentation tracking.
@article{luiten2020track,
title={Track to Reconstruct and Reconstruct to Track},
author={Luiten, Jonathon and Fischer, Tobias and Leibe, Bastian},
journal={IEEE Robotics and Automation Letters},
volume={5},
number={2},
pages={1803--1810},
year={2020},
publisher={IEEE}
}
UnOVOST: Unsupervised Offline Video Object Segmentation and Tracking

We address Unsupervised Video Object Segmentation (UVOS), the task of automatically generating accurate pixel masks for salient objects in a video sequence and of tracking these objects consistently through time, without any input about which objects should be tracked. Towards solving this task, we present UnOVOST (Unsupervised Offline Video Object Segmentation and Tracking) as a simple and generic algorithm which is able to track and segment a large variety of objects. This algorithm builds up tracks in a number stages, first grouping segments into short tracklets that are spatio-temporally consistent, before merging these tracklets into long-term consistent object tracks based on their visual similarity. In order to achieve this we introduce a novel tracklet-based Forest Path Cutting data association algorithm which builds up a decision forest of track hypotheses before cutting this forest into paths that form long-term consistent object tracks. When evaluating our approach on the DAVIS 2017 Unsupervised dataset we obtain state-of-the-art performance with a mean J &F score of 67.9% on the val, 58% on the test-dev and 56.4% on the test-challenge benchmarks, obtaining first place in the DAVIS 2019 Unsupervised Video Object Segmentation Challenge. UnOVOST even performs competitively with many semi-supervised video object segmentation algorithms even though it is not given any input as to which objects should be tracked and segmented.
@inproceedings{luiten2020unovost,
title={UnOVOST: Unsupervised Offline Video Object Segmentation and Tracking},
author={Luiten, Jonathon and Zulfikar, Idil Esen and Leibe, Bastian},
booktitle={Proceedings of the IEEE Winter Conference on Applications in Computer Vision},
year={2020}
}
Metric-Scale Truncation-Robust Heatmaps for 3D Human Pose Estimation
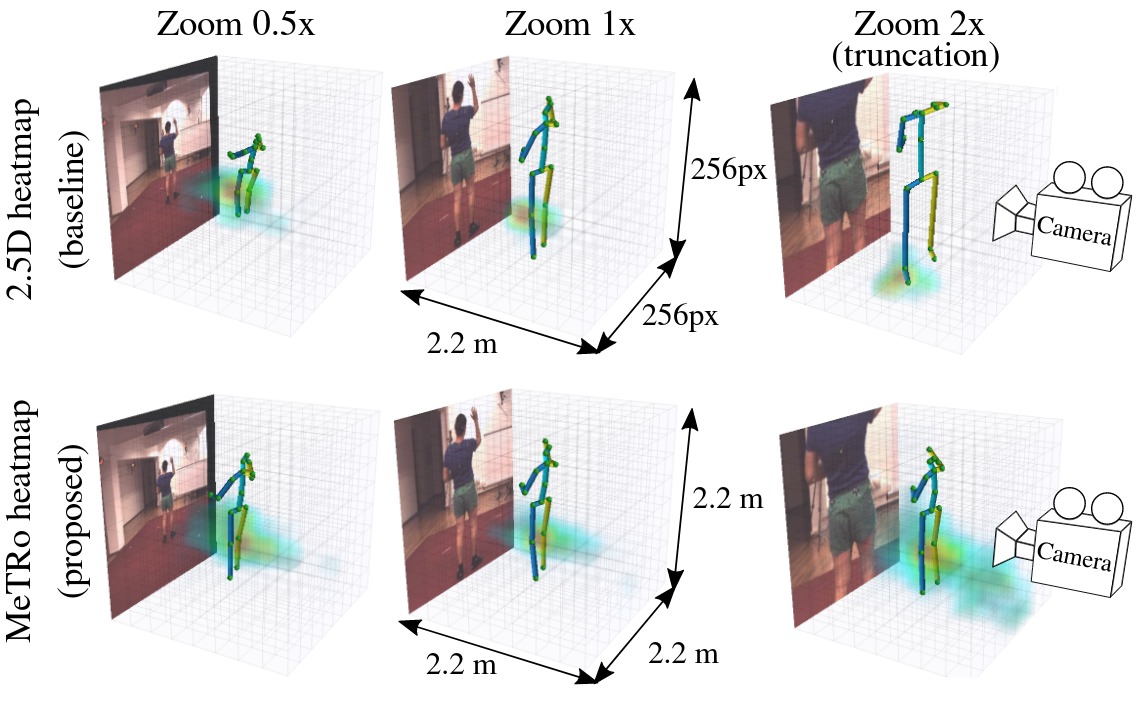
Heatmap representations have formed the basis of 2D human pose estimation systems for many years, but their generalizations for 3D pose have only recently been considered. This includes 2.5D volumetric heatmaps, whose X and Y axes correspond to image space and the Z axis to metric depth around the subject. To obtain metric-scale predictions, these methods must include a separate, explicit post-processing step to resolve scale ambiguity. Further, they cannot encode body joint positions outside of the image boundaries, leading to incomplete pose estimates in case of image truncation. We address these limitations by proposing metric-scale truncation-robust (MeTRo) volumetric heatmaps, whose dimensions are defined in metric 3D space near the subject, instead of being aligned with image space. We train a fully-convolutional network to estimate such heatmaps from monocular RGB in an end-to-end manner. This reinterpretation of the heatmap dimensions allows us to estimate complete metric-scale poses without test-time knowledge of the focal length or person distance and without relying on anthropometric heuristics in post-processing. Furthermore, as the image space is decoupled from the heatmap space, the network can learn to reason about joints beyond the image boundary. Using ResNet-50 without any additional learned layers, we obtain state-of-the-art results on the Human3.6M and MPI-INF-3DHP benchmarks. As our method is simple and fast, it can become a useful component for real-time top-down multi-person pose estimation systems. We make our code publicly available to facilitate further research.
See also the extended journal version of this paper at https://vision.rwth-aachen.de/publication/00203 (journal version preferred for citation).
@inproceedings{Sarandi20metro,
title={Metric-Scale Truncation-Robust Heatmaps for {3D} Human Pose Estimation},
author={S\'ar\'andi, Istv\'an and Linder, Timm and Arras, Kai O. and Leibe, Bastian},
booktitle={IEEE International Conference on Automatic Face and Gesture Recognition (FG)},
year={2020}
}
An Immersive Node-Link Visualization of Artificial Neural Networks for Machine Learning Experts
The black box problem of artificial neural networks (ANNs) is still a very relevant issue. When communicating basic concepts of ANNs, they are often depicted as node-link diagrams. Despite this being a straight forward way to visualize them, it is rarely used outside an educational context. However, we hypothesize that large-scale node-link diagrams of full ANNs could be useful even to machine learning experts. Hence, we present a visualization tool that depicts convolutional ANNs as node-link diagrams using immersive virtual reality. We applied our tool to a use-case in the field of machine learning research and adapted it to the specific challenges. Finally, we performed an expert review to evaluate the usefulness of our visualization. We found that our node-link visualization of ANNs was perceived as helpful in this professional context.
@inproceedings{Bellgardt2020a,
author = {Bellgardt, Martin and Scheiderer, Christian and Kuhlen, Torsten W.},
booktitle = {Proc. of IEEE AIVR}, title = {{An Immersive Node-Link Visualization of Artificial Neural Networks for Machine Learning Experts}},
year = {2020}
}
Higher-Order Time Integration for Deformable Solids
Visually appealing and vivid simulations of deformable solids represent an important aspect of physically based computer animation. For the temporal discretization, it is customary in computer animation to use first-order accurate integration methods, such as Backward Euler, due to their simplicity and robustness. Although there is notable research on second-order methods, their use is not widespread. Many of these well-known methods have significant drawbacks such as severe numerical damping or scene-dependent time step restrictions to ensure stability. In this paper, we discuss the most relevant requirements on such methods in computer animation and motivate the interest beyond first-order accuracy. Keeping these requirements in mind, we investigate several promising methods from the families of diagonally implicit Runge-Kutta (DIRK) and Rosenbrock methods which currently do not appear to have considerable popularity in this field. We show that the usage of such methods improves the visual quality of physical animations. In addition, we demonstrate that they allow distinctly more control over damping at lower computational cost than classical methods. As part of our theoretical contribution, we review aspects of simulations that are often considered more intricate with higher-order methods, such as contact handling. To this end, we derive an implicit linearized contact model based on a predictor-corrector approach that leads to consistent behavior with higher-order integrators as predictors. Our contact model is well suited for the simulation of stiff, nonlinear materials with the integration methods presented in this paper and more common methods such as Backward Euler alike.
@article{LLJKB20,
author = {Fabian L{\"{o}}schner and Andreas Longva and Stefan Jeske and Tassilo Kugelstadt and Jan Bender},
title = {Higher-Order Time Integration for Deformable Solids},
year = {2020},
journal = {Computer Graphics Forum},
volume = {39},
number = {8}
}
Inferring a User’s Intent on Joining or Passing by Social Groups

Modeling the interactions between users and social groups of virtual agents (VAs) is vital in many virtual-reality-based applications. However, only little research on group encounters has been conducted yet. We intend to close this gap by focusing on the distinction between joining and passing-by a group. To enhance the interactive capacity of VAs in these situations, knowing the user’s objective is required to showreasonable reactions. To this end,we propose a classification scheme which infers the user’s intent based on social cues such as proxemics, gazing and orientation, followed by triggering believable, non-verbal actions on the VAs.We tested our approach in a pilot study with overall promising results and discuss possible improvements for further studies.
@inproceedings{10.1145/3383652.3423862,
author = {B\"{o}nsch, Andrea and Bluhm, Alexander R. and Ehret, Jonathan and Kuhlen, Torsten W.},
title = {Inferring a User's Intent on Joining or Passing by Social Groups},
year = {2020},
isbn = {9781450375863},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3383652.3423862},
doi = {10.1145/3383652.3423862},
abstract = {Modeling the interactions between users and social groups of virtual agents (VAs) is vital in many virtual-reality-based applications. However, only little research on group encounters has been conducted yet. We intend to close this gap by focusing on the distinction between joining and passing-by a group. To enhance the interactive capacity of VAs in these situations, knowing the user's objective is required to show reasonable reactions. To this end, we propose a classification scheme which infers the user's intent based on social cues such as proxemics, gazing and orientation, followed by triggering believable, non-verbal actions on the VAs. We tested our approach in a pilot study with overall promising results and discuss possible improvements for further studies.},
booktitle = {Proceedings of the 20th ACM International Conference on Intelligent Virtual Agents},
articleno = {10},
numpages = {8},
keywords = {virtual agents, joining a group, social groups, virtual reality},
location = {Virtual Event, Scotland, UK},
series = {IVA '20}
}
Evaluating the Influence of Phoneme-Dependent Dynamic Speaker Directivity of Embodied Conversational Agents’ Speech
Generating natural embodied conversational agents within virtual spaces crucially depends on speech sounds and their directionality. In this work, we simulated directional filters to not only add directionality, but also directionally adapt each phoneme. We therefore mimic reality where changing mouth shapes have an influence on the directional propagation of sound. We conducted a study (n = 32) evaluating naturalism ratings, preference and distinguishability of omnidirectional speech auralization compared to static and dynamic, phoneme-dependent directivities. The results indicated that participants cannot distinguish dynamic from static directivity. Furthermore, participants’ preference ratings aligned with their naturalism ratings. There was no unanimity, however, with regards to which auralization is the most natural.
@inproceedings{10.1145/3383652.3423863,
author = {Ehret, Jonathan and Stienen, Jonas and Brozdowski, Chris and B\"{o}nsch, Andrea and Mittelberg, Irene and Vorl\"{a}nder, Michael and Kuhlen, Torsten W.},
title = {Evaluating the Influence of Phoneme-Dependent Dynamic Speaker Directivity of Embodied Conversational Agents' Speech},
year = {2020},
isbn = {9781450375863},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3383652.3423863},
doi = {10.1145/3383652.3423863},
abstract = {Generating natural embodied conversational agents within virtual spaces crucially depends on speech sounds and their directionality. In this work, we simulated directional filters to not only add directionality, but also directionally adapt each phoneme. We therefore mimic reality where changing mouth shapes have an influence on the directional propagation of sound. We conducted a study (n = 32) evaluating naturalism ratings, preference and distinguishability of omnidirectional speech auralization compared to static and dynamic, phoneme-dependent directivities. The results indicated that participants cannot distinguish dynamic from static directivity. Furthermore, participants' preference ratings aligned with their naturalism ratings. There was no unanimity, however, with regards to which auralization is the most natural.},
booktitle = {Proceedings of the 20th ACM International Conference on Intelligent Virtual Agents},
articleno = {17},
numpages = {8},
keywords = {phoneme-dependent directivity, directional 3D sound, speech, embodied conversational agents, virtual acoustics},
location = {Virtual Event, Scotland, UK},
series = {IVA '20}
}
Rilievo: Artistic Scene Authoring via Interactive Height Map Extrusion in VR
The authors present a virtual authoring environment for artistic creation in VR. It enables the effortless conversion of 2D images into volumetric 3D objects. Artistic elements in the input material are extracted with a convenient VR-based segmentation tool. Relief sculpting is then performed by interactively mixing different height maps. These are automatically generated from the input image structure and appearance. A prototype of the tool is showcased in an analog-virtual artistic workflow in collaboration with a traditional painter. It combines the expressiveness of analog painting and sculpting with the creative freedom of spatial arrangement in VR.
@article{eroglu2020rilievo,
title={Rilievo: Artistic Scene Authoring via Interactive Height Map Extrusion in VR},
author={Eroglu, Sevinc and Schmitz, Patric and Martinez, Carlos Aguilera and Rusch, Jana and Kobbelt, Leif and Kuhlen, Torsten W},
journal={Leonardo},
volume={53},
number={4},
pages={438--441},
year={2020},
publisher={MIT Press}
}
Fast and Robust QEF Minimization using Probabilistic Quadrics
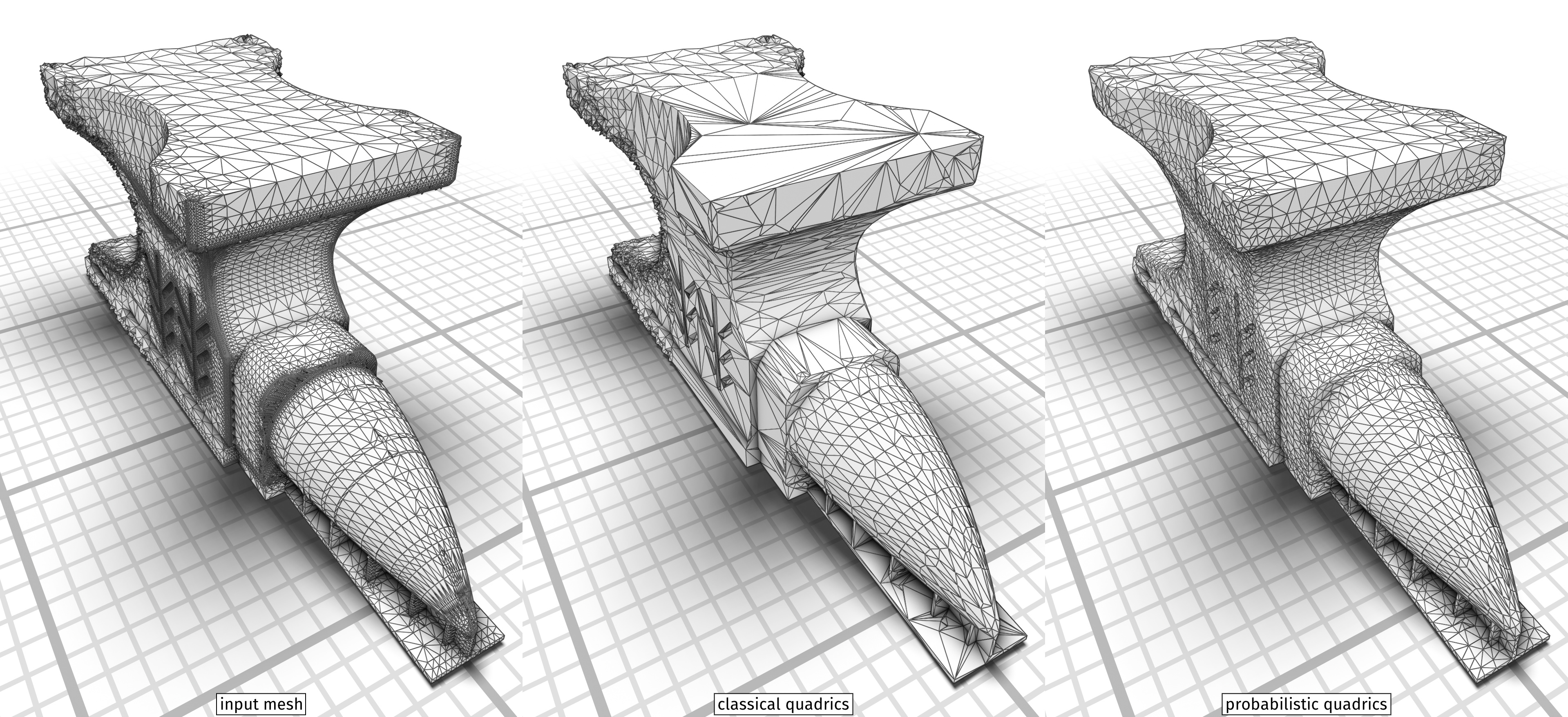
Error quadrics are a fundamental and powerful building block in many geometry processing algorithms. However, finding the minimizer of a given quadric is in many cases not robust and requires a singular value decomposition or some ad-hoc regularization. While classical error quadrics measure the squared deviation from a set of ground truth planes or polygons, we treat the input data as genuinely uncertain information and embed error quadrics in a probabilistic setting ("probabilistic quadrics") where the optimal point minimizes the expected squared error. We derive closed form solutions for the popular plane and triangle quadrics subject to (spatially varying, anisotropic) Gaussian noise. Probabilistic quadrics can be minimized robustly by solving a simple linear system - 50x faster than SVD. We show that probabilistic quadrics have superior properties in tasks like decimation and isosurface extraction since they favor more uniform triangulations and are more tolerant to noise while still maintaining feature sensitivity. A broad spectrum of applications can directly benefit from our new quadrics as a drop-in replacement which we demonstrate with mesh smoothing via filtered quadrics and non-linear subdivision surfaces.
@article {10.1111:cgf.13933,
journal = {Computer Graphics Forum},
title = {{Fast and Robust QEF Minimization using Probabilistic Quadrics}},
author = {Trettner, Philip and Kobbelt, Leif},
year = {2020},
publisher = {The Eurographics Association and John Wiley & Sons Ltd.},
ISSN = {1467-8659},
DOI = {10.1111/cgf.13933}
}
High-Fidelity Point-Based Rendering of Large-Scale 3D Scan Datasets

Digitalization of 3D objects and scenes using modern depth sensors and high-resolution RGB cameras enables the preservation of human cultural artifacts at an unprecedented level of detail. Interactive visualization of these large datasets, however, is challenging without degradation in visual fidelity. A common solution is to fit the dataset into available video memory by downsampling and compression. The achievable reproduction accuracy is thereby limited for interactive scenarios, such as immersive exploration in Virtual Reality (VR). This degradation in visual realism ultimately hinders the effective communication of human cultural knowledge. This article presents a method to render 3D scan datasets with minimal loss of visual fidelity. A point-based rendering approach visualizes scan data as a dense splat cloud. For improved surface approximation of thin and sparsely sampled objects, we propose oriented 3D ellipsoids as rendering primitives. To render massive texture datasets, we present a virtual texturing system that dynamically loads required image data. It is paired with a single-pass page prediction method that minimizes visible texturing artifacts. Our system renders a challenging dataset in the order of 70 million points and a texture size of 1.2 terabytes consistently at 90 frames per second in stereoscopic VR.
Feature Tracking by Two-Step Optimization
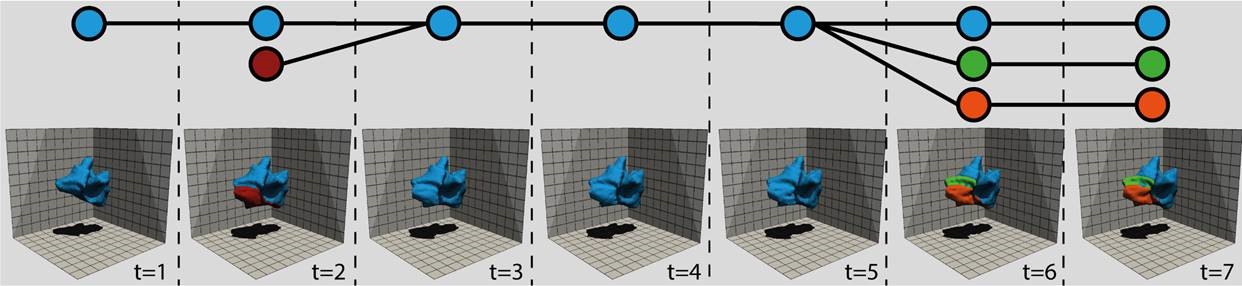
Tracking the temporal evolution of features in time-varying data is a key method in visualization. For typical feature definitions, such as vortices, objects are sparsely distributed over the data domain. In this paper, we present a novel approach for tracking both sparse and space-filling features. While the former comprise only a small fraction of the domain, the latter form a set of objects whose union covers the domain entirely while the individual objects are mutually disjunct. Our approach determines the assignment of features between two successive time-steps by solving two graph optimization problems. It first resolves one-to-one assignments of features by computing a maximum-weight, maximum-cardinality matching on a weighted bi-partite graph. Second, our algorithm detects events by creating a graph of potentially conflicting event explanations and finding a weighted, independent set in it. We demonstrate our method's effectiveness on synthetic and simulation data sets, the former of which enables quantitative evaluation because of the availability of ground-truth information. Here, our method performs on par or better than a well-established reference algorithm. In addition, manual visual inspection by our collaborators confirm the results' plausibility for simulation data.
@ARTICLE{Schnorr2018,
author = {Andrea Schnorr and Dirk N. Helmrich and Dominik Denker and Torsten W. Kuhlen and Bernd Hentschel},
title = {{F}eature {T}racking by {T}wo-{S}tep {O}ptimization},
journal = TVCG,
volume = {preprint available online},
doi = {https://doi.org/10.1109/TVCG.2018.2883630},
year = 2018,
}
The Impact of a Virtual Agent’s Non-Verbal Emotional Expression on a User’s Personal Space Preferences

Virtual-reality-based interactions with virtual agents (VAs) are likely subject to similar influences as human-human interactions. In either real or virtual social interactions, interactants try to maintain their personal space (PS), an ubiquitous, situative, flexible safety zone. Building upon larger PS preferences to humans and VAs with angry facial expressions, we extend the investigations to whole-body emotional expressions. In two immersive settings–HMD and CAVE–66 males were approached by an either happy, angry, or neutral male VA. Subjects preferred a larger PS to the angry VA when being able to stop him at their convenience (Sample task), replicating previous findings, and when being able to actively avoid him (PassBy task). In the latter task, we also observed larger distances in the CAVE than in the HMD.
@inproceedings{10.1145/3383652.3423888,
author = {B\"{o}nsch, Andrea and Radke, Sina and Ehret, Jonathan and Habel, Ute and Kuhlen, Torsten W.},
title = {The Impact of a Virtual Agent's Non-Verbal Emotional Expression on a User's Personal Space Preferences},
year = {2020},
isbn = {9781450375863},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3383652.3423888},
doi = {10.1145/3383652.3423888},
abstract = {Virtual-reality-based interactions with virtual agents (VAs) are likely subject to similar influences as human-human interactions. In either real or virtual social interactions, interactants try to maintain their personal space (PS), an ubiquitous, situative, flexible safety zone. Building upon larger PS preferences to humans and VAs with angry facial expressions, we extend the investigations to whole-body emotional expressions. In two immersive settings-HMD and CAVE-66 males were approached by an either happy, angry, or neutral male VA. Subjects preferred a larger PS to the angry VA when being able to stop him at their convenience (Sample task), replicating previous findings, and when being able to actively avoid him (Pass By task). In the latter task, we also observed larger distances in the CAVE than in the HMD.},
booktitle = {Proceedings of the 20th ACM International Conference on Intelligent Virtual Agents},
articleno = {12},
numpages = {8},
keywords = {personal space, virtual reality, emotions, virtual agents},
location = {Virtual Event, Scotland, UK},
series = {IVA '20}
}
The 19 Unifying Questionnaire Constructs of Artificial Social Agents: An IVA Community Analysis
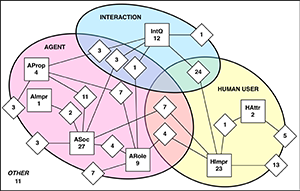
In this paper, we report on the multi-year Intelligent Virtual Agents (IVA) community effort, involving more than 80 researchers worldwide, researching the IVA community interests and practises in evaluating human interaction with an artificial social agent (ASA). The effort is driven by previous IVA workshops and plenary IVA discussions related to the methodological crisis on the evaluation of ASAs. A previous literature review showed a continuous practise of creating new questionnaires instead of reusing validated questionnaires. We address this issue by examining questionnaire measurement constructs used in empirical studies between 2013 to 2018 published in the IVA conference. We identified 189 constructs used in 89 questionnaires that are reported across 81 studies. Although these constructs have different names, they often measure the same thing. In this paper, we, therefore, present a unifying set of 19 constructs that captures more than 80% of the 189 constructs initially identified. We established this set in two steps. First, 49 researchers classified the constructs in broad theoretically based categories. Next, 23 researchers grouped the constructs in each category on their similarity. The resulting 19 groups form a unifying set of constructs, which will be the basis for the future questionnaire instrument of human-ASA interaction.
Nominated for the Best Paper Award.
@inproceedings{10.1145/3383652.3423873,
author = {Fitrianie, Siska and Bruijnes, Merijn and Richards, Deborah and B\"{o}nsch, Andrea and Brinkman, Willem-Paul},
title = {The 19 Unifying Questionnaire Constructs of Artificial Social Agents: An IVA Community Analysis},
year = {2020},
isbn = {9781450375863},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3383652.3423873},
doi = {10.1145/3383652.3423873},
abstract = {In this paper, we report on the multi-year Intelligent Virtual Agents (IVA) community effort, involving more than 80 researchers worldwide, researching the IVA community interests and practises in evaluating human interaction with an artificial social agent (ASA). The effort is driven by previous IVA workshops and plenary IVA discussions related to the methodological crisis on the evaluation of ASAs. A previous literature review showed a continuous practise of creating new questionnaires instead of reusing validated questionnaires. We address this issue by examining questionnaire measurement constructs used in empirical studies between 2013 to 2018 published in the IVA conference. We identified 189 constructs used in 89 questionnaires that are reported across 81 studies. Although these constructs have different names, they often measure the same thing. In this paper, we, therefore, present a unifying set of 19 constructs that captures more than 80% of the 189 constructs initially identified. We established this set in two steps. First, 49 researchers classified the constructs in broad theoretically based categories. Next, 23 researchers grouped the constructs in each category on their similarity. The resulting 19 groups form a unifying set of constructs, which will be the basis for the future questionnaire instrument of human-ASA interaction.},
booktitle = {Proceedings of the 20th ACM International Conference on Intelligent Virtual Agents},
articleno = {21},
numpages = {8},
keywords = {evaluation instrument, user study, Artificial social agent, questionnaire, measurement construct},
location = {Virtual Event, Scotland, UK},
series = {IVA '20}
}
High-Performance Image Filters via Sparse Approximations
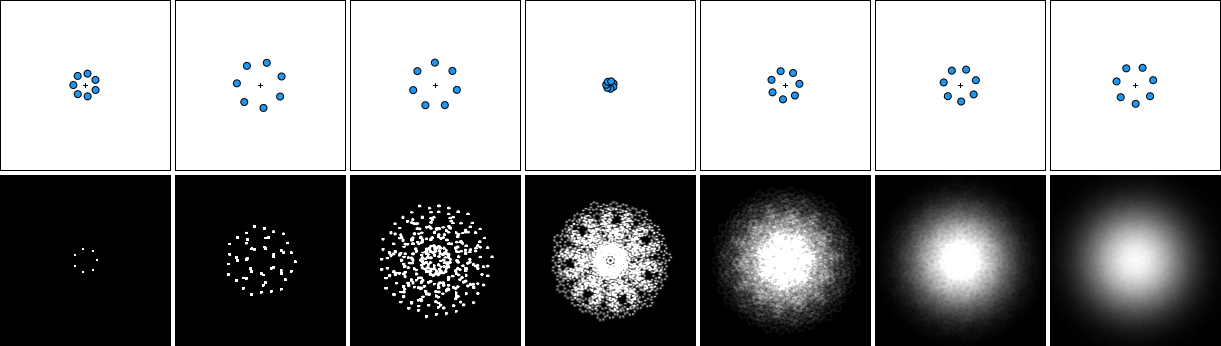
We present a numerical optimization method to find highly efficient (sparse) approximations for convolutional image filters. Using a modified parallel tempering approach, we solve a constrained optimization that maximizes approximation quality while strictly staying within a user-prescribed performance budget. The results are multi-pass filters where each pass computes a weighted sum of bilinearly interpolated sparse image samples, exploiting hardware acceleration on the GPU. We systematically decompose the target filter into a series of sparse convolutions, trying to find good trade-offs between approximation quality and performance. Since our sparse filters are linear and translation-invariant, they do not exhibit the aliasing and temporal coherence issues that often appear in filters working on image pyramids. We show several applications, ranging from simple Gaussian or box blurs to the emulation of sophisticated Bokeh effects with user-provided masks. Our filters achieve high performance as well as high quality, often providing significant speed-up at acceptable quality even for separable filters. The optimized filters can be baked into shaders and used as a drop-in replacement for filtering tasks in image processing or rendering pipelines.
Cost Minimizing Local Anisotropic Quad Mesh Refinement
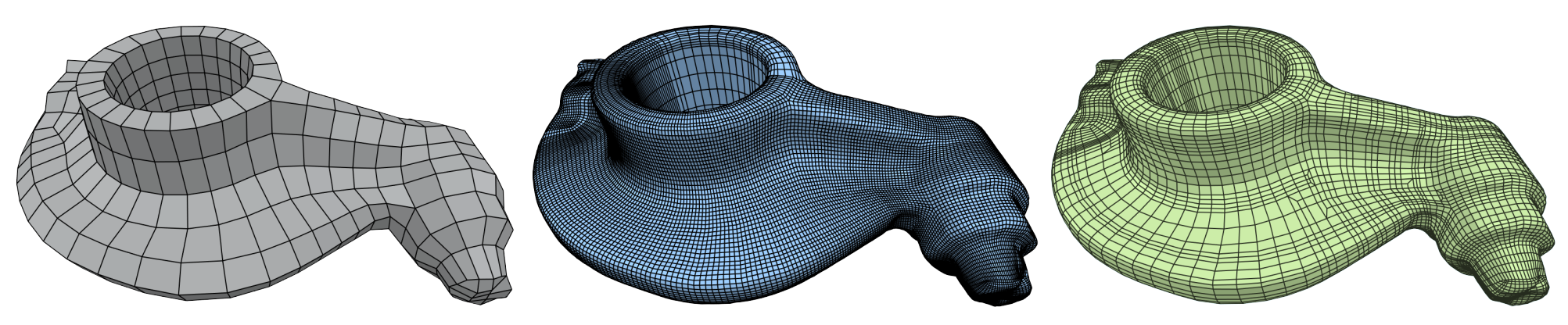
Quad meshes as a surface representation have many conceptual advantages over triangle meshes. Their edges can naturally be aligned to principal curvatures of the underlying surface and they have the flexibility to create strongly anisotropic cells without causing excessively small inner angles. While in recent years a lot of progress has been made towards generating high quality uniform quad meshes for arbitrary shapes, their adaptive and anisotropic refinement remains difficult since a single edge split might propagate across the entire surface in order to maintain consistency. In this paper we present a novel refinement technique which finds the optimal trade-off between number of resulting elements and inserted singularities according to a user prescribed weighting. Our algorithm takes as input a quad mesh with those edges tagged that are prescribed to be refined. It then formulates a binary optimization problem that minimizes the number of additional edges which need to be split in order to maintain consistency. Valence 3 and 5 singularities have to be introduced in the transition region between refined and unrefined regions of the mesh. The optimization hence computes the optimal trade-off and places singularities strategically in order to minimize the number of consistency splits — or avoids singularities where this causes only a small number of additional splits. When applying the refinement scheme iteratively, we extend our binary optimization formulation such that previous splits can be undone if this prevents degenerate cells with small inner angles that otherwise might occur in anisotropic regions or in the vicinity of singularities. We demonstrate on a number of challenging examples that the algorithm performs well in practice.
@article{Lyon:2020:Cost,
title = {Cost Minimizing Local Anisotropic Quad Mesh Refinement},
author = {Lyon, Max and Bommes, David and Kobbelt, Leif},
journal = {Computer Graphics Forum},
volume = {39},
number = {5},
year = {2020},
doi = {10.1111/cgf.14076}
}
A Three-Level Approach to Texture Mapping and Synthesis on 3D Surfaces

We present a method for example-based texturing of triangular 3D meshes. Our algorithm maps a small 2D texture sample onto objects of arbitrary size in a seamless fashion, with no visible repetitions and low overall distortion. It requires minimal user interaction and can be applied to complex, multi-layered input materials that are not required to be tileable. Our framework integrates a patch-based approach with per-pixel compositing. To minimize visual artifacts, we run a three-level optimization that starts with a rigid alignment of texture patches (macro scale), then continues with non-rigid adjustments (meso scale) and finally performs pixel-level texture blending (micro scale). We demonstrate that the relevance of the three levels depends on the texture content and type (stochastic, structured, or anisotropic textures).
@article{schuster2020,
author = {Schuster, Kersten and Trettner, Philip and Schmitz, Patric and Kobbelt, Leif},
title = {A Three-Level Approach to Texture Mapping and Synthesis on 3D Surfaces},
year = {2020},
issue_date = {Apr 2020},
publisher = {The Association for Computers in Mathematics and Science Teaching},
address = {USA},
volume = {3},
number = {1},
url = {https://doi.org/10.1145/3384542},
doi = {10.1145/3384542},
journal = {Proc. ACM Comput. Graph. Interact. Tech.},
month = apr,
articleno = {1},
numpages = {19},
keywords = {material blending, surface texture synthesis, texture mapping}
}
PRS-Net: Planar Reflective Symmetry Detection Net for 3D Models
In geometry processing, symmetry is a universal type of high-level structural information of 3D models and benefits many geometry processing tasks including shape segmentation, alignment, matching, and completion. Thus it is an important problem to analyze various symmetry forms of 3D shapes. Planar reflective symmetry is the most fundamental one. Traditional methods based on spatial sampling can be time-consuming and may not be able to identify all the symmetry planes. In this paper, we present a novel learning framework to automatically discover global planar reflective symmetry of a 3D shape. Our framework trains an unsupervised 3D convolutional neural network to extract global model features and then outputs possible global symmetry parameters, where input shapes are represented using voxels. We introduce a dedicated symmetry distance loss along with a regularization loss to avoid generating duplicated symmetry planes. Our network can also identify generalized cylinders by predicting their rotation axes. We further provide a method to remove invalid and duplicated planes and axes. We demonstrate that our method is able to produce reliable and accurate results. Our neural network based method is hundreds of times faster than the state-of-the-art methods, which are based on sampling. Our method is also robust even with noisy or incomplete input surfaces.
@article{abs-1910-06511,
author = {Lin Gao and
Ling{-}Xiao Zhang and
Hsien{-}Yu Meng and
Yi{-}Hui Ren and
Yu{-}Kun Lai and
Leif Kobbelt},
title = {PRS-Net: Planar Reflective Symmetry Detection Net for 3D Models},
journal = {CoRR},
volume = {abs/1910.06511},
year = {2019},
url = {http://arxiv.org/abs/1910.06511},
archivePrefix = {arXiv},
eprint = {1910.06511},
}
Immersive Sketching to Author Crowd Movements in Real-time

the flow of virtual crowds in a direct and interactive manner. Here, options to redirect a flow by sketching barriers, or guiding entities based on a sketched network of connected sections are provided. As virtual crowds are increasingly often embedded into virtual reality (VR) applications, 3D authoring is of interest.
In this preliminary work, we thus present a sketch-based approach for VR. First promising results of a proof-of-concept are summarized and improvement suggestions, extensions, and future steps are discussed.
@inproceedings{10.1145/3383652.3423883,
author = {B\"{o}nsch, Andrea and Barton, Sebastian J. and Ehret, Jonathan and Kuhlen, Torsten W.},
title = {Immersive Sketching to Author Crowd Movements in Real-Time},
year = {2020},
isbn = {9781450375863},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3383652.3423883},
doi = {10.1145/3383652.3423883},
abstract = {Sketch-based interfaces in 2D screen space allow to efficiently author the flow of virtual crowds in a direct and interactive manner. Here, options to redirect a flow by sketching barriers, or guiding entities based on a sketched network of connected sections are provided.As virtual crowds are increasingly often embedded into virtual reality (VR) applications, 3D authoring is of interest. In this preliminary work, we thus present a sketch-based approach for VR. First promising results of a proof-of-concept are summarized and improvement suggestions, extensions, and future steps are discussed.},
booktitle = {Proceedings of the 20th ACM International Conference on Intelligent Virtual Agents},
articleno = {11},
numpages = {3},
keywords = {virtual crowds, virtual reality, sketch-based interface, authoring},
location = {Virtual Event, Scotland, UK},
series = {IVA '20}
}
Unsupervised Segmentation of Indoor 3D Point Cloud: Application to Object-based Classification
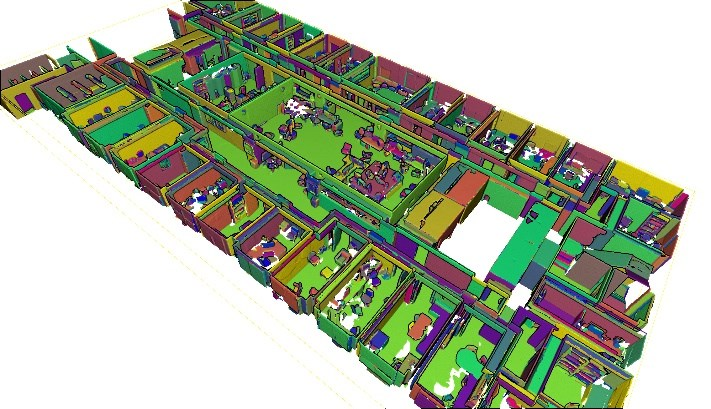
Point cloud data of indoor scenes is primarily composed of planar-dominant elements. Automatic shape segmentation is thus valuable to avoid labour intensive labelling. This paper provides a fully unsupervised region growing segmentation approach for efficient clustering of massive 3D point clouds. Our contribution targets a low-level grouping beneficial to object-based classification. We argue that the use of relevant segments for object-based classification has the potential to perform better in terms of recognition accuracy, computing time and lowers the manual labelling time needed. However, fully unsupervised approaches are rare due to a lack of proper generalisation of user-defined parameters. We propose a self-learning heuristic process to define optimal parameters, and we validate our method on a large and richly annotated dataset (S3DIS) yielding 88.1% average F1-score for object-based classification. It permits to automatically segment indoor point clouds with no prior knowledge at commercially viable performance and is the foundation for efficient indoor 3D modelling in cluttered point clouds.
@Article{poux2020b,
author = {Poux, F. and Mattes, C. and Kobbelt, L.},
title = {UNSUPERVISED SEGMENTATION OF INDOOR 3D POINT CLOUD: APPLICATION TO OBJECT-BASED CLASSIFICATION},
journal = {ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences},
volume = {XLIV-4/W1-2020},
year = {2020},
pages = {111--118},
url = {https://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XLIV-4-W1-2020/111/2020/},
doi = {10.5194/isprs-archives-XLIV-4-W1-2020-111-2020}
}
Initial User-Centered Design of a Virtual Reality Heritage System: Applications for Digital Tourism
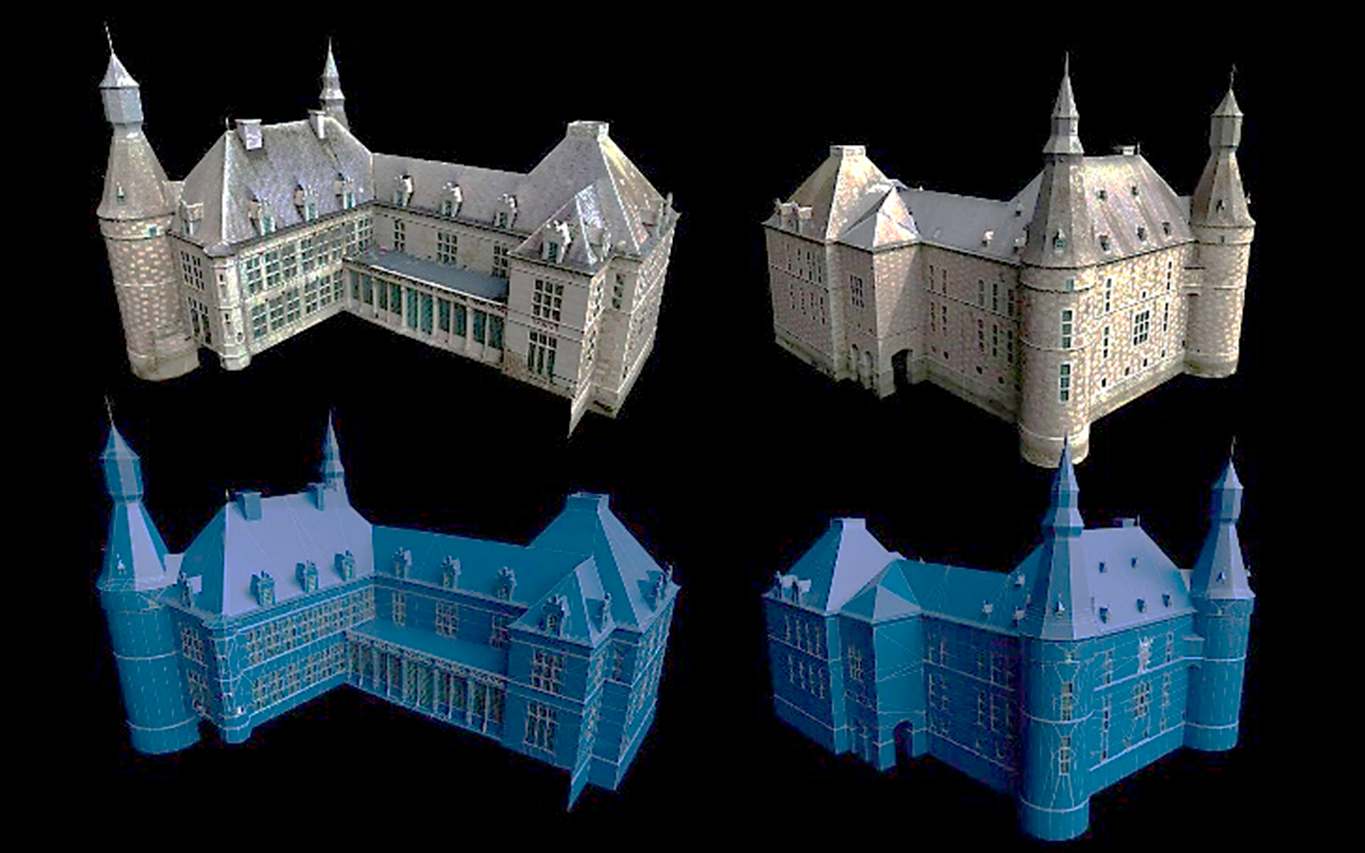
Reality capture allows for the reconstruction, with a high accuracy, of the physical reality of cultural heritage sites. Obtained 3D models are often used for various applications such as promotional content creation, virtual tours, and immersive experiences. In this paper, we study new ways to interact with these high-quality 3D reconstructions in a real-world scenario. We propose a user-centric product design to create a virtual reality (VR) application specifically intended for multi-modal purposes. It is applied to the castle of Jehay (Belgium), which is under renovation, to permit multi-user digital immersive experiences. The article proposes a high-level view of multi-disciplinary processes, from a needs analysis to the 3D reality capture workflow and the creation of a VR environment incorporated into an immersive application. We provide several relevant VR parameters for the scene optimization, the locomotion system, and the multi-user environment definition that were tested in a heritage tourism context.
@article{poux2020a,
title={Initial User-Centered Design of a Virtual Reality Heritage System: Applications for Digital Tourism},
volume={12},
ISSN={2072-4292},
url={http://dx.doi.org/10.3390/rs12162583},
DOI={10.3390/rs12162583},
number={16},
journal={Remote Sensing},
publisher={MDPI AG},
author={Poux, Florent and Valembois, Quentin and Mattes, Christian and Kobbelt, Leif and Billen, Roland},
year={2020},
month={Aug},
pages={2583}
}
Reposing Humans by Warping 3D Features
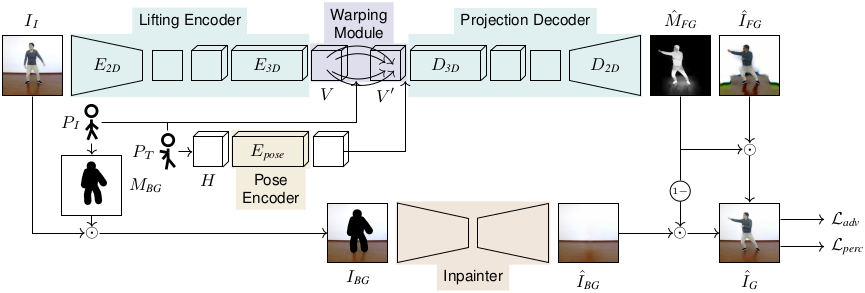
We address the problem of reposing an image of a human into any desired novel pose. This conditional image-generation task requires reasoning about the 3D structure of the human, including self-occluded body parts. Most prior works are either based on 2D representations or require fitting and manipulating an explicit 3D body mesh. Based on the recent success in deep learning-based volumetric representations, we propose to implicitly learn a dense feature volume from human images, which lends itself to simple and intuitive manipulation through explicit geometric warping. Once the latent feature volume is warped according to the desired pose change, the volume is mapped back to RGB space by a convolutional decoder. Our state-of-the-art results on the DeepFashion and the iPER benchmarks indicate that dense volumetric human representations are worth investigating in more detail.
@inproceedings{Knoche20reposing,
author = {Markus Knoche and Istv\'an S\'ar\'andi and Bastian Leibe},
title = {Reposing Humans by Warping {3D} Features},
booktitle = {IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW)},
year = {2020}
}
Calibratio - A Small, Low-Cost, Fully Automated Motion-to-Photon Measurement Device

Since the beginning of the design and implementation of virtual environments, these systems have been built to give the users the best possible experience. One detrimental factor for the user experience was shown to be a high end-to-end latency, here measured as motionto-photon latency, of the system. Thus, a lot of research in the past was focused on the measurement and minimization of this latency in virtual environments. Most existing measurement-techniques require either expensive measurement hardware like an oscilloscope, mechanical components like a pendulum or depend on manual evaluation of samples. This paper proposes a concept of an easy to build, low-cost device consisting of a microcontroller, servo motor and a photo diode to measure the motion-to-photon latency in virtual reality environments fully automatically. It is placed or attached to the system, calibrates itself and is controlled/monitored via a web interface. While the general concept is applicable to a variety of VR technologies, this paper focuses on the context of CAVE-like systems.
@InProceedings{Pape2020a,
author = {Sebastian Pape and Marcel Kr\"{u}ger and Jan M\"{u}ller and Torsten W. Kuhlen},
title = {{Calibratio - A Small, Low-Cost, Fully Automated Motion-to-Photon Measurement Device}},
booktitle = {10th Workshop on Software Engineering and Architectures for Realtime Interactive Systems (SEARIS)},
year = {2020},
month={March}
}
Single-Shot Panoptic Segmentation
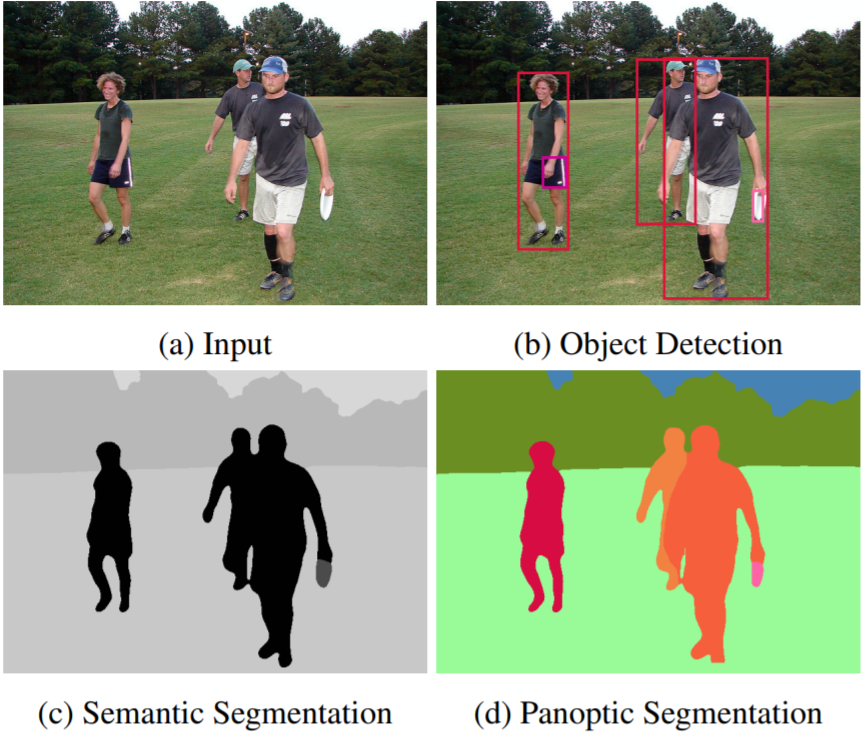
We present a novel end-to-end single-shot method that segments countable object instances (things) as well as background regions (stuff) into a non-overlapping panoptic segmentation at almost video frame rate. Current state-of-the-art methods are far from reaching video frame rate and mostly rely on merging instance segmentation with semantic background segmentation. Our approach relaxes this requirement by using an object detector but is still able to resolve inter- and intra-class overlaps to achieve a non-overlapping segmentation. On top of a shared encoder-decoder backbone, we utilize multiple branches for semantic segmentation, object detection, and instance center prediction. Finally, our panoptic head combines all outputs into a panoptic segmentation and can even handle conflicting predictions between branches as well as certain false predictions. Our network achieves 32.6% PQ on MS-COCO at 21.8 FPS, opening up panoptic segmentation to a broader field of applications.
@article{weber2019single,
title={Single-Shot Panoptic Segmentation},
author={Weber, Mark and Luiten, Jonathon and Leibe, Bastian},
journal={arXiv preprint arXiv:1911.00764},
year={2019}
}
Joint Dual-Tasking in VR: Outlining the Behavioral Design of Interactive Human Companions Who Walk and Talk with a User

To resemble realistic and lively places, virtual environments are increasingly often enriched by virtual populations consisting of computer-controlled, human-like virtual agents. While the applications often provide limited user-agent interaction based on, e.g., collision avoidance or mutual gaze, complex user-agent dynamics such as joint locomotion combined with a secondary task, e.g., conversing, are rarely considered yet. These dual-tasking situations, however, are beneficial for various use-cases: guided tours and social simulations will become more realistic and engaging if a user is able to traverse a scene as a member of a social group, while platforms to study crowd and walking behavior will become more powerful and informative. To this end, this presentation deals with different areas of interaction dynamics, which need to be combined for modeling dual-tasking with virtual agents. Areas covered are kinematic parameters for the navigation behavior, group shapes in static and mobile situations as well as verbal and non-verbal behavior for conversations.
@InProceedings{Boensch2020a,
author = {Andrea B\"{o}nsch and Torsten W. Kuhlen},
title = {{Joint Dual-Tasking in VR: Outlining the Behavioral Design of Interactive Human Companions Who Walk and Talk with a User}},
booktitle = {IEEE Virtual Humans and Crowds for Immersive Environments (VHCIE)},
year = {2020},
month={March}
}
When Spatial Devices are not an Option : Object Manipulation in Virtual Reality using 2D Input Devices
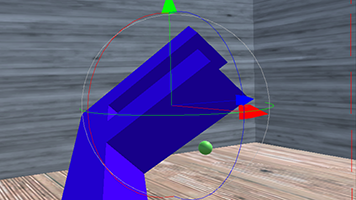
With the advent of low-cost virtual reality hardware, new applications arise in professional contexts. These applications have requirements that can differ from the usual premise when developing immersive systems. In this work, we explore the idea that spatial controllers might not be usable for practical reasons, even though they are the best interaction device for the task. Such a reason might be fatigue, as applications might be used over a long period of time. Additionally, some people might have even more difficulty lifting their hands, due to a disability. Hence, we attempt to measure how much the performance in a spatial interaction task decreases when using classical 2D interaction devices instead of a spatial controller. For this, we developed an interaction technique that uses 2D inputs and borrows principles from desktop interaction. We show that our interaction technique is slower to use than the state-of-the-art spatial interaction but is not much worse regarding precision and user preference.
@inproceedings{Bellgardt2020,
author = {Bellgardt, Martin and Krause, Niklas and Kuhlen, Torsten W.},
booktitle = {Proc. of GI VR / AR Workshop},
title = {{When Spatial Devices are not an Option : Object Manipulation in Virtual Reality using 2D Input Devices}},
DOI = {10.18420/vrar2020_9}
year = {2020}
}
Towards a Graphical User Interface for Exploring and Fine-Tuning Crowd Simulations
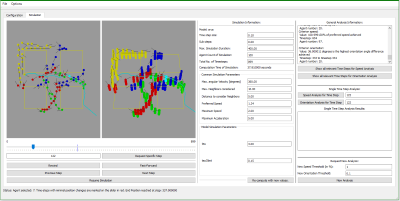
Simulating a realistic navigation of virtual pedestrians through virtual environments is a recurring subject of investigations. The various mathematical approaches used to compute the pedestrians’ paths result, i.a., in different computation-times and varying path characteristics. Customizable parameters, e.g., maximal walking speed or minimal interpersonal distance, add another level of complexity. Thus, choosing the best-fitting approach for a given environment and use-case is non-trivial, especially for novice users.
To facilitate the informed choice of a specific algorithm with a certain parameter set, crowd simulation frameworks such as Menge provide an extendable collection of approaches with a unified interface for usage. However, they often miss an elaborated visualization with high informative value accompanied by visual analysis methods to explore the complete simulation data in more detail – which is yet required for an informed choice. Benchmarking suites such as SteerBench are a helpful approach as they objectively analyze crowd simulations, however they are too tailored to specific behavior details. To this end, we propose a preliminary design of an advanced graphical user interface providing a 2D and 3D visualization of the crowd simulation data as well as features for time navigation and an overall data exploration.
@InProceedings{Boensch2020b,
author = {Andrea B\"{o}nsch and Marcel Jonda and Jonathan Ehret and Torsten W. Kuhlen},
title = {{Towards a Graphical User Interface for Exploring and Fine-Tuning Crowd Simulations}},
booktitle = {IEEE Virtual Humans and Crowds for Immersive Environments (VHCIE)},
year = {2020},
month={March}
}
Talk: Insite: A Generalized Pipeline for In-transit Visualization and Analysis
Neuronal network simulators are essential to computational neuroscience, enabling the study of the nervous system through in-silico experiments. Through utilization of high-performance computing resources, these simulators are able to simulate increasingly complex and large networks of neurons today. It also creates new challenges for the analysis and visualization of such simulations. In-situ and in-transport strategies are popular approaches in these scenarios. They enable live monitoring of running simulations and parameter adjustment in the case of erroneous configurations which can save valuable compute resources.
This talk will present the current status of our pipeline for in-transport analysis and visualization of neuronal network simulator data. The pipeline is able to couple with NEST along other simulators with data management (querying, filtering and merging) from multiple simulator instances. Finally, the data is passed to end-user applications for visualization and analysis. The goal is to be integrated into third party tools such as the multi-view visual analysis toolkit ViSimpl.
Talk: Proximity in Social VR - Interpersonal Distance between a User and Virtual Agents
Proxemic is a well known social behavioral measure, where the interpersonal distance between interactans is evaluated - either in real or in virtual social encounters. Given the prominent role of emotional expressions in our everyday social interactions, we investigated how emotions of a virtual agent affect proxemic adaptions while taking the aspects spatial constellation between user and agent as well as user’s level of dynamics into account.
SEG-MAT: 3D Shape Segmentation Using Medial Axis Transform
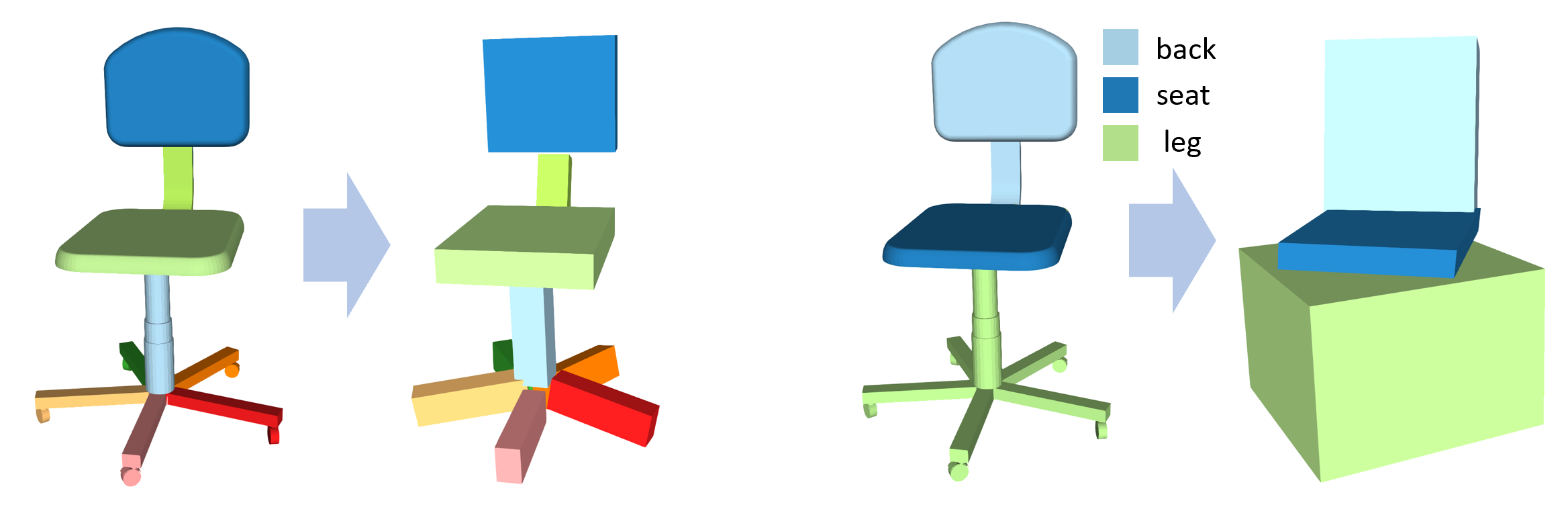
Segmenting arbitrary 3D objects into constituent parts that are structurally meaningful is a fundamental problem encountered in a wide range of computer graphics applications. Existing methods for 3D shape segmentation suffer from complex geometry processing and heavy computation caused by using low-level features and fragmented segmentation results due to the lack of global consideration. We present an efficient method, called SEG-MAT, based on the medial axis transform (MAT) of the input shape. Specifically, with the rich geometrical and structural information encoded in the MAT, we are able to develop a simple and principled approach to effectively identify the various types of junctions between different parts of a 3D shape. Extensive evaluations and comparisons show that our method outperforms the state-of-the-art methods in terms of segmentation quality and is also one order of magnitude faster.
@ARTICLE{9234096,
author={C. {Lin} and L. {Liu} and C. {Li} and L. {Kobbelt} and B. {Wang} and S. {Xin} and W. {Wang}},
journal={IEEE Transactions on Visualization and Computer Graphics},
title={SEG-MAT: 3D Shape Segmentation Using Medial Axis Transform},
year={2020},
volume={},
number={},
pages={1-1},
doi={10.1109/TVCG.2020.3032566}}
DR-SPAAM: A Spatial-Attention and Auto-regressive Model for Person Detection in 2D Range Data

Detecting persons using a 2D LiDAR is a challenging task due to the low information content of 2D range data. To alleviate the problem caused by the sparsity of the LiDAR points, current state-of-the-art methods fuse multiple previous scans and perform detection using the combined scans. The downside of such a backward looking fusion is that all the scans need to be aligned explicitly, and the necessary alignment operation makes the whole pipeline more expensive -- often too expensive for real-world applications. In this paper, we propose a person detection network which uses an alternative strategy to combine scans obtained at different times. Our method, Distance Robust SPatial Attention and Auto-regressive Model (DR-SPAAM), follows a forward looking paradigm. It keeps the intermediate features from the backbone network as a template and recurrently updates the template when a new scan becomes available. The updated feature template is in turn used for detecting persons currently in the scene. On the DROW dataset, our method outperforms the existing state-of-the-art, while being approximately four times faster, running at 87.2 FPS on a laptop with a dedicated GPU and at 22.6 FPS on an NVIDIA Jetson AGX embedded GPU. We release our code in PyTorch and a ROS node including pre-trained models.
Jetson project of the month for September 2020
Parametrization Quantization with Free Boundaries for Trimmed Quad Meshing
The generation of quad meshes based on surface parametrization techniques has proven to be a versatile approach. These techniques quantize an initial seamless parametrization so as to obtain an integer grid map implying a pure quad mesh. State-of-the-art methods following this approach have to assume that the surface to be meshed either has no boundary, or has a boundary which the resulting mesh is supposed to be aligned to. In a variety of applications this is not desirable and non-boundary-aligned meshes or grid-parametrizations are preferred. We thus present a technique to robustly generate integer grid maps which are either boundary-aligned, non-boundary-aligned, or partially boundary-aligned, just as required by different applications. We thereby generalize previous work to this broader setting. This enables the reliable generation of trimmed quad meshes with partial elements along the boundary, preferable in various scenarios, from tiled texturing over design and modeling to fabrication and architecture, due to fewer constraints and hence higher overall mesh quality and other benefits in terms of aesthetics and flexibility.
@article{Lyon:2019:TrimmedQuadMeshing,
author = "Lyon, Max and Campen, Marcel and Bommes, David and Kobbelt, Leif",
title = "Parametrization Quantization with Free Boundaries for Trimmed Quad Meshing",
journal = "ACM Transactions on Graphics",
volume = 38,
number = 4,
year = 2019
}
FEELVOS: Fast End-to-End Embedding Learning for Video Object Segmentation
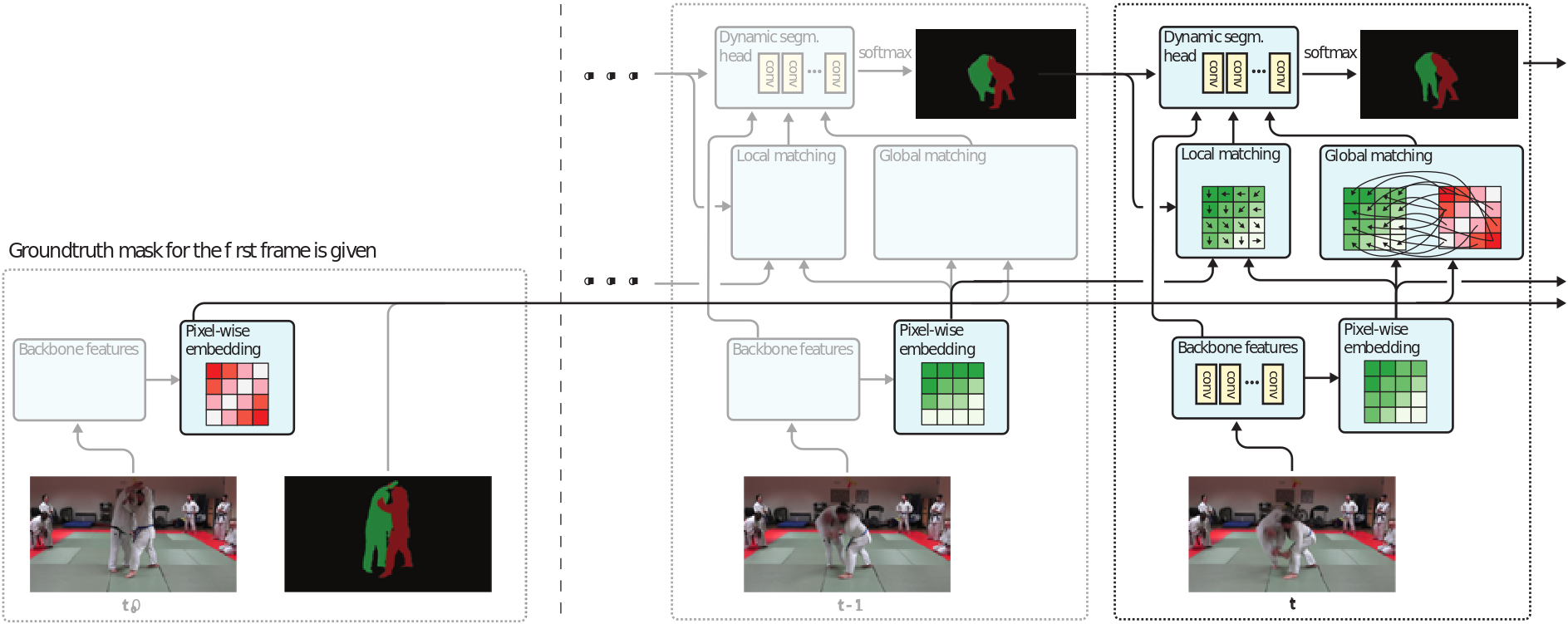
Many of the recent successful methods for video object segmentation (VOS) are overly complicated, heavily rely on fine-tuning on the first frame, and/or are slow, and are hence of limited practical use. In this work, we propose FEELVOS as a simple and fast method which does not rely on fine-tuning. In order to segment a video, for each frame FEELVOS uses a semantic pixel-wise embedding together with a global and a local matching mechanism to transfer information from the first frame and from the previous frame of the video to the current frame. In contrast to previous work, our embedding is only used as an internal guidance of a convolutional network. Our novel dynamic segmentation head allows us to train the network, including the embedding, end-to-end for the multiple object segmentation task with a cross entropy loss. We achieve a new state of the art in video object segmentation without fine-tuning with a J&F measure of 71.5% on the DAVIS 2017 validation set. We make our code and models available at https://github.com/tensorflow/models/tree/master/research/feelvos.
@inproceedings{Voigtlaender19CVPR,
title={{FEELVOS}: Fast End-to-End Embedding Learning for Video Object Segmentation},
author={Paul Voigtlaender and Yuning Chai and Florian Schroff and Hartwig Adam and Bastian Leibe and Liang-Chieh Chen},
booktitle={CVPR},
year={2019}
}
MOTS: Multi-Object Tracking and Segmentation
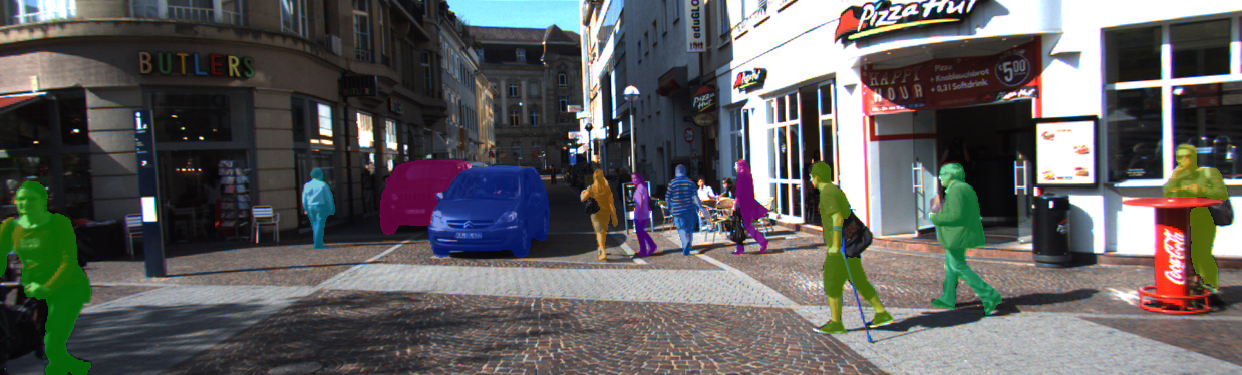
This paper extends the popular task of multi-object tracking to multi-object tracking and segmentation (MOTS). Towards this goal, we create dense pixel-level annotations for two existing tracking datasets using a semi-automatic annotation procedure. Our new annotations comprise 65,213 pixel masks for 977 distinct objects (cars and pedestrians) in 10,870 video frames. For evaluation, we extend existing multi-object tracking metrics to this new task. Moreover, we propose a new baseline method which jointly addresses detection, tracking, and segmentation with a single convolutional network. We demonstrate the value of our datasets by achieving improvements in performance when training on MOTS annotations. We believe that our datasets, metrics and baseline will become a valuable resource towards developing multi-object tracking approaches that go beyond 2D bounding boxes. We make our annotations, code, and models available at https://www.vision.rwth-aachen.de/page/mots.
@inproceedings{Voigtlaender19CVPR_MOTS,
author = {Paul Voigtlaender and Michael Krause and Aljo\u{s}a O\u{s}ep and Jonathon Luiten and Berin Balachandar Gnana Sekar and Andreas Geiger and Bastian Leibe},
title = {{MOTS}: Multi-Object Tracking and Segmentation},
booktitle = {CVPR},
year = {2019},
}
Interlinked SPH Pressure Solvers for Strong Fluid-Rigid Coupling
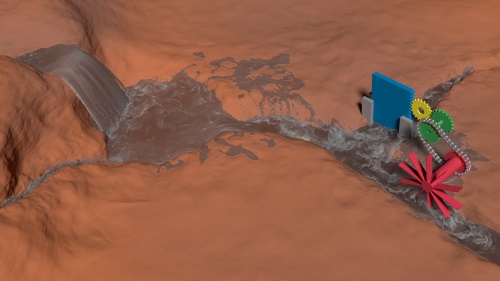
We present a strong fluid-rigid coupling for SPH fluids and rigid bodies with particle-sampled surfaces. The approach interlinks the iterative pressure update at fluid particles with a second SPH solver that computes artificial pressure at rigid body particles. The introduced SPH rigid body solver models rigid-rigid contacts as artificial density deviations at rigid body particles. The corresponding pressure is iteratively computed by solving a global formulation which is particularly useful for large numbers of rigid-rigid contacts. Compared to previous SPH coupling methods, the proposed concept stabilizes the fluid-rigid interface handling. It significantly reduces the computation times of SPH fluid simulations by enabling larger time steps. Performance gain factors of up to 58 compared to previous methods are presented. We illustrate the flexibility of the presented fluid-rigid coupling by integrating it into DFSPH, IISPH and a recent SPH solver for highly viscous fluids. We further show its applicability to a recent SPH solver for elastic objects. Large scenarios with up to 90M particles of various interacting materials and complex contact geometries with up to 90k rigid-rigid contacts are shown. We demonstrate the competitiveness of our proposed rigid body solver by comparing it to Bullet.
@article{ Gissler2019,
author= {Christoph Gissler and Andreas Peer and Stefan Band and Jan Bender and Matthias Teschner},
title= {Interlinked SPH Pressure Solvers for Strong Fluid-Rigid Coupling},
year= {2018},
journal= {ACM Trans. Graph.},
publisher= {ACM},
issue_date = {January 2019},
volume = {38},
number = {1},
month = jan,
year = {2019},
issn = {0730-0301},
pages = {5:1--5:13},
articleno = {5},
numpages = {13},
url = {http://doi.acm.org/10.1145/3284980},
doi = {10.1145/3284980},
address = {New York, NY, USA},
}
Distortion-Minimizing Injective Maps Between Surfaces
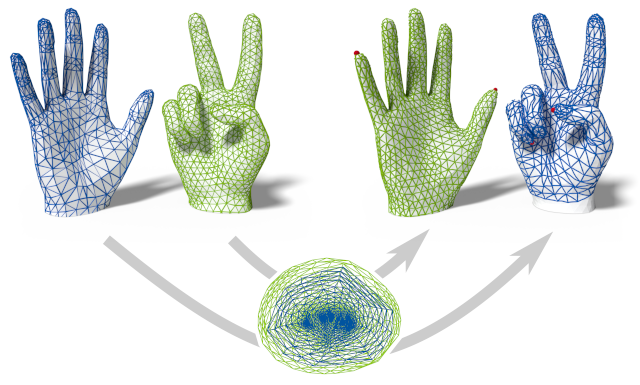
The problem of discrete surface parametrization, i.e. mapping a mesh to a planar domain, has been investigated extensively. We address the more general problem of mapping between surfaces. In particular, we provide a formulation that yields a map between two disk-topology meshes, which is continuous and injective by construction and which locally minimizes intrinsic distortion. A common approach is to express such a map as the composition of two maps via a simple intermediate domain such as the plane, and to independently optimize the individual maps. However, even if both individual maps are of minimal distortion, there is potentially high distortion in the composed map. In contrast to many previous works, we minimize distortion in an end-to-end manner, directly optimizing the quality of the composed map. This setting poses additional challenges due to the discrete nature of both the source and the target domain. We propose a formulation that, despite the combinatorial aspects of the problem, allows for a purely continuous optimization. Further, our approach addresses the non-smooth nature of discrete distortion measures in this context which hinders straightforward application of off-the-shelf optimization techniques. We demonstrate that, despite the challenges inherent to the more involved setting, discrete surface-to-surface maps can be optimized effectively.
@article{schmidt2019distortion,
author = {Schmidt, Patrick and Born, Janis and Campen, Marcel and Kobbelt, Leif},
title = {Distortion-Minimizing Injective Maps Between Surfaces},
journal = {ACM Transactions on Graphics},
issue_date = {November 2019},
volume = {38},
number = {6},
month = nov,
year = {2019},
articleno = {156},
url = {https://doi.org/10.1145/3355089.3356519},
doi = {10.1145/3355089.3356519},
publisher = {ACM},
address = {New York, NY, USA},
}
AlignNet-3D: Fast Point Cloud Registration of Partially Observed Objects
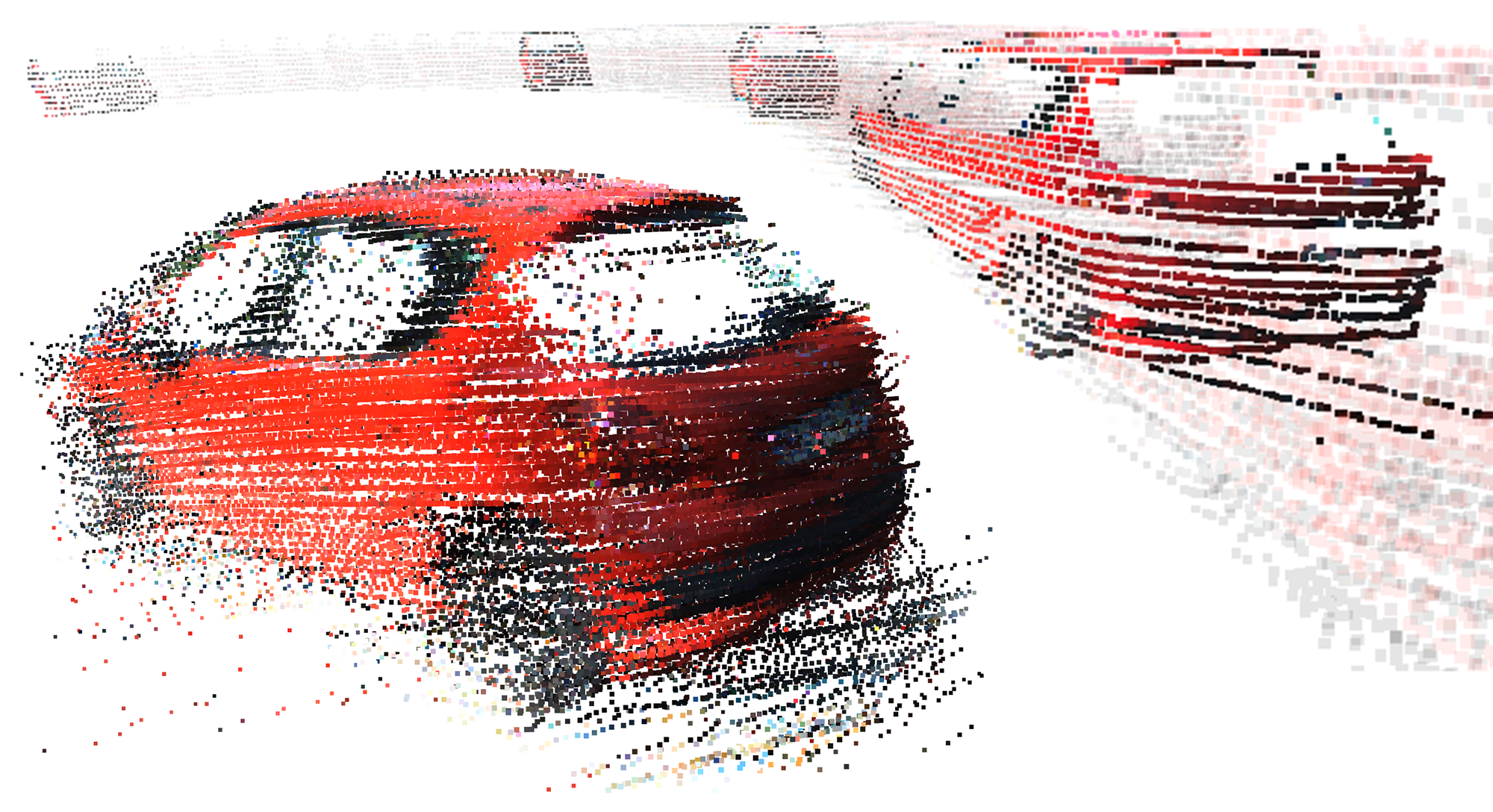
Methods tackling multi-object tracking need to estimate the number of targets in the sensing area as well as to estimate their continuous state. While the majority of existing methods focus on data association, precise state (3D pose) estimation is often only coarsely estimated by approximating targets with centroids or (3D) bounding boxes. However, in automotive scenarios, motion perception of surrounding agents is critical and inaccuracies in the vehicle close-range can have catastrophic consequences. In this work, we focus on precise 3D track state estimation and propose a learning-based approach for object-centric relative motion estimation of partially observed objects. Instead of approximating targets with their centroids, our approach is capable of utilizing noisy 3D point segments of objects to estimate their motion. To that end, we propose a simple, yet effective and efficient network, AlignNet-3D, that learns to align point clouds. Our evaluation on two different datasets demonstrates that our method outperforms computationally expensive, global 3D registration methods while being significantly more efficient.
@inproceedings{Gross193DV,
title = {AlignNet-3D: Fast Point Cloud Registration of Partially Observed Objects},
author = {Johannes Gro\ss and Aljo\v{s}a O\v{s}ep and Bastian Leibe},
booktitle = {International Conference on 3D Vision {(3DV)}},
year = {2019}
}
String-Based Synthesis of Structured Shapes
We propose a novel method to synthesize geometric models from a given class of context-aware structured shapes such as buildings and other man-made objects. Our central idea is to leverage powerful machine learning methods from the area of natural language processing for this task. To this end, we propose a technique that maps shapes to strings and vice versa, through an intermediate shape graph representation. We then convert procedurally generated shape repositories into text databases that in turn can be used to train a variational autoencoder which enables higher level shape manipulation and synthesis like, e.g., interpolation and sampling via its continuous latent space.
@article{Kalojanov2019,
journal = {Computer Graphics Forum},
title = {{String-Based Synthesis of Structured Shapes}},
author = {Javor Kalojanov and Isaak Lim and Niloy Mitra and Leif Kobbelt},
pages = {027-036},
volume= {38},
number= {2},
year = {2019},
note = {\URL{https://diglib.eg.org/bitstream/handle/10.1111/cgf13616/v38i2pp027-036.pdf}},
DOI = {10.1111/cgf.13616},
}
Large-Scale Object Mining for Object Discovery from Unlabeled Video
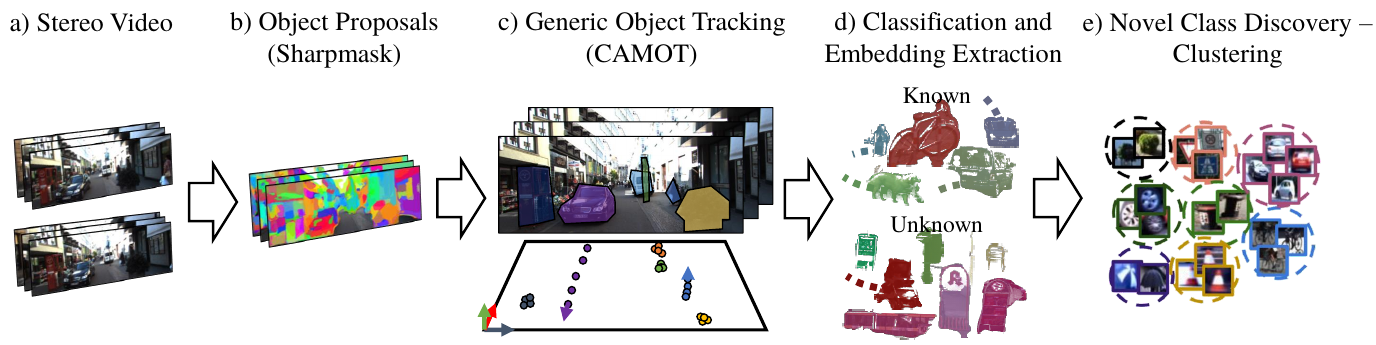
This paper addresses the problem of object discovery from unlabeled driving videos captured in a realistic automotive setting. Identifying recurring object categories in such raw video streams is a very challenging problem. Not only do object candidates first have to be localized in the input images, but many interesting object categories occur relatively infrequently. Object discovery will therefore have to deal with the difficulties of operating in the long tail of the object distribution. We demonstrate the feasibility of performing fully automatic object discovery in such a setting by mining object tracks using a generic object tracker. In order to facilitate further research in object discovery, we will release a collection of more than 360'000 automatically mined object tracks from 10+ hours of video data (560'000 frames). We use this dataset to evaluate the suitability of different feature representations and clustering strategies for object discovery.
@article{Osep19ICRA,
author = {O\v{s}ep, Aljo\v{s}a and Voigtlaender, Paul and Luiten, Jonathon and Breuers, Stefan and Leibe, Bastian},
title = {Large-Scale Object Mining for Object Discovery from Unlabeled Video},
journal = {ICRA},
year = {2019}
}
4D Generic Video Object Proposals

Many high-level video understanding methods require input in the form of object proposals. Currently, such proposals are predominantly generated with the help of networks that were trained for detecting and segmenting a set of known object classes, which limits their applicability to cases where all objects of interest are represented in the training set. This is a restriction for automotive scenarios, where unknown objects can frequently occur. We propose an approach that can reliably extract spatio-temporal object proposals for both known and unknown object categories from stereo video. Our 4D Generic Video Tubes (4D-GVT) method leverages motion cues, stereo data, and object instance segmentation to compute a compact set of video-object proposals that precisely localizes object candidates and their contours in 3D space and time. We show that given only a small amount of labeled data, our 4D-GVT proposal generator generalizes well to real-world scenarios, in which unknown categories appear. It outperforms other approaches that try to detect as many objects as possible by increasing the number of classes in the training set to several thousand.
@inproceedings{Osep19ICRA,
author = {O\v{s}ep, Aljo\v{s}a and Voigtlaender, Paul and Weber, Mark and Luiten, Jonathon and Leibe, Bastian},
title = {4D Generic Video Object Proposals},
booktitle = {ICRA},
year = {2020}
}
Turbulent Micropolar SPH Fluids with Foam
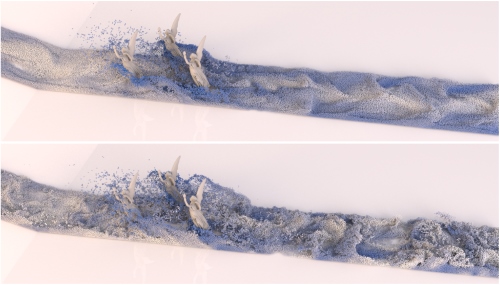
In this paper we introduce a novel micropolar material model for the simulation of turbulent inviscid fluids. The governing equations are solved by using the concept of Smoothed Particle Hydrodynamics (SPH). As already investigated in previous works, SPH fluid simulations suffer from numerical diffusion which leads to a lower vorticity, a loss in turbulent details and finally in less realistic results. To solve this problem we propose a micropolar fluid model. The micropolar fluid model is a generalization of the classical Navier-Stokes equations, which are typically used in computer graphics to simulate fluids. In contrast to the classical Navier-Stokes model, micropolar fluids have a microstructure and therefore consider the rotational motion of fluid particles. In addition to the linear velocity field these fluids also have a field of microrotation which represents existing vortices and provides a source for new ones. However, classical micropolar materials are viscous and the translational and the rotational motion are coupled in a dissipative way. Since our goal is to simulate turbulent fluids, we introduce a novel modified micropolar material for inviscid fluids with a non-dissipative coupling. Our model can generate realistic turbulences, is linear and angular momentum conserving, can be easily integrated in existing SPH simulation methods and its computational overhead is negligible. Another important visual feature of turbulent liquids is foam. Therefore, we present a post-processing method which considers microrotation in the foam particle generation. It works completely automatic and requires only one user-defined parameter to control the amount of foam.
@Article{BKKW19,
author = {Bender, Jan and Koschier, Dan and Kugelstadt, Tassilo and Weiler, Marcel},
title = {Turbulent Micropolar SPH Fluids with Foam},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2019},
publisher = {IEEE},
volume={25},
number={6},
pages={2284-2295},
doi={10.1109/TVCG.2018.2832080},
ISSN={1077-2626},
month={June},
}
Voxel-Based Edge Bundling Trough Direction-Aware Kernel Smoothing
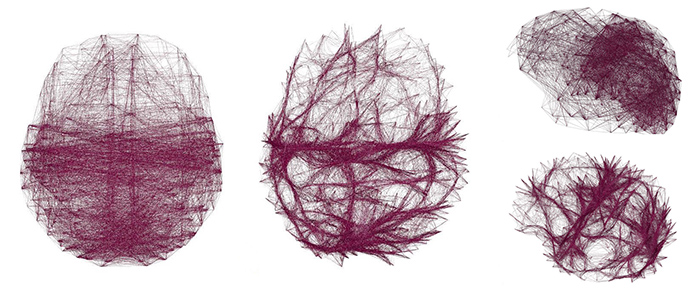
Relational data with a spatial embedding and depicted as node-link diagram is very common, e.g., in neuroscience, and edge bundling is one way to increase its readability or reveal hidden structures. This article presents a 3D extension to kernel density estimation-based edge bundling that is meant to be used in an interactive immersive analysis setting. This extension adds awareness of the edges’ direction when using kernel smoothing and thus implicitly supports both directed and undirected graphs. The method generates explicit bundles of edges, which can be analyzed and visualized individually and as sufficient as possible for a given application context, while it scales linearly with the input size.
@article{ZIELASKO2019,
title = "Voxel-based edge bundling through direction-aware kernel smoothing",
journal = "Computers & Graphics",
volume = "83",
pages = "87 - 96",
year = "2019",
issn = "0097-8493",
doi = "https://doi.org/10.1016/j.cag.2019.06.008",
url = "http://www.sciencedirect.com/science/article/pii/S0097849319301025",
author = "Daniel Zielasko and Xiaoqing Zhao and Ali Can Demiralp and Torsten W. Kuhlen and Benjamin Weyers"}
Combining PReMVOS with Box-Level Tracking for the 2019 DAVIS Challenge
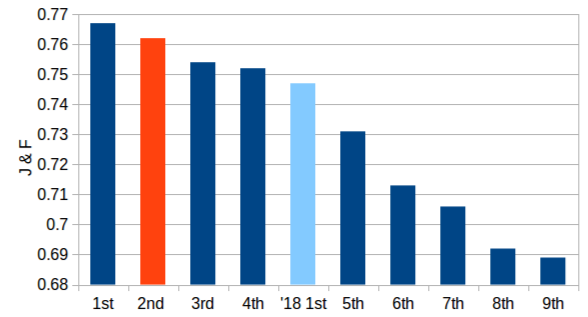
Recently a number of different approaches have beenproposed for tackling the task of Video Object Segmentation(VOS). In this paper we compare and contrast two particu-larly powerful methods, PReMVOS (Proposal-generation,Refinement and Merging for VOS), and BoLTVOS (Box-Level Tracking for VOS). PReMVOS follows a tracking-by-detection framework in which a set of object proposals aregenerated per frame and are then linked into tracks overtime by optical flow and appearance similarity cues. In con-trast, BoLTVOS uses a Siamese architecture to directly de-tect the object to be tracked based on its similarity to thegiven first-frame object. Although BoLTVOS can outper-form PReMVOS when the number of objects to be trackedis small, it does not scale as well to tracking multiple ob-jects. Finally we develop a model which combines bothBoLTVOS and PReMVOS and achieves aJ&Fscore of76.2% on the DAVIS 2017 test-challenge benchmark, re-sulting in a 2nd place finish in the 2019 DAVIS challengeon semi-supervised VOS.
@article{LuitenDAVIS2019,
title={Combining PReMVOS with Box-Level Tracking for the 2019 DAVIS Challenge},
author={Luiten, Jonathon and Voigtlaender, Paul and Leibe, Bastian},
booktitle = {The 2019 DAVIS Challenge on Video Object Segmentation - CVPR Workshops},
year = {2019}
}
A Convolutional Decoder for Point Clouds using Adaptive Instance Normalization
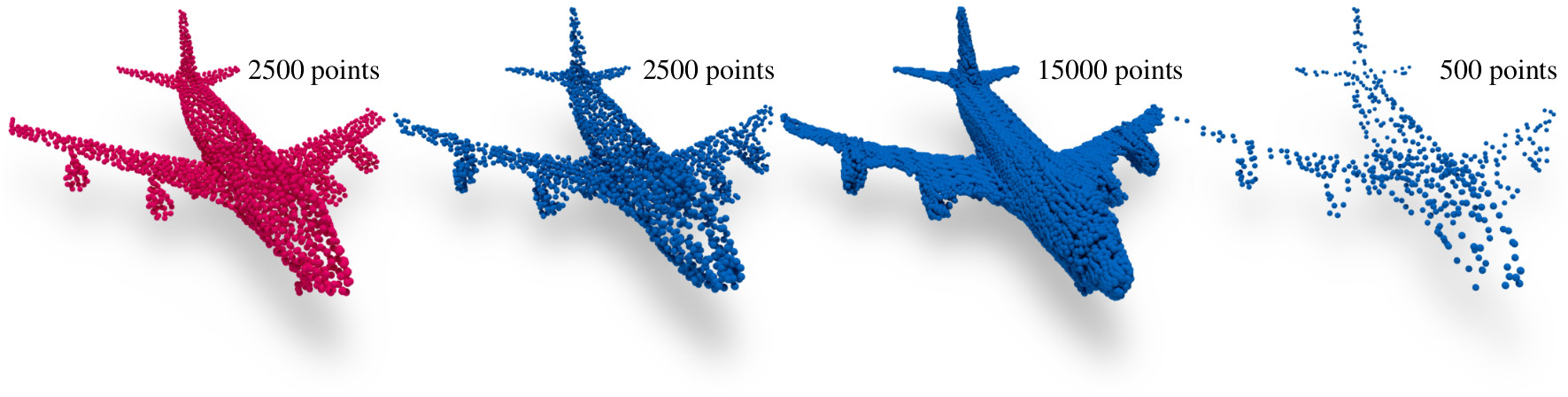
Automatic synthesis of high quality 3D shapes is an ongoing and challenging area of research. While several data-driven methods have been proposed that make use of neural networks to generate 3D shapes, none of them reach the level of quality that deep learning synthesis approaches for images provide. In this work we present a method for a convolutional point cloud decoder/generator that makes use of recent advances in the domain of image synthesis. Namely, we use Adaptive Instance Normalization and offer an intuition on why it can improve training. Furthermore, we propose extensions to the minimization of the commonly used Chamfer distance for auto-encoding point clouds. In addition, we show that careful sampling is important both for the input geometry and in our point cloud generation process to improve results. The results are evaluated in an auto-encoding setup to offer both qualitative and quantitative analysis. The proposed decoder is validated by an extensive ablation study and is able to outperform current state of the art results in a number of experiments. We show the applicability of our method in the fields of point cloud upsampling, single view reconstruction, and shape synthesis.
@article{Lim:2019:ConvolutionalDecoder,
author = "Lim, Isaak and Ibing, Moritz and Kobbelt, Leif",
title = "A Convolutional Decoder for Point Clouds using Adaptive Instance Normalization",
journal = "Computer Graphics Forum",
volume = 38,
number = 5,
year = 2019
}
Visual Person Understanding through Multi-Task and Multi-Dataset Learning
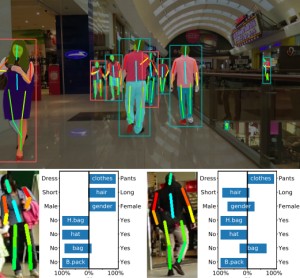
We address the problem of learning a single model for person re-identification, attribute classification, body part segmentation, and pose estimation. With predictions for these tasks we gain a more holistic understanding of persons, which is valuable for many applications. This is a classical multi-task learning problem. However, no dataset exists that these tasks could be jointly learned from. Hence several datasets need to be combined during training, which in other contexts has often led to reduced performance in the past. We extensively evaluate how the different task and datasets influence each other and how different degrees of parameter sharing between the tasks affect performance. Our final model matches or outperforms its single-task counterparts without creating significant computational overhead, rendering it highly interesting for resource-constrained scenarios such as mobile robotics.
@inproceedings{Pfeiffer19GCPR,
title = {Visual Person Understanding Through Multi-task and Multi-dataset Learning},
author = {Kilian Pfeiffer and Alexander Hermans and Istv\'{a}n S\'{a}r\'{a}ndi and Mark Weber and Bastian Leibe},
booktitle = {German Conference on Pattern Recognition (GCPR)},
date = {2019}
}
Smoothed Particle Hydrodynamics for Physically-Based Simulation of Fluids and Solids

Graphics research on Smoothed Particle Hydrodynamics (SPH) has produced fantastic visual results that are unique across the board of research communities concerned with SPH simulations. Generally, the SPH formalism serves as a spatial discretization technique, commonly used for the numerical simulation of continuum mechanical problems such as the simulation of fluids, highly viscous materials, and deformable solids. Recent advances in the field have made it possible to efficiently simulate massive scenes with highly complex boundary geometries on a single PC. Moreover, novel techniques allow to robustly handle interactions among various materials. As of today, graphics-inspired pressure solvers, neighborhood search algorithms, boundary formulations, and other contributions often serve as core components in commercial software for animation purposes as well as in computer-aided engineering software.
This tutorial covers various aspects of SPH simulations. Governing equations for mechanical phenomena and their SPH discretizations are discussed. Concepts and implementations of core components such as neighborhood search algorithms, pressure solvers, and boundary handling techniques are presented. Implementation hints for the realization of SPH solvers for fluids, elastic solids, and rigid bodies are given. The tutorial combines the introduction of theoretical concepts with the presentation of actual implementations.
@inproceedings {KBST19,
title = "Smoothed Particle Hydrodynamics for Physically-Based Simulation of Fluids and Solids",
author = "Dan Koschier and Jan Bender and Barbara Solenthaler and Matthias Teschner",
year = "2019",
booktitle = "EUROGRAPHICS 2019 Tutorials",
publisher = "Eurographics Association"
}
ACAP: Sparse Data Driven Mesh Deformation
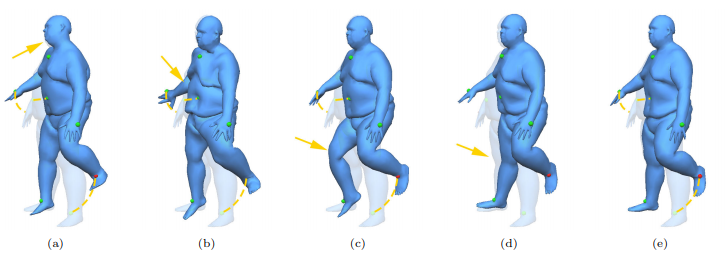
Example-based mesh deformation methods are powerful tools for realistic shape editing. However, existing techniques typically combine all the example deformation modes, which can lead to overfitting, i.e. using an overly complicated model to explain the user-specified deformation. This leads to implausible or unstable deformation results, including unexpected global changes outside the region of interest. To address this fundamental limitation, we propose a sparse blending method that automatically selects a smaller number of deformation modes to compactly describe the desired deformation. This along with a suitably chosen deformation basis including spatially localized deformation modes leads to significant advantages, including more meaningful, reliable, and efficient deformations because fewer and localized deformation modes are applied. To cope with large rotations, we develop a simple but effective representation based on polar decomposition of deformation gradients, which resolves the ambiguity of large global rotations using an as-consistent-as-possible global optimization. This simple representation has a closed form solution for derivatives, making it efficient for our sparse localized representation and thus ensuring interactive performance. Experimental results show that our method outperforms state-of-the-art data-driven mesh deformation methods, for both quality of results and efficiency.
@article{gao2019sparse,
title={Sparse data driven mesh deformation},
author={Gao, Lin and Lai, Yu-Kun and Yang, Jie and Ling-Xiao, Zhang and Xia, Shihong and Kobbelt, Leif},
journal={IEEE transactions on visualization and computer graphics},
year={2019},
publisher={IEEE}
}
Feature Tracking Utilizing a Maximum-Weight Independent Set Problem
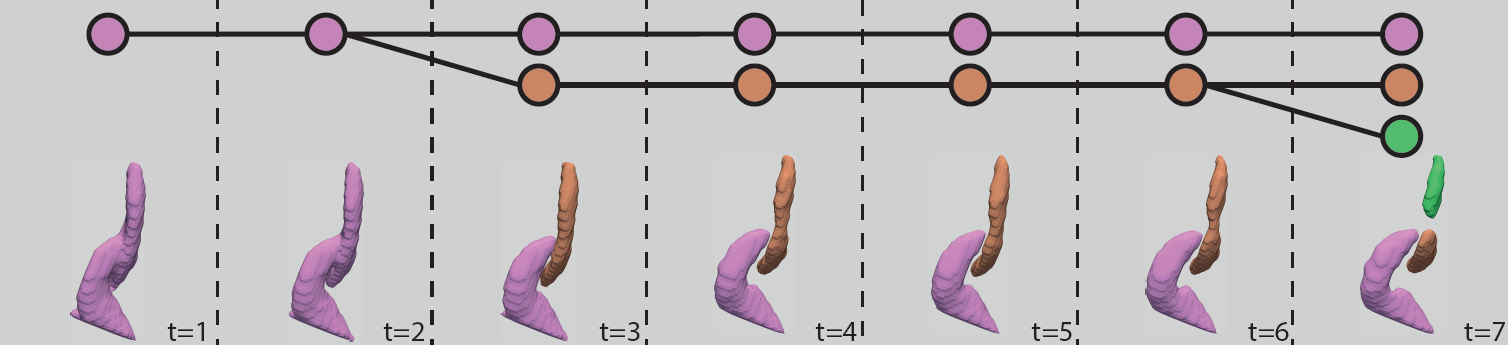
Tracking the temporal evolution of features in time-varying data remains a combinatorially challenging problem. A recent method models event detection as a maximum-weight independent set problem on a graph representation of all possible explanations [35]. However, optimally solving this problem is NP-hard in the general case. Following the approach by Schnorr et al., we propose a new algorithm for event detection. Our algorithm exploits the modelspecific structure of the independent set problem. Specifically, we show how to traverse potential explanations in such a way that a greedy assignment provides reliably good results. We demonstrate the effectiveness of our approach on synthetic and simulation data sets, the former of which include ground-truth tracking information which enable a quantitative evaluation. Our results are within 1% of the theoretical optimum and comparable to an approximate solution provided by a state-of-the-art optimization package. At the same time, our algorithm is significantly faster.
@InProceedings{Schnorr2019,
author = {Andrea Schnorr, Dirk Norbert Helmrich, Hank Childs, Torsten Wolfgang Kuhlen, Bernd Hentschel},
title = {{Feature Tracking Utilizing a Maximum-Weight Independent Set Problem}},
booktitle = {9th IEEE Symposium on Large Data Analysis and Visualization},
year = {2019}
}
Volume Maps: An Implicit Boundary Representation for SPH
In this paper, we present a novel method for the robust handling of static and dynamic rigid boundaries in Smoothed Particle Hydrodynamics (SPH) simulations. We build upon the ideas of the density maps approach which has been introduced recently by Koschier and Bender. They precompute the density contributions of solid boundaries and store them on a spatial grid which can be efficiently queried during runtime. This alleviates the problems of commonly used boundary particles, like bumpy surfaces and inaccurate pressure forces near boundaries. Our method is based on a similar concept but we precompute the volume contribution of the boundary geometry and store it on a grid. This maintains all benefits of density maps but offers a variety of advantages which are demonstrated in several experiments. Firstly, in contrast to the density maps method we can compute derivatives in the standard SPH manner by differentiating the kernel function. This results in smooth pressure forces, even for lower map resolutions, such that precomputation times and memory requirements are reduced by more than two orders of magnitude compared to density maps. Furthermore, this directly fits into the SPH concept so that volume maps can be seamlessly combined with existing SPH methods. Finally, the kernel function is not baked into the map such that the same volume map can be used with different kernels. This is especially useful when we want to incorporate common surface tension or viscosity methods that use different kernels than the fluid simulation.
@inproceedings{Bender2019,
author = {Jan Bender and Tassilo Kugelstadt and Marcel Weiler and Dan Koschier},
title = {Volume Maps: An Implicit Boundary Representation for SPH},
booktitle = {Proceedings of ACM SIGGRAPH Conference on Motion, Interaction and Games},
series = {MIG '19},
year = {2019},
publisher = {ACM}
}
Video Instance Segmentation 2019: A winning approach for combined Detection, Segmentation, Classification and Tracking.
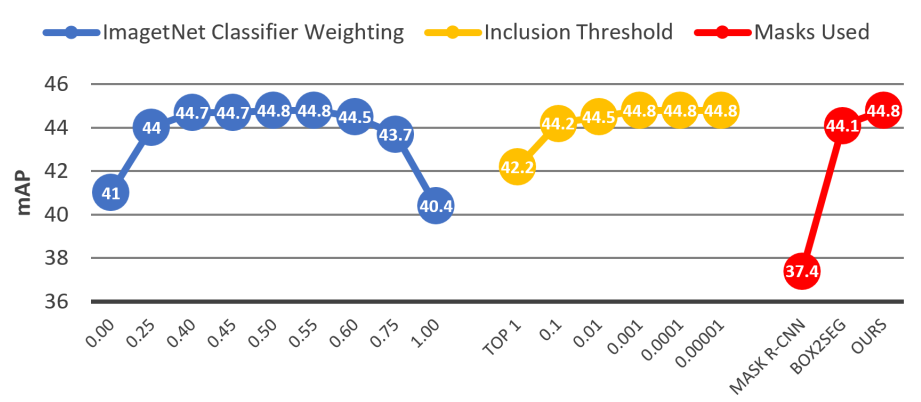
Video Instance Segmentation (VIS) is the task of localizing all objects in a video, segmenting them, tracking them throughout the video and classifying them into a set of predefined classes. In this work, divide VIS into these four parts: detection, segmentation, tracking and classification. We then develop algorithms for performing each of these four sub tasks individually, and combine these into a complete solution for VIS. Our solution is an adaptation of UnOVOST, the current best performing algorithm for Unsupervised Video Object Segmentation, to this VIS task. We benchmark our algorithm on the 2019 YouTube-VIS Challenge, where we obtain first place with an mAP score of 46.7%.
@inproceedings{Luiten19ICCVW_Video,
author = {Jonathon Luiten and Philip Torr and Bastian Leibe},
title = {{Video Instance Segmentation 2019: A winning approach for combined Detection, Segmentation, Classification and Tracking.}},
booktitle = {The 2nd Large-scale Video Object Segmentation Challenge: International Conference on Computer Vision Workshop (ICCVW)},
year = {2019},
}
UnOVOST: Unsupervised Offline Video Object Segmentation and Tracking for the 2019 Unsupervised DAVIS Challenge
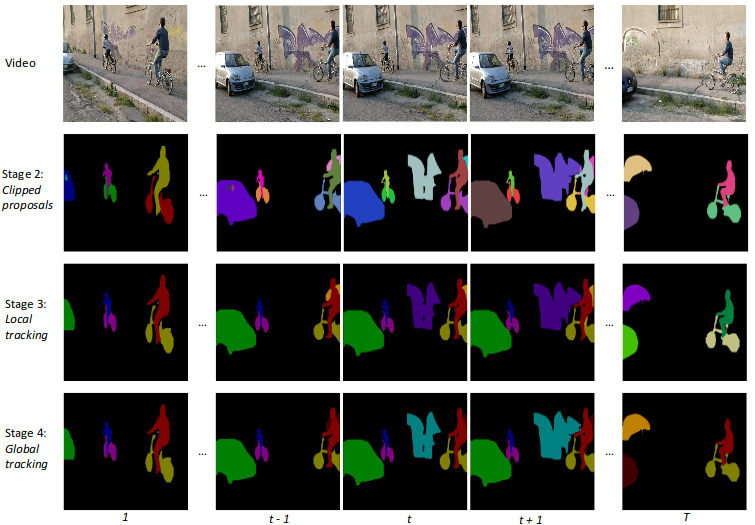
We address Unsupervised Video Object Segmentation (UVOS), the task of automatically generating accurate pixelmasks for salient objects in a video sequence and of track-ing these objects consistently through time, without any in-formation about which objects should be tracked. Towardssolving this task, we present UnOVOST (Unsupervised Of-fline Video Object Segmentation and Tracking) as a simpleand generic algorithm which is able to track a large varietyof objects. This algorithm hierarchically builds up tracksin five stages. First, object proposal masks are generatedusing Mask R-CNN. Second, masks are sub-selected andclipped so that they do not overlap in the image domain.Third, tracklets are generated by grouping object propos-als that are strongly temporally consistent with each otherunder optical flow warping. Fourth, tracklets are mergedinto long-term consistent object tracks using their temporalconsistency and an appearance similarity metric calculatedusing an object re-identification network. Finally, the mostsalient object tracks are selected based on temporal tracklength and detection confidence scores. We evaluate ourapproach on the DAVIS 2017 Unsupervised dataset and ob-tain state-of-the-art performance with a meanJ&Fscoreof 58% on the test-dev benchmark. Our approach furtherachieves first place in the DAVIS 2019 Unsupervised VideoObject Segmentation Challenge with a mean ofJ&Fscoreof 56.4% on the test-challenge benchmark.
@article{ZulfikarLuitenUnOVOST,
title={UnOVOST: Unsupervised Offline Video Object Segmentation and Tracking for the 2019 Unsupervised DAVIS Challenge},
author={Zulfikar, Idil Esen and Luiten, Jonathon and Leibe, Bastian}
booktitle = {The 2019 DAVIS Challenge on Video Object Segmentation - CVPR Workshops},
year = {2019}
}
An Optimized Source Term Formulation for Incompressible SPH
Incompressible SPH (ISPH) is a promising concept for the pressure computation in SPH. It works with large timesteps and the underlying pressure Poisson equation (PPE) can be solved very efficiently. Still, various aspects of current ISPH formulations can be optimized.
This paper discusses issues of the two standard source terms that are typically employed in PPEs, i.e. density invariance (DI) and velocity divergence (VD). We show that the DI source term suffers from significant artificial viscosity, while the VD source term suffers from particle disorder and volume loss.
As a conclusion of these findings, we propose a novel source term handling. A first PPE is solved with the VD source term to compute a divergence-free velocity field with minimized artificial viscosity. To address the resulting volume error and particle disorder, a second PPE is solved to improve the sampling quality. The result of the second PPE is used for a particle shift (PS) only. The divergence-free velocity field - computed from the first PPE - is not changed, but only resampled at the updated particle positions. Thus, the proposed source term handling incorporates velocity divergence and particle shift (VD+PS).
@Article{Cornelis2019,
author = {Cornelis, Jens and Bender, Jan and Gissler, Christoph and Ihmsen, Markus and Teschner, Matthias},
title = {An optimized source term formulation for incompressible SPH},
journal = {The Visual Computer},
year = {2019},
month = {Apr},
volume={35},
number={4},
pages={579--590},
issn = {1432-2315},
day = {20},
doi = {10.1007/s00371-018-1488-8},
url = {https://doi.org/10.1007/s00371-018-1488-8},
}
Form Finding of Stress Adapted Folding as a Lightweight Structure Under Different Load Cases
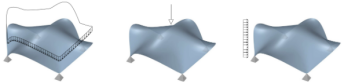
In steel construction, the use of folds is limited to longitudinal folds (e.g. trapezoidal sheets). The efficiency of creases can be increased by aligning the folding pattern to the principal stresses or to their directions. This paper presents a form-finding approach to use the material as homogeneously as possible. In addition to the purely geometric alignment according to the stress directions, it also allows the stress intensity to be taken into account during form-finding. A trajectory mesh of the principle stresses is generated on the basis of which the structure is derived. The relationships between the stress lines distance, progression and stress intensity are discussed and implemented in the approaches of form-finding. Building on this, this paper additionally deals with the question of which load case is the most effective basis for designing the crease pattern when several load cases can act simultaneously.
@article {Musto:2019:2518-6582:1,
title = "Form finding of stress adapted folding as a lightweight structure under different load cases",
journal = "Proceedings of IASS Annual Symposia",
parent_itemid = "infobike://iass/piass",
publishercode ="iass",
year = "2019",
volume = "2019",
number = "13",
publication date ="2019-10-07T00:00:00",
pages = "1-8",
itemtype = "ARTICLE",
issn = "2518-6582",
eissn = "2518-6582",
url = "https://www.ingentaconnect.com/content/iass/piass/2019/00002019/00000013/art00006",
keyword = "lightweight-construction, folding, Mixed-Integer Quadrangulation, principle stress lines",
author = "Musto, Juan and Lyon, Max and Trautz, Martin and Kobbelt, Leif",
abstract = "In steel construction, the use of folds is limited to longitudinal folds (e.g. trapezoidal sheets). The efficiency of creases can be increased by aligning the folding pattern to the principal stresses or to their directions. This paper presents a form-finding approach to use the material
as homogeneously as possible. In addition to the purely geometric alignment according to the stress directions, it also allows the stress intensity to be taken into account during form-finding. A trajectory mesh of the principle stresses is generated on the basis of which the structure is
derived. The relationships between the stress lines distance, progression and stress intensity are discussed and implemented in the approaches of form-finding. Building on this, this paper additionally deals with the question of which load case is the most effective basis for designing
the crease pattern when several load cases can act simultaneously.",
}
Exploring the Combination of PReMVOS, BoLTVOS and UnOVOST for the 2019 YouTube-VOS Challenge
Video Object Segmentation is the task of tracking and segmenting objects in a video given the first-frame mask of objects to be tracked. There have been a number of different successful paradigms for tackling this task, from creating object proposals and linking them in time as in PReMVOS, to detecting objects to be tracked conditioned on the given first-frame as in BoLTVOS, and creating tracklets based on motion consistency before merging these into long-term tracks as in UnOVOST. In this paper we explore how these three different approaches can be combined into a novel Video Object Segmentation algorithm. We evaluate our approach on the 2019 Youtube-VOS challenge where we obtain 6th place with an overall score of 71.5%.
@inproceedings{Luiten19ICCVW_Video,
author = {Jonathon Luiten and Paul Voigtlaender and Bastian Leibe},
title = {{Exploring the Combination of PReMVOS, BoLTVOS and UnOVOST for the 2019 YouTube-VOS Challenge}},
booktitle = {The 2nd Large-scale Video Object Segmentation Challenge: International Conference on Computer Vision Workshop (ICCVW)},
year = {2019},
}
Influence of Directivity on the Perception of Embodied Conversational Agents' Speech

Embodied conversational agents become more and more important in various virtual reality applications, e.g., as peers, trainers or therapists. Besides their appearance and behavior, appropriate speech is required for them to be perceived as human-like and realistic. Additionally to the used voice signal, also its auralization in the immersive virtual environment has to be believable. Therefore, we investigated the effect of adding directivity to the speech sound source. Directivity simulates the orientation dependent auralization with regard to the agent's head orientation. We performed a one-factorial user study with two levels (n=35) to investigate the effect directivity has on the perceived social presence and realism of the agent's voice. Our results do not indicate any significant effects regarding directivity on both variables covered. We account this partly to an overall too low realism of the virtual agent, a not overly social utilized scenario and generally high variance of the examined measures. These results are critically discussed and potential further research questions and study designs are identified.
@inproceedings{Wendt2019,
author = {Wendt, Jonathan and Weyers, Benjamin and Stienen, Jonas and B\"{o}nsch, Andrea and Vorl\"{a}nder, Michael and Kuhlen, Torsten W.},
title = {Influence of Directivity on the Perception of Embodied Conversational Agents' Speech},
booktitle = {Proceedings of the 19th ACM International Conference on Intelligent Virtual Agents},
series = {IVA '19},
year = {2019},
isbn = {978-1-4503-6672-4},
location = {Paris, France},
pages = {130--132},
numpages = {3},
url = {http://doi.acm.org/10.1145/3308532.3329434},
doi = {10.1145/3308532.3329434},
acmid = {3329434},
publisher = {ACM},
address = {New York, NY, USA},
keywords = {directional 3d sound, social presence, virtual acoustics, virtual agents},
}
Passive Haptic Menus for Desk-Based and HMD-Projected Virtual Reality
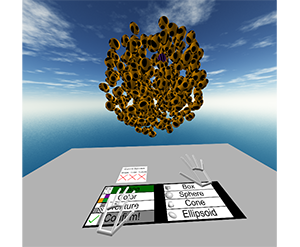
In this work we evaluate the impact of passive haptic feedback on touch-based menus, given the constraints and possibilities of a seated, desk-based scenario in VR. Therefore, we compare a menu that once is placed on the surface of a desk and once mid-air on a surface in front of the user. The study design is completed by two conditions without passive haptic feedback. In the conducted user study (n = 33) we found effects of passive haptics (present vs- non-present) and menu alignment (desk vs. mid-air) on the task performance and subjective look & feel, however the race between the conditions was close. An overall winner was the mid-air menu with passive haptic feedback, which however raises hardware requirements.
@inproceedings{zielasko2019menu,
title={{Passive Haptic Menus for Desk-Based and HMD-Projected Virtual Reality}},
author={Zielasko, Daniel and Kr{\"u}ger Marcel and Weyers, Benjamin and Kuhlen, Torsten W},
booktitle={Proc. of IEEE VR Workshop on Everyday Virtual Reality},
year={2019}
}
A Non-Stationary Office Desk Substitution for Desk-Based and HMD-Projected Virtual Reality
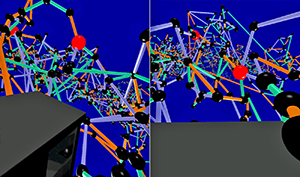
The ongoing migration of HMDs to the consumer market also allows the integration of immersive environments into analysis workflows that are often bound to an (office) desk. However, a critical factor when considering VR solutions for professional applications is the prevention of cybersickness. In the given scenario the user is usually seated and the surrounding real world environment is very dominant, where the most dominant part is maybe the desk itself. Including this desk in the virtual environment could serve as a resting frame and thus reduce cybersickness next to a lot of further possibilities. In this work, we evaluate the feasibility of a substitution like this in the context of a visual data analysis task involving travel, and measure the impact on cybersickness as well as the general task performance and presence. In the conducted user study (n=52), surprisingly, and partially in contradiction to existing work, we found no significant differences for those core measures between the control condition without a virtual table and the condition containing a virtual table. However, the results also support the inclusion of a virtual table in desk-based use cases.
@inproceedings{zielasko2019travel,
title={{A Non-Stationary Office Desk Substitution for Desk-Based and HMD-Projected Virtual Reality}},
author={Zielasko, Daniel and Weyers, Benjamin and Kuhlen, Torsten W},
booktitle ={Proc. of IEEE VR Workshop on Immersive Sickness Prevention},
year={2019}
}
Evaluation of Omnipresent Virtual Agents Embedded as Temporarily Required Assistants in Immersive Environments

When designing the behavior of embodied, computer-controlled, human-like virtual agents (VA) serving as temporarily required assistants in virtual reality applications, two linked factors have to be considered: the time the VA is visible in the scene, defined as presence time (PT), and the time till the VA is actually available for support on a user’s calling, defined as approaching time (AT).
Complementing a previous research on behaviors with a low VA’s PT, we present the results of a controlled within-subjects study investigating behaviors by which the VA is always visible, i.e., behaviors with a high PT. The two behaviors affecting the AT tested are: following, a design in which the VA is omnipresent and constantly follows the users, and busy, a design in which theVAis self-reliantly spending time nearby the users and approaches them only if explicitly asked for. The results indicate that subjects prefer the following VA, a behavior which also leads to slightly lower execution times compared to busy.
@InProceedings{Boensch2019c,
author = {Andrea B\"{o}nsch and Jan Hoffmann and Jonathan Wendt and Torsten W. Kuhlen},
title = {{Evaluation of Omnipresent Virtual Agents Embedded as Temporarily Required Assistants in Immersive Environments}},
booktitle = {IEEE Virtual Humans and Crowds for Immersive Environments (VHCIE)},
year = {2019},
doi={10.1109/VHCIE.2019.8714726},
month={March}
}
An Empirical Lab Study Investigating If Higher Levels of Immersion Increase the Willingness to Donate

Technological innovations have a growing relevance for charitable donations, as new technologies shape the way we perceive and approach digital media. In a between-subjects study with sixty-one volunteers, we investigated whether a higher degree of immersion for the potential donor can yield more donations for non-governmental organizations. Therefore, we compared the donations given after experiencing a video-based, an augmented-reality-based, or a virtual-reality-based scenery with a virtual agent, representing a war victimized Syrian boy talking about his losses. Our initial results indicate that the immersion has no impact. However, the donor’s perceived innovativeness of the used technology might be an influencing factor.
@InProceedings{Boensch2019b,
author = {Andrea B\"{o}nsch and Alexander Kies and Moritz Jörling and Stefanie Paluch and Torsten W. Kuhlen},
title = {{An Empirical Lab Study Investigating If Higher Levels of Immersion Increase the Willingness to Donatee}},
booktitle = {IEEE Virtual Humans and Crowds for Immersive Environments (VHCIE)},
year = {2019}
pages={1-4},
doi={10.1109/VHCIE.2019.8714622},
month={March}
}
Volumetric Video Capture Using Unsynchronized, Low-Cost Cameras

Volumetric video can be used in virtual and augmented reality applications to show detailed animated performances by human actors. In this paper, we describe a volumetric capture system based on a photogrammetry cage with unsynchronized, low-cost cameras which is able to generate high-quality geometric data for animated avatars. This approach requires, inter alia, a subsequent synchronization of the captured videos.
@Article{Boensch2019a,
author = {Andrea Bönsch, Andrew Feng, Parth Patel and Ari Shapiro},
title = {{Volumetric Video Capture using Unsynchronized, Low-cost Cameras}},
booktitle= {Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019)},
year = {2019},
volume = {1},
pages = {255--261}
publisher={SciTePress},
organization={INSTICC},
doi={10.5220/0007373202550261},
isbn={978-989-758-354-4}
}
Joint Locomotion with Virtual Agents in Immersive Environments

Many applications in the realm of social virtual reality require reasonable locomotion patterns for their embedded, intelligent virtual agents (VAs). The two main research areas covered in the literature are pure inter-agent-dynamics for crowd simulations and user-agent-dynamics in, e.g., pedestrian scenarios. However, social locomotion, defined as a joint locomotion of a social group consisting of a human user and one to several VAs in the role of accompanying interaction partners, has not been carefully investigated yet. I intend to close this gap by contributing locomotion models for the social group’s VAs. Thereby, I plan to evaluate the effects of the VAs’ locomotion patterns on a user’s perceived degree of immersion, comfort, and social presence.
@InProceedings{Boensch2019d,
author = {Andrea B\"{o}nsch},
title = {Locomotion with Virtual Agents in the Realm of Social Virtual Reality},
booktitle = {Doctoral Consortium at IEEE Virtual Reality Conference 2018},
year = {2019}
}
Beanspruchungsoptimierte Faltungen aus Stahl für selbsttragende Raumfaltwerke
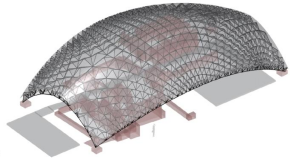
Der Einsatz von Faltungen beschränkt sich im Bauwesen auf Longitudinalfaltungen (Trapezbleche) und regelmäßige Faltungen. Raumfaltwerke und Faltleichtbauplatten, räumlich gekrümmte und dreidimensionale Flächentragwerke sind Desiderate eines Leichtbaus mit Stahlblechen. Raumfaltwerke bestehen vorwiegend aus regelmäßigen Faltmuster, die auf Tesselierung mit Primitivflächen (Drei-und Vierecke) basieren. Um die Effizienz dieser Leichtbaustrukturen zu verbessern, liegt es nahe, statt regelmäßige und auf geometrischen Prinzipien basierende Faltmuster umzusetzen, Faltmuster nach Maßgabe nach Maßgabe der der Beanspruchungen bzw. der Beanspruchungsverteilung anzuwenden. Hierzu ist ein Formfindungsprozess zu entwickeln, der auf der Generierung eines Trajektoriennetzes basiert, das aus dem maßgeblichen Lastfall (formgebenden Lastfall) abgeleitet wird. Der Vergleich des Masseneinsatzes und der Traglast der Faltungen, die auf geometrischer Basis erzeugt wurden mit einer auf Basis des Trajektoriennetzes entwickelten Faltung zeigt die Veränderung der Effizienz .
@article{https://doi.org/10.1002/bate.201900024,
author = {Musto, Juan and Lyon, Max and Trautz, Martin and Kobbelt, Leif},
title = {Beanspruchungsoptimierte Faltungen aus Stahl für selbsttragende Raumfaltwerke},
journal = {Bautechnik},
volume = {96},
number = {12},
pages = {902-911},
keywords = {Leichtbau, Faltungen, Hauptspannungstrajektorien, Mixed-Integer Quadrangulation, lightweight-construction, folgings, principle stress trajectories, mixed-integer quadrangulation, Stahlbau, Leichtbau, Steel construction, lightweight construction},
doi = {https://doi.org/10.1002/bate.201900024},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1002/bate.201900024},
eprint = {https://onlinelibrary.wiley.com/doi/pdf/10.1002/bate.201900024},
abstract = {Abstract Der Einsatz von Faltungen beschränkt sich im Bauwesen auf Longitudinalfaltungen (Trapezbleche) und regelmäßige Faltungen. Raumfaltwerke und Faltleichtbauplatten, räumlich gekrümmte und dreidimensionale Flächentragwerke sind Desiderate eines Leichtbaus mit Stahlblechen. Raumfaltwerke bestehen vorwiegend aus regelmäßigen Faltmustern, die auf Tesselierung mit Primitivflächen (Drei- und Vierecke) basieren. Um die Effizienz dieser Leichtbaustrukturen zu verbessern, liegt es nahe, statt regelmäßige und auf geometrischen Prinzipien basierende Faltmuster umzusetzen, Faltmuster nach Maßgabe der Beanspruchungen bzw. der Beanspruchungsverteilung anzuwenden. Hierzu ist ein Formfindungsprozess zu entwickeln, der auf der Generierung eines Trajektoriennetzes basiert, das aus dem maßgeblichen Lastfall (formgebenden Lastfall) abgeleitet wird. Der Vergleich des Masseneinsatzes und der Traglast der Faltungen, die auf geometrischer Basis erzeugt wurden, mit einer auf Basis des Trajektoriennetzes entwickelten Faltung zeigt die Veränderung der Effizienz.},
year = {2019}
}
Structured Discrete Shape Approximation: Theoretical Complexity and Practical Algorithm
We consider the problem of approximating a two-dimensional shape contour (or curve segment) using discrete assembly systems, which allow to build geometric structures based on limited sets of node and edge types subject to edge length and orientation restrictions. We show that already deciding feasibility of such approximation problems is NP-hard, and remains intractable even for very simple setups. We then devise an algorithmic framework that combines shape sampling with exact cardinality-minimization to obtain good approximations using few components. As a particular application and showcase example, we discuss approximating shape contours using the classical Zometool construction kit and provide promising computational results, demonstrating that our algorithm is capable of obtaining good shape representations within reasonable time, in spite of the problem's general intractability. We conclude the paper with an outlook on possible extensions of the developed methodology, in particular regarding 3D shape approximation tasks.
Code available per request.
@article{TILLMANN2021101795,
title = {Structured discrete shape approximation: Theoretical complexity and practical algorithm},
journal = {Computational Geometry},
volume = {99},
pages = {101795},
year = {2021},
issn = {0925-7721},
doi = {https://doi.org/10.1016/j.comgeo.2021.101795},
url = {https://www.sciencedirect.com/science/article/pii/S0925772121000511},
author = {Andreas M. Tillmann and Leif Kobbelt},
keywords = {Shape approximation, Discrete assembly systems, Computational complexity, Mixed-integer programming, Zometool},
abstract = {We consider the problem of approximating a two-dimensional shape contour (or curve segment) using discrete assembly systems, which allow to build geometric structures based on limited sets of node and edge types subject to edge length and orientation restrictions. We show that already deciding feasibility of such approximation problems is NP-hard, and remains intractable even for very simple setups. We then devise an algorithmic framework that combines shape sampling with exact cardinality minimization to obtain good approximations using few components. As a particular application and showcase example, we discuss approximating shape contours using the classical Zometool construction kit and provide promising computational results, demonstrating that our algorithm is capable of obtaining good shape representations within reasonable time, in spite of the problem's general intractability. We conclude the paper with an outlook on possible extensions of the developed methodology, in particular regarding 3D shape approximation tasks.}
}
BoLTVOS: Box-Level Tracking for Video Object Segmentation
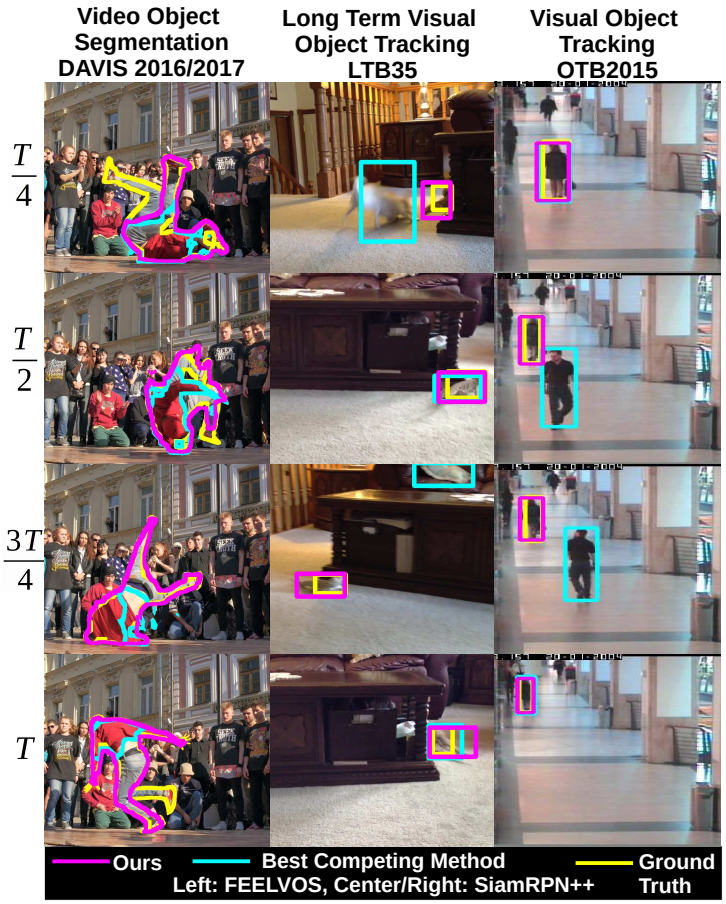
We approach video object segmentation (VOS) by splitting the task into two sub-tasks: bounding box level tracking, followed by bounding box segmentation. Following this paradigm, we present BoLTVOS (Box Level Tracking for VOS), which consists of an R-CNN detector conditioned on the first-frame bounding box to detect the object of interest, a temporal consistency rescoring algorithm, and a Box2Seg network that converts bounding boxes to segmentation masks. BoLTVOS performs VOS using only the first-frame bounding box without the mask. We evaluate our approach on DAVIS 2017 and YouTube-VOS, and show that it outperforms all methods that do not perform first-frame fine-tuning. We further present BoLTVOS-ft, which learns to segment the object in question using the first-frame mask while it is being tracked, without increasing the runtime. BoLTVOS-ft outperforms PReMVOS, the previously best performing VOS method on DAVIS 2016 and YouTube-VOS, while running up to 45 times faster. Our bounding box tracker also outperforms all previous short-term and longterm trackers on the bounding box level tracking datasets OTB 2015 and LTB35.
@article{VoigtlaenderLuiten19arxiv,
author = {Paul Voigtlaender and Jonathon Luiten and Bastian Leibe},
title = {{BoLTVOS: Box-Level Tracking for Video Object Segmentation}},
journal = {arXiv:1904.04552},
year = {2019}
}
3D-BEVIS: Birds-Eye-View Instance Segmentation
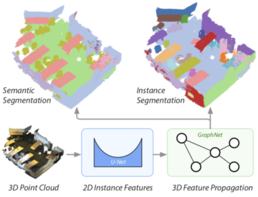
Recent deep learning models achieve impressive results on 3D scene analysis tasks by operating directly on unstructured point clouds. A lot of progress was made in the field of object classification and semantic segmentation. However, the task of instance segmentation is less explored. In this work, we present 3D-BEVIS, a deep learning framework for 3D semantic instance segmentation on point clouds. Following the idea of previous proposal-free instance segmentation approaches, our model learns a feature embedding and groups the obtained feature space into semantic instances. Current point-based methods scale linearly with the number of points by processing local sub-parts of a scene individually. However, to perform instance segmentation by clustering, globally consistent features are required. Therefore, we propose to combine local point geometry with global context information from an intermediate bird's-eye view representation.
@inproceedings{ElichGCPR19,
title = {{3D-BEVIS: Birds-Eye-View Instance Segmentation}},
author = {Elich, Cathrin and Engelmann, Francis and Schult, Jonas and Kontogianni, Theodora and Leibe, Bastian},
booktitle = {{German Conference on Pattern Recognition (GCPR)}},
year = {2019}
}
Computing the Spark: Mixed-Integer Programming for the (Vector) Matroid Girth Problem
We investigate the NP-hard problem of computing the spark of a matrix (i.e., the smallest number of linearly dependent columns), a key parameter in compressed sensing and sparse signal recovery. To that end, we identify polynomially solvable special cases, gather upper and lower bounding procedures, and propose several exact (mixed-)integer programming models and linear programming heuristics. In particular, we develop a branch-and-cut scheme to determine the girth of a matroid, focussing on the vector matroid case, for which the girth is precisely the spark of the representation matrix. Extensive numerical experiments demonstrate the effectiveness of our specialized algorithms compared to general-purpose black-box solvers applied to several mixed-integer programming models.
Code and test instances available per request; will become directly available on this page in the near future.
@article{Tillmann2019,
author = {Andreas M. Tillmann},
title = {{Computing the Spark: Mixed-Integer Programming\\for the (Vector) Matroid Girth Problem}},
journal = {{Computational Optimization and Applications}},
volume = {to appear},
year = {2019}
}
Singularity-Constrained Octahedral Fields for Hexahedral Meshing
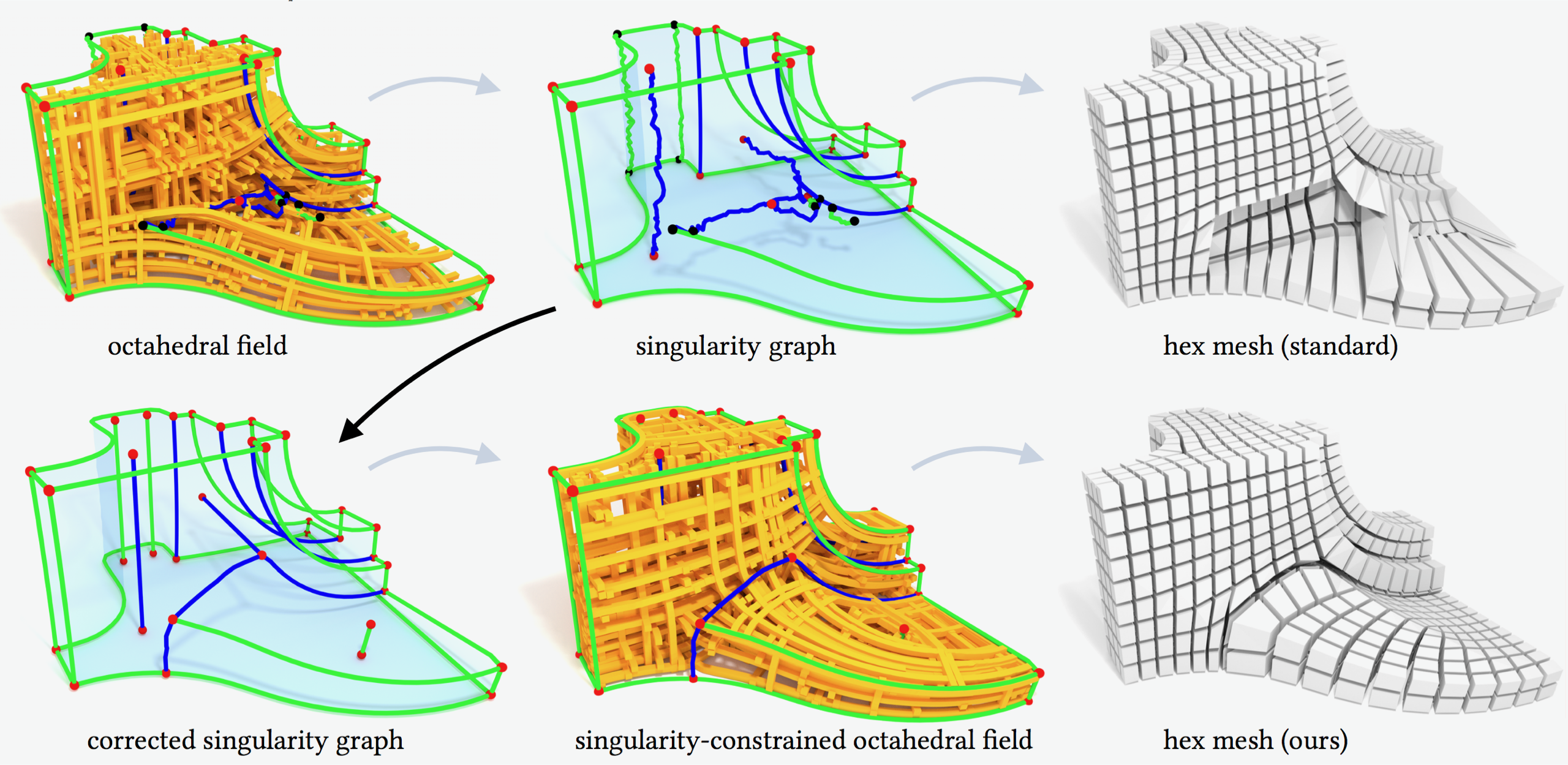
Despite high practical demand, algorithmic hexahedral meshing with guarantees on robustness and quality remains unsolved. A promising direction follows the idea of integer-grid maps, which pull back the Cartesian hexahedral grid formed by integer isoplanes from a parametric domain to a surface-conforming hexahedral mesh of the input object. Since directly optimizing for a high-quality integer-grid map is mathematically challenging, the construction is usually split into two steps: (1) generation of a surface-aligned octahedral field and (2) generation of an integer-grid map that best aligns to the octahedral field. The main robustness issue stems from the fact that smooth octahedral fields frequently exhibit singularity graphs that are not appropriate for hexahedral meshing and induce heavily degenerate integer-grid maps. The first contribution of this work is an enumeration of all local configurations that exist in hex meshes with bounded edge valence, and a generalization of the Hopf-Poincaré formula to octahedral fields, leading to necessary local and global conditions for the hex-meshability of an octahedral field in terms of its singularity graph. The second contribution is a novel algorithm to generate octahedral fields with prescribed hex-meshable singularity graphs, which requires the solution of a large non-linear mixed-integer algebraic system. This algorithm is an important step toward robust automatic hexahedral meshing since it enables the generation of a hex-meshable octahedral field.
PReMVOS: Proposal-generation, Refinement and Merging for Video Object Segmentation
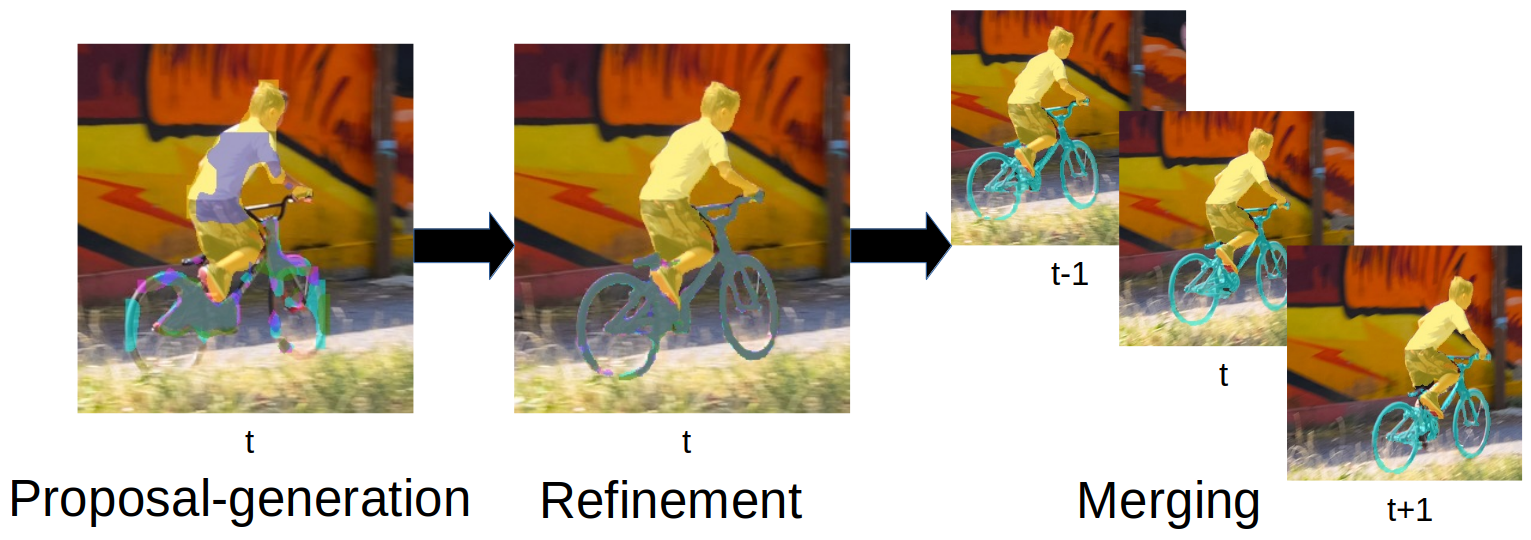
We address semi-supervised video object segmentation, the task of automatically generating accurate and consistent pixel masks for objects in a video sequence, given the first-frame ground truth annotations. Towards this goal, we present the PReMVOS algorithm (Proposalgeneration, Refinement and Merging for Video Object Segmentation). Our method separates this problem into two steps, first generating a set of accurate object segmentation mask proposals for each video frame and then selecting and merging these proposals into accurate and temporally consistent pixel-wise object tracks over a video sequence in a way which is designed to specifically tackle the difficult challenges involved with segmenting multiple objects across a video sequence. Our approach surpasses all previous state-of-the-art results on the DAVIS 2017 video object egmentation benchmark with a J & F mean score of 71.6 on the test-dev dataset, and achieves first place in both the DAVIS 2018 Video Object Segmentation Challenge and the YouTube-VOS 1st Large-scale Video Object Segmentation Challenge.
@inproceedings{luiten2018premvos,
title={PReMVOS: Proposal-generation, Refinement and Merging for Video Object Segmentation},
author={Jonathon Luiten and Paul Voigtlaender and Bastian Leibe},
booktitle={Asian Conference on Computer Vision},
year={2018}
}
Track, then Decide: Category-Agnostic Vision-based Multi-Object Tracking
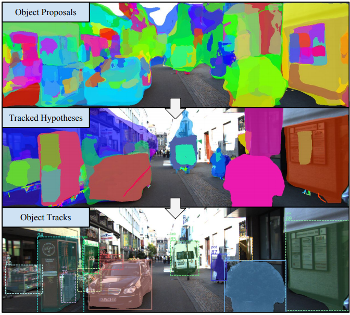
The most common paradigm for vision-based multi-object tracking is tracking-by-detection, due to the availability of reliable detectors for several important object categories such as cars and pedestrians. However, future mobile systems will need a capability to cope with rich human-made environments, in which obtaining detectors for every possible object category would be infeasible. In this paper, we propose a model-free multi-object tracking approach that uses a category-agnostic image segmentation method to track objects. We present an efficient segmentation mask-based tracker which associates pixel-precise masks reported by the segmentation. Our approach can utilize semantic information whenever it is available for classifying objects at the track level, while retaining the capability to track generic unknown objects in the absence of such information. We demonstrate experimentally that our approach achieves performance comparable to state-of-the-art tracking-by-detection methods for popular object categories such as cars and pedestrians. Additionally, we show that the proposed method can discover and robustly track a large variety of other objects.
@article{Osep18ICRA,
author = {O\v{s}ep, Aljo\v{s}a and Mehner, Wolfgang and Voigtlaender, Paul and Leibe, Bastian},
title = {Track, then Decide: Category-Agnostic Vision-based Multi-Object Tracking},
journal = {ICRA},
year = {2018}
}
Toward Rigorous Parameterization of Underconstrained Neural Network Models Through Interactive Visualization and Steering of Connectivity Generation

Simulation models in many scientific fields can have non-unique solutions or unique solutions which can be difficult to find. Moreover, in evolving systems, unique ?nal state solutions can be reached by multiple different trajectories. Neuroscience is no exception. Often, neural network models are subject to parameter fitting to obtain desirable output comparable to experimental data. Parameter fitting without sufficient constraints and a systematic exploration of the possible solution space can lead to conclusions valid only around local minima or around non-minima. To address this issue, we have developed an interactive tool for visualizing and steering parameters in neural network simulation models. In this work, we focus particularly on connectivity generation, since ?nding suitable connectivity configurations for neural network models constitutes a complex parameter search scenario. The development of the tool has been guided by several use cases—the tool allows researchers to steer the parameters of the connectivity generation during the simulation, thus quickly growing networks composed of multiple populations with a targeted mean activity. The flexibility of the software allows scientists to explore other connectivity and neuron variables apart from the ones presented as use cases. With this tool, we enable an interactive exploration of parameter spaces and a better understanding of neural network models and grapple with the crucial problem of non-unique network solutions and trajectories. In addition, we observe a reduction in turn around times for the assessment of these models, due to interactive visualization while the simulation is computed.
@ARTICLE{10.3389/fninf.2018.00032,
AUTHOR={Nowke, Christian and Diaz-Pier, Sandra and Weyers, Benjamin and Hentschel, Bernd and Morrison, Abigail and Kuhlen, Torsten W. and Peyser, Alexander},
TITLE={Toward Rigorous Parameterization of Underconstrained Neural Network Models Through Interactive Visualization and Steering of Connectivity Generation},
JOURNAL={Frontiers in Neuroinformatics},
VOLUME={12},
PAGES={32},
YEAR={2018},
URL={https://www.frontiersin.org/article/10.3389/fninf.2018.00032},
DOI={10.3389/fninf.2018.00032},
ISSN={1662-5196},
ABSTRACT={Simulation models in many scientific fields can have non-unique solutions or unique solutions which can be difficult to find.
Moreover, in evolving systems, unique final state solutions can be reached by multiple different trajectories.
Neuroscience is no exception. Often, neural network models are subject to parameter fitting to obtain desirable output comparable to experimental data. Parameter fitting without sufficient constraints and a systematic exploration of the possible solution space can lead to conclusions valid only around local minima or around non-minima. To address this issue, we have developed an interactive tool for visualizing and steering parameters in neural network simulation models.
In this work, we focus particularly on connectivity generation, since finding suitable connectivity configurations for neural network models constitutes a complex parameter search scenario. The development of the tool has been guided by several use cases -- the tool allows researchers to steer the parameters of the connectivity generation during the simulation, thus quickly growing networks composed of multiple populations with a targeted mean activity. The flexibility of the software allows scientists to explore other connectivity and neuron variables apart from the ones presented as use cases. With this tool, we enable an interactive exploration of parameter spaces and a better understanding of neural network models and grapple with the crucial problem of non-unique network solutions and trajectories. In addition, we observe a reduction in turn around times for the assessment of these models, due to interactive visualization while the simulation is computed.}
}
VIOLA : a Multi-Purpose and Web-Based Visualization Tool for Neuronal-Network Simulation Output
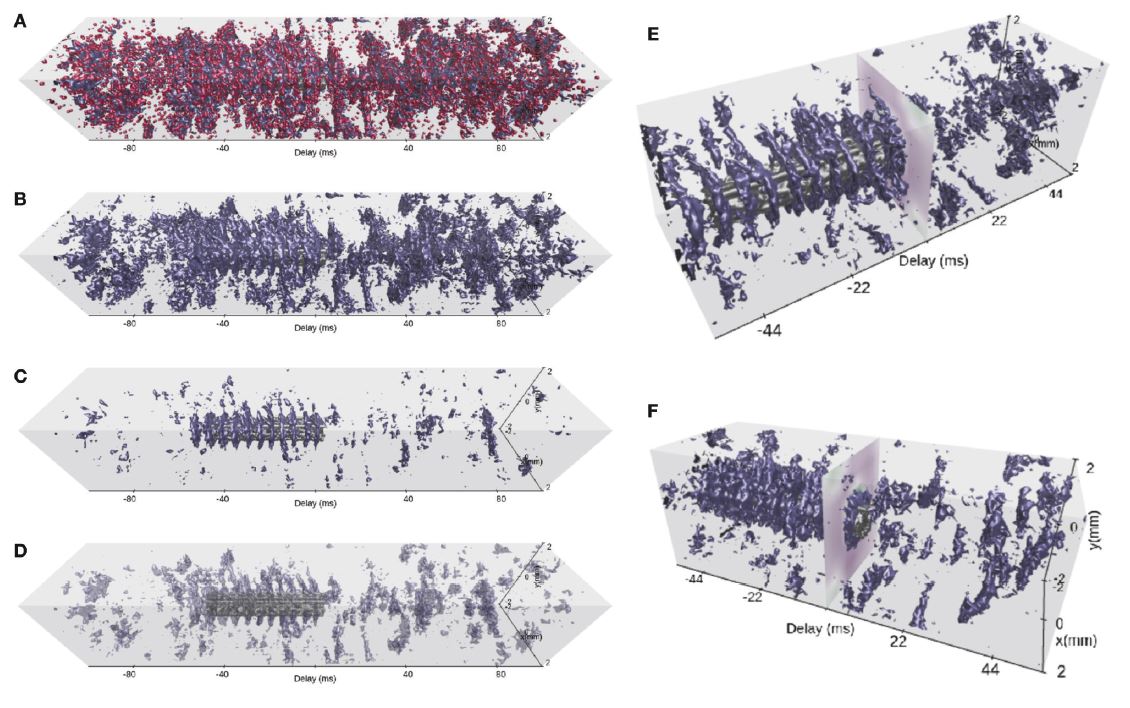
Neuronal network models and corresponding computer simulations are invaluable tools to aid the interpretation of the relationship between neuron properties, connectivity, and measured activity in cortical tissue. Spatiotemporal patterns of activity propagating across the cortical surface as observed experimentally can for example be described by neuronal network models with layered geometry and distance-dependent connectivity. In order to cover the surface area captured by today’s experimental techniques and to achieve sufficient self-consistency, such models contain millions of nerve cells. The interpretation of the resulting stream of multi-modal and multi-dimensional simulation data calls for integrating interactive visualization steps into existing simulation-analysis workflows. Here, we present a set of interactive visualization concepts called views for the visual analysis of activity data in topological network models, and a corresponding reference implementation VIOLA (VIsualization Of Layer Activity). The software is a lightweight, open-source, web-based, and platform-independent application combining and adapting modern interactive visualization paradigms, such as coordinated multiple views, for massively parallel neurophysiological data. For a use-case demonstration we consider spiking activity data of a two-population, layered point-neuron network model incorporating distance-dependent connectivity subject to a spatially confined excitation originating from an external population. With the multiple coordinated views, an explorative and qualitative assessment of the spatiotemporal features of neuronal activity can be performed upfront of a detailed quantitative data analysis of speci?c aspects of the data. Interactive multi-view analysis therefore assists existing data Analysis workflows. Furthermore,ongoingeffortsincludingtheEuropeanHumanBrainProjectaim at providing online user portals for integrated model development, simulation, analysis, and provenance tracking, wherein interactive visual analysis tools are one component. Browser-compatible, web-technology based solutions are therefore required. Within this scope, with VIOLA we provide a first prototype.
@ARTICLE{10.3389/fninf.2018.00075,
AUTHOR={Senk, Johanna and Carde, Corto and Hagen, Espen and Kuhlen, Torsten W. and Diesmann, Markus and Weyers, Benjamin},
TITLE={VIOLA—A Multi-Purpose and Web-Based Visualization Tool for Neuronal-Network Simulation Output},
JOURNAL={Frontiers in Neuroinformatics},
VOLUME={12},
PAGES={75},
YEAR={2018},
URL={https://www.frontiersin.org/article/10.3389/fninf.2018.00075},
DOI={10.3389/fninf.2018.00075},
ISSN={1662-5196},
ABSTRACT={Neuronal network models and corresponding computer simulations are invaluable tools to aid the interpretation of the relationship between neuron properties, connectivity and measured activity in cortical tissue. Spatiotemporal patterns of activity propagating across the cortical surface as observed experimentally can for example be described by neuronal network models with layered geometry and distance-dependent connectivity. In order to cover the surface area captured by today's experimental techniques and to achieve sufficient self-consistency, such models contain millions of nerve cells. The interpretation of the resulting stream of multi-modal and multi-dimensional simulation data calls for integrating interactive visualization steps into existing simulation-analysis workflows. Here, we present a set of interactive visualization concepts called views for the visual analysis of activity data in topological network models, and a corresponding reference implementation VIOLA (VIsualization Of Layer Activity). The software is a lightweight, open-source, web-based and platform-independent application combining and adapting modern interactive visualization paradigms, such as coordinated multiple views, for massively parallel neurophysiological data. For a use-case demonstration we consider spiking activity data of a two-population, layered point-neuron network model incorporating distance-dependent connectivity subject to a spatially confined excitation originating from an external population. With the multiple coordinated views, an explorative and qualitative assessment of the spatiotemporal features of neuronal activity can be performed upfront of a detailed quantitative data analysis of specific aspects of the data. Interactive multi-view analysis therefore assists existing data analysis workflows. Furthermore, ongoing efforts including the European Human Brain Project aim at providing online user portals for integrated model development, simulation, analysis and provenance tracking, wherein interactive visual analysis tools are one component. Browser-compatible, web-technology based solutions are therefore required. Within this scope, with VIOLA we provide a first prototype.}
}
Immersive Analytics Applications in Life and Health Sciences

Life and health sciences are key application areas for immersive analytics. This spans a broad range including medicine (e.g., investigations in tumour boards), pharmacology (e.g., research of adverse drug reactions), biology (e.g., immersive virtual cells) and ecology (e.g., analytics of animal behaviour). We present a brief overview of general applications of immersive analytics in the life and health sciences, and present a number of applications in detail, such as immersive analytics in structural biology, in medical image analytics, in neurosciences, in epidemiology, in biological network analysis and for virtual cells.
@Inbook{Czauderna2018,
author="Czauderna, Tobias
and Haga, Jason
and Kim, Jinman
and Klapperst{\"u}ck, Matthias
and Klein, Karsten
and Kuhlen, Torsten
and Oeltze-Jafra, Steffen
and Sommer, Bj{\"o}rn
and Schreiber, Falk",
editor="Marriott, Kim
and Schreiber, Falk
and Dwyer, Tim
and Klein, Karsten
and Riche, Nathalie Henry
and Itoh, Takayuki
and Stuerzlinger, Wolfgang
and Thomas, Bruce H.",
title="Immersive Analytics Applications in Life and Health Sciences",
bookTitle="Immersive Analytics",
year="2018",
publisher="Springer International Publishing",
address="Cham",
pages="289--330",
abstract="Life and health sciences are key application areas for immersive analytics. This spans a broad range including medicine (e.g., investigations in tumour boards), pharmacology (e.g., research of adverse drug reactions), biology (e.g., immersive virtual cells) and ecology (e.g., analytics of animal behaviour). We present a brief overview of general applications of immersive analytics in the life and health sciences, and present a number of applications in detail, such as immersive analytics in structural biology, in medical image analytics, in neurosciences, in epidemiology, in biological network analysis and for virtual cells.",
isbn="978-3-030-01388-2",
doi="10.1007/978-3-030-01388-2_10",
url="https://doi.org/10.1007/978-3-030-01388-2_10"
}
Exploring Immersive Analytics for Built Environments

This chapter overviews the application of immersive analytics to simulations of built environments through three distinct case studies. The first case study examines an immersive analytics approach based upon the concept of “Virtual Production Intelligence” for virtual prototyping tools throughout the planning phase of complete production sites. The second study addresses the 3D simulation of an extensive urban area and the attendant immersive analytic considerations in an interactive model of a sustainable city. The third study reviews how immersive analytic overlays have been applied for virtual heritage in the reconstruction and crowd simulation of the medieval Cambodian temple complex of Angkor Wat.
@Inbook{Chandler2018,
author="Chandler, Tom
and Morgan, Thomas
and Kuhlen, Torsten Wolfgang",
editor="Marriott, Kim
and Schreiber, Falk
and Dwyer, Tim
and Klein, Karsten
and Riche, Nathalie Henry
and Itoh, Takayuki
and Stuerzlinger, Wolfgang
and Thomas, Bruce H.",
title="Exploring Immersive Analytics for Built Environments",
bookTitle="Immersive Analytics",
year="2018",
publisher="Springer International Publishing",
address="Cham",
pages="331--357",
abstract="This chapter overviews the application of immersive analytics to simulations of built environments through three distinct case studies. The first case study examines an immersive analytics approach based upon the concept of ``Virtual Production Intelligence'' for virtual prototyping tools throughout the planning phase of complete production sites. The second study addresses the 3D simulation of an extensive urban area (191 km{\$}{\$}^2{\$}{\$}) and the attendant immersive analytic considerations in an interactive model of a sustainable city. The third study reviews how immersive analytic overlays have been applied for virtual heritage in the reconstruction and crowd simulation of the medieval Cambodian temple complex of Angkor Wat.",
isbn="978-3-030-01388-2",
doi="10.1007/978-3-030-01388-2_11",
url="https://doi.org/10.1007/978-3-030-01388-2_11"
}
Know What Your Neighbors Do: 3D Semantic Segmentation of Point Clouds
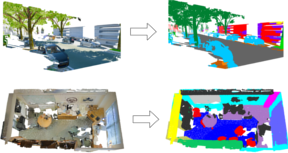
In this paper, we present a deep learning architecture which addresses the problem of 3D semantic segmentation of unstructured point clouds. Compared to previous work, we introduce grouping techniques which define point neighborhoods in the initial world space and the learned feature space. Neighborhoods are important as they allow to compute local or global point features depending on the spatial extend of the neighborhood. Additionally, we incorporate dedicated loss functions to further structure the learned point feature space: the pairwise distance loss and the centroid loss. We show how to apply these mechanisms to the task of 3D semantic segmentation of point clouds and report state-of-the-art performance on indoor and outdoor datasets.
@inproceedings{3dsemseg_ECCVW18,
author = {Francis Engelmann and
Theodora Kontogianni and
Jonas Schult and
Bastian Leibe},
title = {Know What Your Neighbors Do: 3D Semantic Segmentation of Point Clouds},
booktitle = {{IEEE} European Conference on Computer Vision, GMDL Workshop, {ECCV}},
year = {2018}
}
Fast Corotated FEM using Operator Splitting
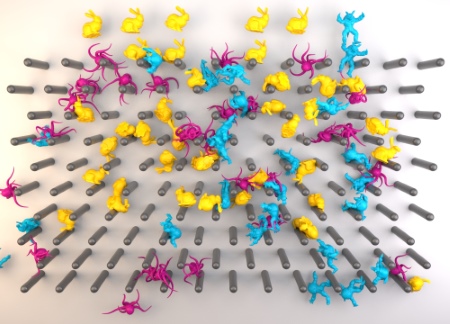
In this paper we present a novel operator splitting approach for corotated FEM simulations. The deformation energy of the corotated linear material model consists of two additive terms. The first term models stretching in the individual spatial directions and the second term describes resistance to volume changes. By formulating the backward Euler time integration scheme as an optimization problem, we show that the first term is invariant to rotations. This allows us to use an operator splitting approach and to solve both terms individually with different numerical methods. The stretching part is solved accurately with an optimization integrator, which can be done very efficiently because the system matrix is constant over time such that its Cholesky factorization can be precomputed. The volume term is solved approximately by using the compliant constraints method and Gauss-Seidel iterations. Further, we introduce the analytic polar decomposition which allows us to speed up the extraction of the rotational part of the deformation gradient and to recover inverted elements. Finally, this results in an extremely fast and robust simulation method with high visual quality that outperforms standard corotated FEMs by more than two orders of magnitude and even the fast but inaccurate PBD and shape matching methods by more than one order of magnitude without having their typical drawbacks. This enables a very efficient simulation of complex scenes containing more than a million elements.
@article{KKB2018,
author = {Tassilo Kugelstadt and Dan Koschier and Jan Bender},
title = {Fast Corotated FEM using Operator Splitting},
year = {2018},
journal = {Computer Graphics Forum (SCA)},
volume = {37},
number = {8}
}
Feature Curve Co-Completion in Noisy Data
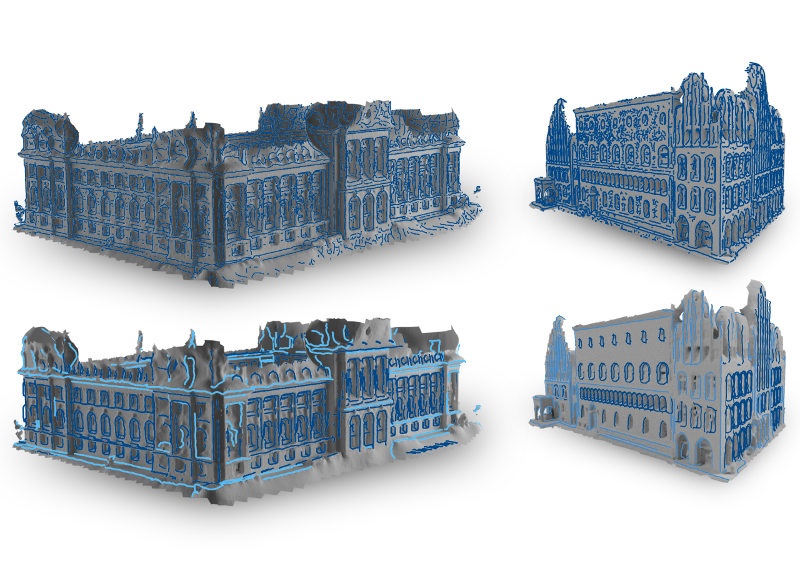
Feature curves on 3D shapes provide important hints about significant parts of the geometry and reveal their underlying structure. However, when we process real world data, automatically detected feature curves are affected by measurement uncertainty, missing data, and sampling resolution, leading to noisy, fragmented, and incomplete feature curve networks. These artifacts make further processing unreliable. In this paper we analyze the global co-occurrence information in noisy feature curve networks to fill in missing data and suppress weakly supported feature curves. For this we propose an unsupervised approach to find meaningful structure within the incomplete data by detecting multiple occurrences of feature curve configurations (co-occurrence analysis). We cluster and merge these into feature curve templates, which we leverage to identify strongly supported feature curve segments as well as to complete missing data in the feature curve network. In the presence of significant noise, previous approaches had to resort to user input, while our method performs fully automatic feature curve co-completion. Finding feature reoccurrences however, is challenging since naive feature curve comparison fails in this setting due to fragmentation and partial overlaps of curve segments. To tackle this problem we propose a robust method for partial curve matching. This provides us with the means to apply symmetry detection methods to identify co-occurring configurations. Finally, Bayesian model selection enables us to detect and group re-occurrences that describe the data well and with low redundancy.
@inproceedings{gehre2018feature,
title={Feature Curve Co-Completion in Noisy Data},
author={Gehre, Anne and Lim, Isaak and Kobbelt, Leif},
booktitle={Computer Graphics Forum},
volume={37},
number={2},
year={2018},
organization={Wiley Online Library}
}
A Physically Consistent Implicit Viscosity Solver for SPH Fluids
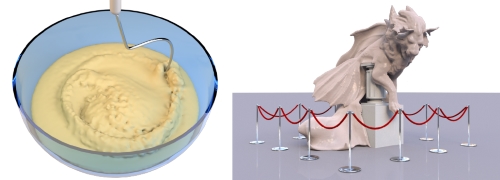
In this paper, we present a novel physically consistent implicit solver for the simulation of highly viscous fluids using the Smoothed Particle Hydrodynamics (SPH) formalism. Our method is the result of a theoretical and practical in-depth analysis of the most recent implicit SPH solvers for viscous materials. Based on our findings, we developed a list of requirements that are vital to produce a realistic motion of a viscous fluid. These essential requirements include momentum conservation, a physically meaningful behavior under temporal and spatial refinement, the absence of ghost forces induced by spurious viscosities and the ability to reproduce complex physical effects that can be observed in nature. On the basis of several theoretical analyses, quantitative academic comparisons and complex visual experiments we show that none of the recent approaches is able to satisfy all requirements. In contrast, our proposed method meets all demands and therefore produces realistic animations in highly complex scenarios. We demonstrate that our solver outperforms former approaches in terms of physical accuracy and memory consumption while it is comparable in terms of computational performance. In addition to the implicit viscosity solver, we present a method to simulate melting objects. Therefore, we generalize the viscosity model to a spatially varying viscosity field and provide an SPH discretization of the heat equation.
@article{WKBB2018,
author = {Marcel Weiler and Dan Koschier and Magnus Brand and Jan Bender},
title = {A Physically Consistent Implicit Viscosity Solver for SPH Fluids},
year = {2018},
journal = {Computer Graphics Forum (Eurographics)},
volume = {37},
number = {2}
}
Direct Position-Based Solver for Stiff Rods
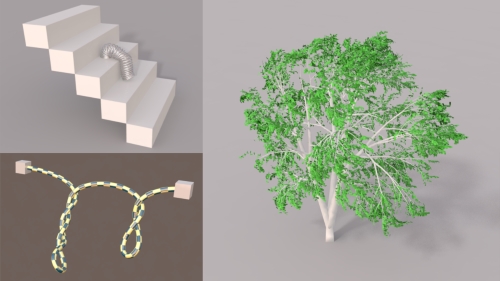
In this paper, we present a novel direct solver for the efficient simulation of stiff, inextensible elastic rods within the Position-Based Dynamics (PBD) framework. It is based on the XPBD algorithm, which extends PBD to simulate elastic objects with physically meaningful material parameters. XPBD approximates an implicit Euler integration and solves the system of non-linear equations using a non-linear Gauss-Seidel solver. However, this solver requires many iterations to converge for complex models and if convergence is not reached, the material becomes too soft. In contrast we use Newton iterations in combination with our direct solver to solve the non-linear equations which significantly improves convergence by solving all constraints of an acyclic structure (tree), simultaneously. Our solver only requires a few Newton iterations to achieve high stiffness and inextensibility. We model inextensible rods and trees using rigid segments connected by constraints. Bending and twisting constraints are derived from the well-established Cosserat model. The high performance of our solver is demonstrated in highly realistic simulations of rods consisting of multiple ten-thousand segments. In summary, our method allows the efficient simulation of stiff rods in the Position-Based Dynamics framework with a speedup of two orders of magnitude compared to the original XPBD approach.
@article{DKWB2018,
author = {Crispin Deul and Tassilo Kugelstadt and Marcel Weiler and Jan Bender},
title = {Direct Position-Based Solver for Stiff Rods},
year = {2018},
journal = {Computer Graphics Forum},
volume = {37},
number = {6},
pages = {313-324},
keywords = {physically based animation, animation, Computing methodologies → Physical simulation},
doi = {10.1111/cgf.13326},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1111/cgf.13326},
eprint = {https://onlinelibrary.wiley.com/doi/pdf/10.1111/cgf.13326},
}
MaskLab: Instance Segmentation by Refining Object Detection with Semantic and Direction Features

In this work, we tackle the problem of instance segmentation, the task of simultaneously solving object detection and semantic segmentation. Towards this goal, we present a model, called MaskLab, which produces three outputs: box detection, semantic segmentation, and direction prediction. Building on top of the Faster-RCNN object detector, the predicted boxes provide accurate localization of object instances. Within each region of interest, MaskLab performs foreground/background segmentation by combining semantic and direction prediction. Semantic segmentation assists the model in distinguishing between objects of different semantic classes including background, while the direction prediction, estimating each pixel's direction towards its corresponding center, allows separating instances of the same semantic class. Moreover, we explore the effect of incorporating recent successful methods from both segmentation and detection (i.e. atrous convolution and hypercolumn). Our proposed model is evaluated on the COCO instance segmentation benchmark and shows comparable performance with other state-of-art models.
@article{Chen18CVPR,
title = {{MaskLab: Instance Segmentation by Refining Object Detection with Semantic and Direction Features}},
author = {Chen, Liang-Chieh and Hermans, Alexander and Papandreou, George and Schroff, Florian and Wang, Peng and Adam, Hartwig},
journal = {{IEEE Conference on Computer Vision and Pattern Recognition (CVPR'18)}},,
year = {2018}
}
Selective Padding for Polycube-based Hexahedral Meshing
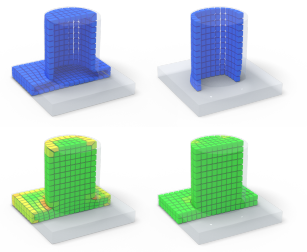
Abstract Hexahedral meshes generated from polycube mapping often exhibit a low number of singularities but also poor-quality elements located near the surface. It is thus necessary to improve the overall mesh quality, in terms of the minimum scaled Jacobian (MSJ) or average SJ (ASJ). Improving the quality may be obtained via global padding (or pillowing), which pushes the singularities inside by adding an extra layer of hexahedra on the entire domain boundary. Such a global padding operation suffers from a large increase of complexity, with unnecessary hexahedra added. In addition, the quality of elements near the boundary may decrease. We propose a novel optimization method which inserts sheets of hexahedra so as to perform selective padding, where it is most needed for improving the mesh quality. A sheet can pad part of the domain boundary, traverse the domain and form singularities. Our global formulation, based on solving a binary problem, enables us to control the balance between quality improvement, increase of complexity and number of singularities. We show in a series of experiments that our approach increases the MSJ value and preserves (or even improves) the ASJ, while adding fewer hexahedra than global padding.
@article{Cherchi2018SelectivePadding,
author = {Cherchi, G. and Alliez, P. and Scateni, R. and Lyon, M. and Bommes, D.},
title = {Selective Padding for Polycube-Based Hexahedral Meshing},
journal = {Computer Graphics Forum},
volume = {38},
number = {1},
pages = {580-591},
keywords = {computational geometry, modelling, physically based modelling, mesh generation, I.3.5 Computer Graphics: Computational Geometry and Object Modeling—Curve, surface, solid, and object representations},
doi = {https://doi.org/10.1111/cgf.13593},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1111/cgf.13593},
eprint = {https://onlinelibrary.wiley.com/doi/pdf/10.1111/cgf.13593},
abstract = {Abstract Hexahedral meshes generated from polycube mapping often exhibit a low number of singularities but also poor-quality elements located near the surface. It is thus necessary to improve the overall mesh quality, in terms of the minimum scaled Jacobian (MSJ) or average SJ (ASJ). Improving the quality may be obtained via global padding (or pillowing), which pushes the singularities inside by adding an extra layer of hexahedra on the entire domain boundary. Such a global padding operation suffers from a large increase of complexity, with unnecessary hexahedra added. In addition, the quality of elements near the boundary may decrease. We propose a novel optimization method which inserts sheets of hexahedra so as to perform selective padding, where it is most needed for improving the mesh quality. A sheet can pad part of the domain boundary, traverse the domain and form singularities. Our global formulation, based on solving a binary problem, enables us to control the balance between quality improvement, increase of complexity and number of singularities. We show in a series of experiments that our approach increases the MSJ value and preserves (or even improves) the ASJ, while adding fewer hexahedra than global padding.},
year = {2019}
}
Virtual Humans as Co-Workers: A Novel Methodology to Study Peer Effects

We introduce a novel methodology to study peer effects. Using virtual reality technology, we create a naturalistic work setting in an immersive virtual environment where we embed a computer-generated virtual human as the co-worker of a human subject, both performing a sorting task at a conveyor belt. In our setup, subjects observe the virtual peer, while the virtual human is not observing them. In two treatments, human subjects observe either a low productive or a high productive virtual peer. We find that human subjects rate their presence feeling of \being there" in the immersive virtual environment as natural. Subjects also recognize that virtual peers in our two treatments showed different productivities. We do not find a general treatment effect on productivity. However, we find that competitive subjects display higher performance when they are in the presence of a highly productive peer - compared to when they observe a low productive peer. We use tracking data to learn about the subjects' body movements. Analyzing hand and head data, we show that competitive subjects are more careful in the sorting task than non-competitive subjects. We also discuss some methodological issues related to virtual reality experiments.
@article{gurerk2018,
title={{Virtual Humans as Co-Workers: A Novel Methodology to Study Peer Effects}},
author={G{\"u}rerk, Ozg{\"u}r and B{\"o}nsch, Andrea and Kittsteiner, Thomas and Staffeldt, Andreas},
year={2018},
journal = {{Journal of Behavioral and Experimental Economics}},
issn = {2214-8043},
doi = {https://doi.org/10.1016/j.socec.2018.11.003},
url = {http://www.sciencedirect.com/science/article/pii/S221480431830140X}
}
PReMVOS: Proposal-generation, Refinement and Merging for the DAVIS Challenge on Video Object Segmentation 2018
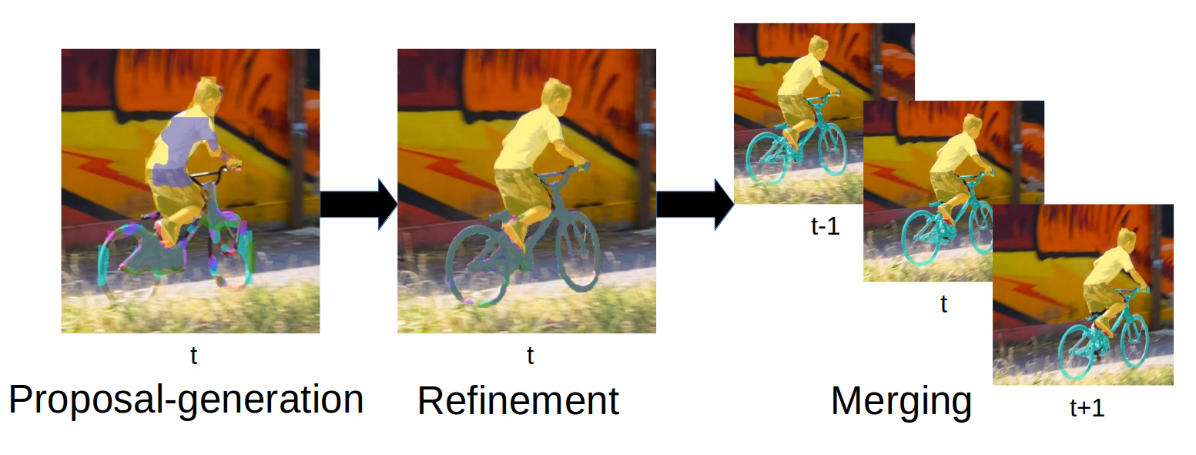
We address semi-supervised video object segmentation, the task of automatically generating accurate and consistent pixel masks for objects in a video sequence, given the first-frame ground truth annotations. Towards this goal, we present the PReMVOS algorithm (Proposal-generation, Refinement and Merging for Video Object Segmentation). This method involves generating coarse object proposals using a Mask R-CNN like object detector, followed by a refinement network that produces accurate pixel masks for each proposal. We then select and link these proposals over time using a merging algorithm that takes into account an objectness score, the optical flow warping, and a Re-ID feature embedding vector for each proposal. We adapt our networks to the target video domain by fine-tuning on a large set of augmented images generated from the first-frame ground truth. Our approach surpasses all previous state-of-the-art results on the DAVIS 2017 video object segmentation benchmark and achieves first place in the DAVIS 2018 Video Object Segmentation Challenge with a mean of J & F score of 74.7.
@article{Luiten18CVPRW,
author = {Jonathon Luiten and Paul Voigtlaender and Bastian Leibe},
title = {{PReMVOS: Proposal-generation, Refinement and Merging for the DAVIS Challenge on Video Object Segmentation 2018}},
journal = {The 2018 DAVIS Challenge on Video Object Segmentation - CVPR Workshops},
year = {2018}
}
How Robust is 3D Human Pose Estimation to Occlusion?
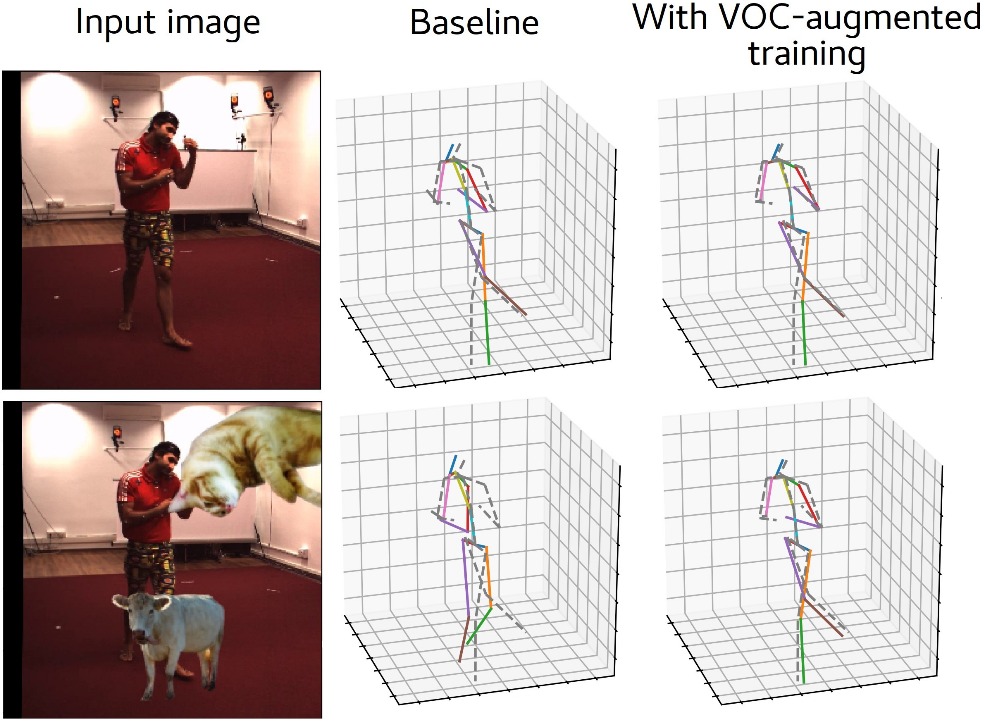
Occlusion is commonplace in realistic human-robot shared environments, yet its effects are not considered in standard 3D human pose estimation benchmarks. This leaves the question open: how robust are state-of-the-art 3D pose estimation methods against partial occlusions? We study several types of synthetic occlusions over the Human3.6M dataset and find a method with state-of-the-art benchmark performance to be sensitive even to low amounts of occlusion. Addressing this issue is key to progress in applications such as collaborative and service robotics. We take a first step in this direction by improving occlusion-robustness through training data augmentation with synthetic occlusions. This also turns out to be an effective regularizer that is beneficial even for non-occluded test cases.
@inproceedings{Sarandi18IROSW,
title={How Robust is {3D} Human Pose Estimation to Occlusion?},
author={S\'ar\'andi, Istv\'an and Linder, Timm and Arras, Kai O. and Leibe, Bastian},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems Workshops (IROSW)},
year={2018}
}
Interactive Curve Constrained Functional Maps
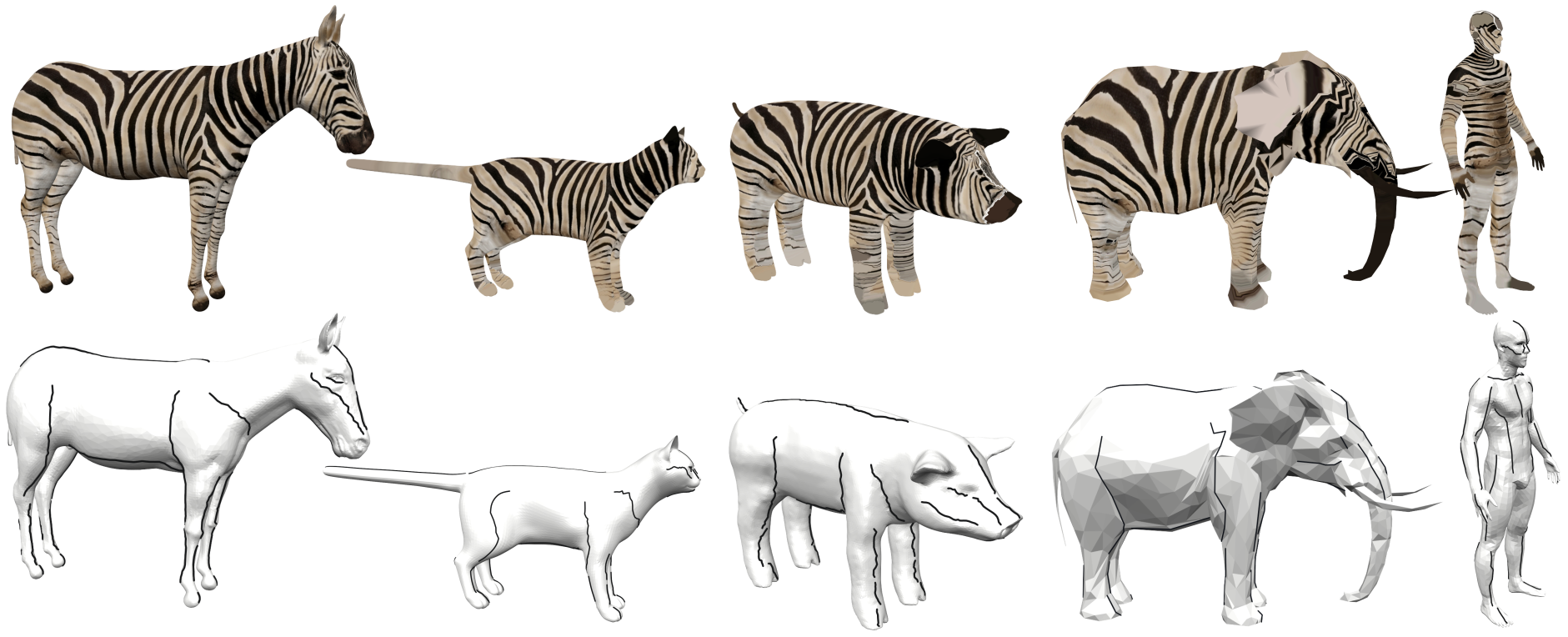
Functional maps have gained popularity as a versatile framework for representing intrinsic correspondence between 3D shapes using algebraic machinery. A key ingredient for this framework is the ability to find pairs of corresponding functions (typically, feature descriptors) across the shapes. This is a challenging problem on its own, and when the shapes are strongly non-isometric, nearly impossible to solve automatically. In this paper, we use feature curve correspondences to provide flexible abstractions of semantically similar parts of non-isometric shapes. We design a user interface implementing an interactive process for constructing shape correspondence, allowing the user to update the functional map at interactive rates by introducing feature curve correspondences. We add feature curve preservation constraints to the functional map framework and propose an efficient numerical method to optimize the map with immediate feedback. Experimental results show that our approach establishes correspondences between geometrically diverse shapes with just a few clicks.
@article{Gehre:2018:InteractiveFunctionalMaps,
author = "Gehre, Anne and Bronstein, Michael and Kobbelt, Leif and Solomon, Justin",
title = "Interactive Curve Constrained Functional Maps",
journal = "Computer Graphics Forum",
volume = 37,
number = 5,
year = 2018
}
Interactive Visual Analysis of Multi-dimensional Metamodels
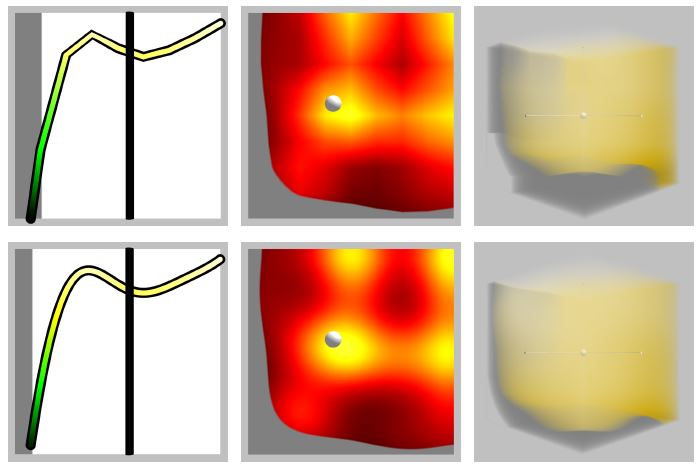
In the simulation of manufacturing processes, complex models are used to examine process properties. To save computation time, so-called metamodels serve as surrogates for the original models. Metamodels are inherently difficult to interpret, because they resemble multi-dimensional functions f : Rn -> Rm that map configuration parameters to production criteria. We propose a multi-view visualization application called memoSlice that composes several visualization techniques, specially adapted to the analysis of metamodels. With our application, we enable users to improve their understanding of a metamodel, but also to easily optimize processes. We put special attention on providing a high level of interactivity by realizing specialized parallelization techniques to provide timely feedback on user interactions. In this paper we outline these parallelization techniques and demonstrate their effectivity by means of micro and high level measurements.
@inproceedings {pgv.20181098,
booktitle = {Eurographics Symposium on Parallel Graphics and Visualization},
editor = {Hank Childs and Fernando Cucchietti},
title = {{Interactive Visual Analysis of Multi-dimensional Metamodels}},
author = {Gebhardt, Sascha and Pick, Sebastian and Hentschel, Bernd and Kuhlen, Torsten Wolfgang},
year = {2018},
publisher = {The Eurographics Association},
ISSN = {1727-348X},
ISBN = {978-3-03868-054-3},
DOI = {10.2312/pgv.20181098}
}
Social VR: How Personal Space is Affected by Virtual Agents’ Emotions
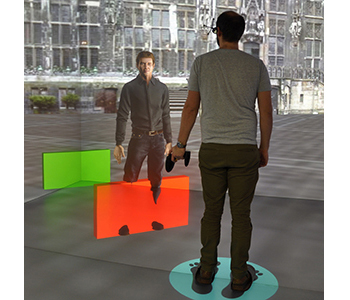
Personal space (PS), the flexible protective zone maintained around oneself, is a key element of everyday social interactions. It, e.g., affects people's interpersonal distance and is thus largely involved when navigating through social environments. However, the PS is regulated dynamically, its size depends on numerous social and personal characteristics and its violation evokes different levels of discomfort and physiological arousal. Thus, gaining more insight into this phenomenon is important.
We contribute to the PS investigations by presenting the results of a controlled experiment in a CAVE, focusing on German males in the age of 18 to 30 years. The PS preferences of 27 participants have been sampled while they were approached by either a single embodied, computer-controlled virtual agent (VA) or by a group of three VAs. In order to investigate the influence of a VA's emotions, we altered their facial expression between angry and happy. Our results indicate that the emotion as well as the number of VAs approaching influence the PS: larger distances are chosen to angry VAs compared to happy ones; single VAs are allowed closer compared to the group. Thus, our study is a foundation for social and behavioral studies investigating PS preferences.
@InProceedings{Boensch2018c,
author = {Andrea B\"{o}nsch and Sina Radke and Heiko Overath and Laura M. Asch\'{e} and Jonathan Wendt and Tom Vierjahn and Ute Habel and Torsten W. Kuhlen},
title = {{Social VR: How Personal Space is Affected by Virtual Agents’ Emotions}},
booktitle = {Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces (VR) 2018},
year = {2018}
}
You Spin my Head Right Round: Threshold of Limited Immersion for Rotation Gains in Redirected Walking
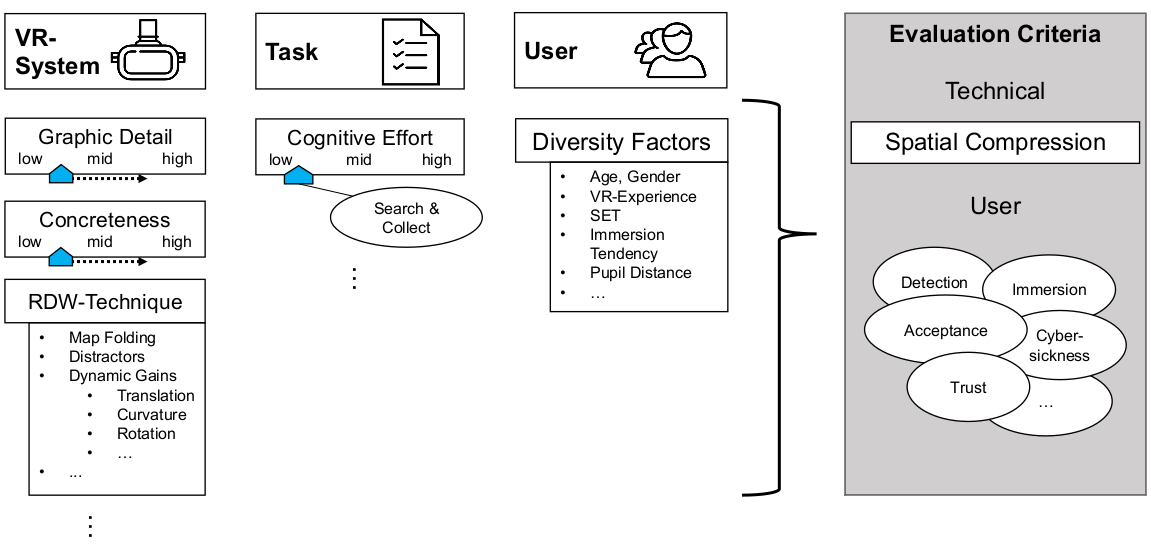
In virtual environments, the space that can be explored by real walking is limited by the size of the tracked area. To enable unimpeded walking through large virtual spaces in small real-world surroundings, redirection techniques are used. These unnoticeably manipulate the user’s virtual walking trajectory. It is important to know how strongly such techniques can be applied without the user noticing the manipulation—or getting cybersick. Previously, this was estimated by measuring a detection threshold (DT) in highly-controlled psychophysical studies, which experimentally isolate the effect but do not aim for perceived immersion in the context of VR applications. While these studies suggest that only relatively low degrees of manipulation are tolerable, we claim that, besides establishing detection thresholds, it is important to know when the user’s immersion breaks. We hypothesize that the degree of unnoticed manipulation is significantly different from the detection threshold when the user is immersed in a task. We conducted three studies: a) to devise an experimental paradigm to measure the threshold of limited immersion (TLI), b) to measure the TLI for slowly decreasing and increasing rotation gains, and c) to establish a baseline of cybersickness for our experimental setup. For rotation gains greater than 1.0, we found that immersion breaks quite late after the gain is detectable. However, for gains lesser than 1.0, some users reported a break of immersion even before established detection thresholds were reached. Apparently, the developed metric measures an additional quality of user experience. This article contributes to the development of effective spatial compression methods by utilizing the break of immersion as a benchmark for redirection techniques.
Streaming Live Neuronal Simulation Data into Visualization and Analysis

Neuroscientists want to inspect the data their simulations are producing while these are still running. This will on the one hand save them time waiting for results and therefore insight. On the other, it will allow for more efficient use of CPU time if the simulations are being run on supercomputers. If they had access to the data being generated, neuroscientists could monitor it and take counter-actions, e.g., parameter adjustments, should the simulation deviate too much from in-vivo observations or get stuck.
As a first step toward this goal, we devise an in situ pipeline tailored to the neuroscientific use case. It is capable of recording and transferring simulation data to an analysis/visualization process, while the simulation is still running. The developed libraries are made publicly available as open source projects. We provide a proof-of-concept integration, coupling the neuronal simulator NEST to basic 2D and 3D visualization.
@InProceedings{10.1007/978-3-030-02465-9_18,
author="Oehrl, Simon
and M{\"u}ller, Jan
and Schnathmeier, Jan
and Eppler, Jochen Martin
and Peyser, Alexander
and Plesser, Hans Ekkehard
and Weyers, Benjamin
and Hentschel, Bernd
and Kuhlen, Torsten W.
and Vierjahn, Tom",
editor="Yokota, Rio
and Weiland, Mich{\`e}le
and Shalf, John
and Alam, Sadaf",
title="Streaming Live Neuronal Simulation Data into Visualization and Analysis",
booktitle="High Performance Computing",
year="2018",
publisher="Springer International Publishing",
address="Cham",
pages="258--272",
abstract="Neuroscientists want to inspect the data their simulations are producing while these are still running. This will on the one hand save them time waiting for results and therefore insight. On the other, it will allow for more efficient use of CPU time if the simulations are being run on supercomputers. If they had access to the data being generated, neuroscientists could monitor it and take counter-actions, e.g., parameter adjustments, should the simulation deviate too much from in-vivo observations or get stuck.",
isbn="978-3-030-02465-9"
}
Interactive Exploration Assistance for Immersive Virtual Environments Based on Object Visibility and Viewpoint Quality
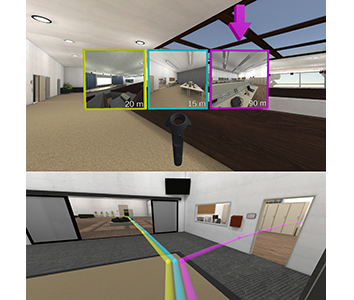
During free exploration of an unknown virtual scene, users often miss important parts, leading to incorrect or incomplete environment knowledge and a potential negative impact on performance in later tasks. This is addressed by wayfinding aids such as compasses, maps, or trails, and automated exploration schemes such as guided tours. However, these approaches either do not actually ensure exploration success or take away control from the user.
Therefore, we present an interactive assistance interface to support exploration that guides users to interesting and unvisited parts of the scene upon request, supplementing their own, free exploration. It is based on an automated analysis of object visibility and viewpoint quality and is therefore applicable to a wide range of scenes without human supervision or manual input. In a user study, we found that the approach improves users' knowledge of the environment, leads to a more complete exploration of the scene, and is also subjectively helpful and easy to use.
Does the Directivity of a Virtual Agent’s Speech Influence the Perceived Social Presence?

When interacting and communicating with virtual agents in immersive environments, the agents’ behavior should be believable and authentic. Thereby, one important aspect is a convincing auralizations of their speech. In this work-in progress paper a study design to evaluate the effect of adding directivity to speech sound source on the perceived social presence of a virtual agent is presented. Therefore, we describe the study design and discuss first results of a prestudy as well as consequential improvements of the design.
@InProceedings{Boensch2018b,
author = {Jonathan Wendt and Benjamin Weyers and Andrea B\"{o}nsch and Jonas Stienen and Tom Vierjahn and Michael Vorländer and Torsten W. Kuhlen },
title = {{Does the Directivity of a Virtual Agent’s Speech Influence the Perceived Social Presence?}},
booktitle = {IEEE Virtual Humans and Crowds for Immersive Environments (VHCIE)},
year = {2018}
}
Dynamic Field of View Reduction Related to Subjective Sickness Measures in an HMD-based Data Analysis Task
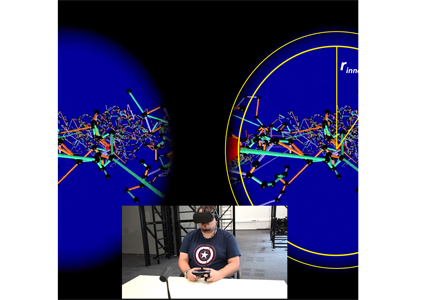
Various factors influence the degree of cybersickness a user can suffer in an immersive virtual environment, some of which can be controlled without adapting the virtual environment itself. When using HMDs, one example is the size of the field of view. However, the degree to which factors like this can be manipulated without affecting the user negatively in other ways is limited. Another prominent characteristic of cybersickness is that it affects individuals very differently. Therefore, to account for both the possible disruptive nature of alleviating factors and the high interpersonal variance, a promising approach may be to intervene only in cases where users experience discomfort symptoms, and only as much as necessary. Thus, we conducted a first experiment, where the field of view was decreased when people feel uncomfortable, to evaluate the possible positive impact on sickness and negative influence on presence. While we found no significant evidence for any of these possible effects, interesting further results and observations were made.
@InProceedings{zielasko2018,
title={{Dynamic Field of View Reduction Related to Subjective Sickness Measures in an HMD-based Data Analysis Task}},
author={Zielasko, Daniel and Mei{\ss}ner, Alexander and Freitag Sebastian and Weyers, Benjamin and Kuhlen, Torsten W},
booktitle ={Proc. of IEEE Virtual Reality Workshop on Everyday Virtual Reality},
year={2018}
}
Towards Understanding the Influence of a Virtual Agent’s Emotional Expression on Personal Space
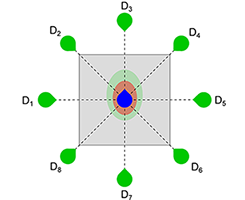
The concept of personal space is a key element of social interactions. As such, it is a recurring subject of investigations in the context of research on proxemics. Using virtual-reality-based experiments, we contribute to this area by evaluating the direct effects of emotional expressions of an approaching virtual agent on an individual’s behavioral and physiological responses. As a pilot study focusing on the emotion expressed solely by facial expressions gave promising results, we now present a study design to gain more insight.
@InProceedings{Boensch2018b,
author = {Andrea B\"{o}nsch and Sina Radke and Jonathan Wendt and Tom Vierjahn and Ute Habel and Torsten W. Kuhlen},
title = {{Towards Understanding the Influence of a Virtual Agent’s Emotional Expression on Personal Space}},
booktitle = {IEEE Virtual Humans and Crowds for Immersive Environments (VHCIE)},
year = {2018}
}
Fluid Sketching — Immersive Sketching Based on Fluid Flow

Fluid artwork refers to works of art based on the aesthetics of fluid motion, such as smoke photography, ink injection into water, and paper marbling. Inspired by such types of art, we created Fluid Sketching as a novel medium for creating 3D fluid artwork in immersive virtual environments. It allows artists to draw 3D fluid-like sketches and manipulate them via six degrees of freedom input devices. Different sets of brush strokes are available, varying different characteristics of the fluid. Because of fluid's nature, the diffusion of the drawn fluid sketch is animated, and artists have control over altering the fluid properties and stopping the diffusion process whenever they are satisfied with the current result. Furthermore, they can shape the drawn sketch by directly interacting with it, either with their hand or by blowing into the fluid. We rely on particle advection via curl-noise as a fast procedural method for animating the fluid flow.
@InProceedings{Eroglu2018,
author = {Eroglu, Sevinc and Gebhardt, Sascha and Schmitz, Patric and Rausch, Dominik and Kuhlen, Torsten Wolfgang},
title = {{Fluid Sketching — Immersive Sketching Based on Fluid Flow}},
booktitle = {Proceedings of IEEE Virtual Reality Conference 2018},
year = {2018}
}
Seamless Hand-Based Remote and Close Range Interaction in IVEs
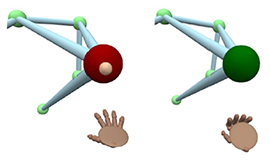
In this work, we describe a hybrid, hand-based interaction metaphor that makes remote and close objects in an HMD-based immersive virtual environment (IVE) seamlessly accessible. To accomplish this, different existing techniques, such as go-go and HOMER, were combined in a way that aims for generality, intuitiveness, uniformity, and speed. A technique like this is one prerequisite for a successful integration of IVEs to professional everyday applications, such as data analysis workflows.
A Simple Approach to Intrinsic Correspondence Learning on Unstructured 3D Meshes
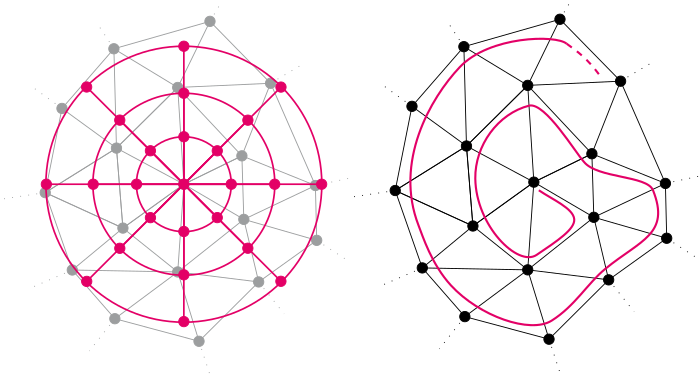
The question of representation of 3D geometry is of vital importance when it comes to leveraging the recent advances in the field of machine learning for geometry processing tasks. For common unstructured surface meshes state-of-the-art methods rely on patch-based or mapping-based techniques that introduce resampling operations in order to encode neighborhood information in a structured and regular manner. We investigate whether such resampling can be avoided, and propose a simple and direct encoding approach. It does not only increase processing efficiency due to its simplicity - its direct nature also avoids any loss in data fidelity. To evaluate the proposed method, we perform a number of experiments in the challenging domain of intrinsic, non-rigid shape correspondence estimation. In comparisons to current methods we observe that our approach is able to achieve highly competitive results.
@InProceedings{lim2018_correspondence_learning,
author = {Lim, Isaak and Dielen, Alexander and Campen, Marcel and Kobbelt, Leif},
title = {A Simple Approach to Intrinsic Correspondence Learning on Unstructured 3D Meshes},
booktitle = {The European Conference on Computer Vision (ECCV) Workshops},
month = {September},
year = {2018}
}
Poster: Complexity Estimation for Feature Tracking Data.
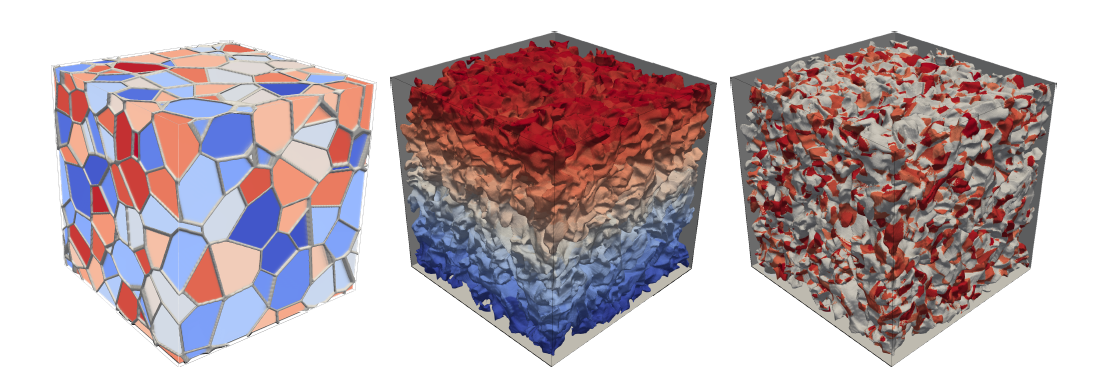
Feature tracking is a method of time-varying data analysis. Due to the complexity of the underlying problem, different feature tracking algorithms have different levels of correctness in certain use cases. However, there is no efficient way to evaluate their performance on simulation data since there is no ground-truth easily obtainable. Synthetic data is a way to ensure a minimum level of correctness, though there are limits to their expressiveness when comparing the results to simulation data. To close this gap, we calculate a synthetic data set and use its results to extract a hypothesis about the algorithm performance that we can apply to simulation data.
@inproceedings{Helmrich2018,
title={Complexity Estimation for Feature Tracking Data.},
author={Helmrich, Dirk N and Schnorr, Andrea and Kuhlen, Torsten W and Hentschel, Bernd},
booktitle={LDAV},
pages={100--101},
year={2018}
}
PReMVOS: Proposal-generation, Refinement and Merging for the YouTube-VOS Challenge on Video Object Segmentation 2018
We evaluate our PReMVOS algorithm [1]2 on the new YouTube-VOS dataset [3] for the task of semi-supervised video object segmentation (VOS). This task consists of automatically generating accurate and consistent pixel masks for multiple objects in a video sequence, given the object’s first-frame ground truth annotations. The new YouTube-VOS dataset and the corresponding challenge, the 1st Large-scale Video Object Segmentation Challenge, provide a much larger scale evaluation than any previous VOS benchmarks. Our method achieves the best results in the 2018 Large-scale Video Object Segmentation Challenge with a J &F overall mean score over both known and unknown categories of 72.2.
@article{Luiten18ECCVW,
author = {Jonathon Luiten and Paul Voigtlaender and Bastian Leibe},
title = {{PReMVOS: Proposal-generation, Refinement and Merging for the YouTube-VOS Challenge on Video Object Segmentation 2018}},
journal = {The 1st Large-scale Video Object Segmentation Challenge - ECCV Workshops},
year = {2018}
}
Synthetic Occlusion Augmentation with Volumetric Heatmaps for the 2018 ECCV PoseTrack Challenge on 3D Human Pose Estimation
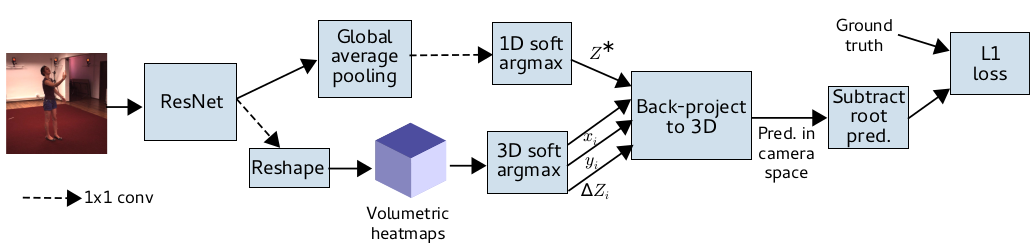
In this paper we present our winning entry at the 2018 ECCV PoseTrack Challenge on 3D human pose estimation. Using a fully-convolutional backbone architecture, we obtain volumetric heatmaps per body joint, which we convert to coordinates using soft-argmax. Absolute person center depth is estimated by a 1D heatmap prediction head. The coordinates are back-projected to 3D camera space, where we minimize the L1 loss. Key to our good results is the training data augmentation with randomly placed occluders from the Pascal VOC dataset. In addition to reaching first place in the Challenge, our method also surpasses the state-of-the-art on the full Human3.6M benchmark when considering methods that use no extra pose datasets in training. Code for applying synthetic occlusions is availabe at https://github.com/isarandi/synthetic-occlusion.
@article{Sarandi18synthocc,
author = {S\'ar\'andi, Istv\'an and Linder, Timm and Arras, Kai O. and Leibe, Bastian},
title = {Synthetic Occlusion Augmentation with Volumetric Heatmaps for the 2018 {ECCV PoseTrack Challenge} on {3D} Human Pose Estimation},
journal={arXiv preprint arXiv:1809.04987},
year = {2018}
}
Deep Person Detection in 2D Range Data
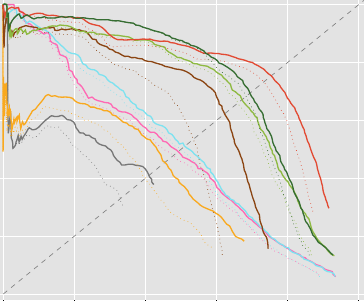
TL;DR: Extend the DROW dataset to persons, extend the method to include short temporal context, and extensively benchmark all available methods.
Detecting humans is a key skill for mobile robots and intelligent vehicles in a large variety of applications. While the problem is well studied for certain sensory modalities such as image data, few works exist that address this detection task using 2D range data. However, a widespread sensory setup for many mobile robots in service and domestic applications contains a horizontally mounted 2D laser scanner. Detecting people from 2D range data is challenging due to the speed and dynamics of human leg motion and the high levels of occlusion and self-occlusion particularly in crowds of people. While previous approaches mostly relied on handcrafted features, we recently developed the deep learning based wheelchair and walker detector DROW. In this paper, we show the generalization to people, including small modifications that significantly boost DROW's performance. Additionally, by providing a small, fully online temporal window in our network, we further boost our score. We extend the DROW dataset with person annotations, making this the largest dataset of person annotations in 2D range data, recorded during several days in a real-world environment with high diversity. Extensive experiments with three current baseline methods indicate it is a challenging dataset, on which our improved DROW detector beats the current state-of-the-art.
@article{Beyer2018RAL,
title = {{Deep Person Detection in 2D Range Data}},
author = {Beyer, Lucas and Hermans, Alexander and Linder, Timm and Arras, Kai Oliver and Leibe, Bastian},
journal = {IEEE Robotics and Automation Letters},
volume = {3},
number = {3},
pages = {2726--2733}
year = {2018}
}
Get Well Soon! Human Factors’ Influence on Cybersickness after Redirected Walking Exposure in Virtual Reality
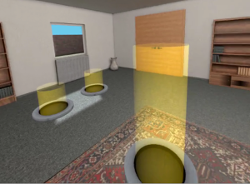
Cybersickness poses a crucial threat to applications in the domain of Virtual Reality. Yet, its predictors are insufficiently explored when redirection techniques are applied. Those techniques let users explore large virtual spaces by natural walking in a smaller tracked space. This is achieved by unnoticeably manipulating the user’s virtual walking trajectory. Unfortunately, this also makes the application more prone to cause Cybersickness. We conducted a user study with a semi-structured interview to get quantitative and qualitative insights into this domain. Results show that Cybersickness arises, but also eases ten minutes after the exposure. Quantitative results indicate that a tolerance towards Cybersickness might be related to self-efficacy constructs and therefore learnable or trainable, while qualitative results indicate that users’ endurance of Cybersickness is dependent on symptom factors such as intensity and duration, as well as factors of usage context and motivation. The role of Cybersickness in Virtual Reality environments is discussed in terms of the applicability of redirected walking techniques.
Talk: Streaming Live Neuronal Simulation Data into Visualization and Analysis
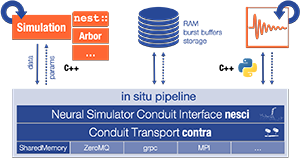
Being able to inspect neuronal network simulations while they are running provides new research strategies to neuroscientists as it enables them to perform actions like parameter adjustments in case the simulation performs unexpectedly. This can also save compute resources when such simulations are run on large supercomputers as errors can be detected and corrected earlier saving valuable compute time. This talk presents a prototypical pipeline that enables in-situ analysis and visualization of running simulations.
Towards Large-Scale Video Video Object Mining
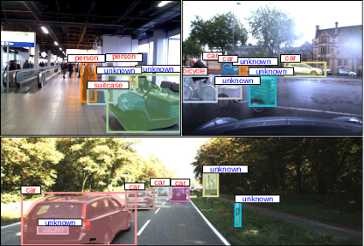
We propose to leverage a generic object tracker in order to perform object mining in large-scale unlabeled videos, captured in a realistic automotive setting. We present a dataset of more than 360'000 automatically mined object tracks from 10+ hours of video data (560'000 frames) and propose a method for automated novel category discovery and detector learning. In addition, we show preliminary results on using the mined tracks for object detector adaptation.
@article{OsepVoigtlaender18ECCVW,
title={Towards Large-Scale Video Object Mining},
author={Aljo\v{s}a O\v{s}ep and Paul Voigtlaender and Jonathon Luiten and Stefan Breuers and Bastian Leibe},
journal={ECCV 2018 Workshop on Interactive and Adaptive Learning in an Open World},
year={2018}
}
Fluid Sketching: Bringing Ebru Art into VR

In this interactive demo, we present our Fluid Sketching application as an innovative virtual reality-based interpretation of traditional marbling art. By using a particle-based simulation combined with natural, spatial, and multi-modal interaction techniques, we create and extend the original artistic work to build a comprehensive interactive experience. With the interactive demo of Fluid Sketching during Mensch und Computer 2018, we aim at increasing the awareness of paper marbling as traditional type of art and demonstrating the potential of virtual reality as new and innovative digital and artistic medium.
@article{eroglu2018fluid,
title={Fluid Sketching: Bringing Ebru Art into VR},
author={Eroglu, Sevinc and Weyers, Benjamin and Kuhlen, Torsten},
journal={Mensch und Computer 2018-Workshopband},
year={2018},
publisher={Gesellschaft f{\"u}r Informatik eV}
}
Talk: Influence of Emotions on Personal Space Preferences
Personal Space (PS) is regulated dynamically by choosing an appropriate interpersonal distance when navigating through social environments. This key element in social interactions is influenced by numerous social and personal characteristics, e.g., the nature of the relationship between the interaction partners and the other’s sex and age. Moreover, affective contexts and expressions of interaction partners influence PS preferences, evident, e.g., in larger distances to others in threatening situations or when confronted with angry-looking individuals. Given the prominent role of emotional expressions in our everyday social interactions, we investigate how emotions affect PS adaptions.
Real Walking in Virtual Spaces: Visiting the Aachen Cathedral
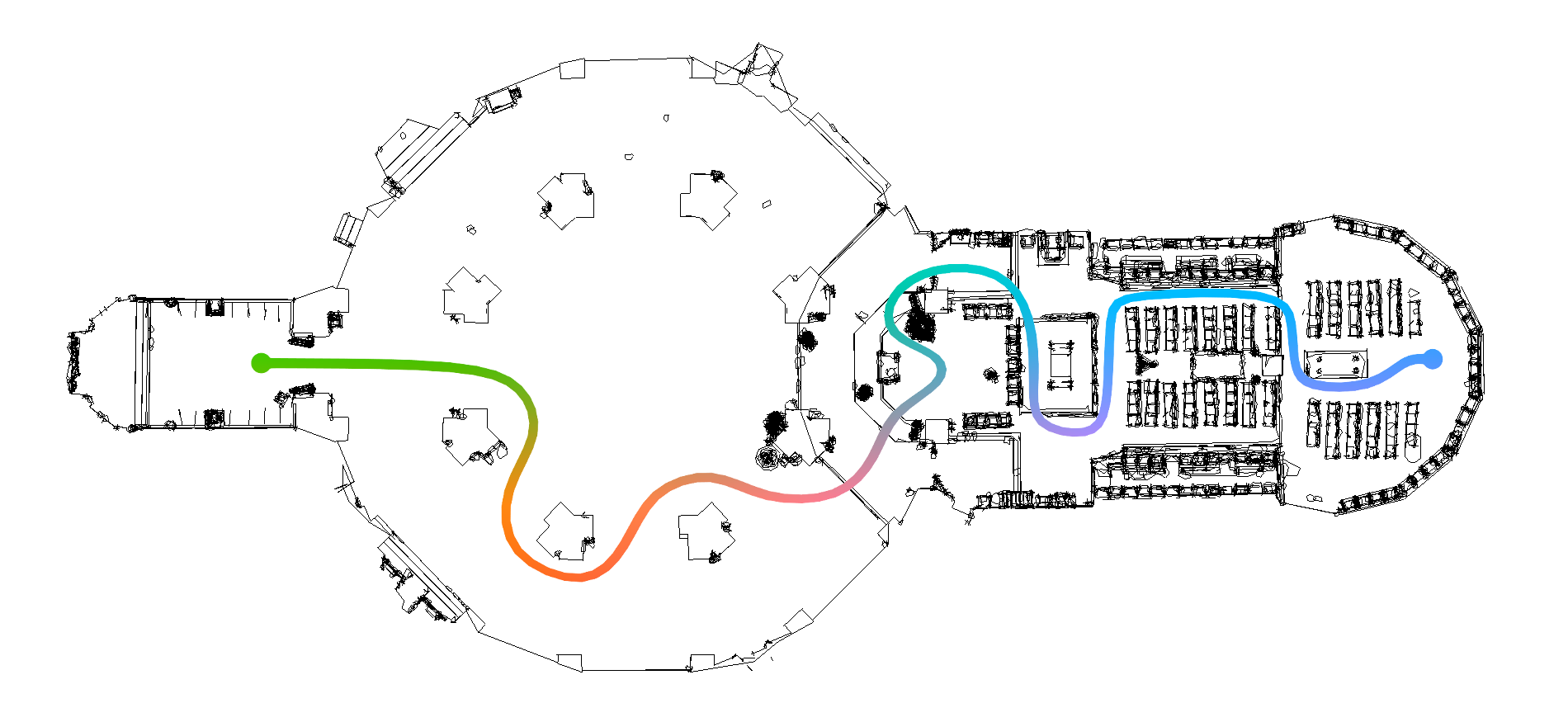
Real walking is the most natural and intuitive way to navigate the world around us. In Virtual Reality, the limited tracking area of commercially available systems typically does not match the size of the virtual environment we wish to explore. Spatial compression methods enable the user to walk further in the virtual environment than the real tracking bounds permit. This demo gives a glimpse into our ongoing research on spatial compression in VR. Visitors can walk through a realistic model of the Aachen Cathedral within a room-sized tracking area.
@article{schmitz2018real,
title={Real Walking in Virtual Spaces: Visiting the Aachen Cathedral},
author={Schmitz, Patric and Kobbelt, Leif},
journal={Mensch und Computer 2018-Workshopband},
year={2018},
publisher={Gesellschaft f{\"u}r Informatik eV}
}
Near-Constant Density Wireframe Meshes for 3D Printing
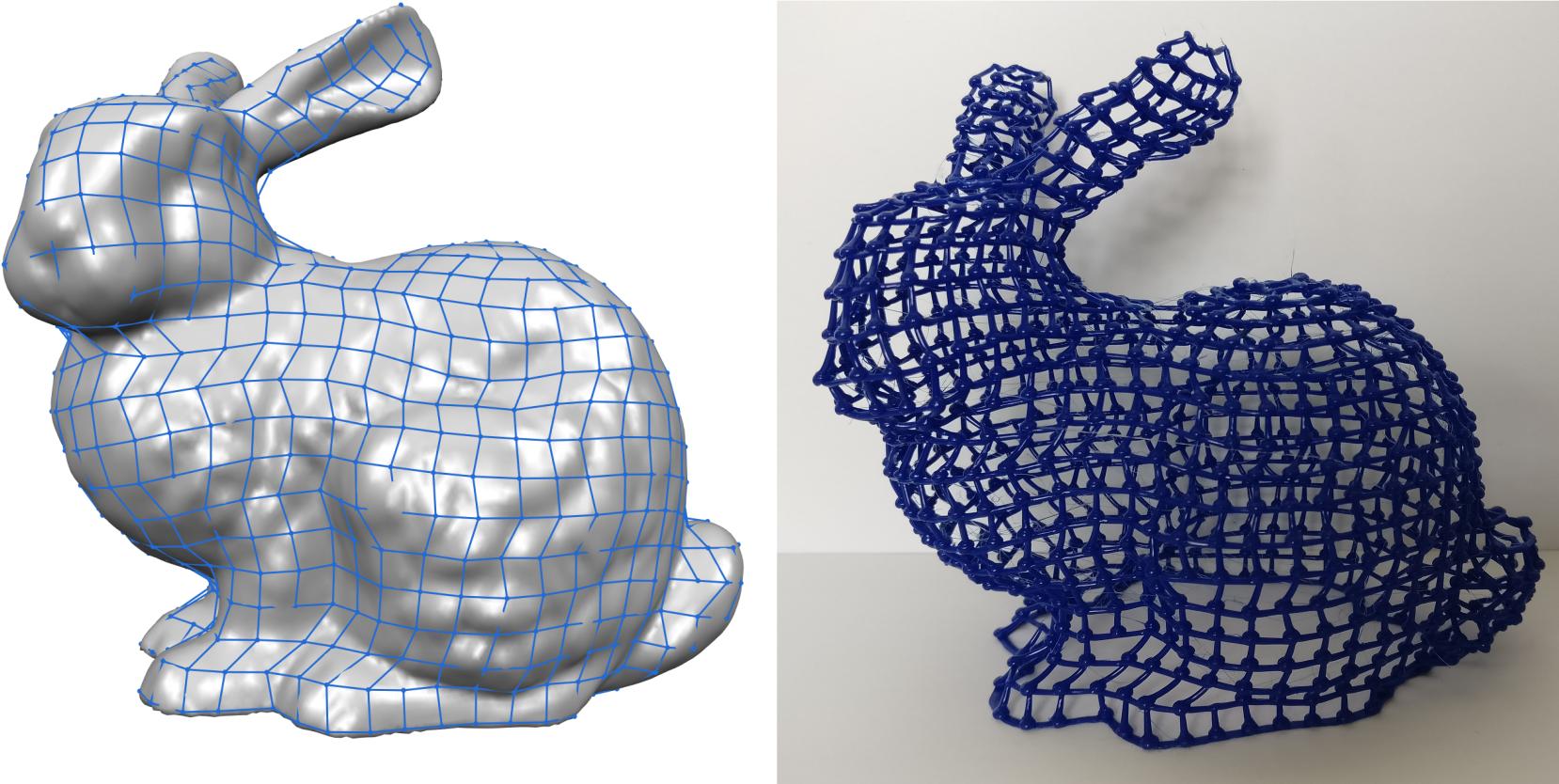
In fused deposition modeling (FDM) an object is usually constructed layer-by-layer. Using FDM 3D printers it is however also possible to extrude filament directly in 3D space. Using this technique, a wireframe version of an object can be created by directly printing the wireframe edges into 3D space. This way the print time can be reduced and significant material saving can be achieved. This paper presents a technique for wireframe mesh generation with application in 3D printing. The proposed technique transforms triangle meshes into polygonal meshes, from which the edges can be printed to create the wiremesh. Furthermore, the method is able to generate near-constant density of lines, even in regions parallel to the build platform.
Direct Shot Correspondence Matching
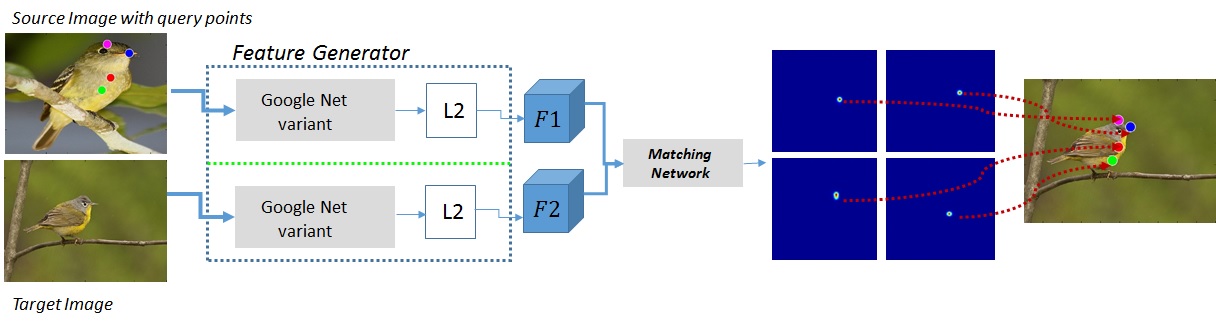
We propose a direct shot method for the task of correspondence matching. Instead of minimizing a loss based on positive and negative pairs, which requires hard-negative mining step for training and nearest neighbor search step for inference, we propose a novel similarity heatmap generator that makes these additional steps obsolete. The similarity heatmap generator efficiently generates peaked similarity heatmaps over the target image for all the query keypoints in a single pass. The matching network can be appended to any standard deep network architecture to make it end-to-end trainable with N-pairs based metric learning and achieves superior performance. We evaluate the proposed method on various correspondence matching datasets and achieve state-of-the-art performance.
Iteratively Trained Interactive Segmentation
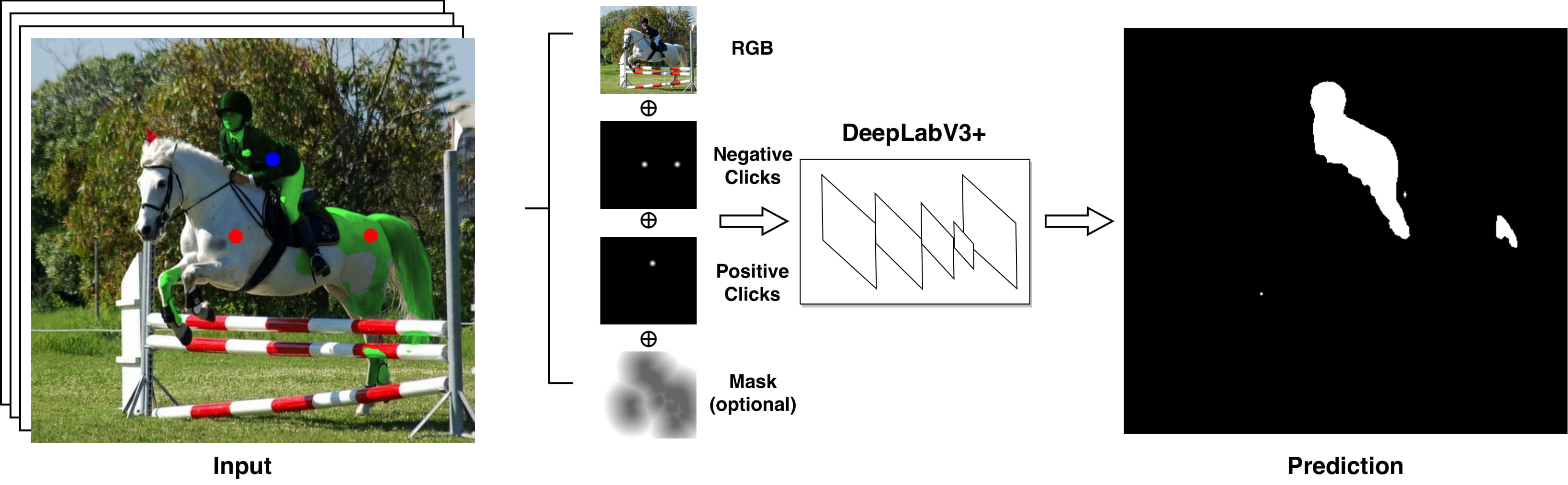
Deep learning requires large amounts of training data to be effective. For the task of object segmentation, manually labeling data is very expensive, and hence interactive methods are needed. Following recent approaches, we develop an interactive object segmentation system which uses user input in the form of clicks as the input to a convolutional network. While previous methods use heuristic click sampling strategies to emulate user clicks during training, we propose a new iterative training strategy. During training, we iteratively add clicks based on the errors of the currently predicted segmentation. We show that our iterative training strategy together with additional improvements to the network architecture results in improved results over the state-of-the-art.
Detection-Tracking for Efficient Person Analysis: The DetTA Pipeline
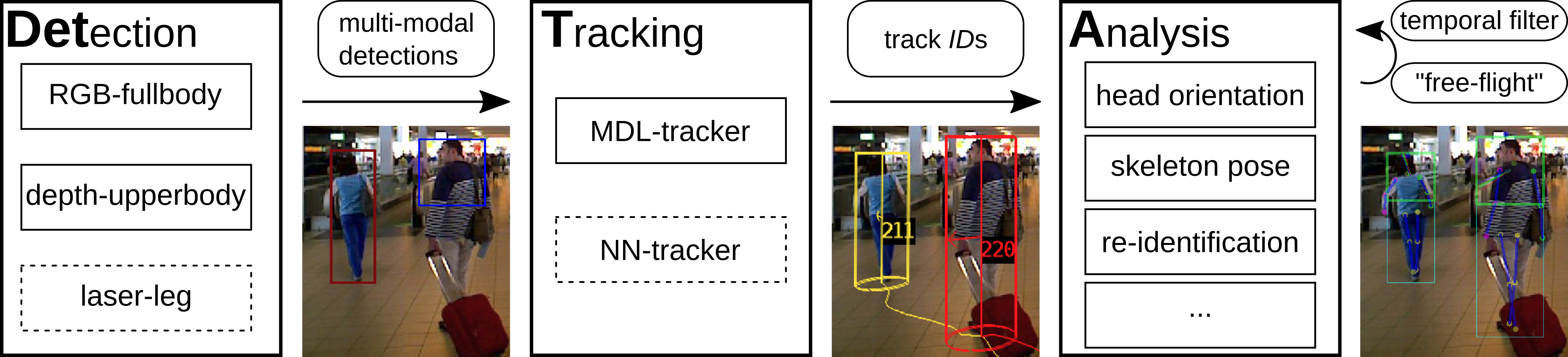
TL;DR: Detection+Tracking+{head orientation,skeleton} analysis. Smooth per-track enables filtering outliers as well as a "free flight" mode where expensive analysis modules are run with a stride, dramatically increasing runtime performance at almost no loss of prediction quality.
In the past decade many robots were deployed in the wild, and people detection and tracking is an important component of such deployments. On top of that, one often needs to run modules which analyze persons and extract higher level attributes such as age and gender, or dynamic information like gaze and pose. The latter ones are especially necessary for building a reactive, social robot-person interaction.
In this paper, we combine those components in a fully modular detection-tracking-analysis pipeline, called DetTA. We investigate the benefits of such an integration on the example of head and skeleton pose, by using the consistent track ID for a temporal filtering of the analysis modules’ observations, showing a slight improvement in a challenging real-world scenario. We also study the potential of a so-called “free-flight” mode, where the analysis of a person attribute only relies on the filter’s predictions for certain frames. Here, our study shows that this boosts the runtime dramatically, while the prediction quality remains stable. This insight is especially important for reducing power consumption and sharing precious (GPU-)memory when running many analysis components on a mobile platform, especially so in the era of expensive deep learning methods.
@article{BreuersBeyer2018Arxiv,
title = {{Detection-Tracking for Efficient Person Analysis: The DetTA Pipeline}},
author = {Breuers*, Stefan and Beyer*, Lucas and Rafi, Umer and Leibe, Bastian},
journal = {arXiv preprint arXiv:TBD},
year = {2018}
}
Joint Antenna Selection and Phase-Only Beam Using Mixed-Integer Nonlinear Programming
In this paper, we consider the problem of joint antenna selection and analog beamformer design in a downlink single-group multicast network. Our objective is to reduce the hardware requirement by minimizing the number of required phase shifters at the transmitter while fulfilling given quality of constraints. We formulate the problem as an L0 minimization problem and devise a novel branch-and-cut based algorithm to solve the formulated mixed-integer nonlinear program optimally. We also propose a suboptimal heuristic algorithm to solve the above problem with a low computational complexity. Furthermore, the performance of the suboptimal method is evaluated against the developed optimal method, which serves as a benchmark.
@inproceedings{FischerHedgeMatterPesaventoPfetschTillmann2018,
author = {T. Fischer and G. Hedge and F. Matter and M. Pesavento and M. E. Pfetsch and A. M. Tillmann},
title = {{Joint Antenna Selection and Phase-Only Beam Using Mixed-Integer Nonlinear Programming}},
booktitle = {{Proc. WSA 2018}},
pages = {},
year = {2018},
note = {to appear}
}
Large-Scale Object Discovery and Detector Adaptation from Unlabeled Video
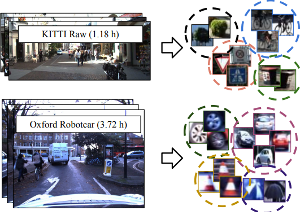
We explore object discovery and detector adaptation based on unlabeled video sequences captured from a mobile platform. We propose a fully automatic approach for object mining from video which builds upon a generic object tracking approach. By applying this method to three large video datasets from autonomous driving and mobile robotics scenarios, we demonstrate its robustness and generality. Based on the object mining results, we propose a novel approach for unsupervised object discovery by appearance-based clustering. We show that this approach successfully discovers interesting objects relevant to driving scenarios. In addition, we perform self-supervised detector adaptation in order to improve detection performance on the KITTI dataset for existing categories. Our approach has direct relevance for enabling large-scale object learning for autonomous driving.
@article{OsepVoigtlaender18arxiv,
title={Large-Scale Object Discovery and Detector Adaptation from Unlabeled Video},
author={Aljo\v{s}a O\v{s}ep and Paul Voigtlaender and Jonathon Luiten and Stefan Breuers and Bastian Leibe},
journal={arXiv preprint arXiv:1712.08832},
year={2018}
}
Directional Field Synthesis, Design, and Processing
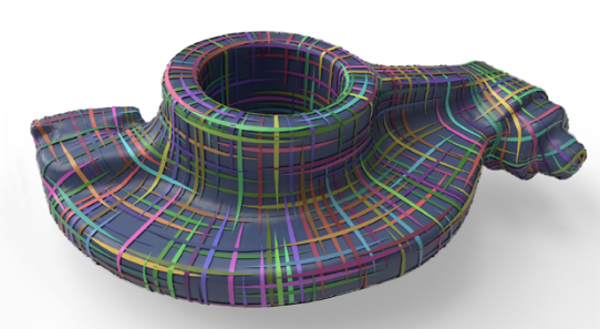
Direction fields and vector fields play an increasingly important role in computer graphics and geometry processing. The synthesis of directional fields on surfaces, or other spatial domains, is a fundamental step in numerous applications, such as mesh generation, deformation, texture mapping, and many more. The wide range of applications resulted in definitions for many types of directional fields: from vector and tensor fields, over line and cross fields, to frame and vector-set fields. Depending on the application at hand, researchers have used various notions of objectives and constraints to synthesize such fields. These notions are defined in terms of fairness, feature alignment, symmetry, or field topology, to mention just a few. To facilitate these objectives, various representations, discretizations, and optimization strategies have been developed. These choices come with varying strengths and weaknesses. This course provides a systematic overview of directional field synthesis for graphics applications, the challenges it poses, and the methods developed in recent years to address these challenges.
@inproceedings{Vaxman:2017:DFS:3084873.3084921,
author = {Vaxman, Amir and Campen, Marcel and Diamanti, Olga and Bommes, David and Hildebrandt, Klaus and Technion, Mirela Ben-Chen and Panozzo, Daniele},
title = {Directional Field Synthesis, Design, and Processing},
booktitle = {ACM SIGGRAPH 2017 Courses},
series = {SIGGRAPH '17},
year = {2017},
isbn = {978-1-4503-5014-3},
location = {Los Angeles, California},
pages = {12:1--12:30},
articleno = {12},
numpages = {30},
url = {http://doi.acm.org/10.1145/3084873.3084921},
doi = {10.1145/3084873.3084921},
acmid = {3084921},
publisher = {ACM},
address = {New York, NY, USA},
}
Exploring Spatial Context for 3D Semantic Segmentation of Point Clouds
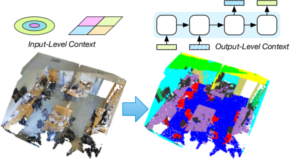
Deep learning approaches have made tremendous progress in the field of semantic segmentation over the past few years. However, most current approaches operate in the 2D image space. Direct semantic segmentation of unstructured 3D point clouds is still an open research problem. The recently proposed PointNet architecture presents an interesting step ahead in that it can operate on unstructured point clouds, achieving decent segmentation results. However, it subdivides the input points into a grid of blocks and processes each such block individually. In this paper, we investigate the question how such an architecture can be extended to incorporate larger-scale spatial context. We build upon PointNet and propose two extensions that enlarge the receptive field over the 3D scene. We evaluate the proposed strategies on challenging indoor and outdoor datasets and show improved results in both scenarios.
@inproceedings{3dsemseg_ICCVW17,
author = {Francis Engelmann and
Theodora Kontogianni and
Alexander Hermans and
Bastian Leibe},
title = {Exploring Spatial Context for 3D Semantic Segmentation of Point Clouds},
booktitle = {{IEEE} International Conference on Computer Vision, 3DRMS Workshop, {ICCV}},
year = {2017}
}
Online Adaptation of Convolutional Neural Networks for Video Object Segmentation
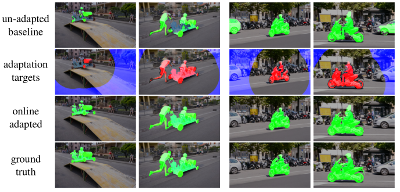
We tackle the task of semi-supervised video object segmentation, i.e. segmenting the pixels belonging to an object in the video using the ground truth pixel mask for the first frame. We build on the recently introduced one-shot video object segmentation (OSVOS) approach which uses a pretrained network and fine-tunes it on the first frame. While achieving impressive performance, at test time OSVOS uses the fine-tuned network in unchanged form and is not able to adapt to large changes in object appearance. To overcome this limitation, we propose Online Adaptive Video Object Segmentation (OnAVOS) which updates the network online using training examples selected based on the confidence of the network and the spatial configuration. Additionally, we add a pretraining step based on objectness, which is learned on PASCAL. Our experiments show that both extensions are highly effective and improve the state of the art on DAVIS to an intersection-over-union score of 85.7%.
@inproceedings{voigtlaender17BMVC,
author = {Paul Voigtlaender and Bastian Leibe},
title = {Online Adaptation of Convolutional Neural Networks for Video Object Segmentation},
booktitle = {BMVC},
year = {2017}
}
Variance-Minimizing Transport Plans for Inter-surface Mapping
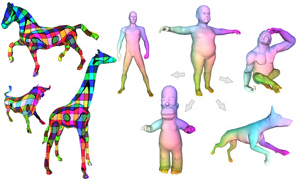
We introduce an efficient computational method for generating dense and low distortion maps between two arbitrary surfaces of same genus. Instead of relying on semantic correspondences or surface parameterization, we directly optimize a variance-minimizing transport plan between two input surfaces that defines an as-conformal-as-possible inter-surface map satisfying a user-prescribed bound on area distortion. The transport plan is computed via two alternating convex optimizations, and is shown to minimize a generalized Dirichlet energy of both the map and its inverse. Computational efficiency is achieved through a coarse-to-fine approach in diffusion geometry, with Sinkhorn iterations modified to enforce bounded area distortion. The resulting inter-surface mapping algorithm applies to arbitrary shapes robustly, with little to no user interaction.
@article{Mandad:2017:Mapping,
author = "Mandad, Manish and Cohen-Steiner, David and Kobbelt, Leif and Alliez, Pierre and Desbrun, Mathieu",
title = "Variance-Minimizing Transport Plans for Inter-surface Mapping",
journal = "ACM Transactions on Graphics",
volume = 36,
number = 4,
year = 2017,
articleno = {39},
}
Robust eXtended Finite Elements for Complex Cutting of Deformables
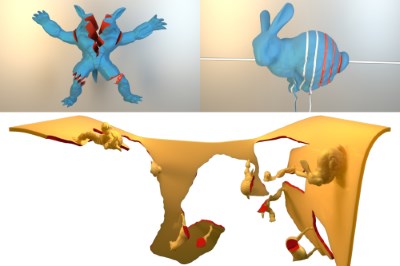
In this paper we present a robust remeshing-free cutting algorithm on the basis of the eXtended Finite Element Method (XFEM) and fully implicit time integration. One of the most crucial points of the XFEM is that integrals over discontinuous polynomials have to be computed on subdomains of the polyhedral elements. Most existing approaches construct a cut-aligned auxiliary mesh for integration. In contrast, we propose a cutting algorithm that includes the construction of specialized quadrature rules for each dissected element without the requirement to explicitly represent the arising subdomains. Moreover, we solve the problem of ill-conditioned or even numerically singular solver matrices during time integration using a novel algorithm that constrains non-contributing degrees of freedom (DOFs) and introduce a preconditioner that efficiently reuses the constructed quadrature weights. Our method is particularly suitable for fine structural cutting as it decouples the added number of DOFs from the cut's geometry and correctly preserves geometry and physical properties by accurate integration. Due to the implicit time integration these fine features can still be simulated robustly using large time steps. As opposed to this, the vast majority of existing approaches either use remeshing or element duplication. Remeshing based methods are able to correctly preserve physical quantities but strongly couple cut geometry and mesh resolution leading to an unnecessary large number of additional DOFs. Element duplication based approaches keep the number of additional DOFs small but fail at correct conservation of mass and stiffness properties. We verify consistency and robustness of our approach on simple and reproducible academic examples while stability and applicability are demonstrated in large scenarios with complex and fine structural cutting.
@ARTICLE{ Koschier2017,
author= {Dan Koschier and Jan Bender and Nils Thuerey},
title= {{Robust eXtended Finite Elements for Complex Cutting of Deformables}},
year= {2017},
journal= {ACM Transactions on Graphics (SIGGRAPH)},
publisher= {ACM},
volume = {36},
number = {4},
pages= {12}
}
Full-Resolution Residual Networks for Semantic Segmentation in Street Scenes
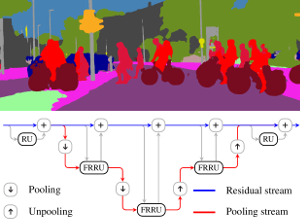
Semantic image segmentation is an essential component of modern autonomous driving systems, as an accurate understanding of the surrounding scene is crucial to navigation and action planning. Current state-of-the-art approaches in semantic image segmentation rely on pre-trained networks that were initially developed for classifying images as a whole. While these networks exhibit outstanding recognition performance (i.e., what is visible?), they lack localization accuracy (i.e., where precisely is something located?). Therefore, additional processing steps have to be performed in order to obtain pixel-accurate segmentation masks at the full image resolution. To alleviate this problem we propose a novel ResNet-like architecture that exhibits strong localization and recognition performance. We combine multi-scale context with pixel-level accuracy by using two processing streams within our network: One stream carries information at the full image resolution, enabling precise adherence to segment boundaries. The other stream undergoes a sequence of pooling operations to obtain robust features for recognition. The two streams are coupled at the full image resolution using residuals. Without additional processing steps and without pre-training, our approach achieves an intersection-over-union score of 71.8% on the Cityscapes dataset.
@inproceedings{Pohlen2017CVPR,
title = {{Full-Resolution Residual Networks for Semantic Segmentation in Street Scenes}},
author = {Pohlen, Tobias and Hermans, Alexander and Mathias, Markus and Leibe, Bastian},
booktitle = {{IEEE Conference on Computer Vision and Pattern Recognition (CVPR'17)}},
year = {2017}
}
Semi-Supervised Deep Learning for Monocular Depth Map Prediction
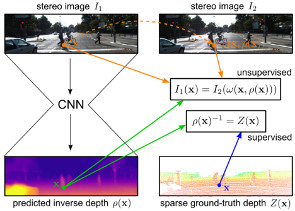
Supervised deep learning often suffers from the lack of sufficient training data. Specifically in the context of monocular depth map prediction, it is barely possible to determine dense ground truth depth images in realistic dynamic outdoor environments. When using LiDAR sensors, for instance, noise is present in the distance measurements, the calibration between sensors cannot be perfect, and the measurements are typically much sparser than the camera images. In this paper, we propose a novel approach to depth map prediction from monocular images that learns in a semi-supervised way. While we use sparse ground-truth depth for supervised learning, we also enforce our deep network to produce photoconsistent dense depth maps in a stereo setup using a direct image alignment loss. In experiments we demonstrate superior performance in depth map prediction from single images compared to the state-of-the-art methods.
@inproceedings{kuznietsov2017_semsupdepth,
title = {Semi-Supervised Deep Learning for Monocular Depth Map Prediction},
author = {Kuznietsov, Yevhen and St\"uckler, J\"org and Leibe, Bastian},
booktitle = {IEEE International Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2017}
}
Combined Image- and World-Space Tracking in Traffic Scenes

Tracking in urban street scenes plays a central role in autonomous systems such as self-driving cars. Most of the current vision-based tracking methods perform tracking in the image domain. Other approaches, e.g. based on LIDAR and radar, track purely in 3D. While some vision-based tracking methods invoke 3D information in parts of their pipeline, and some 3D-based methods utilize image-based information in components of their approach, we propose to use image- and world-space information jointly throughout our method. We present our tracking pipeline as a 3D extension of image-based tracking. From enhancing the detections with 3D measurements to the reported positions of every tracked object, we use world- space 3D information at every stage of processing. We accomplish this by our novel coupled 2D-3D Kalman filter, combined with a conceptually clean and extendable hypothesize-and-select framework. Our approach matches the current state-of-the-art on the official KITTI benchmark, which performs evaluation in the 2D image domain only. Further experiments show significant improvements in 3D localization precision by enabling our coupled 2D-3D tracking.
@inproceedings{Osep17ICRA,
title={Combined Image- and World-Space Tracking in Traffic Scenes},
author={O\v{s}ep, Aljo\v{s}a and Mehner, Wolfgang and Mathias, Markus and Leibe, Bastian},
booktitle={ICRA},
year={2017}
}
Boundary Element Octahedral Fields in Volumes
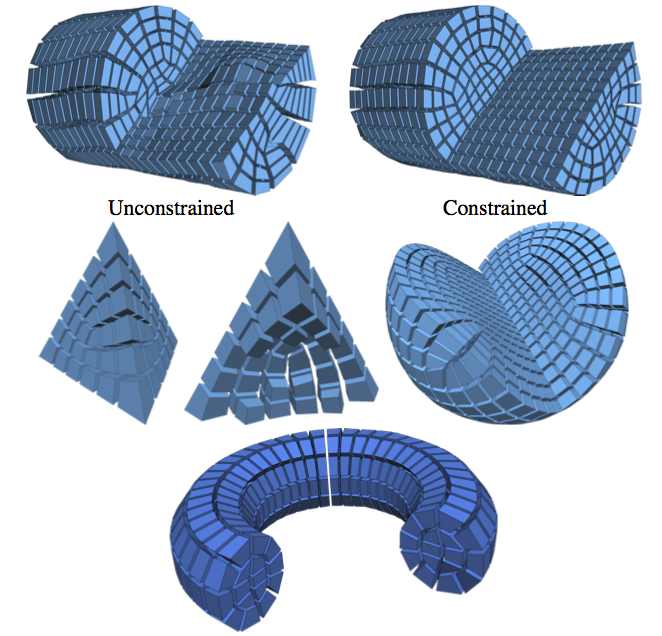
The computation of smooth fields of orthogonal directions within a volume is a critical step in hexahedral mesh generation, used to guide placement of edges and singularities. While this problem shares high-level structure with surface-based frame field problems, critical aspects are lost when extending to volumes, while new structure from the flat Euclidean metric emerges. Taking these considerations into account, this paper presents an algorithm for computing such “octahedral” fields. Unlike existing approaches, our formulation achieves infinite resolution in the interior of the volume via the boundary element method (BEM), continuously assigning frames to points in the interior from only a triangle mesh discretization of the boundary. The end result is an orthogonal direction field that can be sampled anywhere inside the mesh, with smooth variation and singular structure in the interior even with a coarse boundary. We illustrate our computed frames on a number of challenging test geometries. Since the octahedral frame field problem is relatively new, we also contribute a thorough discussion of theoretical and practical challenges unique to this problem.
@article{Solomon:2017:BEO:3087678.3065254,
author = {Solomon, Justin and Vaxman, Amir and Bommes, David},
title = {Boundary Element Octahedral Fields in Volumes},
journal = {ACM Trans. Graph.},
issue_date = {June 2017},
volume = {36},
number = {3},
month = may,
year = {2017},
issn = {0730-0301},
pages = {28:1--28:16},
articleno = {28},
numpages = {16},
url = {http://doi.acm.org/10.1145/3065254},
doi = {10.1145/3065254},
acmid = {3065254},
publisher = {ACM},
address = {New York, NY, USA},
keywords = {Octahedral fields, boundary element method, frames, singularity graph},
}
An hp-Adaptive Discretization Algorithm for Signed Distance Field Generation
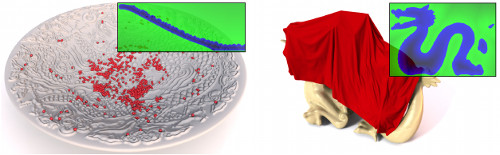
In this paper we present an hp-adaptive algorithm to generate discrete higher-order polynomial Signed Distance Fields (SDFs) on axis-aligned hexahedral grids from manifold polygonal input meshes. Using an orthonormal polynomial basis, we efficiently fit the polynomials to the underlying signed distance function on each cell. The proposed error-driven construction algorithm is globally adaptive and iteratively refines the SDFs using either spatial subdivision (h-refinement) following an octree scheme or by cell-wise adaption of the polynomial approximation's degree (p-refinement). We further introduce a novel decision criterion based on an error-estimator in order to decide whether to apply p- or h-refinement. We demonstrate that our method is able to construct more accurate SDFs at significantly lower memory consumption compared to previous approaches. While the cell-wise polynomial approximation will result in highly accurate SDFs, it can not be guaranteed that the piecewise approximation is continuous over cell interfaces. Therefore, we propose an optimization-based post-processing step in order to weakly enforce continuity. Finally, we apply our generated SDFs as collision detector to the physically-based simulation of geometrically highly complex solid objects in order to demonstrate the practical relevance and applicability of our method.
@Article{KDBB17,
author = {Koschier, Dan and Deul, Crispin and Brand, Magnus and Bender, Jan},
title = {An hp-Adaptive Discretization Algorithm for Signed Distance Field Generation},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2017},
volume = {23},
number = {10},
pages = {1--14},
issn = {1077-2626},
doi = {10.1109/TVCG.2017.2730202}
}
Multi-View Deep Learning for Consistent Semantic Mapping with RGB-D Cameras
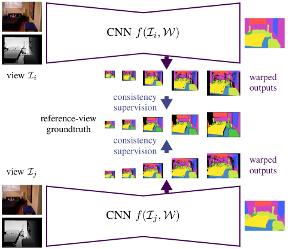
Visual scene understanding is an important capability that enables robots to purposefully act in their environment. In this paper, we propose a novel deep neural network approach to predict semantic segmentation from RGB-D sequences. The key innovation is to train our network to predict multi-view consistent semantics in a self-supervised way. At test time, its semantics predictions can be fused more consistently in semantic keyframe maps than predictions of a network trained on individual views. We base our network architecture on a recent single-view deep learning approach to RGB and depth fusion for semantic object-class segmentation and enhance it with multi-scale loss minimization. We obtain the camera trajectory using RGB-D SLAM and warp the predictions of RGB-D images into ground-truth annotated frames in order to enforce multi-view consistency during training. At test time, predictions from multiple views are fused into keyframes. We propose and analyze several methods for enforcing multi-view consistency during training and testing. We evaluate the benefit of multi-view consistency training and demonstrate that pooling of deep features and fusion over multiple views outperforms single-view baselines on the NYUDv2 benchmark for semantic segmentation. Our end-to-end trained network achieves state-of-the-art performance on the NYUDv2 dataset in single-view segmentation as well as multi-view semantic fusion.
@string{iros="International Conference on Intelligent Robots and Systems (IROS)"}
@InProceedings{lingni17iros,
author = "Lingni Ma and J\"org St\"uckler and Christian Kerl and Daniel Cremers",
title = "Multi-View Deep Learning for Consistent Semantic Mapping with RGB-D Cameras",
booktitle = "IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS)",
year = "2017",
}
Keyframe-Based Visual-Inertial Online SLAM with Relocalization
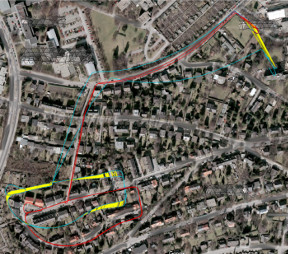
Complementing images with inertial measurements has become one of the most popular approaches to achieve highly accurate and robust real-time camera pose tracking. In this paper, we present a keyframe-based approach to visual-inertial simultaneous localization and mapping (SLAM) for monocular and stereo cameras. Our method is based on a real-time capable visual-inertial odometry method that provides locally consistent trajectory and map estimates. We achieve global consistency in the estimate through online loop-closing and non-linear optimization. Furthermore, our approach supports relocalization in a map that has been previously obtained and allows for continued SLAM operation. We evaluate our approach in terms of accuracy, relocalization capability and run-time efficiency on public benchmark datasets and on newly recorded sequences. We demonstrate state-of-the-art performance of our approach towards a visual-inertial odometry method in recovering the trajectory of the camera.
@article{Kasyanov2017_VISLAM,
title={{Keyframe-Based Visual-Inertial Online SLAM with Relocalization}},
author={Anton Kasyanov and Francis Engelmann and J\"org St\"uckler and Bastian Leibe},
booktitle={{IEEE/RSJ} International Conference on Intelligent Robots and Systems {(IROS)}},
year={2017}
}
SAMP: Shape and Motion Priors for 4D Vehicle Reconstruction

Inferring the pose and shape of vehicles in 3D from a movable platform still remains a challenging task due to the projective sensing principle of cameras, difficult surface properties, e.g. reflections or transparency, and illumination changes between images. In this paper, we propose to use 3D shape and motion priors to regularize the estimation of the trajectory and the shape of vehicles in sequences of stereo images. We represent shapes by 3D signed distance functions and embed them in a low-dimensional manifold. Our optimization method allows for imposing a common shape across all image observations along an object track. We employ a motion model to regularize the trajectory to plausible object motions. We evaluate our method on the KITTI dataset and show state-of-the-art results in terms of shape reconstruction and pose estimation accuracy.
@inproceedings{EngelmannWACV17_samp,
author = {Francis Engelmann and J{\"{o}}rg St{\"{u}}ckler and Bastian Leibe},
title = {{SAMP:} Shape and Motion Priors for 4D Vehicle Reconstruction},
booktitle = {{IEEE} Winter Conference on Applications of Computer Vision,
{WACV}},
year = {2017}
}
Divergence-Free SPH for Incompressible and Viscous Fluids

In this paper we present a novel Smoothed Particle Hydrodynamics (SPH) method for the efficient and stable simulation of incompressible fluids. The most efficient SPH-based approaches enforce incompressibility either on position or velocity level. However, the continuity equation for incompressible flow demands to maintain a constant density and a divergence-free velocity field. We propose a combination of two novel implicit pressure solvers enforcing both a low volume compression as well as a divergence-free velocity field. While a compression-free fluid is essential for realistic physical behavior, a divergence-free velocity field drastically reduces the number of required solver iterations and increases the stability of the simulation significantly. Thanks to the improved stability, our method can handle larger time steps than previous approaches. This results in a substantial performance gain since the computationally expensive neighborhood search has to be performed less frequently. Moreover, we introduce a third optional implicit solver to simulate highly viscous fluids which seamlessly integrates into our solver framework. Our implicit viscosity solver produces realistic results while introducing almost no numerical damping. We demonstrate the efficiency, robustness and scalability of our method in a variety of complex simulations including scenarios with millions of turbulent particles or highly viscous materials.
@article{Bender2017,
author = {Jan Bender and Dan Koschier},
title = {Divergence-Free SPH for Incompressible and Viscous Fluids},
year = {2017},
journal = {IEEE Transactions on Visualization and Computer Graphics},
publisher = {IEEE},
year={2017},
volume={23},
number={3},
pages={1193-1206},
keywords={Smoothed Particle Hydrodynamics;divergence-free fluids;fluid simulation;implicit integration;incompressibility;viscous fluids},
doi={10.1109/TVCG.2016.2578335},
ISSN={1077-2626}
}
Interactive Exploration of Dissipation Element Geometry
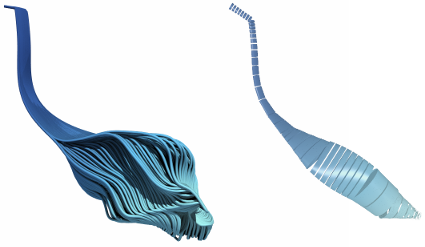
Dissipation elements (DE) define a geometrical structure for the analysis of small-scale turbulence. Existing analyses based on DEs focus on a statistical treatment of large populations of DEs. In this paper, we propose a method for the interactive visualization of the geometrical shape of DE populations. We follow a two-step approach: in a pre-processing step, we approximate individual DEs by tube-like, implicit shapes with elliptical cross sections of varying radii; we then render these approximations by direct ray-casting thereby avoiding the need for costly generation of detailed, explicit geometry for rasterization. Our results demonstrate that the approximation gives a reasonable representation of DE geometries and the rendering performance is suitable for interactive use.
@InProceedings{Vierjahn2017,
booktitle = {Eurographics Symposium on Parallel Graphics and Visualization},
author = {Tom Vierjahn and Andrea Schnorr and Benjamin Weyers and Dominik Denker and Ingo Wald and Christoph Garth and Torsten W. Kuhlen and Bernd Hentschel},
title = {Interactive Exploration of Dissipation Element Geometry},
year = {2017},
pages = {53--62},
ISSN = {1727-348X},
ISBN = {978-3-03868-034-5},
doi = {10.2312/pgv.20171093},
}
A Task-Based Parallel Rendering Component For Large-Scale Visualization Applications
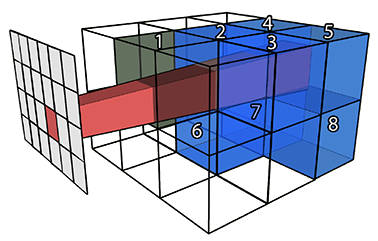
An increasingly heterogeneous system landscape in modern high performance computing requires the efficient and portable adaption of performant algorithms to diverse architectures. However, classic hybrid shared-memory/distributed systems are designed and tuned towards specific platforms, thus impeding development, usage and optimization of these approaches with respect to portability. We demonstrate a flexible parallel rendering framework built upon a task-based dynamic runtime environment enabling adaptable performance-oriented deployment on various platform configurations. Our task definition represents an effective and easy-to-control trade-off between sort-first and sort-last image compositing, enabling good scalability in combination with inherent dynamic load balancing. We conduct comprehensive benchmarks to verify the characteristics and potential of our novel task-based system design for high-performance visualization.
@inproceedings {Biedert2017,
booktitle = {Eurographics Symposium on Parallel Graphics and Visualization},
title = {{A Task-Based Parallel Rendering Component For Large-Scale Visualization Applications}},
author = {Biedert, Tim and Werner, Kilian and Hentschel, Bernd and Garth, Christoph},
year = {2017},
pages = {63--71},
ISSN = {1727-348X},
ISBN = {978-3-03868-034-5},
DOI = {10.2312/pgv.20171094}
}
Measuring Insight into Multi-dimensional Data from a Combination of a Scatterplot Matrix and a HyperSlice Visualization
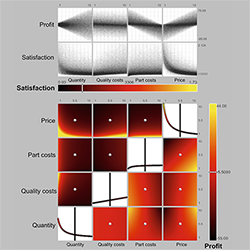
Understanding multi-dimensional data and in particular multi-dimensional dependencies is hard. Information visualization can help to understand this type of data. Still, the problem of how users gain insights from such visualizations is not well understood. Both the visualizations and the users play a role in understanding the data. In a case study, using both, a scatterplot matrix and a HyperSlice with six-dimensional data, we asked 16 participants to think aloud and measured insights during the process of analyzing the data. The amount of insights was strongly correlated with spatial abilities. Interestingly, all users were able to complete an optimization task independently of self-reported understanding of the data.
@Inbook{CaleroValdez2017,
author="Calero Valdez, Andr{\'e}
and Gebhardt, Sascha
and Kuhlen, Torsten W.
and Ziefle, Martina",
editor="Duffy, Vincent G.",
title="Measuring Insight into Multi-dimensional Data from a Combination of a Scatterplot Matrix and a HyperSlice Visualization",
bookTitle="Digital Human Modeling. Applications in Health, Safety, Ergonomics, and Risk Management: Health and Safety: 8th International Conference, DHM 2017, Held as Part of HCI International 2017, Vancouver, BC, Canada, July 9-14, 2017, Proceedings, Part II",
year="2017",
publisher="Springer International Publishing",
address="Cham",
pages="225--236",
isbn="978-3-319-58466-9",
doi="10.1007/978-3-319-58466-9_21",
url="http://dx.doi.org/10.1007/978-3-319-58466-9_21"
}
Interactive Level-of-Detail Visualization of 3D-Polarized Light Imaging Data Using Spherical Harmonics
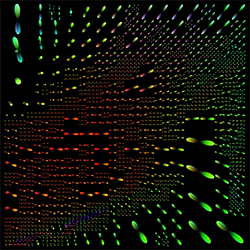
3D-Polarized Light Imaging (3D-PLI) provides data that enables an exploration of brain fibers at very high resolution. However, the visualization poses several challenges. Beside the huge data set sizes, users have to visually perceive the pure amount of information which might be, among other aspects, inhibited for inner structures because of occlusion by outer layers of the brain. We propose a clustering of fiber directions by means of spherical harmonics using a level-of-detail structure by which the user can interactively choose a clustering degree according to the zoom level or details required. Furthermore, the clustering method can be used for the automatic grouping of similar spherical harmonics automatically into one representative. An optional overlay with a direct vector visualization of the 3D-PLI data provides a better anatomical context.
Honorable Mention for Best Short Paper!
@inproceedings {Haenel2017Interactive,
booktitle = {EuroVis 2017 - Short Papers},
editor = {Barbora Kozlikova and Tobias Schreck and Thomas Wischgoll},
title = {{Interactive Level-of-Detail Visualization of 3D-Polarized Light Imaging Data Using Spherical Harmonics}},
author = {H\”anel, Claudia and Demiralp, Ali C. and Axer, Markus and Gr\”assel, David and Hentschel, Bernd and Kuhlen, Torsten W.},
year = {2017},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-043-7},
DOI = {10.2312/eurovisshort.20171145}
}
A Micropolar Material Model for Turbulent SPH Fluids

In this paper we introduce a novel micropolar material model for the simulation of turbulent inviscid fluids. The governing equations are solved by using the concept of Smoothed Particle Hydrodynamics (SPH). As already investigated in previous works, SPH fluid simulations suffer from numerical diffusion which leads to a lower vorticity, a loss in turbulent details and finally in less realistic results. To solve this problem we propose a micropolar fluid model. The micropolar fluid model is a generalization of the classical Navier-Stokes equations, which are typically used in computer graphics to simulate fluids. In contrast to the classical Navier-Stokes model, micropolar fluids have a microstructure and therefore consider the rotational motion of fluid particles. In addition to the linear velocity field these fluids also have a field of microrotation which represents existing vortices and provides a source for new ones. However, classical micropolar materials are viscous and the translational and the rotational motion are coupled in a dissipative way. Since our goal is to simulate turbulent fluids, we introduce a novel modified micropolar material for inviscid fluids with a non-dissipative coupling. Our model can generate realistic turbulences, is linear and angular momentum conserving, can be easily integrated in existing SPH simulation methods and its computational overhead is negligible.
@INPROCEEDINGS{Bender2017,
author = {Jan Bender and Dan Koschier and Tassilo Kugelstadt and Marcel Weiler},
title = {A Micropolar Material Model for Turbulent SPH Fluids},
booktitle = {Proceedings of the 2017 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2017},
publisher = {ACM}
}
Density Maps for Improved SPH Boundary Handling
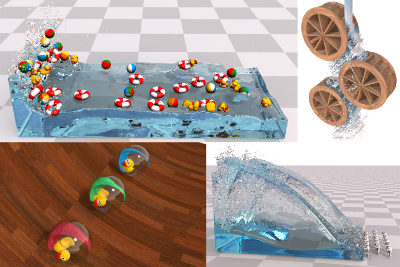
In this paper, we present the novel concept of density maps for robust handling of static and rigid dynamic boundaries in fluid simulations based on Smoothed Particle Hydrodynamics (SPH). In contrast to the vast majority of existing approaches, we use an implicit discretization for a continuous extension of the density field throughout solid boundaries. Using the novel representation we enhance accuracy and efficiency of density and density gradient evaluations in boundary regions by computationally efficient lookups into our density maps. The map is generated in a preprocessing step and discretizes the density contribution in the boundary's near-field. In consequence of the high regularity of the continuous boundary density field, we use cubic Lagrange polynomials on a narrow-band structure of a regular grid for discretization. This strategy not only removes the necessity to sample boundary surfaces with particles but also decouples the particle size from the number of sample points required to represent the boundary. Moreover, it solves the ever-present problem of particle deficiencies near the boundary. In several comparisons we show that the representation is more accurate than particle samplings, especially for smooth curved boundaries. We further demonstrate that our approach robustly handles scenarios with highly complex boundaries and even outperforms one of the most recent sampling based techniques.
@InProceedings{KB17,
author = {Dan Koschier and Jan Bender},
title = {Density Maps for Improved SPH Boundary Handling},
booktitle = {Proceedings of the 2017 ACM SIGGRAPH/Eurographics Symposium on Computer Animation},
year = {2017},
series = {SCA '17},
pages = {1--10},
publisher = {ACM}
}
A Survey on Position Based Dynamics, 2017

The physically-based simulation of mechanical effects has been an important research topic in computer graphics for more than two decades. Classical methods in this field discretize Newton's second law and determine different forces to simulate various effects like stretching, shearing, and bending of deformable bodies or pressure and viscosity of fluids, to mention just a few. Given these forces, velocities and finally positions are determined by a numerical integration of the resulting accelerations. In the last years position-based simulation methods have become popular in the graphics community. In contrast to classical simulation approaches these methods compute the position changes in each simulation step directly, based on the solution of a quasi-static problem. Therefore, position-based approaches are fast, stable and controllable which make them well-suited for use in interactive environments. However, these methods are generally not as accurate as force-based methods but provide visual plausibility. Hence, the main application areas of position-based simulation are virtual reality, computer games and special effects in movies and commercials. In this tutorial we first introduce the basic concept of position-based dynamics. Then we present different solvers and compare them with the variational formulation of the implicit Euler method in connection with compliant constraints. We discuss approaches to improve the convergence of these solvers. Moreover, we show how position-based methods are applied to simulate elastic rods, cloth, volumetric deformable bodies, rigid body systems and fluids. We also demonstrate how complex effects like anisotropy or plasticity can be simulated and introduce approaches to improve the performance. Finally, we give an outlook and discuss open problems.
@inproceedings {BMM2017,
title = "A Survey on Position Based Dynamics, 2017",
author = "Jan Bender and Matthias M{\"u}ller and Miles Macklin",
year = "2017",
booktitle = "EUROGRAPHICS 2017 Tutorials",
publisher = "Eurographics Association"
}
DROW: Real-Time Deep Learning based Wheelchair Detection in 2D Range Data
TL;DR: Collected & annotated laser detection dataset. Use window around each point to cast vote on detection center.
We introduce the DROW detector, a deep learning based detector for 2D range data. Laser scanners are lighting invariant, provide accurate range data, and typically cover a large field of view, making them interesting sensors for robotics applications. So far, research on detection in laser range data has been dominated by hand-crafted features and boosted classifiers, potentially losing performance due to suboptimal design choices. We propose a Convolutional Neural Network (CNN) based detector for this task. We show how to effectively apply CNNs for detection in 2D range data, and propose a depth preprocessing step and voting scheme that significantly improve CNN performance. We demonstrate our approach on wheelchairs and walkers, obtaining state of the art detection results. Apart from the training data, none of our design choices limits the detector to these two classes, though. We provide a ROS node for our detector and release our dataset containing 464k laser scans, out of which 24k were annotated.
@article{BeyerHermans2016RAL,
title = {{DROW: Real-Time Deep Learning based Wheelchair Detection in 2D Range Data}},
author = {Beyer*, Lucas and Hermans*, Alexander and Leibe, Bastian},
journal = {{IEEE Robotics and Automation Letters (RA-L)}},
year = {2016}
}
Comparison of a speech-based and a pie-menu-based interaction metaphor for application control
Choosing an adequate system control technique is crucial to support complex interaction scenarios in virtual reality applications. In this work, we compare an existing hierarchical pie-menu-based approach with a speech-recognition-based one in terms of task performance and user experience in a formal user study. As testbed, we use a factory planning application featuring a large set of system control options.
@INPROCEEDINGS{Pick:691795,
author = {Pick, Sebastian and Puika, Andrew S. and Kuhlen, Torsten},
title = {{C}omparison of a speech-based and a pie-menu-based
interaction metaphor for application control},
address = {Piscataway, NJ},
publisher = {IEEE},
reportid = {RWTH-2017-06169},
pages = {381-382},
year = {2017},
comment = {2017 IEEE Virtual Reality (VR) : proceedings : March 18-22,
2017, Los Angeles, CA, USA / Evan Suma Rosenberg, David M.
Krum, Zachary Wartell, Betty Mohler, Sabarish V. Babu, Frank
Steinicke, and Victoria Interrante ; sponsored by IEEE
Computer Society, Visialization and Graphics Technical
Committee},
booktitle = {2017 IEEE Virtual Reality (VR) :
proceedings : March 18-22, 2017, Los
Angeles, CA, USA / Evan Suma Rosenberg,
David M. Krum, Zachary Wartell, Betty
Mohler, Sabarish V. Babu, Frank
Steinicke, and Victoria Interrante ;
sponsored by IEEE Computer Society,
Visialization and Graphics Technical
Committee},
month = {Mar},
date = {2017-03-18},
organization = {2017 IEEE Virtual Reality, Los
Angeles, CA (USA), 18 Mar 2017 - 22 Mar
2017},
cin = {124620 / 120000 / 080025},
cid = {$I:(DE-82)124620_20151124$ / $I:(DE-82)120000_20140620$ /
$I:(DE-82)080025_20140620$},
pnm = {B-1 - Virtual Production Intelligence},
pid = {G:(DE-82)X080025-B-1},
typ = {PUB:(DE-HGF)7 / PUB:(DE-HGF)8},
UT = {WOS:000403149400114},
doi = {10.1109/VR.2017.7892336},
url = {http://publications.rwth-aachen.de/record/691795},
}
buenoSDIAs: Supporting Desktop Immersive Analytics While Actively Preventing Cybersickness
Immersive data analytics as an emerging research topic in scientific and information visualization has recently been brought back into the focus due to the emergence of low-cost consumer virtual reality hardware. Previous research has shown the positive impact of immersive visualization on data analytics workflows, but in most cases, insights were based on large-screen setups. In contrast, less research focuses on a close integration of immersive technology into existing, i.e., desktop-based data analytics workflows. This implies specific requirements regarding the usability of such systems, which include, i.e., the prevention of cybersickness. In this work, we present a prototypical application, which offers a first set of tools and addresses major challenges for a fully immersive data analytics setting in which the user is sitting at a desktop. In particular, we address the problem of cybersickness by integrating prevention strategies combined with individualized user profiles to maximize time of use.
Online Adaptation of Convolutional Neural Networks for the 2017 DAVIS Challenge on Video Object Segmentation
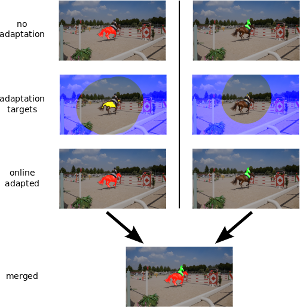
This paper describes our method used for the 2017 DAVIS Challenge on Video Object Segmentation [26]. The challenge’s task is to segment the pixels belonging to multiple objects in a video using the ground truth pixel masks, which are given for the first frame. We build on our recently proposed Online Adaptive Video Object Segmentation (OnAVOS) method which pretrains a convolutional neural network for objectness, fine-tunes it on the first frame, and further updates the network online while processing the video. OnAVOS selects confidently predicted foreground pixels as positive training examples and pixels, which are far away from the last assumed object position as negative examples. While OnAVOS was designed to work with a single object, we extend it to handle multiple objects by combining the predictions of multiple single-object runs. We introduce further extensions including upsampling layers which increase the output resolution. We achieved the fifth place out of 22 submissions to the competition.
@article{voigtlaender17DAVIS,
author = {Paul Voigtlaender and Bastian Leibe},
title = {Online Adaptation of Convolutional Neural Networks for the 2017 DAVIS Challenge on Video Object Segmentation},
journal = {The 2017 DAVIS Challenge on Video Object Segmentation - CVPR Workshops},
year = {2017}
}
Utilizing Immersive Virtual Reality in Everyday Work
Applications of Virtual Reality (VR) have been repeatedly explored with the goal to improve the data analysis process of users from different application domains, such as architecture and simulation sciences. Unfortunately, making VR available in professional application scenarios or even using it on a regular basis has proven to be challenging. We argue that everyday usage environments, such as office spaces, have introduced constraints that critically affect the design of interaction concepts since well-established techniques might be difficult to use. In our opinion, it is crucial to understand the impact of usage scenarios on interaction design, to successfully develop VR applications for everyday use. To substantiate our claim, we define three distinct usage scenarios in this work that primarily differ in the amount of mobility they allow for. We outline each scenario's inherent constraints but also point out opportunities that may be used to design novel, well-suited interaction techniques for different everyday usage environments. In addition, we link each scenario to a concrete application example to clarify its relevance and show how it affects interaction design.
Efficient Approximate Computation of Scene Visibility Based on Navigation Meshes and Applications for Navigation and Scene Analysis
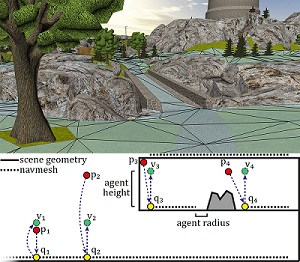
Scene visibility - the information of which parts of the scene are visible from a certain location—can be used to derive various properties of a virtual environment. For example, it enables the computation of viewpoint quality to determine the informativeness of a viewpoint, helps in constructing virtual tours, and allows to keep track of the objects a user may already have seen. However, computing visibility at runtime may be too computationally expensive for many applications, while sampling the entire scene beforehand introduces a costly precomputation step and may include many samples not needed later on.
Therefore, in this paper, we propose a novel approach to precompute visibility information based on navigation meshes, a polygonal representation of a scene’s navigable areas. We show that with only limited precomputation, high accuracy can be achieved in these areas. Furthermore, we demonstrate the usefulness of the approach by means of several applications, including viewpoint quality computation, landmark and room detection, and exploration assistance. In addition, we present a travel interface based on common visibility that we found to result in less cybersickness in a user study.
@INPROCEEDINGS{freitag2017a,
author={Sebastian Freitag and Benjamin Weyers and Torsten W. Kuhlen},
booktitle={2017 IEEE Symposium on 3D User Interfaces (3DUI)},
title={{Efficient Approximate Computation of Scene Visibility Based on Navigation Meshes and Applications for Navigation and Scene Analysis}},
year={2017},
pages={134--143},
}
Approximating Optimal Sets of Views in Virtual Scenes

Viewpoint quality estimation methods allow the determination of the most informative position in a scene. However, a single position usually cannot represent an entire scene, requiring instead a set of several viewpoints. Measuring the quality of such a set of views, however, is not trivial, and the computation of an optimal set of views is an NP-hard problem. Therefore, in this work, we propose three methods to estimate the quality of a set of views. Furthermore, we evaluate three approaches for computing an approximation to the optimal set (two of them new) regarding effectiveness and efficiency.
Assisted Travel Based on Common Visibility and Navigation Meshes
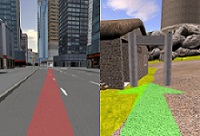
The manual adjustment of travel speed to cover medium or large distances in virtual environments may increase cognitive load, and manual travel at high speeds can lead to cybersickness due to inaccurate steering. In this work, we present an approach to quickly pass regions where the environment does not change much, using automated suggestions based on the computation of common visibility. In a user study, we show that our method can reduce cybersickness when compared with manual speed control.
BlowClick 2.0: A Trigger Based on Non-Verbal Vocal Input
The use of non-verbal vocal input (NVVI) as a hand-free trigger approach has proven to be valuable in previous work [Zielasko2015]. Nevertheless, BlowClick's original detection method is vulnerable to false positives and, thus, is limited in its potential use, e.g., together with acoustic feedback for the trigger. Therefore, we extend the existing approach by adding common machine learning methods. We found that a support vector machine (SVM) with Gaussian kernel performs best for detecting blowing with at least the same latency and more precision as before. Furthermore, we added acoustic feedback to the NVVI trigger, which increases the user's confidence. To evaluate the advanced trigger technique, we conducted a user study (n=33). The results confirm that it is a reliable trigger; alone and as part of a hands-free point-and-click interface.
A Reliable Non-Verbal Vocal Input Metaphor for Clicking

We extended BlowClick, a NVVI metaphor for clicking, by adding machine learning methods to more reliably classify blowing events. We found a support vector machine with Gaussian kernel performing the best with at least the same latency and more precision than before. Furthermore, we added acoustic feedback to the NVVI trigger, which increases the user's confidence. With this extended technique we conducted a user study with 33 participants and could confirm that it is possible to use NVVI as a reliable trigger as part of a hands-free point-and-click interface.
Remain Seated: Towards Fully-Immersive Desktop VR
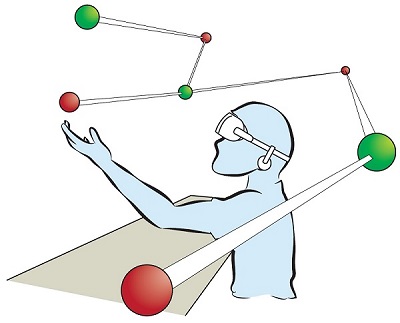
In this work we describe the scenario of fully-immersive desktop VR, which serves the overall goal to seamlessly integrate with existing workflows and workplaces of data analysts and researchers, such that they can benefit from the gain in productivity when immersed in their data-spaces. Furthermore, we provide a literature review showing the status quo of techniques and methods available for realizing this scenario under the raised restrictions. Finally, we propose a concept of an analysis framework and the decisions made and the decisions still to be taken, to outline how the described scenario and the collected methods are feasible in a real use case.
Evaluation of Approaching-Strategies of Temporarily Required Virtual Assistants in Immersive Environments

Embodied, virtual agents provide users assistance in agent-based support systems. To this end, two closely linked factors have to be considered for the agents’ behavioral design: their presence time (PT), i.e., the time in which the agents are visible, and the approaching time (AT), i.e., the time span between the user’s calling for an agent and the agent’s actual availability.
This work focuses on human-like assistants that are embedded in immersive scenes but that are required only temporarily. To the best of our knowledge, guidelines for a suitable trade-off between PT and AT of these assistants do not yet exist. We address this gap by presenting the results of a controlled within-subjects study in a CAVE. While keeping a low PT so that the agent is not perceived as annoying, three strategies affecting the AT, namely fading, walking, and running, are evaluated by 40 subjects. The results indicate no clear preference for either behavior. Instead, the necessity of a better trade-off between a low AT and an agent’s realistic behavior is demonstrated.
@InProceedings{Boensch2017b,
Title = {Evaluation of Approaching-Strategies of Temporarily Required Virtual Assistants in Immersive Environments},
Author = {Andrea B\"{o}nsch and Tom Vierjahn and Torsten W. Kuhlen},
Booktitle = {IEEE Symposium on 3D User Interfaces},
Year = {2017},
Pages = {69-72}
}
From Monocular SLAM to Autonomous Drone Exploration
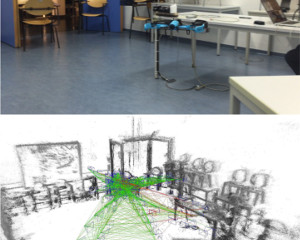
Micro aerial vehicles (MAVs) are strongly limited in their payload and power capacity. In order to implement autonomous navigation, algorithms are therefore desirable that use sensory equipment that is as small, low-weight, and low- power consuming as possible. In this paper, we propose a method for autonomous MAV navigation and exploration using a low-cost consumer-grade quadrocopter equipped with a monocular camera. Our vision-based navigation system builds on LSD-SLAM which estimates the MAV trajectory and a semi-dense reconstruction of the environment in real-time. Since LSD-SLAM only determines depth at high gradient pixels, texture-less areas are not directly observed. We propose an obstacle mapping and exploration approach that takes this property into account. In experiments, we demonstrate our vision-based autonomous navigation and exploration system with a commercially available Parrot Bebop MAV.
@inproceedings{stumberg2017_mavexplore,
author={Lukas von Stumberg and Vladyslav Usenko and Jakob Engel and J\"org St\"uckler and Daniel Cremers},
title={From Monoular {SLAM} to Autonomous Drone Exploration},
booktitle = {Accepted for the European Conference on Mobile Robots (ECMR)},
year = {2017},
}
Gistualizer: An Immersive Glyph for Multidimensional Datapoints
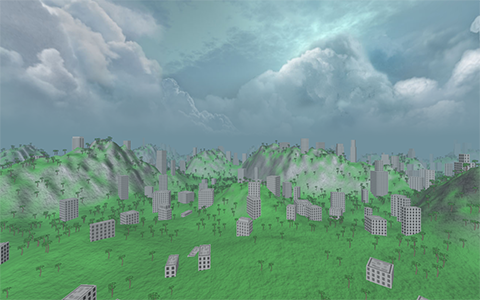
Data from diverse workflows is often too complex for an adequate analysis without visualization. One kind of data are multi-dimensional datasets, which can be visualized via a wide array of techniques. For instance, glyphs can be used to visualize individual datapoints. However, glyphs need to be actively looked at to be comprehended. This work explores a novel approach towards visualizing a single datapoint, with the intention of increasing the user’s awareness of it while they are looking at something else. The basic concept is to represent this point by a scene that surrounds the user in an immersive virtual environment. This idea is based on the observation that humans can extract low-detailed information, the so-called gist, from a scene nearly instantly (equal or less 100ms). We aim at providing a first step towards answering the question whether enough information can be encoded in the gist of a scene to represent a point in multi-dimensional space and if this information is helpful to the user’s understanding of this space.
@inproceedings{Bellgardt2017,
author = {Bellgardt, Martin and Gebhardt, Sascha and Hentschel, Bernd and Kuhlen, Torsten W.},
booktitle = {Workshop on Immersive Analytics},
title = {{Gistualizer: An Immersive Glyph for Multidimensional Datapoints}},
year = {2017}
}
Turning Anonymous Members of a Multiagent System into Individuals
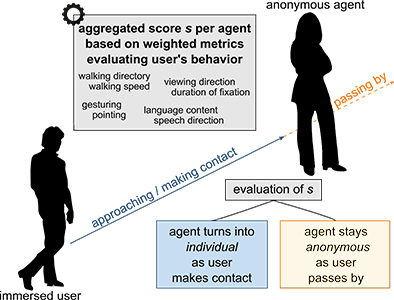
It is increasingly common to embed embodied, human-like, virtual agents into immersive virtual environments for either of the two use cases: (1) populating architectural scenes as anonymous members of a crowd and (2) meeting or supporting users as individual, intelligent and conversational agents. However, the new trend towards intelligent cyber physical systems inherently combines both use cases. Thus, we argue for the necessity of multiagent systems consisting of anonymous and autonomous agents, who temporarily turn into intelligent individuals. Besides purely enlivening the scene, each agent can thus be engaged into a situation-dependent interaction by the user, e.g., into a conversation or a joint task. To this end, we devise components for an agent’s behavioral design modeling the transition between an anonymous and an individual agent when a user approaches.
@InProceedings{Boensch2017c,
Title = {{Turning Anonymous Members of a Multiagent System into Individuals}},
Author = {Andrea B\"{o}nsch, Tom Vierjahn, Ari Shapiro and Torsten W. Kuhlen},
Booktitle = {IEEE Virtual Humans and Crowds for Immersive Environments},
Year = {2017},
Keywords = {Virtual Humans; Virtual Reality; Intelligent Agents; Mutliagent System},
DOI ={ 10.1109/VHCIE.2017.7935620}
Owner = {ab280112},
Timestamp = {2017.02.28}
}
3D Semantic Segmentation of Modular Furniture using rjMCMC

In this paper we propose a novel approach to identify and label the structural elements of furniture e.g. wardrobes, cabinets etc. Given a furniture item, the subdivision into its structural components like doors, drawers and shelves is difficult as the number of components and their spatial arrangements varies severely. Furthermore, structural elements are primarily distinguished by their function rather than by unique color or texture based appearance features. It is therefore difficult to classify them, even if their correct spatial extent were known. In our approach we jointly estimate the number of functional units, their spatial structure, and their corresponding labels by using reversible jump MCMC (rjMCMC), a method well suited for optimization on spaces of varying dimensions (the number of structural elements). Optionally, our system permits to invoke depth information e.g. from RGB-D cameras, which are already frequently mounted on mobile robot platforms. We show a considerable improvement over a baseline method even without using depth data, and an additional performance gain when depth input is enabled.
@inproceedings{badamiWACV17,
title={3D Semantic Segmentation of Modular Furniture using rjMCMC
},
author={Badami, Ishrat and Tom, Manu and Mathias, Markus and Leibe, Bastian},
booktitle={WACV},
year={2017}
}
Poster: Score-Based Recommendation for Efficiently Selecting Individual Virtual Agents in Multi-Agent Systems
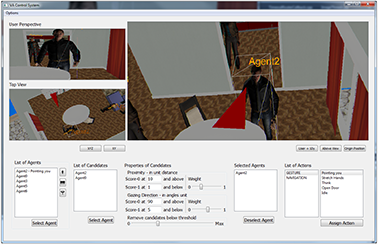
Controlling user-agent-interactions by means of an external operator includes selecting the virtual interaction partners fast and faultlessly. However, especially in immersive scenes with a large number of potential partners, this task is non-trivial.
Thus, we present a score-based recommendation system supporting an operator in the selection task. Agents are recommended as potential partners based on two parameters: the user’s distance to the agents and the user’s gazing direction. An additional graphical user interface (GUI) provides elements for configuring the system and for applying actions to those agents which the operator has confirmed as interaction partners.
@InProceedings{Boensch2017d,
Title = {Score-Based Recommendation for Efficiently Selecting Individual
Virtual Agents in Multi-Agent Systems},
Author = {Andrea Bönsch and Robert Trisnadi and Jonathan Wendt and Tom Vierjahn, and Torsten
W. Kuhlen},
Booktitle = {Proceedings of 23rd ACM
Symposium on Virtual Reality Software and Technology},
Year = {2017},
Pages = {tba},
DOI={10.1145/3139131.3141215}
}
Poster: Towards a Design Space Characterizing Workflows that Take Advantage of Immersive Visualization
Immersive visualization (IV) fosters the creation of mental images of a data set, a scene, a procedure, etc. We devise an initial version of a design space for categorizing workflows that take advantage of IV. From this categorization, specific requirements for seamlessly integrating IV can be derived. We validate the design space with three workflows emerging from our research projects.
@InProceedings{Vierjahn2017,
Title = {Towards a Design Space Characterizing Workflows that Take Advantage of Immersive Visualization},
Author = {Tom Vierjahn and Daniel Zielasko and Kees van Kooten and Peter Messmer and Bernd Hentschel and Torsten W. Kuhlen and Benjamin Weyers},
Booktitle = {IEEE Virtual Reality Conference Poster Proceedings},
Year = {2017},
Pages = {329-330},
DOI={10.1109/VR.2017.7892310}
}
Poster: Peers At Work: Economic Real-Effort Experiments In The Presence of Virtual Co-Workers

Traditionally, experimental economics uses controlled and incentivized field and lab experiments to analyze economic behavior. However, investigating peer effects in the classic settings is challenging due to the reflection problem: Who is influencing whom?
To overcome this, we enlarge the methodological toolbox of these experiments by means of Virtual Reality. After introducing and validating a real-effort sorting task, we embed a virtual agent as peer of a human subject, who independently performs an identical sorting task. We conducted two experiments investigating (a) the subject’s productivity adjustment due to peer effects and (b) the incentive effects on competition. Our results indicate a great potential for Virtual-Reality-based economic experiments.
@InProceedings{Boensch2017a,
Title = {Peers At Work: Economic Real-Effort Experiments In The Presence of Virtual Co-Workers},
Author = {Andrea B\"{o}nsch and Jonathan Wendt and Heiko Overath and Özgür Gürerk and Christine Harbring and Christian Grund and Thomas Kittsteiner and Torsten W. Kuhlen},
Booktitle = {IEEE Virtual Reality Conference Poster Proceedings},
Year = {2017},
Pages = {301-302},
DOI = {10.1109/VR.2017.7892296}
}
A Collaborative Simulation-Analysis Workflow for Computational Neuroscience Using HPC
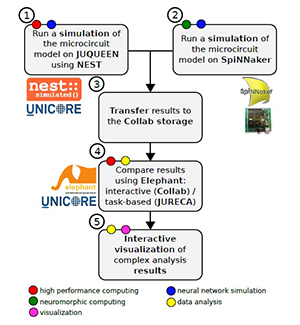
Workflows for the acquisition and analysis of data in the natural sciences exhibit a growing degree of complexity and heterogeneity, are increasingly performed in large collaborative efforts, and often require the use of high-performance computing (HPC). Here, we explore the reasons for these new challenges and demands and discuss their impact, with a focus on the scientific domain of computational neuroscience. We argue for the need for software platforms integrating HPC systems that allow scientists to construct, comprehend and execute workflows composed of diverse processing steps using different tools. As a use case we present a concrete implementation of such a complex workflow, covering diverse topics such as HPC-based simulation using the NEST software, access to the SpiNNaker neuromorphic hardware platform, complex data analysis using the Elephant library, and interactive visualizations. Tools are embedded into a web-based software platform under development by the Human Brain Project, called Collaboratory. On the basis of this implementation, we discuss the state-of-the-art and future challenges in constructing large, collaborative workflows with access to HPC resources.
Virtual Production Intelligence

The research area Virtual Production Intelligence (VPI) focuses on the integrated support of collaborative planning processes for production systems and products. The focus of the research is on processes for information processing in the design domains Factory and Machine. These processes provide the integration and interactive analysis of emerging, mostly heterogeneous planning information. The demonstrators (flapAssist, memoSlice und VPI platform) that are Information systems serve for the validation of the scientific approaches and aim to realize a continuous and consistent information management in terms of the Digital Factory. Central challenges are the semantic information integration (e.g., by means of metamodelling), the subsequent evaluation as well as the visualization of planning information (e.g., by means of Visual Analytics and Virtual Reality). All scientific and technical work is done within an interdisciplinary team composed of engineers, computer scientists and physicists.
@BOOK{Brecher:683508,
key = {683508},
editor = {Brecher, Christian and Özdemir, Denis},
title = {{I}ntegrative {P}roduction {T}echnology : {T}heory and
{A}pplications},
address = {Cham},
publisher = {Springer International Publishing},
reportid = {RWTH-2017-01369},
isbn = {978-3-319-47451-9},
pages = {XXXIX, 1100 Seiten : Illustrationen},
year = {2017},
cin = {417310 / 080025},
cid = {$I:(DE-82)417310_20140620$ / $I:(DE-82)080025_20140620$},
typ = {PUB:(DE-HGF)3},
doi = {10.1007/978-3-319-47452-6},
url = {http://publications.rwth-aachen.de/record/683508},
}
Do Not Invade: A Virtual-Reality-Framework to Study Personal Space
The bachelor thesis’ aim was to develop a framework allowing to design and conduct virtual-reality-based user studies gaining insight into the concept of personal space.
@Article{Schnathmeier2017,
Title = {Do Not Invade: A Virtual-Reality-Framework to Study Personal Space},
Author = {Jan Schnathmeier and Heiko Overath and Sina Radke and Andrea B\"{o}nsch and Ute Habel and Torsten W. Kuhlen},
Journal = {{V}irtuelle und {E}rweiterte {R}ealit\"at, 14. {W}orkshop der {GI}-{F}achgruppe {VR}/{AR}},
Year = {2017},
Pages = {203-204},
ISBN = {978-3-8440-5606-8}
Publisher = {Shaker Verlag}
}
Towards a Principled Integration of Multi-Camera Re-Identification and Tracking through Optimal Bayes Filters
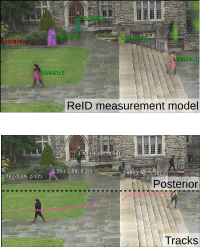
TL;DR: Explorative paper. Learn a Triplet-ReID net, embed the full image. Keep embeddings of known tracks, correlate them with image embeddings and use that as measurement model in a Bayesian filtering tracker. MOT score is mediocre, but framework is theoretically pleasing.
With the rise of end-to-end learning through deep learning, person detectors and re-identification (ReID) models have recently become very strong. Multi-camera multi-target (MCMT) tracking has not fully gone through this transformation yet. We intend to take another step in this direction by presenting a theoretically principled way of integrating ReID with tracking formulated as an optimal Bayes filter. This conveniently side-steps the need for data-association and opens up a direct path from full images to the core of the tracker. While the results are still sub-par, we believe that this new, tight integration opens many interesting research opportunities and leads the way towards full end-to-end tracking from raw pixels.
@article{BeyerBreuers2017Arxiv,
author = {Lucas Beyer and
Stefan Breuers and
Vitaly Kurin and
Bastian Leibe},
title = {{Towards a Principled Integration of Multi-Camera Re-Identification
and Tracking through Optimal Bayes Filters}},
journal = {{2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW)}},
year = {2017},
pages ={1444-1453},
}
In Defense of the Triplet Loss for Person Re-Identification
TL;DR: Use triplet loss, hard-mining inside mini-batch performs great, is similar to offline semi-hard mining but much more efficient.
In the past few years, the field of computer vision has gone through a revolution fueled mainly by the advent of large datasets and the adoption of deep convolutional neural networks for end-to-end learning. The person re-identification subfield is no exception to this, thanks to the notable publication of the Market-1501 and MARS datasets and several strong deep learning approaches. Unfortunately, a prevailing belief in the community seems to be that the triplet loss is inferior to using surrogate losses (classification, verification) followed by a separate metric learning step. We show that, for models trained from scratch as well as pretrained ones, using a variant of the triplet loss to perform end-to-end deep metric learning outperforms any other published method by a large margin.
@article{HermansBeyer2017Arxiv,
title = {{In Defense of the Triplet Loss for Person Re-Identification}},
author = {Hermans*, Alexander and Beyer*, Lucas and Leibe, Bastian},
journal = {arXiv preprint arXiv:1703.07737},
year = {2017}
}
Incremental Object Discovery in Time-Varying Image Collections
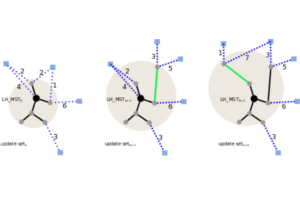
In this paper, we address the problem of object discovery in time-varying, large-scale image collections. A core part of our approach is a novel Limited Horizon Minimum Spanning Tree (LH-MST) structure that closely approximates the Minimum Spanning Tree at a small fraction of the latter’s computational cost. Our proposed tree structure can be created in a local neighborhood of the matching graph during image retrieval and can be efficiently updated whenever the image database is extended. We show how the LH-MST can be used within both single-link hierarchical agglomerative clustering and the Iconoid Shift framework for object discovery in image collections, resulting in significant efficiency gains and making both approaches capable of incremental clustering with online updates. We evaluate our approach on a dataset of 500k images from the city of Paris and compare its results to the batch version of both clustering algorithms.
Non-Linear Shape Optimization Using Local Subspace Projections
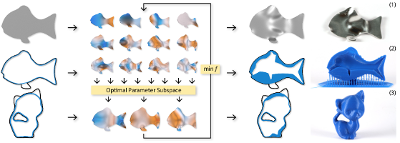
In this paper we present a novel method for non-linear shape opti- mization of 3d objects given by their surface representation. Our method takes advantage of the fact that various shape properties of interest give rise to underdetermined design spaces implying the existence of many good solutions. Our algorithm exploits this by performing iterative projections of the problem to local subspaces where it can be solved much more efficiently using standard numer- ical routines. We demonstrate how this approach can be utilized for various shape optimization tasks using different shape parameteri- zations. In particular, we show how to efficiently optimize natural frequencies, mass properties, as well as the structural yield strength of a solid body. Our method is flexible, easy to implement, and very fast.
@article{Musialski:2016:ShapeOpt,
author = "Musialski, Przemyslaw and Hafner, Christian and Rist, Florian and Birsak, Michael and Wimmer, Michael and Kobbelt, Leif",
title = "Non-Linear Shape Optimization Using Local Subspace Projections",
journal = "ACM Transactions on Graphics",
volume = 35,
number = 4,
year = 2016
}
HexEx: Robust Hexahedral Mesh Extraction
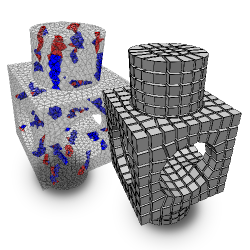
State-of-the-art hex meshing algorithms consist of three steps: Frame-field design, parametrization generation, and mesh extraction. However, while the first two steps are usually discussed in detail, the last step is often not well studied. In this paper, we fully concentrate on reliable mesh extraction.
Parametrization methods employ computationally expensive countermeasures to avoid mapping input tetrahedra to degenerate or flipped tetrahedra in the parameter domain because such a parametrization does not define a proper hexahedral mesh. Nevertheless, there is no known technique that can guarantee the complete absence of such artifacts.
We tackle this problem from the other side by developing a mesh extraction algorithm which is extremely robust against typical imperfections in the parametrization. First, a sanitization process cleans up numerical inconsistencies of the parameter values caused by limited precision solvers and floating-point number representation. On the sanitized parametrization, we extract vertices and so-called darts based on intersections of the integer grid with the parametric image of the tetrahedral mesh. The darts are reliably interconnected by tracing within the parametrization and thus define the topology of the hexahedral mesh. In a postprocessing step, we let certain pairs of darts cancel each other, counteracting the effect of flipped regions of the parametrization. With this strategy, our algorithm is able to robustly extract hexahedral meshes from imperfect parametrizations which previously would have been considered defective. The algorithm will be published as an open source library.
@article{Lyon:2016:HexEx,
author = "Lyon, Max and Bommes, David and Kobbelt, Leif",
title = "HexEx: Robust Hexahedral Mesh Extraction",
journal = "ACM Transactions on Graphics",
volume = 35,
number = 4,
year = 2016
}
Interactively Controlled Quad Remeshing of High Resolution 3D Models
Parametrization based methods have recently become very popular for the generation of high quality quad meshes. In contrast to previous approaches, they allow for intuitive user control in order to accommodate all kinds of application driven constraints and design intentions. A major obstacle in practice, however, are the relatively long computations that lead to response times of several minutes already for input models of moderate complexity. In this paper we introduce a novel strategy to handle highly complex input meshes with up to several millions of triangles such that quad meshes can still be created and edited within an interactive workflow. Our method is based on representing the input model on different levels of resolution with a mechanism to propagate parametrizations from coarser to finer levels. The major challenge is to guarantee consistent parametrizations even in the presence of charts, transition functions, and singularities. Moreover, the remaining degrees of freedom on coarser levels of resolution have to be chosen carefully in order to still achieve low distortion parametrizations. We demonstrate a prototypic system where the user can interactively edit quad meshes with powerful high-level operations such as guiding constraints, singularity repositioning, and singularity connections.
@article{esck2016,
author = {Ebke, Hans-Christian and Schmidt, Patrick and Campen, Marcel and Kobbelt, Leif},
title = {Interactively Controlled Quad Remeshing of High Resolution 3D Models},
journal = {ACM Trans. Graph.},
issue_date = {November 2016},
volume = {35},
number = {6},
month = nov,
year = {2016},
issn = {0730-0301},
pages = {218:1--218:13},
articleno = {218},
url = {http://doi.acm.org/10.1145/2980179.2982413},
doi = {10.1145/2980179.2982413},
acmid = {2982413},
publisher = {ACM},
address = {New York, NY, USA},
}
Error-Bounded and Feature Preserving Surface Remeshing with Minimal Angle Improvement
The typical goal of surface remeshing consists in finding a mesh that is (1) geometrically faithful to the original geometry, (2) as coarse as possible to obtain a low-complexity representation and (3) free of bad elements that would hamper the desired application. In this paper, we design an algorithm to address all three optimization goals simultaneously. The user specifies desired bounds on approximation error (delta), minimal interior angle (theta) and maximum mesh complexity N (number of vertices). Since such a desired mesh might not even exist, our optimization framework treats only the approximation error bound (delta) as a hard constraint and the other two criteria as optimization goals. More specifically, we iteratively perform carefully prioritized local operators, whenever they do not violate the approximation error bound and improve the mesh otherwise. Our optimization framework greedily searches for the coarsest mesh with minimal interior angle above (theta) and approximation error bounded by (delta). Fast runtime is enabled by a local approximation error estimation, while implicit feature preservation is obtained by specifically designed vertex relocation operators. Experiments show that our approach delivers high-quality meshes with implicitly preserved features and better balances between geometric fidelity, mesh complexity and element quality than the state-of-the-art.
@article{hu2016error,
title={Error-Bounded and Feature Preserving Surface Remeshing with Minimal Angle Improvement.},
author={Hu, K and Yan, DM and Bommes, D and Alliez, P and Benes, B},
journal={IEEE transactions on visualization and computer graphics},
year={2016}
}
Directional Field Synthesis, Design, and Processing
Direction fields and vector fields play an increasingly important role in computer graphics and geometry processing. The synthesis of directional fields on surfaces, or other spatial domains, is a fundamental step in numerous applications, such as mesh generation, deformation, texture mapping, and many more. The wide range of applications resulted in definitions for many types of directional fields: from vector and tensor fields, over line and cross fields, to frame and vector-set fields. Depending on the application at hand, researchers have used various notions of objectives and constraints to synthesize such fields. These notions are defined in terms of fairness, feature alignment, symmetry, or field topology, to mention just a few. To facilitate these objectives, various representations, discretizations, and optimization strategies have been developed. These choices come with varying strengths and weaknesses. This report provides a systematic overview of directional field synthesis for graphics applications, the challenges it poses, and the methods developed in recent years to address these challenges.
PatchIt: Self-supervised Network Weight Initialization for Fine-grained Recognition
ConvNet training is highly sensitive to initialization of the weights. A widespread approach is to initialize the network with weights trained for a different task, an auxiliary task. The ImageNet-based ILSVRC classification task is a very popular choice for this, as it has shown to produce powerful feature representations applicable to a wide variety of tasks. However, this creates a significant entry barrier to exploring non-standard architectures. In this paper, we propose a self-supervised pretraining, the PatchTask, to obtain weight initializations for fine-grained recognition problems, such as person attribute recognition, pose estimation, or action recognition. Our pretraining allows us to leverage additional unlabeled data from the same source, which is often readily available, such as detection bounding boxes. We experimentally show that our method outperforms a standard random initialization by a considerable margin and closely matches the ImageNet-based initialization.
@InProceedings{Sudowe16BMVC,
author = {Patrick Sudowe and Bastian Leibe},
title = {{PatchIt: Self-Supervised Network Weight Initialization for Fine-grained Recognition}},
booktitle = BMVC,
year = {2016}
}
Unsupervised Learning of Shape-Motion Patterns for Objects in Urban Street Scenes
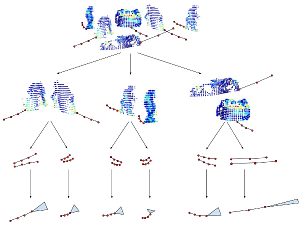
Tracking in urban street scenes is predominantly based on pretrained object-specific detectors and Kalman filter based tracking. More recently, methods have been proposed that track objects by modelling their shape, as well as ones that predict the motion of ob- jects using learned trajectory models. In this paper, we combine these ideas and propose shape-motion patterns (SMPs) that incorporate shape as well as motion to model a vari- ety of objects in an unsupervised way. By using shape, our method can learn trajectory models that distinguish object categories with distinct behaviour. We develop methods to classify objects into SMPs and to predict future motion. In experiments, we analyze our learned categorization and demonstrate superior performance of our motion predictions compared to a Kalman filter and a learned pure trajectory model. We also demonstrate how SMPs can indicate potentially harmful situations in traffic scenarios.
@inproceedings{klostermann2016_smps,
title = {Unsupervised Learning of Shape-Motion Patterns for Objects in Urban Street Scenes},
author = {Dirk Klostermann and Aljosa Osep and J\"org St\"uckler and Bastian Leibe},
booktitle = {Proc. of the British Machine Vision Conference (BMVC)},
year = {2016}, note = {to appear}
}
Scene Flow Propagation for Semantic Mapping and Object Discovery in Dynamic Street Scenes
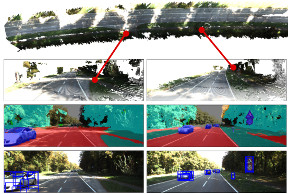
Scene understanding is an important prerequisite for vehicles and robots that operate autonomously in dynamic urban street scenes. For navigation and high-level behavior planning, the robots not only require a persistent 3D model of the static surroundings - equally important, they need to perceive and keep track of dynamic objects. In this paper, we propose a method that incrementally fuses stereo frame observations into temporally consistent semantic 3D maps. In contrast to previous work, our approach uses scene flow to propagate dynamic objects within the map. Our method provides a persistent 3D occupancy as well as semantic belief on static as well as moving objects. This allows for advanced reasoning on objects despite noisy single-frame observations and occlusions. We develop a novel approach to discover object instances based on the temporally consistent shape, appearance, motion, and semantic cues in our maps. We evaluate our approaches to dynamic semantic mapping and object discovery on the popular KITTI benchmark and demonstrate improved results compared to single-frame methods.
@inproceedings{kochanov2016_sceneflowprop,
title = {Scene Flow Propagation for Semantic Mapping and Object Discovery in Dynamic Street Scenes},
author = {Deyvid Kochanov and Aljosa Osep and J\"org St\"uckler and Bastian Leibe},
booktitle = {Proc. of the IEEE Int. Conf. on Intelligent Robots and Systems (IROS)}, year = {2016},
note = {to appear}
}
Joint Object Pose Estimation and Shape Reconstruction in Urban Street Scenes Using 3D Shape Priors

Estimating the pose and 3D shape of a large variety of instances within an object class from stereo images is a challenging problem, especially in realistic conditions such as urban street scenes. We propose a novel approach for using compact shape manifolds of the shape within an object class for object segmentation, pose and shape estimation. Our method first detects objects and estimates their pose coarsely in the stereo images using a state-of-the-art 3D object detection method. An energy minimization method then aligns shape and pose concurrently with the stereo reconstruction of the object. In experiments, we evaluate our approach for detection, pose and shape estimation of cars in real stereo images of urban street scenes. We demonstrate that our shape manifold alignment method yields improved results over the initial stereo reconstruction and object detection method in depth and pose accuracy.
@inproceedings{EngelmannGCPR16_shapepriors,
title = {Joint Object Pose Estimation and Shape Reconstruction in Urban Street Scenes Using {3D} Shape Priors},
author = {Francis Engelmann and J\"org St\"uckler and Bastian Leibe},
booktitle = {Proc. of the German Conference on Pattern Recognition (GCPR)},
year = {2016}}
Multi-Scale Object Candidates for Generic Object Tracking in Street Scenes

Most vision based systems for object tracking in urban environments focus on a limited number of important object categories such as cars or pedestrians, for which powerful detectors are available. However, practical driving scenarios contain many additional objects of interest, for which suitable detectors either do not yet exist or would be cumbersome to obtain. In this paper we propose a more general tracking approach which does not follow the often used tracking-by- detection principle. Instead, we investigate how far we can get by tracking unknown, generic objects in challenging street scenes. As such, we do not restrict ourselves to only tracking the most common categories, but are able to handle a large variety of static and moving objects. We evaluate our approach on the KITTI dataset and show competitive results for the annotated classes, even though we are not restricted to them.
@inproceedings{Osep16ICRA,
title={Multi-Scale Object Candidates for Generic Object Tracking in Street
Scenes},
author={O\v{s}ep, Aljo\v{s}a and Hermans, Alexander and Engelmann, Francis and Klostermann, Dirk and and Mathias, Markus and Leibe, Bastian},
booktitle={ICRA},
year={2016}
}
Adapting Feature Curve Networks to a Prescribed Scale
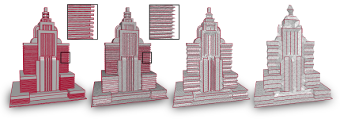
Feature curves on surface meshes are usually defined solely based on local shape properties such as dihedral angles and principal curvatures. From the application perspective, however, the meaningfulness of a network of feature curves also depends on a global scale parameter that takes the distance between feature curves into account, i.e., on a coarse scale, nearby feature curves should be merged or suppressed if the surface region between them is not representable at the given scale/resolution. In this paper, we propose a computational approach to the intuitive notion of scale conforming feature curve networks where the density of feature curves on the surface adapts to a global scale parameter. We present a constrained global optimization algorithm that computes scale conforming feature curve networks by eliminating curve segments that represent surface features, which are not compatible to the prescribed scale. To demonstrate the usefulness of our approach we apply isotropic and anisotropic remeshing schemes that take our feature curve networks as input. For a number of example meshes, we thus generate high quality shape approximations at various levels of detail.
@inproceedings{gehre2016adapting,
title={Adapting Feature Curve Networks to a Prescribed Scale},
author={Gehre, Anne and Lim, Isaak and Kobbelt, Leif},
booktitle={Computer Graphics Forum},
volume={35},
number={2},
pages={319--330},
year={2016},
organization={Wiley Online Library}
}
Improved Surface Quality in 3D Printing by Optimizing the Printing Direction
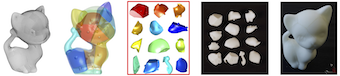
We present a pipeline of algorithms that decomposes a given polygon model into parts such that each part can be 3D printed with high (outer) surface quality. For this we exploit the fact that most 3D printing technologies have an anisotropic resolution and hence the surface smoothness varies significantly with the orientation of the surface. Our pipeline starts by segmenting the input surface into patches such that their normals can be aligned perpendicularly to the printing direction. A 3D Voronoi diagram is computed such that the intersections of the Voronoi cells with the surface approximate these surface patches. The intersections of the Voronoi cells with the input model's volume then provide an initial decomposition. We further present an algorithm to compute an assembly order for the parts and generate connectors between them. A post processing step further optimizes the seams between segments to improve the visual quality. We run our pipeline on a wide range of 3D models and experimentally evaluate the obtained improvements in terms of numerical, visual, and haptic quality.
CPA-SLAM: Consistent Plane-Model Alignment for Direct RGB-D SLAM
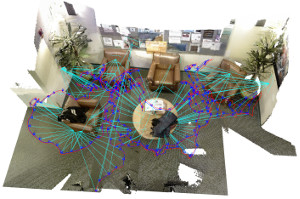
Planes are predominant features of man-made environments which have been exploited in many mapping approaches. In this paper, we propose a real-time capable RGB-D SLAM system that consistently integrates frame-to-keyframe and frame-to-plane alignment. Our method models the environment with a global plane model and – besides direct image alignment – it uses the planes for tracking and global graph optimization. This way, our method makes use of the dense image information available in keyframes for accurate short-term tracking. At the same time it uses a global model to reduce drift. Both components are integrated consistently in an expectation-maximization framework. In experiments, we demonstrate the benefits our approach and its state-of-the-art accuracy on challenging benchmarks.
@InProceedings{lingni16icra,
author = "L. Ma and C. Kerl and J. Stueckler and D. Cremers",
title = "CPA-SLAM: Consistent Plane-Model Alignment for Direct RGB-D SLAM",
booktitle = "Int. Conf. on Robotics and Automation",
year = "2016",
month = "May",
}
Direct Visual-Inertial Odometry with Stereo Cameras

We propose a novel direct visual-inertial odometry method for stereo cameras. Camera pose, velocity and IMU biases are simultaneously estimated by minimizing a combined photometric and inertial energy functional. This allows us to exploit the complementary nature of vision and inertial data. At the same time, and in contrast to all existing visual-inertial methods, our approach is fully direct: geometry is estimated in the form of semi-dense depth maps instead of manually designed sparse keypoints. Depth information is obtained both from static stereo – relating the fixed-baseline images of the stereo camera – and temporal stereo – relating images from the same camera, taken at different points in time. We show that our method outperforms not only vision-only or loosely coupled approaches, but also can achieve more accurate results than state-of-the-art keypoint-based methods on different datasets, including rapid motion and significant illumination changes. In addition, our method provides high-fidelity semi-dense, metric reconstructions of the environment, and runs in real-time on a CPU.
@InProceedings{usenko16icra,
title = "Direct Visual-Inertial Odometry with Stereo Cameras",
author = "V. Usenko and J. Engel and J. Stueckler and D. Cremers",
booktitle = {Int. Conf. on Robotics and Automation},
year = "2016",
}
Position and Orientation Based Cosserat Rods
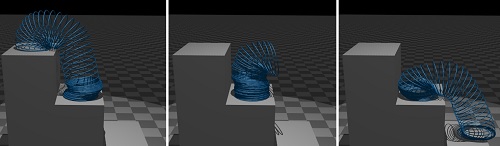
We present a novel method to simulate bending and torsion of elastic rods within the position-based dynamics (PBD) framework. The main challenge is that torsion effects of Cosserat rods are described in terms of material frames which are attached to the centerline of the rod. But frames or orientations do not fit into the classical position-based dynamics formulation. To solve this problem we introduce new types of constraints to couple orientations which are represented by unit quaternions. For constraint projection quaternions are treated in the exact same way as positions. Unit length is enforced with an additional constraint. This allows us to use the strain measures form Cosserat theory directly as constraints in PBD. It leads to very simple algebraic expressions for the correction displacements which only contain quaternion products and additions. Our results show that our method is very robust and accurately produces the complex bending and torsion effects of rods. Due to its simplicity our method is very efficient and more than one order of magnitude faster than existing position-based rod simulation methods. It even achieves the same performance as position-based simulations without torsion effects.
@INPROCEEDINGS{Kugelstadt2016,
author = {Tassilo Kugelstadt and Elmar Schoemer},
title = {Position and Orientation Based Cosserat Rods},
booktitle = {Proceedings of the 2016 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2016},
publisher = {Eurographics Association},
location = {Zurich, Switzerland}
}
Mobile Manipulation, Tool Use, and Intuitive Interaction for Cognitive Service Robot Cosero

Cognitive service robots that shall assist persons in need of performing their activities of daily living have recently received much attention in robotics research. Such robots require a vast set of control and perception capabilities to provide useful assistance through mobile manipulation and human–robot interaction. In this article, we present hardware design, perception, and control methods for our cognitive service robot Cosero. We complement autonomous capabilities with handheld teleoperation interfaces on three levels of autonomy. The robot demonstrated various advanced skills, including the use of tools. With our robot, we participated in the annual international RoboCup@Home competitions, winning them three times in a row.
@ARTICLE{stueckler2016_cosero,
AUTHOR={St\"uckler, J\"org and Schwarz, Max and Behnke, Sven},
TITLE={Mobile Manipulation, Tool Use, and Intuitive Interaction for Cognitive Service Robot Cosero},
JOURNAL={Frontiers in Robotics and AI},
VOLUME={3},
PAGES={58},
YEAR={2016},
URL={http://journal.frontiersin.org/article/10.3389/frobt.2016.00058},
DOI={10.3389/frobt.2016.00058},
}
MobileVideoTiles: Video Display on Multiple Mobile Devices

Modern mobile phones can capture and process high quality videos, which makes them a very popular tool to create and watch video content. However when watching a video together with a group, it is not convenient to watch on one mobile display due to its small form factor. One idea is to combine multiple mobile displays together to create a larger interactive surface for sharing visual content. However so far a practical framework supporting synchronous video playback on multiple mobile displays is still missing. We present the design of “MobileVideoTiles”, a mobile application that enables users to watch local or online videos on a big virtual screen composed of multiple mobile displays. We focus on improving video quality and usability of the tiled virtual screen. The major technical contributions include: mobile peer-to-peer video streaming, playback synchronization, and accessibility of video resources. The prototype application has got several thousand downloads since release and re ceived very positive feedback from users.
Hierarchical hp-Adaptive Signed Distance Fields
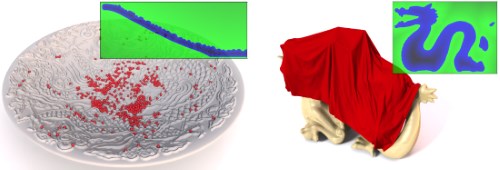
In this paper we propose a novel method to construct hierarchical $hp$-adaptive Signed Distance Fields (SDFs). We discretize the signed distance function of an input mesh using piecewise polynomials on an axis-aligned hexahedral grid. Besides spatial refinement based on octree subdivision to refine the cell size (h), we hierarchically increase each cell's polynomial degree (p) in order to construct a very accurate but memory-efficient representation. Presenting a novel criterion to decide whether to apply h- or p-refinement, we demonstrate that our method is able to construct more accurate SDFs at significantly lower memory consumption than previous approaches. Finally, we demonstrate the usage of our representation as collision detector for geometrically highly complex solid objects in the application area of physically-based simulation.
@INPROCEEDINGS{Koschier2016,
author = {Dan Koschier and Crispin Deul and Jan Bender},
title = {Hierarchical hp-Adaptive Signed Distance Fields},
booktitle = {Proceedings of the 2016 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2016},
publisher = {Eurographics Association},
location = {Zurich, Switzerland}
}
Scale-Invariant Directional Alignment of Surface Parametrizations
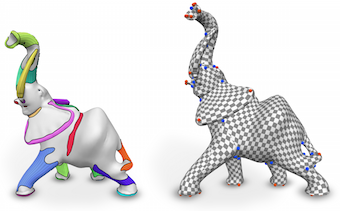
Various applications of global surface parametrization benefit from the alignment of parametrization isolines with principal curvature directions. This is particularly true for recent parametrization-based meshing approaches, where this directly translates into a shape-aware edge flow, better approximation quality, and reduced meshing artifacts. Existing methods to influence a parametrization based on principal curvature directions suffer from scale-dependence, which implies the necessity of parameter variation, or try to capture complex directional shape features using simple 1D curves. Especially for non-sharp features, such as chamfers, fillets, blends, and even more for organic variants thereof, these abstractions can be unfit. We present a novel approach which respects and exploits the 2D nature of such directional feature regions, detects them based on coherence and homogeneity properties, and controls the parametrization process accordingly. This approach enables us to provide an intuitive, scale-invariant control parameter to the user. It also allows us to consider non-local aspects like the topology of a feature, enabling further improvements. We demonstrate that, compared to previous approaches, global parametrizations of higher quality can be generated without user intervention.
@article{Campen:2016:ScaleInvariant,
author = "Campen, Marcel and Ibing, Moritz and Ebke, Hans-Christian and Zorin, Denis and Kobbelt, Leif",
title = "Scale-Invariant Directional Alignment of Surface Parametrizations",
journal = "Computer Graphics Forum",
volume = 35,
number = 5,
year = 2016
}
Identifying Style of 3D Shapes using Deep Metric Learning
We present a method that expands on previous work in learning human perceived style similarity across objects with different structures and functionalities. Unlike previous approaches that tackle this problem with the help of hand-crafted geometric descriptors, we make use of recent advances in metric learning with neural networks (deep metric learning). This allows us to train the similarity metric on a shape collection directly, since any low- or high-level features needed to discriminate between different styles are identified by the neural network automatically. Furthermore, we avoid the issue of finding and comparing sub-elements of the shapes. We represent the shapes as rendered images and show how image tuples can be selected, generated and used efficiently for deep metric learning. We also tackle the problem of training our neural networks on relatively small datasets and show that we achieve style classification accuracy competitive with the state of the art. Finally, to reduce annotation effort we propose a method to incorporate heterogeneous data sources by adding annotated photos found online in order to expand or supplant parts of our training data.
@article{Lim:2016:StyleLearning,
author = "Lim, Isaak and Gehre, Anne and Kobbelt, Leif",
title = "Identifying Style of 3D Shapes using Deep Metric Learning",
journal = "Computer Graphics Forum",
volume = 35,
number = 5,
year = 2016
}
Accurate and adaptive contact modeling for multi-rate multi-point haptic rendering of static and deformable environments

Common approaches for the haptic rendering of complex scenarios employ multi-rate simulation schemes. Here, the collision queries or the simulation of a complex deformable object are often performed asynchronously at a lower frequency, while some kind of intermediate contact representation is used to simulate interactions at the haptic rate. However, this can produce artifacts in the haptic rendering when the contact situation quickly changes and the intermediate representation is not able to reflect the changes due to the lower update rate.
We address this problem utilizing a novel contact model. It facilitates the creation of contact representations that are accurate for a large range of motions and multiple simulation time-steps. We handle problematic geometrically convex contact regions using a local convex decomposition and special constraints for convex areas. We combine our accurate contact model with an implicit temporal integration scheme to create an intermediate mechanical contact representation, which reflects the dynamic behavior of the simulated objects. To maintain a haptic real time simulation, the size of the region modeled by the contact representation is automatically adapted to the complexity of the geometry in contact. Moreover, we propose a new iterative solving scheme for the involved constrained dynamics problems. We increase the robustness of our method using techniques from trust region-based optimization. Our approach can be combined with standard methods for the modeling of deformable objects or constraint-based approaches for the modeling of, for instance, friction or joints. We demonstrate its benefits with respect to the simulation accuracy and the quality of the rendered haptic forces in several scenarios with one or more haptic proxies.
@Article{Knott201668,
Title = {Accurate and adaptive contact modeling for multi-rate multi-point haptic rendering of static and deformable environments },
Author = {Thomas C. Knott and Torsten W. Kuhlen},
Journal = {Computers \& Graphics },
Year = {2016},
Pages = {68 - 80},
Volume = {57},
Abstract = {Abstract Common approaches for the haptic rendering of complex scenarios employ multi-rate simulation schemes. Here, the collision queries or the simulation of a complex deformable object are often performed asynchronously at a lower frequency, while some kind of intermediate contact representation is used to simulate interactions at the haptic rate. However, this can produce artifacts in the haptic rendering when the contact situation quickly changes and the intermediate representation is not able to reflect the changes due to the lower update rate. We address this problem utilizing a novel contact model. It facilitates the creation of contact representations that are accurate for a large range of motions and multiple simulation time-steps. We handle problematic geometrically convex contact regions using a local convex decomposition and special constraints for convex areas. We combine our accurate contact model with an implicit temporal integration scheme to create an intermediate mechanical contact representation, which reflects the dynamic behavior of the simulated objects. To maintain a haptic real time simulation, the size of the region modeled by the contact representation is automatically adapted to the complexity of the geometry in contact. Moreover, we propose a new iterative solving scheme for the involved constrained dynamics problems. We increase the robustness of our method using techniques from trust region-based optimization. Our approach can be combined with standard methods for the modeling of deformable objects or constraint-based approaches for the modeling of, for instance, friction or joints. We demonstrate its benefits with respect to the simulation accuracy and the quality of the rendered haptic forces in several scenarios with one or more haptic proxies. },
Doi = {http://dx.doi.org/10.1016/j.cag.2016.03.007},
ISSN = {0097-8493},
Keywords = {Haptic rendering},
Url = {http://www.sciencedirect.com/science/article/pii/S0097849316300206}
}
Interactive 3D Force-Directed Edge Bundling
Interactive analysis of 3D relational data is challenging. A common way of representing such data are node-link diagrams as they support analysts in achieving a mental model of the data. However, naïve 3D depictions of complex graphs tend to be visually cluttered, even more than in a 2D layout. This makes graph exploration and data analysis less efficient. This problem can be addressed by edge bundling. We introduce a 3D cluster-based edge bundling algorithm that is inspired by the force-directed edge bundling (FDEB) algorithm [Holten2009] and fulfills the requirements to be embedded in an interactive framework for spatial data analysis. It is parallelized and scales with the size of the graph regarding the runtime. Furthermore, it maintains the edge’s model and thus supports rendering the graph in different structural styles. We demonstrate this with a graph originating from a simulation of the function of a macaque brain.
Visual Quality Adjustment for Volume Rendering in a Head-Tracked Virtual Environment
To avoid simulator sickness and improve presence in immersive virtual environments (IVEs), high frame rates and low latency are required. In contrast, volume rendering applications typically strive for high visual quality that induces high computational load and, thus, leads to low frame rates. To evaluate this trade-off in IVEs, we conducted a controlled user study with 53 participants. Search and count tasks were performed in a CAVE with varying volume rendering conditions which are applied according to viewer position updates corresponding to head tracking. The results of our study indicate that participants preferred the rendering condition with continuous adjustment of the visual quality over an instantaneous adjustment which guaranteed for low latency and over no adjustment providing constant high visual quality but rather low frame rates. Within the continuous condition, the participants showed best task performance and felt less disturbed by effects of the visualization during movements. Our findings provide a good basis for further evaluations of how to accelerate volume rendering in IVEs according to user’s preferences.
@article{Hanel2016,
author = { H{\"{a}}nel, Claudia and Weyers, Benjamin and Hentschel, Bernd and Kuhlen, Torsten W.},
doi = {10.1109/TVCG.2016.2518338},
issn = {10772626},
journal = {IEEE Transactions on Visualization and Computer Graphics},
number = {4},
pages = {1472--1481},
pmid = {26780811},
title = {{Visual Quality Adjustment for Volume Rendering in a Head-Tracked Virtual Environment}},
volume = {22},
year = {2016}
}
Examining Rotation Gain in CAVE-like Virtual Environments

When moving through a tracked immersive virtual environment, it is sometimes useful to deviate from the normal one-to-one mapping of real to virtual motion. One option is the application of rotation gain, where the virtual rotation of a user around the vertical axis is amplified or reduced by a factor. Previous research in head-mounted display environments has shown that rotation gain can go unnoticed to a certain extent, which is exploited in redirected walking techniques. Furthermore, it can be used to increase the effective field of regard in projection systems. However, rotation gain has never been studied in CAVE systems, yet. In this work, we present an experiment with 87 participants examining the effects of rotation gain in a CAVE-like virtual environment. The results show no significant effects of rotation gain on simulator sickness, presence, or user performance in a cognitive task, but indicate that there is a negative influence on spatial knowledge especially for inexperienced users. In secondary results, we could confirm results of previous work and demonstrate that they also hold for CAVE environments, showing a negative correlation between simulator sickness and presence, cognitive performance and spatial knowledge, a positive correlation between presence and spatial knowledge, a mitigating influence of experience with 3D applications and previous CAVE exposure on simulator sickness, and a higher incidence of simulator sickness in women.
@ARTICLE{freitag2016a,
author={S. Freitag and B. Weyers and T. W. Kuhlen},
journal={IEEE Transactions on Visualization and Computer Graphics},
title={{Examining Rotation Gain in CAVE-like Virtual Environments}},
year={2016},
volume={22},
number={4},
pages={1462-1471},
doi={10.1109/TVCG.2016.2518298},
ISSN={1077-2626},
month={April},
}
Design and Evaluation of Data Annotation Workflows for CAVE-like Virtual Environments

Data annotation finds increasing use in Virtual Reality applications with the goal to support the data analysis process, such as architectural reviews. In this context, a variety of different annotation systems for application to immersive virtual environments have been presented. While many interesting interaction designs for the data annotation workflow have emerged from them, important details and evaluations are often omitted. In particular, we observe that the process of handling metadata to interactively create and manage complex annotations is often not covered in detail. In this paper, we strive to improve this situation by focusing on the design of data annotation workflows and their evaluation. We propose a workflow design that facilitates the most important annotation operations, i.e., annotation creation, review, and modification. Our workflow design is easily extensible in terms of supported annotation and metadata types as well as interaction techniques, which makes it suitable for a variety of application scenarios. To evaluate it, we have conducted a user study in a CAVE-like virtual environment in which we compared our design to two alternatives in terms of a realistic annotation creation task. Our design obtained good results in terms of task performance and user experience.
Towards the Ultimate Display for Neuroscientific Data Analysis

This article wants to give some impulses for a discussion about how an “ultimate” display should look like to support the Neuroscience community in an optimal way. In particular, we will have a look at immersive display technology. Since its hype in the early 90’s, immersive Virtual Reality has undoubtedly been adopted as a useful tool in a variety of application domains and has indeed proven its potential to support the process of scientific data analysis. Yet, it is still an open question whether or not such non-standard displays make sense in the context of neuroscientific data analysis. We argue that the potential of immersive displays is neither about the raw pixel count only, nor about other hardware-centric characteristics. Instead, we advocate the design of intuitive and powerful user interfaces for a direct interaction with the data, which support the multi-view paradigm in an efficient and flexible way, and – finally – provide interactive response times even for huge amounts of data and when dealing multiple datasets simultaneously.
@InBook{Kuhlen2016,
Title = {Towards the Ultimate Display for Neuroscientific Data Analysis},
Author = {Kuhlen, Torsten Wolfgang and Hentschel, Bernd},
Editor = {Amunts, Katrin and Grandinetti, Lucio and Lippert, Thomas and Petkov, Nicolai},
Pages = {157--168},
Publisher = {Springer International Publishing},
Year = {2016},
Address = {Cham},
Booktitle = {Brain-Inspired Computing: Second International Workshop, BrainComp 2015, Cetraro, Italy, July 6-10, 2015, Revised Selected Papers},
Doi = {10.1007/978-3-319-50862-7_12},
ISBN = {978-3-319-50862-7},
Url = {http://dx.doi.org/10.1007/978-3-319-50862-7_12}
}
Human Factors in Information Visualization and Decision Support Systems
With the increase in data availability and data volume it becomes increasingly important to extract information and actionable knowledge from data. Information Visualization helps the user to understand data by utilizing vision as a relatively parallel input channel to the user’s mind. Decision Support systems on the other hand help users in making information actionable, by suggesting beneficial decisions and presenting them in context. Both fields share a common need for understanding the interface between the computer and the human. This makes human factors research critical for both fields. Understanding limitations of human perception, cognition and action, as well as their variance must be understood to fully leverage information visualization and decision support. This article reflects on research agendas for investigating human factors in the aforementioned fields.
@inproceedings{Valdez2016,
author = {Valdez, André Calero AND Brauner, Philipp AND Ziefle, Martina AND Kuhlen, Torsten Wolfgang AND Sedlmair, Michael},
title = {Human Factors in Information Visualization and Decision Support Systems},
booktitle = {Mensch und Computer 2016 – Workshopband},
year = {2016},
editor = {Weyers, Benjamin AND Dittmar, Anke},
pages = {},
publisher = {Gesellschaft für Informatik e.V.},
address = {Aachen}
}
City Reconstruction and Visualization from Public Data Sources

We present a city reconstruction and visualization framework that integrates geometric models reconstructed with a range of different techniques. The framework generates the vast majority of buildings procedurally, which yields plausible visualizations for structurally simple buildings, e.g. residential buildings. For structurally complex landmarks, e.g. churches, a procedural approach does not achieve satisfactory visual fidelity. Thus, we also employ image-based techniques to reconstruct the latter in a more realistic, recognizable way. As the manual acquisition of data required for the procedural and image-based reconstructions is practically infeasible for whole cities, we rely on publicly available data as well as crowd sourcing projects. This enables our framework to render views from cities without any dedicated data acquisition as long as there are sufficient public data sources available. To obtain a more lively impression of a city, we also visualize dynamic features like weather conditions and traffic based on publicly available real-time data.
Geodesic Iso-Curve Signature
During the last decade a set of surface descriptors have been presented describing local surface features. Recent approaches have shown that augmenting local descriptors with topological information improves the correspondence and segmentation quality. In this paper we build upon the work of Tevs et al. and Sun and Abidi by presenting a surface descriptor which captures both local surface properties and topological features of 3D objects. We present experiments on shape repositories that are provided with ground-truth correspondences (FAUST, SCAPE, TOSCA) which show that this descriptor outperforms current local surface descriptors.
@INPROCEEDINGS{gbk2016,
author = {Gehre, Anne and Bommes, David and Kobbelt, Leif}
title = {Geodesic Iso-Curve Signature},
booktitle = {Vision, Modeling {\&} Visualization},
year = {2016},
publisher = {The Eurographics Association}
}
Deferred Warping

We introduce deferred warping, a novel approach for real-time deformation of 3D objects attached to an animated or manipulated surface. Our target application is virtual prototyping of garments where 2D pattern modeling is combined with 3D garment simulation which allows an immediate validation of the design. The technique works in two steps: First, the surface deformation of the target object is determined and the resulting transformation field is stored as a matrix texture. Then the matrix texture is used as look-up table to transform a given geometry onto a deformed surface. Splitting the process in two steps yields a large flexibility since different attachment types can be realized by simply defining specific mapping functions. Our technique can directly handle complex topology changes within the surface. We demonstrate a fast implementation in the vertex shading stage allowing the use of highly decorated surfaces with millions of triangles in real-time.
@ARTICLE{Knuth2016,
author={Martin Knuth and Jan Bender and Michael Goesele and Arjan Kuijper},
journal={IEEE Computer Graphics and Applications},
title={Deferred Warping},
year={2016},
doi={10.1109/MCG.2016.41},
ISSN={0272-1716}
}
Towards Multi-user Provenance Tracking of Visual Analysis Workflows over Multiple Applications
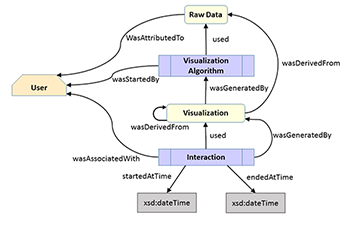
Provenance tracking for visual analysis workflows is still a challenge as especially interaction and collaboration aspects are poorly covered in existing realizations. Therefore, we propose a first prototype addressing these issues based on the PROV model. Interactions in multiple applications by multiple users can be tracked by means of a web interface and, thus, allowing even for tracking of remote-located collaboration partners. In the end, we demonstrate the applicability based on two use cases and discuss some open issues not addressed by our implementation so far but that can be easily integrated into our architecture.
@inproceedings {eurorv3.20161112,
booktitle = {EuroVis Workshop on Reproducibility, Verification, and Validation in Visualization (EuroRV3)},
editor = {Kai Lawonn and Mario Hlawitschka and Paul Rosenthal},
title = {{Towards Multi-user Provenance Tracking of Visual Analysis Workflows over Multiple Applications}},
author = { H{\"{a}}nel, Claudia and Khatami, Mohammad and Kuhlen, Torsten W. and Weyers, Benjamin},
year = {2016},
publisher = {The Eurographics Association},
ISSN = {-},
ISBN = {978-3-03868-017-8},
DOI = {10.2312/eurorv3.20161112}
}
A Lightweight Electrotactile Feedback Device to Improve Grasping in Immersive Virtual Environments
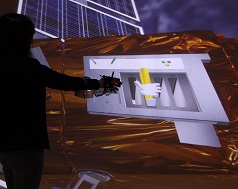
An immersive virtual environment is the ideal platform for the planning and training of on-orbit servicing missions. In such kind of virtual assembly simulation, grasping virtual objects is one of the most common and natural interactions. In this paper, we present a novel, small and lightweight electrotactile feedback device, specifically designed for immersive virtual environments. We conducted a study to assess the feasibility and usability of our interaction device. Results show that electrotactile feedback improved the user’s grasping in our virtual on-orbit servicing scenario. The task completion time was significantly lower and the precision of the user’s interaction was higher.
Collision Avoidance in the Presence of a Virtual Agent in Small-Scale Virtual Environments

Computer-controlled, human-like virtual agents (VAs), are often embedded into immersive virtual environments (IVEs) in order to enliven a scene or to assist users. Certain constraints need to be fulfilled, e.g., a collision avoidance strategy allowing users to maintain their personal space. Violating this flexible protective zone causes discomfort in real-world situations and in IVEs. However, no studies on collision avoidance for small-scale IVEs have been conducted yet.
Our goal is to close this gap by presenting the results of a controlled user study in a CAVE. 27 participants were immersed in a small-scale office with the task of reaching the office door. Their way was blocked either by a male or female VA, representing their co-worker. The VA showed different behavioral patterns regarding gaze and locomotion.
Our results indicate that participants preferred collaborative collision avoidance: they expect the VA to step aside in order to get more space to pass while being willing to adapt their own walking paths.
Honorable Mention for Best Technote!
@InProceedings{Boensch2016a,
Title = {Collision Avoidance in the Presence of a Virtual Agent in Small-Scale Virtual Environments},
Author = {Andrea B\"{o}nsch and Benjamin Weyers and Jonathan Wendt and Sebastian Freitag and Torsten W. Kuhlen},
Booktitle = {IEEE Symposium on 3D User Interfaces},
Year = {2016},
Pages = {145-148},
Abstract = {Computer-controlled, human-like virtual agents (VAs), are often embedded into immersive virtual environments (IVEs) in order to enliven a scene or to assist users. Certain constraints need to be fulfilled, e.g., a collision avoidance strategy allowing users to maintain
their personal space. Violating this flexible protective zone causes discomfort in real-world situations and in IVEs. However, no studies on collision avoidance for small-scale IVEs have been conducted yet. Our goal is to close this gap by presenting the results of a controlled
user study in a CAVE. 27 participants were immersed in a small-scale office with the task of reaching the office door. Theirwaywas blocked either by a male or female VA, representing their co-worker. The VA showed different behavioral patterns regarding gaze and locomotion.
Our results indicate that participants preferred collaborative collision avoidance: they expect the VA to step aside in order to get more space to pass while being willing to adapt their own walking paths.}
}
Automatic Speed Adjustment for Travel through Immersive Virtual Environments based on Viewpoint Quality
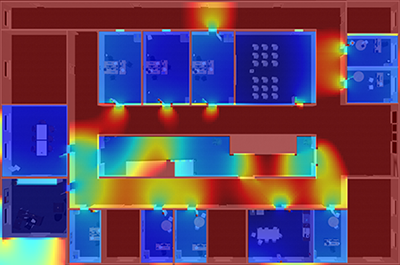
When traveling virtually through large scenes, long distances and different detail densities render fixed movement speeds impractical. However, to manually adjust the travel speed, users have to control an additional parameter, which may be uncomfortable and requires cognitive effort. Although automatic speed adjustment techniques exist, many of them can be problematic in indoor scenes. Therefore, we propose to automatically adjust travel speed based on viewpoint quality, originally a measure of the informativeness of a viewpoint. In a user study, we show that our technique is easy to use, allowing users to reach targets faster and use less cognitive resources than when choosing their speed manually.
Best Technote!
@INPROCEEDINGS{freitag2016b,
author={S. Freitag and B. Weyers and T. W. Kuhlen},
booktitle={2016 IEEE Symposium on 3D User Interfaces (3DUI)},
title={{Automatic Speed Adjustment for Travel through Immersive Virtual Environments based on Viewpoint Quality}},
year={2016},
pages={67-70},
doi={10.1109/3DUI.2016.7460033},
month={March},
}
SWIFTER: Design and Evaluation of a Speech-based Text Input Metaphor for Immersive Virtual Environments
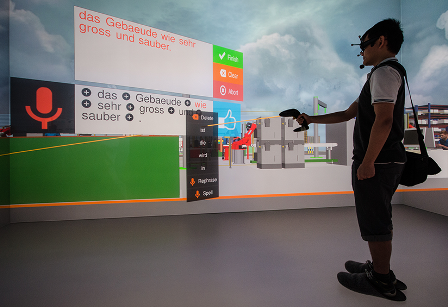
Text input is an important part of the data annotation process, where text is used to capture ideas and comments. For text entry in immersive virtual environments, for which standard keyboards usually do not work, various approaches have been proposed. While these solutions have mostly proven effective, there still remain certain shortcomings making further investigations worthwhile. Motivated by recent research, we propose the speech-based multimodal text entry system SWIFTER, which strives for simplicity while maintaining good performance. In an initial user study, we compared our approach to smartphone-based text entry within a CAVE-like virtual environment. Results indicate that SWIFTER reaches an average input rate of 23.6 words per minute and is positively received by users in terms of user experience.
Evaluation of Hands-Free HMD-Based Navigation Techniques for Immersive Data Analysis
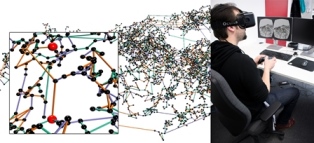
To use the full potential of immersive data analysis when wearing a head-mounted display, users have to be able to navigate through the spatial data. We collected, developed and evaluated 5 different hands-free navigation methods that are usable while seated in the analyst’s usual workplace. All methods meet the requirements of being easy to learn and inexpensive to integrate into existing workplaces. We conducted a user study with 23 participants which showed that a body leaning metaphor and an accelerometer pedal metaphor performed best. In the given task the participants had to determine the shortest path between various pairs of vertices in a large 3D graph.
Interactive Simulation of Aircraft Noise in Aural and Visual Virtual Environments
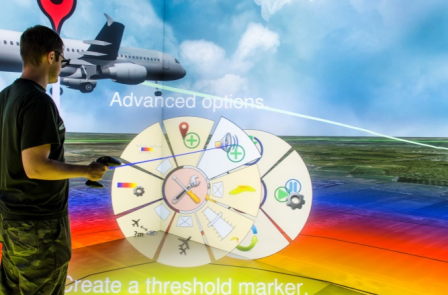
This paper describes a novel aircraft noise simulation technique developed at RWTH Aachen University, which makes use of aircraft noise auralization and 3D visualization to make aircraft noise both heard and seen in immersive Virtual Reality (VR) environments. This technique is intended to be used to increase the residents’ acceptance of aircraft noise by presenting noise changes in a more directly relatable form, and also aid in understanding what contributes to the residents’ subjective annoyance via psychoacoustic surveys. This paper describes the technique as well as some of its initial applications. The reasoning behind the development of such a technique is that the issue of aircraft noise experienced by residents in airport vicinities is one of subjective annoyance. Any efforts at noise abatement have been conventionally presented to residents in terms of noise level reductions in conventional metrics such as A-weighted level or equivalent sound level Leq. This conventional approach however proves insufficient in increasing aircraft noise acceptance due to two main reasons – firstly, the residents have only a rudimentary understanding of changes in decibel and secondly, the conventional metrics do not fully capture what the residents actually find annoying i.e. characteristics of aircraft noise they find least acceptable. In order to allow least resistance to air-traffic expansion, the acceptance of aircraft noise has to be increased, for which such a new approach to noise assessment is required.
Vista Widgets: A Framework for Designing 3D User Interfaces from Reusable Interaction Building Blocks
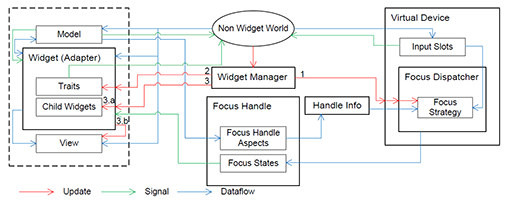
Virtual Reality (VR) has been an active field of research for several decades, with 3D interaction and 3D User Interfaces (UIs) as important sub-disciplines. However, the development of 3D interaction techniques and in particular combining several of them to construct complex and usable 3D UIs remains challenging, especially in a VR context. In addition, there is currently only limited reusable software for implementing such techniques in comparison to traditional 2D UIs. To overcome this issue, we present ViSTA Widgets, a software framework for creating 3D UIs for immersive virtual environments. It extends the ViSTA VR framework by providing functionality to create multi-device, multi-focus-strategy interaction building blocks and means to easily combine them into complex 3D UIs. This is realized by introducing a device abstraction layer along sophisticated focus management and functionality to create novel 3D interaction techniques and 3D widgets. We present the framework and illustrate its effectiveness with code and application examples accompanied by performance evaluations.
@InProceedings{Gebhardt2016,
Title = {{Vista Widgets: A Framework for Designing 3D User Interfaces from Reusable Interaction Building Blocks}},
Author = {Gebhardt, Sascha and Petersen-Krau, Till and Pick, Sebastian and Rausch, Dominik and Nowke, Christian and Knott, Thomas and Schmitz, Patric and Zielasko, Daniel and Hentschel, Bernd and Kuhlen, Torsten W.},
Booktitle = {Proceedings of the 22nd ACM Conference on Virtual Reality Software and Technology},
Year = {2016},
Address = {New York, NY, USA},
Pages = {251--260},
Publisher = {ACM},
Series = {VRST '16},
Acmid = {2993382},
Doi = {10.1145/2993369.2993382},
ISBN = {978-1-4503-4491-3},
Keywords = {3D interaction, 3D user interfaces, framework, multi-device, virtual reality},
Location = {Munich, Germany},
Numpages = {10},
Url = {http://doi.acm.org/10.1145/2993369.2993382}
}
Projective Fluids

We present a new method for particle based fluid simulation, using a combination of Projective Dynamics and Smoothed Particle Hydrodynamics (SPH). The Projective Dynamics framework allows the fast simulation of a wide range of constraints. It offers great stability through its implicit time integration scheme and is parallelizable in large parts, so that it can make use of modern multi core CPUs. Yet existing work only uses Projective Dynamics to simulate various kinds of soft bodies and cloth. We are the first ones to incorporate fluid simulation into the Projective Dynamics framework. Our proposed fluid constraints are derived from SPH and seamlessly integrate into the existing method. Furthermore, we adapt the solver to handle the constantly changing constraints that appear in fluid simulation. We employ a highly parallel matrix-free conjugate gradient solver, and thus do not require expensive matrix factorizations.
@inproceedings{Weiler2016,
author = {Marcel Weiler and Dan Koschier and Jan Bender},
title = {Projective Fluids},
booktitle = {Proceedings of ACM SIGGRAPH Conference on Motion in Games},
series = {MIG '16},
year = {2016},
publisher = {ACM}
}
A Robust Method to Extract the Rotational Part of Deformations
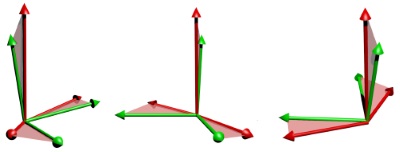
We present a novel algorithm to extract the rotational part of an arbitrary 3x3 matrix. This problem lies at the core of two popular simulation methods in computer graphics, the co-rotational Finite Element Method and Shape Matching techniques. In contrast to the traditional method based on polar decomposition, degenerate configurations and inversions are handled robustly and do not have to be treated in a special way. In addition, our method can be implemented with only a few lines of code without branches which makes it particularly well suited for GPU-based applications. We demonstrate the robustness, coherence and efficiency of our method by comparing it to stabilized polar decomposition in several simulation scenarios.
@inproceedings{Mueller2016,
author = {Matthias M\"{u}ller and Jan Bender and Nuttapong Chentanez and Miles Macklin},
title = {A Robust Method to Extract the Rotational Part of Deformations},
booktitle = {Proceedings of ACM SIGGRAPH Conference on Motion in Games},
series = {MIG '16},
year = {2016},
publisher = {ACM}
}
Experiences on Validation of Multi-Component System Simulations for Medical Training Applications
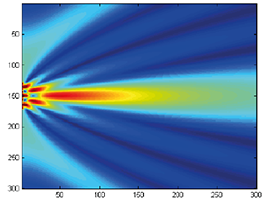
In the simulation of multi-component systems, we often encounter a problem with a lack of ground-truth data. This situation makes the validation of our simulation methods and models a difficult task. In this work we present a guideline to design validation methodologies that can be applied to the validation of multi-component simulations that lack of ground-truth data. Additionally we present an example applied to an Ultrasound Image Simulation for medical training and give an overview of the considerations made and the results for each of the validation methods. With these guidelines we expect to obtain more comparable and reproducible validation results from which other similar work can benefit.
@InProceedings{eurorv3.20161113,
author = {Law, Yuen C. and Weyers, Benjamin and Kuhlen, Torsten W.},
title = {{Experiences on Validation of Multi-Component System Simulations for Medical Training Applications}},
booktitle = {EuroVis Workshop on Reproducibility, Verification, and Validation in Visualization (EuroRV3)},
year = {2016},
editor = {Kai Lawonn and Mario Hlawitschka and Paul Rosenthal},
publisher = {The Eurographics Association},
doi = {10.2312/eurorv3.20161113},
isbn = {978-3-03868-017-8},
pages = {29--33}
}
The STRANDS Project: Long-Term Autonomy in Everyday Environments

Thanks to the efforts of our community, autonomous robots are becoming capable of ever more complex and impressive feats. There is also an increasing demand for, perhaps even an expectation of, autonomous capabilities from end-users. However, much research into autonomous robots rarely makes it past the stage of a demonstration or experimental system in a controlled environment. If we don't confront the challenges presented by the complexity and dynamics of real end-user environments, we run the risk of our research becoming irrelevant or ignored by the industries who will ultimately drive its uptake. In the STRANDS project we are tackling this challenge head-on. We are creating novel autonomous systems, integrating state-of-the-art research in artificial intelligence and robotics into robust mobile service robots, and deploying these systems for long-term installations in security and care environments. To date, over four deployments, our robots have been operational for a combined duration of 2545 hours (or a little over 106 days), covering 116km while autonomously performing end-user defined tasks. In this article we present an overview of the motivation and approach of the STRANDS project, describe the technology we use to enable long, robust autonomous runs in challenging environments, and describe how our robots are able to use these long runs to improve their own performance through various forms of learning.
Visualizing Performance Data With Respect to the Simulated Geometry
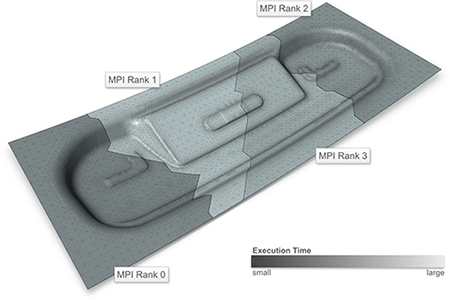
Understanding the performance behaviour of high-performance computing (hpc) applications based on performance profiles is a challenging task. Phenomena in the performance behaviour can stem from the hpc system itself, from the application’s code, but also from the simulation domain. In order to analyse the latter phenomena, we propose a system that visualizes profile-based performance data in its spatial context in the simulation domain, i.e., on the geometry processed by the application. It thus helps hpc experts and simulation experts understand the performance data better. Furthermore, it reduces the initially large search space by automatically labeling those parts of the data that reveal variation in performance and thus require detailed analysis.
@inproceedings{VIERJAHN-2016-02,
Author = {Vierjahn, Tom and Kuhlen, Torsten W. and M\"{u}ller, Matthias S. and Hentschel, Bernd},
Booktitle = {JARA-HPC Symposium (accepted for publication)},
Title = {Visualizing Performance Data With Respect to the Simulated Geometry},
Year = {2016}}
Using Directed Variance to Identify Meaningful Views in Call-Path Performance Profiles
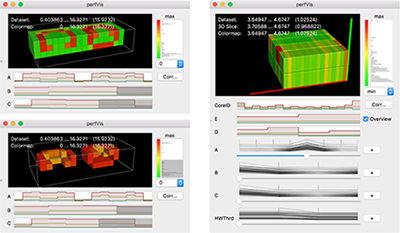
Understanding the performance behaviour of massively parallel high-performance computing (HPC) applications based on call-path performance profiles is a time-consuming task. In this paper, we introduce the concept of directed variance in order to help analysts find performance bottlenecks in massive performance data and in the end optimize the application. According to HPC experts’ requirements, our technique automatically detects severe parts in the data that expose large variation in an application’s performance behaviour across system resources. Previously known variations are effectively filtered out. Analysts are thus guided through a reduced search space towards regions of interest for detailed examination in a 3D visualization. We demonstrate the effectiveness of our approach using performance data of common benchmark codes as well as from actively developed production codes.
@inproceedings{VIERJAHN-2016-04,
Author = {Vierjahn, Tom and Hermanns, Marc-Andr\'{e} and Mohr, Bernd and M\"{u}ller, Matthias S. and Kuhlen, Torsten W. and Hentschel, Bernd},
Booktitle = {3rd Workshop Visual Performance Analysis (to appear)},
Title = {Using Directed Variance to Identify Meaningful Views in Call-Path Performance Profiles},
Year = {2016}}
Poster: Correlating Sub-Phenomena in Performance Data in the Frequency Domain
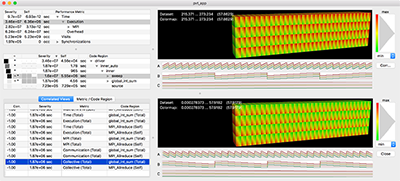
Finding and understanding correlated performance behaviour of the individual functions of massively parallel high-performance computing (HPC) applications is a time-consuming task. In this poster, we propose filtered correlation analysis for automatically locating interdependencies in call-path performance profiles. Transforming the data into the frequency domain splits a performance phenomenon into sub-phenomena to be correlated separately. We provide the mathematical framework and an overview over the visualization, and we demonstrate the effectiveness of our technique.
Best Poster Award!
@inproceedings{Vierjahn-2016-03,
Author = {Vierjahn, Tom and Hermanns, Marc-Andr\'{e} and Mohr, Bernd and M\"{u}ller, Matthias S. and Kuhlen, Torsten W. and Hentschel, Bernd},
Booktitle = {LDAV 2016 -- Posters (accepted)},
Date-Added = {2016-08-31 22:14:47 +0000},
Date-Modified = {2016-08-31 22:15:58 +0000},
Title = {Correlating Sub-Phenomena in Performance Data in the Frequency Domain}
}
Poster: Evaluating Presence Strategies of Temporarily Required Virtual Assistants

Computer-controlled virtual humans can serve as assistants in virtual scenes. Here, they are usually in an almost constant contact with the user. Nonetheless, in some applications assistants are required only temporarily. Consequently, presenting them only when needed, i.e, minimizing their presence time, might be advisable.
To the best of our knowledge, there do not yet exist any design guidelines for such agent-based support systems. Thus, we plan to close this gap by a controlled qualitative and quantitative user study in a CAVE-like environment.We expect users to prefer assistants with a low presence time as well as a low fallback time to get quick support. However, as both factors are linked, a suitable trade-off needs to be found. Thus, we plan to test four different strategies, namely fading, moving, omnipresent and busy. This work presents our hypotheses and our planned within-subject design.
@InBook{Boensch2016c,
Title = {Evaluating Presence Strategies of Temporarily Required Virtual Assistants},
Author = {Andrea B\"{o}nsch and Tom Vierjahn and Torsten W. Kuhlen},
Pages = {387 - 391},
Publisher = {Springer International Publishing},
Year = {2016},
Month = {September},
Abstract = {Computer-controlled virtual humans can serve as assistants in virtual scenes. Here, they are usually in an almost constant contact with the user. Nonetheless, in some applications assistants are required only
temporarily. Consequently, presenting them only when needed, i.e., minimizing their presence time, might be advisable.
To the best of our knowledge, there do not yet exist any design guidelines for such agent-based support systems. Thus, we plan to close this gap by a controlled qualitative and quantitative user study in a CAVE-like environment. We expect users to prefer assistants with a low presence time as well as a low fallback time to get quick support. However, as both factors are linked, a suitable trade-off needs to be found. Thus, we p lan to test four different strategies, namely fading, moving, omnipresent and busy. This work presents our hypotheses and our planned within-subject design.},
Booktitle = {Intelligent Virtual Agents: 16th International Conference, IVA 2016. Proceedings},
Doi = {10.1007/978-3-319-47665-0_39},
Keywords = {Virtual agent, Assistive technology, Immersive virtual environments, User study design},
Owner = {ab280112},
Timestamp = {2016.08.01},
Url = {http://dx.doi.org/10.1007/978-3-319-47665-0_39}
}
An Integrated Approach for the Knowledge Discovery in Computer Simulation Models with a Multi-dimensional Parameter Space
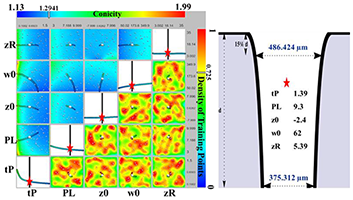
In production industries, parameter identification, sensitivity analysis and multi-dimensional visualization are vital steps in the planning process for achieving optimal designs and gaining valuable information. Sensitivity analysis and visualization can help in identifying the most-influential parameters and quantify their contribution to the model output, reduce the model complexity, and enhance the understanding of the model behavior. Typically, this requires a large number of simulations, which can be both very expensive and time consuming when the simulation models are numerically complex and the number of parameter inputs increases. There are three main constituent parts in this work. The first part is to substitute the numerical, physical model by an accurate surrogate model, the so-called metamodel. The second part includes a multi-dimensional visualization approach for the visual exploration of metamodels. In the third part, the metamodel is used to provide the two global sensitivity measures: i) the Elementary Effect for screening the parameters, and ii) the variance decomposition method for calculating the Sobol indices that quantify both the main and interaction effects. The application of the proposed approach is illustrated with an industrial application with the goal of optimizing a drilling process using a Gaussian laser beam.
@article{:/content/aip/proceeding/aipcp/10.1063/1.4952148,
author = "Khawli, Toufik Al and Gebhardt, Sascha and Eppelt, Urs and Hermanns, Torsten and Kuhlen, Torsten and Schulz, Wolfgang",
title = "An integrated approach for the knowledge discovery in computer simulation models with a multi-dimensional parameter space",
journal = "AIP Conference Proceedings",
year = "2016",
volume = "1738",
number = "1",
eid = 370003,
pages = "",
url = "http://scitation.aip.org/content/aip/proceeding/aipcp/10.1063/1.4952148;jsessionid=jy3FCznaGWpVQVNPYx765REW.x-aip-live-03",
doi = "http://dx.doi.org/10.1063/1.4952148"
}
Web-based Interactive and Visual Data Analysis for Ubiquitous Learning Analytics
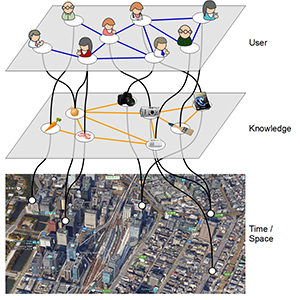
Interactive visual data analysis is a well-established class of methods to gather knowledge from raw and complex data. A broad variety of examples can be found in literature presenting its applicability in various ways and different scientific domains. However, fully fledged solutions for visual analysis addressing learning analytics are still rare. Therefore, this paper will discuss visual and interactive data analysis for learning analytics by presenting best practices followed by a discussion of a general architecture combining interactive visualization employing the Information Seeking Mantra in conjunction with the paradigm of coordinated multiple views. Finally, by presenting a use case for ubiquitous learning analytics its applicability will be demonstrated with the focus on temporal and spatial relation of learning data. The data is gathered from a ubiquitous learning scenario offering information for students to identify learning partners and provides information to teachers enabling the adaption of their learning material.
@InProceedings{weyers2016a,
Title = {Web-based Interactive and Visual Data Analysis for Ubiquitous Learning Analytics},
Author = {Benjamin Weyers, Christian Nowke, Torsten Wolfgang Kuhlen, Mouri Kousuke, Hiroaki Ogata},
Booktitle = {First International Workshop on Learning Analytics Across Physical and Digital Spaces co-located with 6th International Conference on Learning Analytics \& Knowledge (LAK 2016)},
Year = {2016},
Pages = {65--69},
Editor = {Roberto Martinez-Maldonado, Davinia Hernandez-Leo},
Volume = {1601},
Abstract = {Interactive visual data analysis is a well-established class of methods to gather knowledge from raw and complex data. A broad variety of examples can be found in literature presenting its applicability in various ways and different scientific domains. However, fully fledged solutions for visual analysis addressing learning analytics are still rare. Therefore, this paper will discuss visual and interactive data analysis for learning analytics by presenting best practices followed by a discussion of a general architecture combining interactive visualization employing the Information Seeking Mantra in conjunction with the paradigm of coordinated multiple views. Finally, by presenting a use case for ubiquitous learning analytics its applicability will be demonstrated with the focus on temporal and spatial relation of learning data. The data is gathered from a ubiquitous learning scenario offering information
for students to identify learning partners and provides information to teachers enabling the adaption of their learning material.},
Keywords = {interactive analysis, web-based visualization, learning analytics},
Url = {http://ceur-ws.org/Vol-1601/}
}
Semantic Segmentation of Modular Furniture

This paper proposes an approach for the semantic seg- mentation and structural parsing of modular furniture items, such as cabinets, wardrobes, and bookshelves, into so called interaction elements. Such a segmentation into functional units is challenging not only due to the visual similarity of the different elements but also because of their often uniformly colored and low-texture appearance. Our method addresses these challenges by merging structural and appearance likelihoods of each element and jointly op- timizing over shape, relative location, and class labels us- ing Markov Chain Monte Carlo (MCMC) sampling. We propose a novel concept called rectangle coverings which provides a tight bound on the number of structural elements and hence narrows down the search space. We evaluate our approach’s performance on a novel dataset of furniture items and demonstrate its applicability in practice.
@inproceedings{badamiWACV17,
title={Semantic Segmentation of Modular Furniture},
author={Pohlen, Tobias and Badami, Ishrat and Mathias, Markus and Leibe, Bastian},
booktitle={WACV},
year={2016}
}
Poster: Evaluation of Hands-Free HMD-Based Navigation Techniques for Immersive Data Analysis
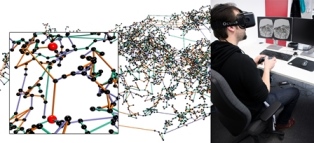
To use the full potential of immersive data analysis when wearing a head-mounted display, the user has to be able to navigate through the spatial data. We collected, developed and evaluated 5 different hands-free navigation methods that are usable while seated in the analyst’s usual workplace. All methods meet the requirements of being easy to learn and inexpensive to integrate into existing workplaces. We conducted a user study with 23 participants which showed that a body leaning metaphor and an accelerometer pedal metaphor performed best within the given task.
Poster: Automatic Generation of World in Miniatures for Realistic Architectural Immersive Virtual Environments

Orientation and wayfinding in architectural Immersive Virtual Environments (IVEs) are non-trivial, accompanying tasks which generally support the users’ main task. World in Miniatures (WIMs)— essentially 3D maps containing a scene replica—are an established approach to gain survey knowledge about the virtual world, as well as information about the user’s relation to it. However, for largescale, information-rich scenes, scaling and occlusion issues result in diminishing returns. Since there typically is a lack of standardized information regarding scene decompositions, presenting the inside of self-contained scene extracts is challenging.
Therefore, we present an automatic WIM generation workflow for arbitrary, realistic in- and outdoor IVEs in order to support users with meaningfully selected and scaled extracts of the IVE as well as corresponding context information. Additionally, a 3D user interface is provided to manually manipulate the represented extract.
@InProceedings{Boensch2016b,
Title = {Automatic Generation of World in Miniatures for Realistic Architectural Immersive Virtual Environments},
Author = {Andrea B\"{o}nsch and Sebastian Freitag and Torsten W. Kuhlen},
Booktitle = {IEEE Virtual Reality Conference Poster Proceedings},
Year = {2016},
Pages = {155-156},
Abstract = {Orientation and wayfinding in architectural Immersive Virtual Environments (IVEs) are non-trivial, accompanying tasks which generally support the users’ main task. World in Miniatures (WIMs)—essentially 3D maps containing a scene replica—are an established approach to gain survey knowledge about the virtual world, as well as information about the user’s relation to it. However, for largescale, information-rich scenes, scaling and occlusion issues result in diminishing returns. Since there typically is a lack of standardized information regarding scene decompositions, presenting the inside of self-contained scene extracts is challenging.
Therefore, we present an automatic WIM generation workflow for arbitrary, realistic in- and outdoor IVEs in order to support users with meaningfully selected and scaled extracts of the IVE as well as corresponding context information. Additionally, a 3D user interface is provided to manually manipulate the represented extract.}
}
Poster: Formal Evaluation Strategies for Feature Tracking
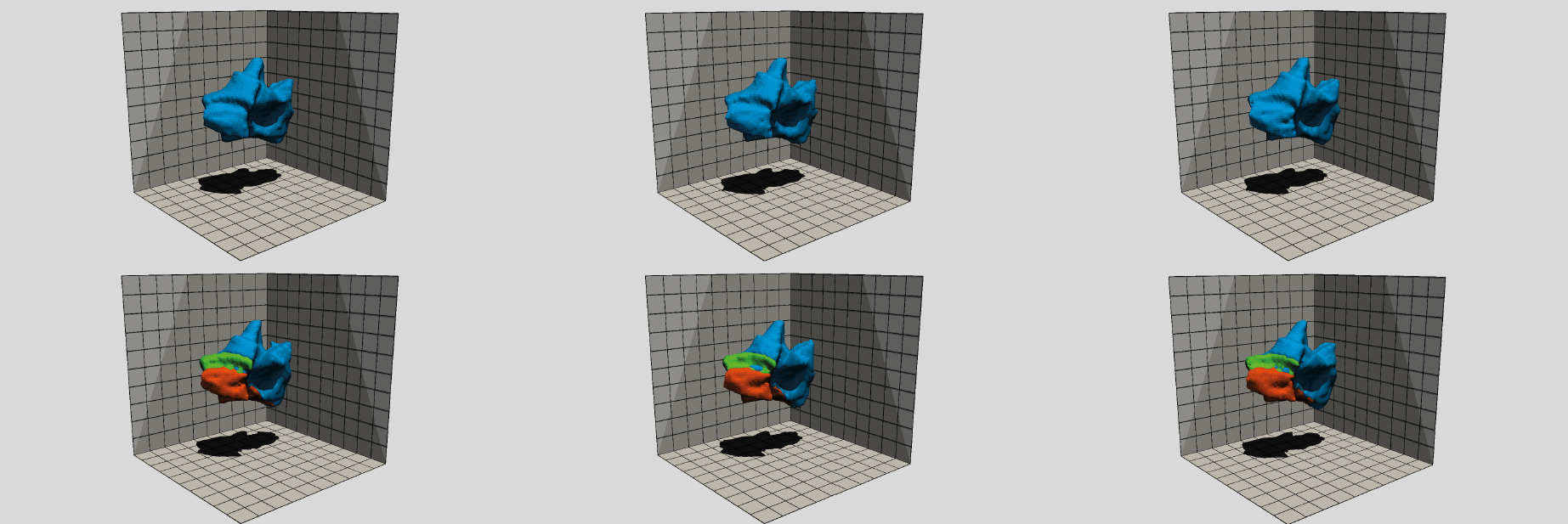
We present an approach for tracking space-filling features based on a two-step algorithm utilizing two graph optimization techniques. First, one-to-one assignments between successive time steps are found by a matching on a weighted, bi-partite graph. Second, events are detected by computing an independent set on potential event explanations. The main objective of this work is investigating options for formal evaluation of complex feature tracking algorithms in the absence of ground truth data.
@INPROCEEDINGS{Schnorr2016, author = {Andrea Schnorr and Sebastian Freitag and Dirk Helmrich and Torsten W. Kuhlen and Bernd Hentschel}, title = {{F}ormal {E}valuation {S}trategies for {F}eature {T}racking}, booktitle = Proc # { the } # LDAV, year = {2016}, pages = {103--104}, abstract = { We present an approach for tracking space-filling features based on a two-step algorithm utilizing two graph optimization techniques. First, one-to-one assignments between successive time steps are found by a matching on a weighted, bi-partite graph. Second, events are detected by computing an independent set on potential event explanations. The main objective of this work is investigating options for formal evaluation of complex feature tracking algorithms in the absence of ground truth data.
}, doi = { 10.1109/LDAV.2016.7874339}}
Poster: Geometry-Aware Visualization of Performance Data
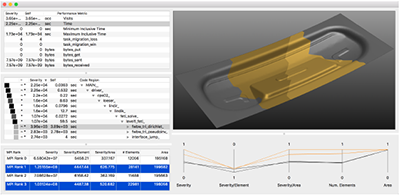
Phenomena in the performance behaviour of high-performance computing (HPC) applications can stem from the HPC system itself, from the application's code, but also from the simulation domain. In order to analyse the latter phenomena, we propose a system that visualizes profile-based performance data in its spatial context, i.e., on the geometry, in the simulation domain. It thus helps HPC experts but also simulation experts understand the performance data better. In addition, our tool reduces the initially large search space by automatically labelling large-variation views on the data which require detailed analysis.
@inproceedings {eurp.20161136,
booktitle = {EuroVis 2016 - Posters},
editor = {Tobias Isenberg and Filip Sadlo},
title = {{Geometry-Aware Visualization of Performance Data}},
author = {Vierjahn, Tom and Hentschel, Bernd and Kuhlen, Torsten W.},
year = {2016},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-015-4},
DOI = {10.2312/eurp.20161136},
pages = {37--39}
}
Poster: Tracking Space-Filling Features by Two-Step Optimization

We present a novel approach for tracking space-filling features, i.e., a set of features covering the entire domain. The assignment between successive time steps is determined by a two-step, global optimization scheme. First, a maximum-weight, maximal matching on a bi-partite graph is computed to provide one-to-one assignments between features of successive time steps. Second, events are detected in a subsequent step; here the matching step serves to restrict the exponentially large set of potential solutions. To this end, we compute an independent set on a graph representing conflicting event explanations. The method is evaluated by tracking dissipation elements, a structure definition from turbulent flow analysis.
Honorable Mention Award!
@inproceedings {eurp.20161146,
booktitle = {EuroVis 2016 - Posters},
editor = {Tobias Isenberg and Filip Sadlo},
title = {{Tracking Space-Filling Features by Two-Step Optimization}},
author = {Schnorr, Andrea and Freitag, Sebastian and Kuhlen, Torsten W. and Hentschel, Bernd},
year = {2016},
publisher = {The Eurographics Association},
pages = {77--79},
ISBN = {978-3-03868-015-4},
DOI = {10.2312/eurp.20161146}
}
Avatars as Peers at Work: An Experimental Study in Virtual Reality
Identification of peer effects is often complicated by the reflection problem: Does agent i influence agent j, or vice versa? To be able to identify a clear causality, we embed a virtual human (avatar) as co-worker of a human subject into an immersive virtual environment. We observe that low productive human subjects increase their work performance more when they observe a low productive avatar – compared to a high productive avatar. This result is in line with the predictions of the social comparison theory, in as much as we observe stronger peer effects when the perceived similarity in abilities between the peers is high.
@Article{Guererk2016,
Title = {Avatars as Peers at Work: An Experimental Study in Virtual Reality},
Author = {Ozgür Gürerk and Thomas Kittsteiner and Andrea Bönsch and Andreas Staffeldt},
Year = {2016},
DOI = {10.2139/ssrn.2842411},
Publisher = {SSRN}
}
Talk: Two Basic Aspects of Virtual Agents’ Behavior: Collision Avoidance and Presence Strategies
Virtual Agents (VAs) are embedded in virtual environments for two reasons: they enliven architectural scenes by representing more realistic situations, and they are dialogue partners. They can function as training partners such as representing students in a teaching scenario, or as assistants by, e.g., guiding users through a scene or by performing certain tasks either individually or in collaboration with the user. However, designing such VAs is challenging as various requirements have to be met. Two relevant factors will be briefly discussed in the talk: Collision Avoidance and Presence Strategies.
Experimental Economics in Virtual Reality

Experimental economics uses controlled and incentivized lab and field experiments to learn about economic behavior. By means of three examples, we illustrate how experiments conducted in immersive virtual environments emerge as a new methodological tool that can benefit behavioral economic research.
@TechReport{Gurerk2016,
Title = {{Experimental Economics in Virtual Reality},}
Author = {G{\"u}rerk, {\"O}zg{\"u}r and B{\"o}nsch, Andrea and Braun, Lucas and Grund, Christian and Harbring, Christine and Kittsteiner, Thomas and Staffeldt, Andreas},
Institution = {{M}unich {P}ersonal {R}e{PE}c {A}rchive ({MPRA}), Paper No. 71409},
Year = {2016},
Number = {Paper No. 71409},
Url = {http://mpra.ub.uni-muenchen.de/71409/}
}
Superpixels: An Evaluation of the State-of-the-Art
Superpixels group perceptually similar pixels to create visually meaningful entities while heavily reducing the number of primitives. As of these properties, superpixel algorithms have received much attention since their naming in 2003. By today, publicly available and well-understood superpixel algorithms have turned into standard tools in low-level vision. As such, and due to their quick adoption in a wide range of applications, appropriate benchmarks are crucial for algorithm selection and comparison. Until now, the rapidly growing number of algorithms as well as varying experimental setups hindered the development of a unifying benchmark. We present a comprehensive evaluation of 28 state-of-the-art superpixel algorithms utilizing a benchmark focussing on fair comparison and designed to provide new and relevant insights. To this end, we explicitly discuss parameter optimization and the importance of strictly enforcing connectivity. Furthermore, by extending well-known metrics, we are able to summarize algorithm performance independent of the number of generated superpixels, thereby overcoming a major limitation of available benchmarks. Furthermore, we discuss runtime, robustness against noise, blur and affine transformations, implementation details as well as aspects of visual quality. Finally, we present an overall ranking of superpixel algorithms which redefines the state-of-the-art and enables researchers to easily select appropriate algorithms and the corresponding implementations which themselves are made publicly available as part of our benchmark at davidstutz.de/projects/superpixel-benchmark/.
@article{Stutz2016Arxiv,
title = {{Superpixels: An Evaluation of the State-of-the-Art}},
author = {David Stutz and Alexander Hermans and Bastian Leibe},
journal = {arXiv preprint arXiv:1612.01601},
year = {2016}
}
An Efficient Convolutional Network for Human Pose Estimation
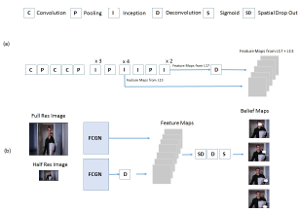
In recent years, human pose estimation has greatly benefited from deep learning and huge gains in performance have been achieved. The trend to maximise the accuracy on benchmarks, however, resulted in computationally expensive deep network architectures that require expensive hardware and pre-training on large datasets. This makes it difficult to compare different methods and to reproduce existing results. We therefore propose in this work an efficient deep network architecture that can be efficiently trained on mid-range GPUs without the need of any pre-training. Despite of the low computational requirements of our network, it is on par with much more complex models on popular benchmarks for human pose estimation.
On Multi-Modal People Tracking from Mobile Platforms in Very Crowded and Dynamic Environments

Tracking people is a key technology for robots and intelligent systems in human environments. Many person detectors, filtering methods and data association algorithms for people tracking have been proposed in the past 15+ years in both the robotics and computer vision communities, achieving decent tracking performances from static and mobile platforms in real-world scenarios. However, little effort has been made to compare these methods, analyze their performance using different sensory modalities and study their impact on different performance metrics. In this paper, we propose a fully integrated real-time multi-modal laser/RGB-D people tracking framework for moving platforms in environments like a busy airport terminal. We conduct experiments on two challenging new datasets collected from a first-person perspective, one of them containing very dense crowds of people with up to 30 individuals within close range at the same time. We consider four different, recently proposed tracking methods and study their impact on seven different performance metrics, in both single and multi-modal settings. We extensively discuss our findings, which indicate that more complex data association methods may not always be the better choice, and derive possible future research directions.
@incollection{linder16multi,
title={On Multi-Modal People Tracking from Mobile Platforms in Very Crowded and Dynamic Environments},
author={Linder, Timm and Breuers, Stefan and Leibe, Bastian and Arras, Kai Oliver},
booktitle={ICRA},
year={2016},
}
Exploring Bounding Box Context for Multi-Object Tracker Fusion
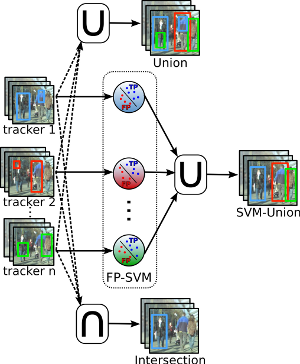
Many multi-object-tracking (MOT) techniques have been developed over the past years. The most successful ones are based on the classical tracking-by-detection approach. The different methods rely on different kinds of data association, use motion and appearance models, or add optimization terms for occlusion and exclusion. Still, errors occur for all those methods and a consistent evaluation has just started. In this paper we analyze three current state-of-the-art MOT trackers and show that there is still room for improvement. To that end, we train a classifier on the trackers' output bounding boxes in order to prune false positives. Furthermore, the different approaches have different strengths resulting in a reduced false negative rate when combined. We perform an extensive evaluation over ten common evaluation sequences and consistently show improved performances by exploiting the strengths and reducing the weaknesses of current methods.
@inproceedings{breuersWACV16,
title={Exploring Bounding Box Context for Multi-Object Tracker Fusion},
author={Breuers, Stefan and Yang, Shishan and Mathias, Markus and Leibe, Bastian},
booktitle={WACV},
year={2016}
}
Reduced-Order Shape Optimization Using Offset Surfaces
Proceedings of the 2015 SIGGRAPH Conference
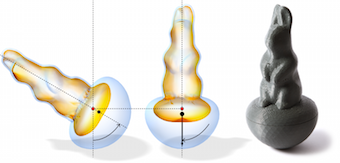
Given the 2-manifold surface of a 3d object, we propose a novel method for the computation of an offset surface with varying thickness such that the solid volume between the surface an its offset satisfies a set of prescribed constraints and at the same time minimizes a given objective functional. Since the constraints as well as the objective functional can easily be adjusted to specific application requirements, our method provides a flexible and powerful tool for shape optimization. We use manifold harmonics to derive a reduced-order formulation of the optimization problem which guarantees a smooth offset surface and speeds up the computation independently from the input mesh resolution without affecting the quality of the result. The constrained optimization problem can be solved in a numerically robust manner with commodity solvers. Furthermore, the method allows to simultaneously optimize an inner and an outer offset in order to increase the degrees of freedom. We demonstrate our method in a number of examples where we control the physical mass properties of rigid objects for the purpose of 3d printing.
@article{musialski-2015-souos,
title = "Reduced-Order Shape Optimization Using Offset Surfaces",
author = "Przemyslaw Musialski and Thomas Auzinger and Michael Birsak
and Michael Wimmer and Leif Kobbelt",
year = "2015",
abstract = "Given the 2-manifold surface of a 3d object, we propose a
novel method for the computation of an offset surface with
varying thickness such that the solid volume between the
surface an its offset satisfies a set of prescribed
constraints and at the same time minimizes a given objective
functional. Since the constraints as well as the objective
functional can easily be adjusted to specific application
requirements, our method provides a flexible and powerful
tool for shape optimization. We use manifold harmonics to
derive a reduced-order formulation of the optimization
problem which guarantees a smooth offset surface and speeds
up the computation independently from the input mesh
resolution without affecting the quality of the result. The
constrained optimization problem can be solved in a
numerically robust manner with commodity solvers.
Furthermore, the method allows to simultaneously optimize an
inner and an outer offset in order to increase the degrees
of freedom. We demonstrate our method in a number of
examples where we control the physical mass properties of
rigid objects for the purpose of 3d printing.",
pages = "to appear--9",
month = aug,
number = "4",
event = "ACM SIGGRAPH 2015",
journal = "ACM Transactions on Graphics (ACM SIGGRAPH 2015)",
volume = "34",
location = "Los Angeles, CA, USA",
keywords = "reduced-order models, shape optimization, computational
geometry, geometry processing, physical mass properties",
URL = "http://www.cg.tuwien.ac.at/research/publications/2015/musialski-2015-souos/",
}
BendFields: Regularized Curvature Fields from Rough Concept Sketches
Designers frequently draw curvature lines to convey bending of smooth surfaces in concept sketches. We present a method to extrapolate curvature lines in a rough concept sketch, recovering the intended 3D curvature field and surface normal at each pixel of the sketch. This 3D information allows to enrich the sketch with 3D-looking shading and texturing. We first introduce the concept of regularized curvature lines that model the lines designers draw over curved surfaces, encompassing curvature lines and their extension as geodesics over flat or umbilical regions. We build on this concept to define the orthogonal cross field that assigns two regularized curvature lines to each point of a 3D surface. Our algorithm first estimates the projection of this cross field in the drawing, which is nonorthogonal due to foreshortening. We formulate this estimation as a scattered interpolation of the strokes drawn in the sketch, which makes our method robust to sketchy lines that are typical for design sketches. Our interpolation relies on a novel smoothness energy that we derive from our definition of regularized curvature lines. Optimizing this energy subject to the stroke constraints produces a dense nonorthogonal 2D cross field which we then lift to 3D by imposing orthogonality. Thus, one central concept of our approach is the generalization of existing cross field algorithms to the nonorthogonal case. We demonstrate our algorithm on a variety of concept sketches with various levels of sketchiness. We also compare our approach with existing work that takes clean vector drawings as input.
@Article{IBB15,
author = "Iarussi, Emmanuel and Bommes, David and Bousseau, Adrien",
title = "BendFields: Regularized Curvature Fields from Rough Concept Sketches ",
journal = "ACM Transactions on Graphics",
year = "2015",
url = "http://www-sop.inria.fr/reves/Basilic/2015/IBB15"
}
Visual landmark recognition from Internet photo collections: A large-scale evaluation
In this paper, we present an object-centric, fixeddimensional 3D shape representation for robust matching of partially observed object shapes, which is an important component for object categorization from 3D data. A main problem when working with RGB-D data from stereo, Kinect, or laser sensors is that the 3D information is typically quite noisy. For that reason, we accumulate shape information over time and register it in a common reference frame. Matching the resulting shapes requires a strategy for dealing with partial observations. We therefore investigate several distance functions and kernels that implement different such strategies and compare their matching performance in quantitative experiments. We show that the resulting representation achieves good results for a large variety of vision tasks, such as multi-class classification, person orientation estimation, and articulated body pose estimation, where robust 3D shape matching is essential.
Quantized Global Parametrization
Global surface parametrization often requires the use of cuts or charts due to non-trivial topology. In recent years a focus has been on so-called seamless parametrizations, where the transition functions across the cuts are rigid transformations with a rotation about some multiple of 90 degrees. Of particular interest, e.g. for quadrilateral meshing, paneling, or texturing, are those instances where in addition the translational part of these transitions is integral (or more generally: quantized). We show that finding not even the optimal, but just an arbitrary valid quantization (one that does not imply parametric degeneracies), is a complex combinatorial problem. We present a novel method that allows us to solve it, i.e. to find valid as well as good quality quantizations. It is based on an original approach to quickly construct solutions to linear Diophantine equation systems, exploiting the specific geometric nature of the parametrization problem. We thereby largely outperform the state-of-the-art, sometimes by several orders of magnitude.
Real-Time Isosurface Extraction with View-Dependent Level of Detail and Applications
Volumetric scalar datasets are common in many scientific, engineering, and medical applications where they originate from measurements or simulations. Furthermore, they can represent geometric scene content, e.g. as distance or density fields. Often isosurfaces are extracted, either for indirect volume visualization in the former category, or to simply obtain a polygonal representation in case of the latter. However, even moderately sized volume datasets can result in complex isosurfaces which are challenging to recompute in real-time, e.g. when the user modifies the isovalue or when the data itself is dynamic. In this paper, we present a GPU-friendly algorithm for the extraction of isosurfaces, which provides adaptive level of detail rendering with view-dependent tessellation. It is based on a longest edge bisection scheme where the resulting tetrahedral cells are subdivided into four hexahedra, which then form the domain for the subsequent isosurface extraction step. Our algorithm generates meshes with good triangle quality even for highly nonlinear scalar data. In contrast to previous methods, it does not require any stitching between regions of different levels of detail. As all computation is performed at run-time and no preprocessing is required, the algorithm naturally supports dynamic data and allows us to change isovalues at any time.
@article{SBD2015,
title = {Real-Time Isosurface Extraction with View-Dependent Level of Detail and Applications},
author = {Manuel Scholz and Jan Bender and Carsten Dachsbacher},
year = {2015},
volume = {34},
pages = {103--115},
number = {1},
doi = {10.1111/cgf.12462},
issn = {1467-8659},
journal = {Computer Graphics Forum},
url = {http://dx.doi.org/10.1111/cgf.12462}
}
Position-Based Simulation Methods in Computer Graphics

The physically-based simulation of mechanical effects has been an important research topic in computer graphics for more than two decades. Classical methods in this field discretize Newton's second law and determine different forces to simulate various effects like stretching, shearing, and bending of deformable bodies or pressure and viscosity of fluids, to mention just a few. Given these forces, velocities and finally positions are determined by a numerical integration of the resulting accelerations.
In the last years position-based simulation methods have become popular in the graphics community. In contrast to classical simulation approaches these methods compute the position changes in each simulation step directly, based on the solution of a quasi-static problem. Therefore, position-based approaches are fast, stable and controllable which make them well-suited for use in interactive environments. However, these methods are generally not as accurate as force-based methods but still provide visual plausibility. Hence, the main application areas of position-based simulation are virtual reality, computer games and special effects in movies and commercials.
In this tutorial we first introduce the basic concept of position-based dynamics. Then we present different solvers and compare them with the classical implicit Euler method. We discuss approaches to improve the convergence of these solvers. Moreover, we show how position-based methods are applied to simulate hair, cloth, volumetric deformable bodies, rigid body systems and fluids. We also demonstrate how complex effects like anisotropy or plasticity can be simulated and introduce approaches to improve the performance. Finally, we give an outlook and discuss open problems.
@inproceedings{BMM2015,
title = "Position-Based Simulation Methods in Computer Graphics",
author = "Jan Bender and Matthias M{\"u}ller and Miles Macklin",
year = "2015",
booktitle = "EUROGRAPHICS 2015 Tutorials",
publisher = "Eurographics Association",
location = "Zurich, Switzerland"
}
Biternion Nets: Continuous Head Pose Regression from Discrete Training Labels

TL;DR: By doing the obvious thing of encoding an angle φ as (cos φ, sin φ), we can do cool things and simplify data labeling requirements.
While head pose estimation has been studied for some time, continuous head pose estimation is still an open problem. Most approaches either cannot deal with the periodicity of angular data or require very fine-grained regression labels. We introduce biternion nets, a CNN-based approach that can be trained on very coarse regression labels and still estimate fully continuous 360° head poses. We show state-of-the-art results on several publicly available datasets. Finally, we demonstrate how easy it is to record and annotate a new dataset with coarse orientation labels in order to obtain continuous head pose estimates using our biternion nets.
@inproceedings{Beyer2015BiternionNets,
author = {Lucas Beyer and Alexander Hermans and Bastian Leibe},
title = {Biternion Nets: Continuous Head Pose Regression from Discrete Training Labels},
booktitle = {Pattern Recognition},
publisher = {Springer},
series = {Lecture Notes in Computer Science},
volume = {9358},
pages = {157-168},
year = {2015},
isbn = {978-3-319-24946-9},
doi = {10.1007/978-3-319-24947-6_13},
ee = {http://lucasb.eyer.be/academic/biternions/biternions_gcpr15.pdf},
}
A Fixed-Dimensional 3D Shape Representation for Matching Partially Observed Objects in Street Scenes
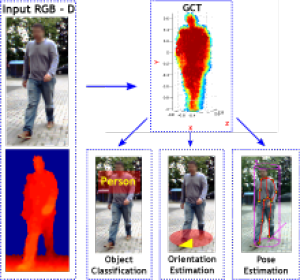
In this paper, we present an object-centric, fixeddimensional 3D shape representation for robust matching of partially observed object shapes, which is an important component for object categorization from 3D data. A main problem when working with RGB-D data from stereo, Kinect, or laser sensors is that the 3D information is typically quite noisy. For that reason, we accumulate shape information over time and register it in a common reference frame. Matching the resulting shapes requires a strategy for dealing with partial observations. We therefore investigate several distance functions and kernels that implement different such strategies and compare their matching performance in quantitative experiments. We show that the resulting representation achieves good results for a large variety of vision tasks, such as multi-class classification, person orientation estimation, and articulated body pose estimation, where robust 3D shape matching is essential.
Divergence-Free Smoothed Particle Hydrodynamics
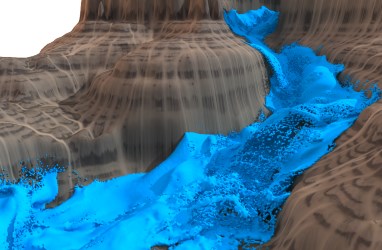
In this paper we introduce an efficient and stable implicit SPH method for the physically-based simulation of incompressible fluids. In the area of computer graphics the most efficient SPH approaches focus solely on the correction of the density error to prevent volume compression. However, the continuity equation for incompressible flow also demands a divergence-free velocity field which is neglected by most methods. Although a few methods consider velocity divergence, they are either slow or have a perceivable density fluctuation.
Our novel method uses an efficient combination of two pressure solvers which enforce low volume compression (below 0.01%) and a divergence-free velocity field. This can be seen as enforcing incompressibility both on position level and velocity level. The first part is essential for realistic physical behavior while the divergence-free state increases the stability significantly and reduces the number of solver iterations. Moreover, it allows larger time steps which yields a considerable performance gain since particle neighborhoods have to be updated less frequently. Therefore, our divergence-free SPH (DFSPH) approach is significantly faster and more stable than current state-of-the-art SPH methods for incompressible fluids. We demonstrate this in simulations with millions of fast moving particles.
@INPROCEEDINGS{Bender2015,
author = {Jan Bender and Dan Koschier},
title = {Divergence-Free Smoothed Particle Hydrodynamics},
booktitle = {Proceedings of the 2015 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2015},
publisher = {ACM},
doi = {http://dx.doi.org/10.1145/2786784.2786796}
}
Integrating Visualizations into Modeling NEST Simulations
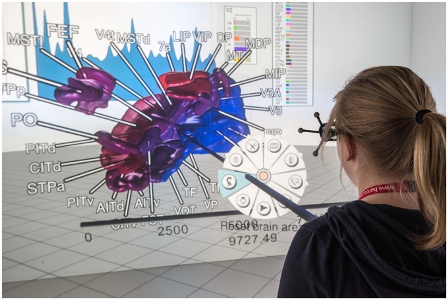
Modeling large-scale spiking neural networks showing realistic biological behavior in their dynamics is a complex and tedious task. Since these networks consist of millions of interconnected neurons, their simulation produces an immense amount of data. In recent years it has become possible to simulate even larger networks. However, solutions to assist researchers in understanding the simulation's complex emergent behavior by means of visualization are still lacking. While developing tools to partially fill this gap, we encountered the challenge to integrate these tools easily into the neuroscientists' daily workflow. To understand what makes this so challenging, we looked into the workflows of our collaborators and analyzed how they use the visualizations to solve their daily problems. We identified two major issues: first, the analysis process can rapidly change focus which requires to switch the visualization tool that assists in the current problem domain. Second, because of the heterogeneous data that results from simulations, researchers want to relate data to investigate these effectively. Since a monolithic application model, processing and visualizing all data modalities and reflecting all combinations of possible workflows in a holistic way, is most likely impossible to develop and to maintain, a software architecture that offers specialized visualization tools that run simultaneously and can be linked together to reflect the current workflow, is a more feasible approach. To this end, we have developed a software architecture that allows neuroscientists to integrate visualization tools more closely into the modeling tasks. In addition, it forms the basis for semantic linking of different visualizations to reflect the current workflow. In this paper, we present this architecture and substantiate the usefulness of our approach by common use cases we encountered in our collaborative work.
Multi-band Hough Forests for Detecting Humans with Reflective Safety Clothing from Mobile Machinery
We address the problem of human detection from heavy mobile machinery and robotic equipment operating at industrial working sites. Exploiting the fact that workers are typically obliged to wear high-visibility clothing with reflective markers, we propose a new recognition algorithm that specifically incorporates the highly discriminative features of the safety garments in the detection process. Termed Multi-band Hough Forest, our detector fuses the input from active near-infrared (NIR) and RGB color vision to learn a human appearance model that not only allows us to detect and localize industrial workers, but also to estimate their body orientation. We further propose an efficient pipeline for automated generation of training data with high-quality body part annotations that are used in training to increase detector performance. We report a thorough experimental evaluation on challenging image sequences from a real-world production environment, where persons appear in a variety of upright and non-upright body positions.
Fixing WTFs: Detecting Image Matches caused by Watermarks, Timestamps, and Frames in Internet Photos
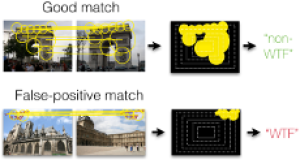
An increasing number of photos in Internet photo collections comes with watermarks, timestamps, or frames (in the following called WTFs) embedded in the image content. In image retrieval, such WTFs often cause false-positive matches. In image clustering, these false-positive matches can cause clusters of different buildings to be joined into one. This harms applications like landmark recognition or large-scale structure-from-motion, which rely on clean building clusters. We propose a simple, but highly effective detector for such false-positive matches. Given a matching image pair with an estimated homography, we first determine similar regions in both images. Exploiting the fact that WTFs typically appear near the border, we build a spatial histogram of the similar regions and apply a binary classifier to decide whether the match is due to a WTF. Based on a large-scale dataset of WTFs we collected from Internet photo collections, we show that our approach is general enough to recognize a large variety of watermarks, timestamps, and frames, and that it is efficient enough for largescale applications. In addition, we show that our method fixes the problems that WTFs cause in image clustering applications. The source code is publicly available and easy to integrate into existing retrieval and clustering systems.
Disentangling the Impact of Social Groups on Response Times and Movement Dynamics in Evacuations
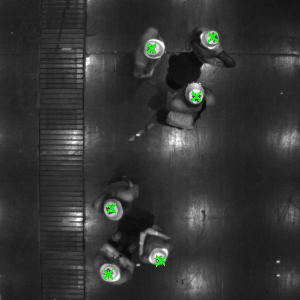
Crowd evacuations are paradigmatic examples for collective behaviour, as interactions between individuals lead to the overall movement dynamics. Approaches assuming that all individuals interact in the same way have significantly improved our understanding of pedestrian crowd evacuations. However, this scenario is unlikely, as many pedestrians move in social groups that are based on friendship or kinship. We test how the presence of social groups affects the egress time of individuals and crowds in a representative crowd evacuation experiment. Our results suggest that the presence of social groups increases egress times and that this is largely due to differences at two stages of evacuations. First, individuals in social groups take longer to show a movement response at the start of evacuations, and, second, they take longer to move into the vicinity of the exits once they have started to move towards them. Surprisingly, there are no discernible time differences between the movement of independent individuals and individuals in groups directly in front of the exits. We explain these results and discuss their implications. Our findings elucidate behavioural differences between independent individuals and social groups in evacuations. Such insights are crucial for the control of crowd evacuations and for planning mass events.
Data Driven 3D Face Tracking Based on a Facial Deformation Model
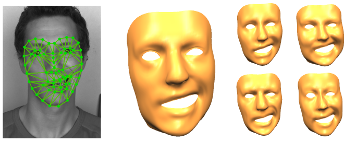
We introduce a new markerless 3D face tracking approach for 2D video streams captured by a single consumer grade camera. Our approach is based on tracking 2D features in the video and matching them with the projection of the corresponding feature points of a deformable 3D model. By this we estimate the initial shape and pose of the face. To make the tracking and reconstruction more robust we add a smoothness prior for pose changes as well as for deformations of the faces. Our major contribution lies in the formulation of the smooth deformation prior which we derive from a large database of previously captured facial animations showing different (dynamic) facial expressions of a fairly large number of subjects. We split these animation sequences into snippets of fixed length which we use to predict the facial motion based on previous frames. In order to keep the deformation model compact and independent from the individual physiognomy, we represent it by deformation gradients (instead of vertex positions) and apply a principal component analysis in deformation gradient space to extract the major modes of facial deformation. Since the facial deformation is optimized during tracking, it is particularly easy to apply them to other physiognomies and thereby re-target the facial expressions. We demonstrate the effectiveness of our technique on a number of examples.
VMV 2015 Honorable Mention
ACTUI: Using Commodity Mobile Devices to Build Active Tangible User Interfaces

We present the prototype design for a novel user interface, which extends the concept of tangible user interfaces from mostly specialized hardware components and studio deployment to commodity mobile devices in daily life. Our prototype enables mobile devices to be components of a tangible interface where each device can serve as both, a touch sensing display and as a tangible item for interaction. The only necessary modification is the attachment of a conductive 2D touch pattern on each device. Compared to existing approaches, our Active Commodity Tangible User Interfaces (ACTUI) can display graphical output directly on their built-in display paving the way to a plethora of innovative applications where the diverse combination of local and global active display area can significantly enhance the flexibility and effectiveness of the interaction. We explore two exemplary application scenarios where we demonstrate the potential of ACTUI.
Active Exploration of Large 3D Model Repositories
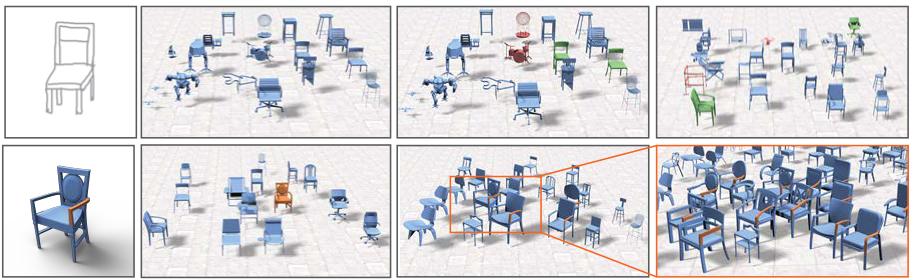
With broader availability of large-scale 3D model repositories, the need for efficient and effective exploration becomes more and more urgent. Existing model retrieval techniques do not scale well with the size of the database since often a large number of very similar objects are returned for a query, and the possibilities to refine the search are quite limited. We propose an interactive approach where the user feeds an active learning procedure by labeling either entire models or parts of them as “like” or “dislike” such that the system can automatically update an active set of recommended models. To provide an intuitive user interface, candidate models are presented based on their estimated relevance for the current query. From the methodological point of view, our main contribution is to exploit not only the similarity between a query and the database models but also the similarities among the database models themselves. We achieve this by an offline pre-processing stage, where global and local shape descriptors are computed for each model and a sparse distance metric is derived that can be evaluated efficiently even for very large databases. We demonstrate the effectiveness of our method by interactively exploring a repository containing over 100K models.
@ARTICLE{6951464,
author={L. {Gao} and Y. {Cao} and Y. {Lai} and H. {Huang} and L. {Kobbelt} and S. {Hu}},
journal={IEEE Transactions on Visualization and Computer Graphics},
title={Active Exploration of Large 3D Model Repositories},
year={2015},
volume={21},
number={12},
pages={1390-1402},}
Level-of-Detail Modal Analysis for Real-time Sound Synthesis
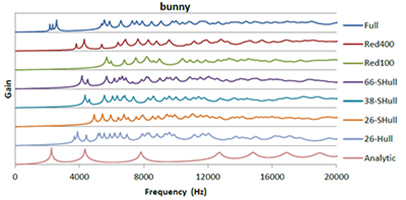
Modal sound synthesis is a promising approach for real-time physically-based sound synthesis. A modal analysis is used to compute characteristic vibration modes from the geometry and material properties of scene objects. These modes allow an efficient sound synthesis at run-time, but the analysis is computationally expensive and thus typically computed in a pre-processing step. In interactive applications, however, objects may be created or modified at run-time. Unless the new shapes are known upfront, the modal data cannot be pre-computed and thus a modal analysis has to be performed at run-time. In this paper, we present a system to compute modal sound data at run-time for interactive applications. We evaluate the computational requirements of the modal analysis to determine the computation time for objects of different complexity. Based on these limits, we propose using different levels-of-detail for the modal analysis, using different geometric approximations that trade speed for accuracy, and evaluate the errors introduced by lower-resolution results. Additionally, we present an asynchronous architecture to distribute and prioritize modal analysis computations.
@inproceedings {vriphys.20151335,
booktitle = {Workshop on Virtual Reality Interaction and Physical Simulation},
editor = {Fabrice Jaillet and Florence Zara and Gabriel Zachmann},
title = {{Level-of-Detail Modal Analysis for Real-time Sound Synthesis}},
author = {Rausch, Dominik and Hentschel, Bernd and Kuhlen, Torsten W.},
year = {2015},
publisher = {The Eurographics Association},
ISBN = {978-3-905674-98-9},
DOI = {10.2312/vriphys.20151335}
pages = {61--70}
}
Nonparametric Facial Feature Localization Using Segment-Based Eigenfeatures
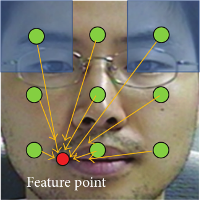
We present a nonparametric facial feature localization method using relative directional information between regularly sampled image segments and facial feature points. Instead of using any iterative parameter optimization technique or search algorithm, our method finds the location of facial feature points by using a weighted concentration of the directional vectors originating from the image segments pointing to the expected facial feature positions. Each directional vector is calculated by linear combination of eigendirectional vectors which are obtained by a principal component analysis of training facial segments in feature space of histogram of oriented gradient (HOG). Our method finds facial feature points very fast and accurately, since it utilizes statistical reasoning from all the training data without need to extract local patterns at the estimated positions of facial features, any iterative parameter optimization algorithm, and any search algorithm. In addition, we can reduce the storage size for the trained model by controlling the energy preserving level of HOG pattern space.
Accurate Contact Modeling for Multi-rate Single-point Haptic Rendering of Static and Deformable Environments
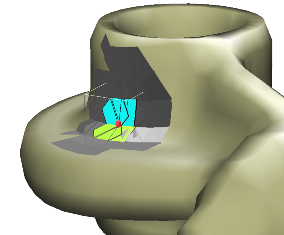
Common approaches for the haptic rendering of complex scenarios employ multi-rate simulation schemes. Here, the collision queries or the simulation of a complex deformable object are often performed asynchronously on a lower frequency, while some kind of intermediate contact representation is used to simulate interactions on the haptic rate. However, this can produce artifacts in the haptic rendering when the contact situation quickly changes and the intermediate representation is not able to reflect the changes due to the lower update rate. We address this problem utilizing a novel contact model. It facilitates the creation of contact representations that are accurate for a large range of motions and multiple simulation time-steps.We handle problematic convex contact regions using a local convex decomposition and special constraints for convex areas.We combine our accurate contact model with an implicit temporal integration scheme to create an intermediate mechanical contact representation, which reflects the dynamic behavior of the simulated objects. Moreover, we propose a new iterative solving scheme for the involved constrained dynamics problems.We increase the robustness of our method using techniques from trust region-based optimization. Our approach can be combined with standard methods for the modeling of deformable objects or constraint-based approaches for the modeling of, for instance, friction or joints. We demonstrate its benefits with respect to the simulation accuracy and the quality of the rendered haptic forces in multiple scenarios.
Best Paper Award!
Bimanual Haptic Simulation of Bone Fracturing for the Training of the Bilateral Sagittal Split Osteotomy
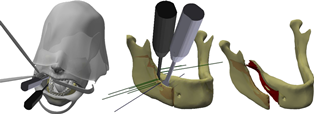
In this work we present a haptic training simulator for a maxillofacial procedure comprising the controlled breaking of the lower mandible. To our knowledge the haptic simulation of fracture is seldom addressed, especially when a realistic breaking behavior is required. Our system combines bimanual haptic interaction with a simulation of the bone based on well-founded methods from fracture mechanics. The system resolves the conflict between simulation complexity and haptic real-time constraints by employing a dedicated multi-rate simulation and a special solving strategy for the occurring mechanical equations. Furthermore, we present remeshing-free methods for collision detection and visualization which are tailored for an efficient treatment of the topological changes induced by the fracture. The methods have been successfully implemented and tested in a simulator prototype using real pathological data and a semi-immersive VR-system with two haptic devices. We evaluated the computational efficiency of our methods and show that a stable and responsive haptic simulation of the fracturing has been achieved.
A Framework for Developing Flexible Virtual-Reality-centered Annotation Systems
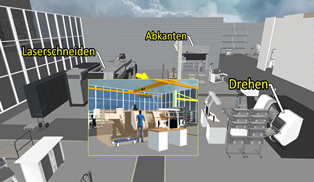
The act of note-taking is an essential part of the data analysis process. It has been realized in form of various annotation systems that have been discussed in many publications. Unfortunately, the focus usually lies on high-level functionality, like interaction metaphors and display strategies. We argue that it is worthwhile to also consider software engineering aspects. Annotation systems often share similar functionality that can potentially be factored into reusable components with the goal to speed up the creation of new annotation systems. At the same time, however, VR-centered annotation systems are not only subject to application-specific requirements, but also to those arising from differences between the various VR platforms, like desktop VR setups or CAVEs. As a result, it is usually necessary to build application-specific VR-centered annotation systems from scratch instead of reusing existing components.
To improve this situation, we present a framework that provides reusable and adaptable building blocks to facilitate the creation of flexible annotation systems for VR applications. We discuss aspects ranging from data representation over persistence to the integration of new data types and interaction metaphors, especially in context of multi-platform applications. To underpin the benefits of such an approach and promote the proposed concepts, we describe how the framework was applied to several of our own projects.
Proceedings of the Workshop on Formal Methods in Human Computer Interaction(FoMHCI)
Conference Proceedings
Simulation-based Ultrasound Training Supported by Annotations, Haptics and Linked Multimodal Views
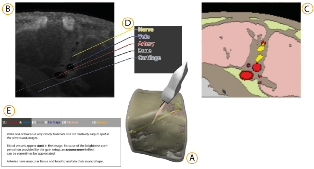
When learning ultrasound (US) imaging, trainees must learn how to recognize structures, interpret textures and shapes, and simultaneously register the 2D ultrasound images to their 3D anatomical mental models. Alleviating the cognitive load imposed by these tasks should free the cognitive resources and thereby improve the learning process. We argue that the amount of cognitive load that is required to mentally rotate the models to match the images to them is too large and therefore negatively impacts the learning process. We present a 3D visualization tool that allows the user to naturally move a 2D slice and navigate around a 3D anatomical model. The slice is displayed in-place to facilitate the registration of the 2D slice in its 3D context. Two duplicates are also shown externally to the model; the first is a simple rendered image showing the outlines of the structures and the second is a simulated ultrasound image. Haptic cues are also provided to the users to help them maneuver around the 3D model in the virtual space. With the additional display of annotations and information of the most important structures, the tool is expected to complement the available didactic material used in the training of ultrasound procedures.
Comparison and Evaluation of Viewpoint Quality Estimation Algorithms for Immersive Virtual Environments
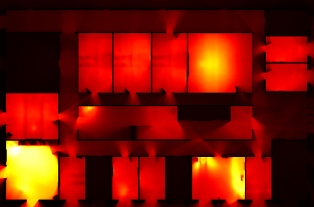
The knowledge of which places in a virtual environment are interesting or informative can be used to improve user interfaces and to create virtual tours. Viewpoint Quality Estimation algorithms approximate this information by calculating quality scores for viewpoints. However, even though several such algorithms exist and have also been used, e.g., in virtual tour generation, they have never been comparatively evaluated on virtual scenes. In this work, we introduce three new Viewpoint Quality Estimation algorithms, and compare them against each other and six existing metrics, by applying them to two different virtual scenes. Furthermore, we conducted a user study to obtain a quantitative evaluation of viewpoint quality. The results reveal strengths and limitations of the metrics on actual scenes, and provide recommendations on which algorithms to use for real applications.
@InProceedings{Freitag2015,
Title = {{Comparison and Evaluation of Viewpoint Quality Estimation Algorithms for Immersive Virtual Environments}},
Author = {Freitag, Sebastian and Weyers, Benjamin and B\"{o}nsch, Andrea and Kuhlen, Torsten W.},
Booktitle = {ICAT-EGVE 2015 - International Conference on Artificial Reality and Telexistence and Eurographics Symposium on Virtual Environments},
Year = {2015},
Pages = {53-60},
Doi = {10.2312/egve.20151310}
}
Haptic 3D Surface Representation of Table-Based Data for People With Visual Impairments
The UN Convention on the Rights of Persons with Disabilities Article 24 states that “States Parties shall ensure inclusive education at all levels of education and life long learning.” This article focuses on the inclusion of people with visual impairments in learning processes including complex table-based data. Gaining insight into and understanding of complex data is a highly demanding task for people with visual impairments. Especially in the case of table-based data, the classic approaches of braille-based output devices and printing concepts are limited. Haptic perception requires sequential information processing rather than the parallel processing used by the visual system, which hinders haptic perception to gather a fast overview of and deeper insight into the data. Nevertheless, neuroscientific research has identified great dependencies between haptic perception and the cognitive processing of visual sensing. Based on these findings, we developed a haptic 3D surface representation of classic diagrams and charts, such as bar graphs and pie charts. In a qualitative evaluation study, we identified certain advantages of our relief-type 3D chart approach. Finally, we present an education model for German schools that includes a 3D printing approach to help integrate students with visual impairments./citation.cfm?id=2700433
Verified Stochastic Methods in Geographic Information System Applications With Uncertainty
Modern localization techniques are based on the Global Positioning System (GPS). In general, the accuracy of the measurement depends on various uncertain parameters. In addition, despite its relevance, a number of localization approaches fail to consider the modeling of uncertainty in geographic information system (GIS) applications. This paper describes a new verified method for uncertain (GPS) localization for use in GPS and GIS application scenarios based on Dempster-Shafer theory (DST), with two-dimensional and interval-valued basic probability assignments. The main benefit our approach offers for GIS applications is a workflow concept using DST-based models that are embedded into an ontology-based semantic querying mechanism accompanied by 3D visualization techniques. This workflow provides interactive means of querying uncertain GIS models semantically and provides visual feedback.
Low-Cost Vision-Based Multi-Person Foot Tracking for CAVE Systems with Under-Floor Projection
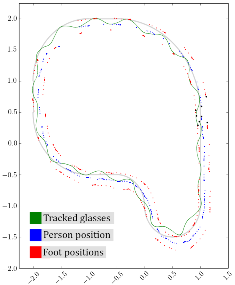
In this work, we present an approach for tracking the feet of multiple users in CAVE-like systems with under-floor projection. It is based on low-cost consumer cameras, does not require users to wear additional equipment, and can be installed without modifying existing components. If the brightness of the floor projection does not contain too much variation, the feet of several people can be successfully and precisely tracked and assigned to individuals. The tracking data can be used to enable or enhance user interfaces like Walking-in-Place or torso-directed steering, provide audio feedback for footsteps, and improve the immersive experience for multiple users.
BlowClick: A Non-Verbal Vocal Input Metaphor for Clicking

In contrast to the wide-spread use of 6-DOF pointing devices, freehand user interfaces in Immersive Virtual Environments (IVE) are non-intrusive. However, for gesture interfaces, the definition of trigger signals is challenging. The use of mechanical devices, dedicated trigger gestures, or speech recognition are often used options, but each comes with its own drawbacks. In this paper, we present an alternative approach, which allows to precisely trigger events with a low latency using microphone input. In contrast to speech recognition, the user only blows into the microphone. The audio signature of such blow events can be recognized quickly and precisely. The results of a user study show that the proposed method allows to successfully complete a standard selection task and performs better than expected against a standard interaction device, the Flystick.
Cirque des Bouteilles: The Art of Blowing on Bottles

Making music by blowing on bottles is fun but challenging. We introduce a novel 3D user interface to play songs on virtual bottles. For this purpose the user blows into a microphone and the stream of air is recreated in the virtual environment and redirected to virtual bottles she is pointing to with her fingers. This is easy to learn and subsequently opens up opportunities for quickly switching between bottles and playing groups of them together to form complex melodies. Furthermore, our interface enables the customization of the virtual environment, by means of moving bottles, changing their type or filling level.
MRI Visualisation by Digitally Reconstructed Radiographs
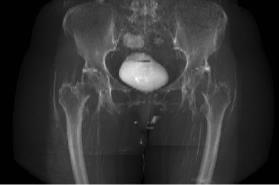
Visualising volumetric medical images such as computed tomography and magnetic resonance imaging (MRI) on picture archiving and communication systems (PACS) clients is often achieved by image browsing in sagittal, coronal or axial views or three-dimensional (3D) rendering. This latter technique requires fine thresholding for MRI. On the other hand, computing virtual radiograph images, also referred to as digitally reconstructed radiographs (DRR), provides in a single two-dimensional (2D) image a complete overview of the 3D data. It appears therefore as a powerful alternative for MRI visualisation and preview in PACS. This study describes a method to compute DRR from T1-weighted MRI. After segmentation of the background, a histogram distribution analysis is performed and each foreground MRI voxel is labeled as one of three tissues: cortical bone, also known as principal absorber of the X-rays, muscle and fat. An intensity level is attributed to each voxel according to the Hounsfield scale, linearly related to the X-ray attenuation coefficient. Each DRR pixel is computed as the accumulation of the new intensities of the MRI dataset along the corresponding X-ray. The method has been tested on 16 T1-weighted MRI sets. Anterior-posterior and lateral DRR have been computed with reasonable qualities and avoiding any manual tissue segmentations.
@Article{Serrurier2015,
Title = {{MRI} {V}isualisation by {D}igitally {R}econstructed {R}adiographs},
Author = {Antoine Serrurier and Andrea B\"{o}nsch and Robert Lau and Thomas M. Deserno (n\'{e} Lehmann)},
Journal = {Proceeding of SPIE 9418, Medical Imaging 2015: PACS and Imaging Informatics: Next Generation and Innovations},
Year = {2015},
Pages = {94180I-94180I-7},
Volume = {9418},
Doi = {10.1117/12.2081845},
Url = {http://rasimas.imib.rwth-aachen.de/output_publications.php}
}
Surface-Reconstructing Growing Neural Gas: A Method for Online Construction of Textured Triangle Meshes
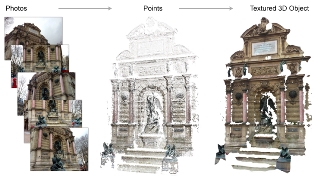
In this paper we propose surface-reconstructing growing neural gas (SGNG), a learning based artificial neural network that iteratively constructs a triangle mesh from a set of sample points lying on an object?s surface. From these input points SGNG automatically approximates the shape and the topology of the original surface. It furthermore assigns suitable textures to the triangles if images of the surface are available that are registered to the points.
By expressing topological neighborhood via triangles, and by learning visibility from the input data, SGNG constructs a triangle mesh entirely during online learning and does not need any post-processing to close untriangulated holes or to assign suitable textures without occlusion artifacts. Thus, SGNG is well suited for long-running applications that require an iterative pipeline where scanning, reconstruction and visualization are executed in parallel.
Results indicate that SGNG improves upon its predecessors and achieves similar or even better performance in terms of smaller reconstruction errors and better reconstruction quality than existing state-of-the-art reconstruction algorithms. If the input points are updated repeatedly during reconstruction, SGNG performs even faster than existing techniques.
Best Paper Award!
Person Attribute Recognition with a Jointly-trained Holistic CNN Model

This paper addresses the problem of human visual attribute recognition, i.e., the prediction of a fixed set of semantic attributes given an image of a person. Previous work often considered the different attributes independently from each other, without taking advantage of possible dependencies between them. In contrast, we propose a method to jointly train a CNN model for all attributes that can take advantage of those dependencies, considering as input only the image without additional external pose, part or context information. We report detailed experiments examining the contribution of individual aspects, which yields beneficial insights for other researchers. Our holistic CNN achieves superior performance on two publicly available attribute datasets improving on methods that additionally rely on pose-alignment or context. To support further evaluations, we present a novel dataset, based on realistic outdoor video sequences, that contains more than 27,000 pedestrians annotated with 10 attributes. Finally, we explore design options to embrace the N/A labels inherently present in this task.
@InProceedings{PARSE27k,
author = {Patrick Sudowe and Hannah Spitzer and Bastian Leibe},
title = {{Person Attribute Recognition with a Jointly-trained Holistic CNN Model}},
booktitle = {ICCV'15 ChaLearn Looking at People Workshop},
year = {2015},
}
A Semantic Occlusion Model for Human Pose Estimation from a Single Depth image
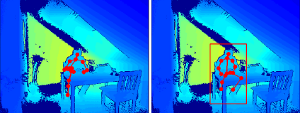
Human pose estimation from depth data has made significant progress in recent years and commercial sensors estimate human poses in real-time. However, state-of-theart methods fail in many situations when the humans are partially occluded by objects. In this work, we introduce a semantic occlusion model that is incorporated into a regression forest approach for human pose estimation from depth data. The approach exploits the context information of occluding objects like a table to predict the locations of occluded joints. In our experiments on synthetic and real data, we show that our occlusion model increases the joint estimation accuracy and outperforms the commercial Kinect 2 SDK for occluded joints.
Sequence-Level Object Candidates Based on Saliency for Generic Object Recognition on Mobile Systems

In this paper, we propose a novel approach for generating generic object candidates for object discovery and recognition in continuous monocular video. Such candidates have recently become a popular alternative to exhaustive window-based search as basis for classification. Contrary to previous approaches, we address the candidate generation problem at the level of entire video sequences instead of at the single image level. We propose a processing pipeline that starts from individual region candidates and tracks them over time. This enables us to group candidates for similar objects and to automatically filter out inconsistent regions. For generating the per-frame candidates, we introduce a novel multi-scale saliency approach that achieves a higher per-frame recall with fewer candidates than current state-of-the-art methods. Taken together, those two components result in a significant reduction of the number of object candidates compared to frame level methods, while keeping a consistently high recall.
Robust Marker-Based Tracking for Measuring Crowd Dynamics
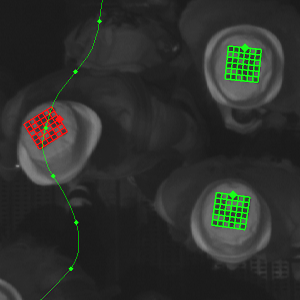
We present a system to conduct laboratory experiments with thousands of pedestrians. Each participant is equipped with an individual marker to enable us to perform precise tracking and identification. We propose a novel rotation invariant marker design which guarantees a minimal Hamming distance between all used codes. This increases the robustness of pedestrian identification. We present an algorithm to detect these markers, and to track them through a camera network. With our system we are able to capture the movement of the participants in great detail, resulting in precise trajectories for thousands of pedestrians. The acquired data is of great interest in the field of pedestrian dynamics. It can also potentially help to improve multi-target tracking approaches, by allowing better insights into the behaviour of crowds.
Influence of Temporal Delay and Display Update Rate in an Augmented Reality Application Scenario
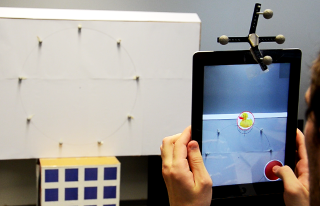
In mobile augmented reality (AR) applications, highly complex computing tasks such as position tracking and 3D rendering compete for limited processing resources. This leads to unavoidable system latency in the form of temporal delay and reduced display update rates. In this paper we present a user study on the influence of these system parameters in an AR point'n'click scenario. Our experiment was conducted in a lab environment to collect quantitative data (user performance as well as user perceived ease of use). We can show that temporal delay and update rate both affect user performance and experience but that users are much more sensitive to longer temporal delay than to lower update rates. Moreover, we found that the effects of temporal delay and update rate are not independent as with longer temporal delay, changing update rates tend to have less impact on the ease of use. Furthermore, in some cases user performance can actually increase when reducing the update rate in order to make it compatible to the latency. Our findings indicate that in the development of mobile AR applications, more emphasis should be put on delay reduction than on update rate improvement and that increasing the update rate does not necessarily improve user performance and experience if the temporal delay is significantly higher than the update interval.
@inproceedings{Li:2015:ITD:2836041.2836070,
author = {Li, Ming and Arning, Katrin and Vervier, Luisa and Ziefle, Martina and Kobbelt, Leif},
title = {Influence of Temporal Delay and Display Update Rate in an Augmented Reality Application Scenario},
booktitle = {Proceedings of the 14th International Conference on Mobile and Ubiquitous Multimedia},
series = {MUM '15},
year = {2015},
isbn = {978-1-4503-3605-5},
location = {Linz, Austria},
pages = {278--286},
numpages = {9},
url = {http://doi.acm.org/10.1145/2836041.2836070},
doi = {10.1145/2836041.2836070},
acmid = {2836070},
publisher = {ACM},
address = {New York, NY, USA},
keywords = {display update rate, ease of use, latency, mobile augmented reality, perception tolerance, point'n'click, temporal delay, user study},
}
Packet-Oriented Streamline Tracing on Modern SIMD Architectures
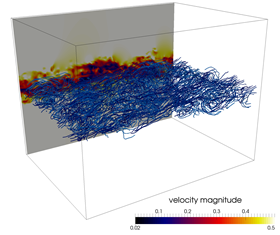
The advection of integral lines is an important computational kernel in vector field visualization. We investigate how this kernel can profit from vector (SIMD) extensions in modern CPUs. As a baseline, we formulate a streamline tracing algorithm that facilitates auto-vectorization by an optimizing compiler. We analyze this algorithm and propose two different optimizations. Our results show that particle tracing does not per se benefit from SIMD computation. Based on a careful analysis of the auto-vectorized code, we propose an optimized data access routine and a re-packing scheme which increases average SIMD efficiency. We evaluate our approach on three different, turbulent flow fields. Our optimized approaches increase integration performance up to 5:6 over our baseline measurement. We conclude with a discussion of current limitations and aspects for future work.
@INPROCEEDINGS{Hentschel2015,
author = {Bernd Hentschel and Jens Henrik G{\"o}bbert and Michael Klemm and
Paul Springer and Andrea Schnorr and Torsten W. Kuhlen},
title = {{P}acket-{O}riented {S}treamline {T}racing on {M}odern {SIMD}
{A}rchitectures},
booktitle = {Proceedings of the Eurographics Symposium on Parallel Graphics
and Visualization},
year = {2015},
pages = {43--52},
abstract = {The advection of integral lines is an important computational
kernel in vector field visualization. We investigate
how this kernel can profit from vector (SIMD) extensions in modern CPUs. As a
baseline, we formulate a streamline
tracing algorithm that facilitates auto-vectorization by an optimizing compiler.
We analyze this algorithm and
propose two different optimizations. Our results show that particle tracing does
not per se benefit from SIMD computation.
Based on a careful analysis of the auto-vectorized code, we propose an optimized
data access routine
and a re-packing scheme which increases average SIMD efficiency. We evaluate our
approach on three different,
turbulent flow fields. Our optimized approaches increase integration performance
up to 5.6x over our baseline
measurement. We conclude with a discussion of current limitations and aspects
for future work.}
}
Gaze Guiding zur Unterstützung der Bedienung technischer Systeme
Die Vermeidung von Bedienfehlern ist gerade in sicherheitskritischen Systemen von zentraler Bedeutung. Um das Wiedererinnern an einmal erlernte Fähigkeiten für das Bedienen und Steuern technischer Systeme zu erleichtern und damit Fehler zu vermeiden, werden sogenannte Refresher Interventionen eingesetzt. Hierbei handelt es sich bisher zumindest um aufwändige Simulations- oder Simulationstrainings, die bereits erlernte Fähigkeiten durch deren wiederholte Ausführung auffrischen und so in selten auftretenden kritischen Situationen korrekt abrufbar machen. Die vorliegende Arbeit zeigt wie das Ziel des Wiedererinnerns auch ohne Refresher in Form einer Gaze Guiding Komponente erreicht werden kann, die in eine visuelle Benutzerschnittstelle zur Bedienung des technischen Prozesses eingebettet wird und den Fertigkeitsabruf durch gezielte kontextabhängige Ein- und Überblendungen unterstützt. Die Wirkung dieses Konzepts wird zurzeit in einer größeren DFG-geförderten Studie untersucht.
An Integrative Tool Chain for Collaborative Virtual Museums in Immersive Virtual Environments
Various conceptual approaches for the creation and presentation of virtual museums can be found. However, less work exists that concentrates on collaboration in virtual museums. The support of collaboration in virtual museums provides various benefits for the visit as well as the preparation and creation of virtual exhibits. This paper addresses one major problem of collaboration in virtual museums: the awareness of visitors. We use a Cave Automated Virtual Environment (CAVE) for the visualization of generated virtual museums to offer simple awareness through co-location. Furthermore, the use of smartphones during the visit enables the visitors to create comments or to access exhibit related metadata. Thus, the main contribution of this ongoing work is the presentation of a workflow that enables an integrated deployment of generic virtual museums into a CAVE, which will be demonstrated by deploying the virtual Leopold Fleischhacker Museum.
Crowdsourcing and Knowledge Co-creation in Virtual Museums
This paper gives an overview on crowdsourcing practices in virtual mu-seums. Engaged nonprofessionals and specialists support curators in creating digi-tal 2D or 3D exhibits, exhibitions and tour planning and enhancement of metadata using the Virtual Museum and Cultural Object Exchange Format (ViMCOX). ViMCOX provides the semantic structure of exhibitions and complete museums and includes new features, such as room and outdoor design, interactions with artwork, path planning and dissemination and presentation of contents. Applica-tion examples show the impact of crowdsourcing in the Museo de Arte Contem-poraneo in Santiago de Chile and in the virtual museum depicting the life and work of the Jewish sculptor Leopold Fleischhacker. A further use case is devoted to crowd-based support for restoration of high-quality 3D shapes.
"Workshop on Formal Methods in Human Computer Interaction."
This workshop aims to gather active researchers and practitioners in the field of formal methods in the context of user interfaces, interaction techniques, and interactive systems. The main objectives are to look at the evolutions of the definition and use of formal methods for interactive systems since the last book on the field nearly 20 years ago and also to identify important themes for the next decade of research. The goals of this workshop are to offer an exchange platform for scientists who are interested in the formal modeling and description of interaction, user interfaces, and interactive systems and to discuss existing formal modeling methods in this area of conflict. Participants will be asked to present their perspectives, concepts, and techniques for formal modeling along one of two case studies – the control of a nuclear power plant and an air traffic management arrival manager.
FILL: Formal Description of Executable and Reconfigurable Models of Interactive Systems
This paper presents the Formal Interaction Logic Language (FILL) as modeling approach for the description of user interfaces in an executable way. In the context of the workshop on Formal Methods in Human Computer Interaction, this work presents FILL by first introducing its architectural structure, its visual representation and transformation of reference nets, a special type of Petri nets, and finally discussing FILL in context of two use case proposed by the workshop. Therefore, this work shows how FILL can be used to model automation as part of the user interface model as well as how formal reconfiguration can be used to implement user-based automation given a formal user interface model.
3DUIdol-6th Annual 3DUI Contest.
The 6th annual IEEE 3DUI contest focuses on Virtual Music Instruments (VMIs), and on 3D user interfaces for playing them. The Contest is part of the IEEE 2015 3DUI Symposium held in Arles, France. The contest is open to anyone interested in 3D User Interfaces (3DUIs), from researchers to students, enthusiasts, and professionals. The purpose of the contest is to stimulate innovative and creative solutions to challenging 3DUI problems. Due to the recent explosion of affordable and portable 3D devices, this year's contest will be judged live at 3DUI. The judgment will be done by selected 3DUI experts during on-site presentation during the conference. Therefore, contestants are required to bring their systems for live judging and for attendees to experience them.
Poster: Scalable Metadata In- and Output for Multi-platform Data Annotation Applications

Metadata in- and output are important steps within the data annotation process. However, selecting techniques that effectively facilitate these steps is non-trivial, especially for applications that have to run on multiple virtual reality platforms. Not all techniques are applicable to or available on every system, requiring to adapt workflows on a per-system basis. Here, we describe a metadata handling system based on Android's Intent system that automatically adapts workflows and thereby makes manual adaption needless.
Poster: Vision-based Multi-Person Foot Tracking for CAVE Systems with Under-Floor Projection

In this work, we present an approach for tracking the feet of mul- tiple users in CAVE-like systems with under-floor projection. It is based on low-cost consumer cameras, does not require users to wear additional equipment, and can be installed without modifying existing components. If the brightness of the floor projection does not contain too much variation, the feet of several people can be reliably tracked and assigned to individuals.
Poster: Effects and Applicability of Rotation Gain in CAVE-like Environments
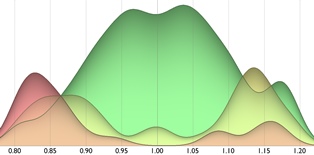
In this work, we report on a pilot study we conducted, and on a study design, to examine the effects and applicability of rotation gain in CAVE-like virtual environments. The results of the study will give recommendations for the maximum levels of rotation gain that are reasonable in algorithms for enlarging the virtual field of regard or redirected walking.
Poster: flapAssist: How the Integration of VR and Visualization Tools Fosters the Factory Planning Process

Virtual Reality (VR) systems are of growing importance to aid decision support in the context of the digital factory, especially factory layout planning. While current solutions either focus on virtual walkthroughs or the visualization of more abstract information, a solution that provides both, does currently not exist. To close this gap, we present a holistic VR application, called Factory Layout Planning Assistant (flapAssist). It is meant to serve as a platform for planning the layout of factories, while also providing a wide range of analysis features. By being scalable from desktops to CAVEs and providing a link to a central integration platform, flapAssist integrates well in established factory planning workflows.
Poster: Tracking Space-Filling Structures in Turbulent Flows
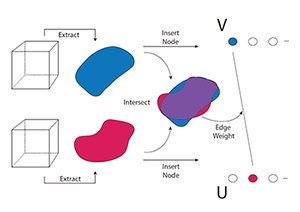
We present a novel approach for tracking space-filling features, i.e. a set of features which covers the entire domain. In contrast to previous work, we determine the assignment between features from successive time steps by computing a globally optimal, maximum-weight, maximal matching on a weighted, bi-partite graph. We demonstrate the method's functionality by tracking dissipation elements (DEs), a space-filling structure definition from turbulent flow analysis. The ability to track DEs over time enables researchers from fluid mechanics to extend their analysis beyond the assessment of static flow fields to time-dependent settings.
@INPROCEEDINGS{Schnorr2015,
author = {Andrea Schnorr and Jens-Henrik Goebbert and Torsten W. Kuhlen and Bernd Hentschel},
title = {{T}racking {S}pace-{F}illing {S}tructures in {T}urbulent {F}lows},
booktitle = Proc # { the } # LDAV,
year = {2015},
pages = {143--144},
abstract = {We present a novel approach for tracking space-filling features, i.e. a set of features which covers the entire domain. In contrast to previous work, we determine the assignment between features from successive time steps by computing a globally optimal, maximum-weight, maximal matching on a weighted, bi-partite graph. We demonstrate the method's functionality by tracking dissipation elements (DEs), a space-filling structure definition from turbulent flow analysis. The abilitytotrack DEs over time enables researchers from fluid mechanics to extend their analysis beyond the assessment of static flow fields to time-dependent settings.},
doi = {10.1109/LDAV.2015.7348089},
keywords = {Feature Tracking, Weighted, Bi-Partite Matching, Flow
Visualization, Dissipation Elements}
}
Methodology for Generating Individualized Trajectories from Experiments
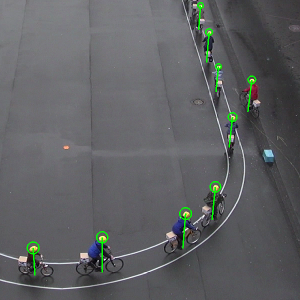
Traffic research has reached a point where trajectories are available for microscopic analysis. The next step will be trajectories which are connected to human factors, i.e information about the agent. The first step in pedestrian dynamics has been done using video recordings to generate precise trajectories. We go one step further and present two experiments for which ID markers are used to produce individualized trajectories: a large-scale experiment on pedestrian dynamics and an experiment on single-file bicycle traffic. The camera set-up has to be carefully chosen when using ID markers. It has to facilitate reading out the markers, while at the same time being able to capture the whole experiment. We propose two set-ups to address this problem and report on experiments conducted with these set-ups.
Imalytics Preclinical: Interactive Analysis of Biomedical Volume Data
A software tool is presented for interactive segmentation of volumetric medical data sets. To allow interactive processing of large data sets, segmentation operations, and rendering are GPU-accelerated. Special adjustments are provided to overcome GPU-imposed constraints such as limited memory and host-device bandwidth. A general and efficient undo/redo mechanism is implemented using GPU-accelerated compression of the multiclass segmentation state. A broadly applicable set of interactive segmentation operations is provided which can be combined to solve the quantification task of many types of imaging studies. A fully GPU-accelerated ray casting method for multiclass segmentation rendering is implemented which is well-balanced with respect to delay, frame rate, worst-case memory consumption, scalability, and image quality. Performance of segmentation operations and rendering are measured using high resolution example data sets showing that GPU-acceleration greatly improves the performance. Compared to a reference marching cubes implementation, the rendering was found to be superior with respect to rendering delay and worst-case memory consumption while providing sufficiently high frame rates for interactive visualization and comparable image quality.
Efficient Dense Rigid-Body Motion Segmentation and Estimation in RGB-D Video

Motion is a fundamental grouping cue in video. Many current approaches to motion segmentation in monocular or stereo image sequences rely on sparse interest points or are dense but computationally demanding. We propose an efficient expectation-maximization (EM) framework for dense 3D segmentation of moving rigid parts in RGB-D video. Our approach segments images into pixel regions that undergo coherent 3D rigid-body motion. Our formulation treats background and foreground objects equally and poses no further assumptions on the motion of the camera or the objects than rigidness. While our EM-formulation is not restricted to a specific image representation, we supplement it with efficient image representation and registration for rapid segmentation of RGB-D video. In experiments, we demonstrate that our approach recovers segmentation and 3D motion at good precision.
@string{ijcv="International Journal of Computer Vision"}
@article{stueckler-ijcv15,
author = {J. Stueckler and S. Behnke},
title = {Efficient Dense Rigid-Body Motion Segmentation and Estimation in RGB-D Video},
journal = ijcv,
month = jan,
year = {2015},
doi = {10.1007/s11263-014-0796-3},
publisher = {Springer US},
}
Ein Konzept zur Integration von Virtual Reality Anwendungen zur Verbesserung des Informationsaustauschs im Fabrikplanungsprozess - A Concept for the Integration of Virtual Reality Applications to Improve the Information Exchange within the Factory Planning Process
Factory planning is a highly heterogeneous process that involves various expert groups at the same time. In this context, the communication between different expert groups poses a major challenge. One reason for this lies in the differing domain knowledge of individual groups. However, since decisions made within one domain usually have an effect on others, it is essential to make these domain interactions visible to all involved experts in order to improve the overall planning process. In this paper, we present a concept that facilitates the integration of two separate virtual-reality- and visualization analysis tools for different application domains of the planning process. The concept was developed in context of the Virtual Production Intelligence and aims at creating an approach to making domain interactions visible, such that the aforementioned challenges can be mitigated.
@Article{Pick2015,
Title = {“Ein Konzept zur Integration von Virtual Reality Anwendungen zur Verbesserung des Informationsaustauschs im Fabrikplanungsprozess”},
Author = {S. Pick, S. Gebhardt, B. Hentschel, T. W. Kuhlen, R. Reinhard, C. Büscher, T. Al Khawli, U. Eppelt, H. Voet, and J. Utsch},
Journal = {Tagungsband 12. Paderborner Workshop Augmented \& Virtual Reality in der Produktentstehung},
Year = {2015},
Pages = {139--152}
}
Ein Ansatz zur Softwaretechnischen Integration von Virtual Reality Anwendungen am Beispiel des Fabrikplanungsprozesses - An Approach for the Softwaretechnical Integration of Virtual Reality Applications by the Example of the Factory Planning Process

The integration of independent applications is a complex task from a software engineering perspective. Nonetheless, it entails significant benefits, especially in the context of Virtual Reality (VR) supported factory planning, e.g., to communicate interdependencies between different domains. To emphasize this aspect, we integrated two independent VR and visualization applications into a holistic planning solution. Special focus was put on parallelization and interaction aspects, while also considering more general requirements of such an integration process. In summary, we present technical solutions for the effective integration of several VR applications into a holistic solution with the integration of two applications from the context of factory planning with special focus on parallelism and interaction aspects. The effectiveness of the approach is demonstrated by performance measurements.
@Article{Gebhardt2015,
Title = {“Ein Ansatz zur Softwaretechnischen Integration von Virtual Reality Anwendungen am Beispiel des Fabrikplanungsprozesses”},
Author = {S. Gebhardt, S. Pick, B. Hentschel, T. W. Kuhlen, R. Reinhard, and C. Büscher},
Journal = {Tagungsband 12. Paderborner Workshop Augmented \& Virtual Reality in der Produktentstehung},
Year = {2015},
Pages = {153--166}
}
NimbRo Explorer: Semi-Autonomous Exploration and Mobile Manipulation in Rough Terrain

Fully autonomous exploration and mobile manipulation in rough terrain are still beyond the state of the art—robotics challenges and competitions are held to facilitate and benchmark research in this direction. One example is the DLR SpaceBot Cup 2013, for which we developed an integrated robot system to semi-autonomously perform planetary exploration and manipulation tasks. Our robot explores, maps, and navigates in previously unknown, uneven terrain using a 3D laser scanner and an omnidirectional RGB-D camera. We developed manipulation capabilities for object retrieval and pick-and-place tasks. Many parts of the mission can be performed autonomously. In addition, we developed teleoperation interfaces on different levels of shared autonomy which allow for specifying missions, monitoring mission progress, and on-the-fly reconfiguration. To handle network communication interruptions and latencies between robot and operator station, we implemented a robust network layer for the middleware ROS. The integrated system has been demonstrated at the DLR SpaceBot Cup 2013. In addition, we conducted systematic experiments to evaluate the performance of our approaches.
@article{stueckler15_jfr_explorer,
author={J. Stueckler and M. Schwarz and M. Schadler and A. Topalidou-Kyniazopoulou and S. Behnke},
title={NimbRo Explorer: Semi-Autonomous Exploration and Mobile Manipulation in Rough Terrain},
journal={Journal of Field Robotics},
note={published online},
year={2015},
}
Pedestrian Line Counting by Probabilistic Combination of Flow and Appearance Information
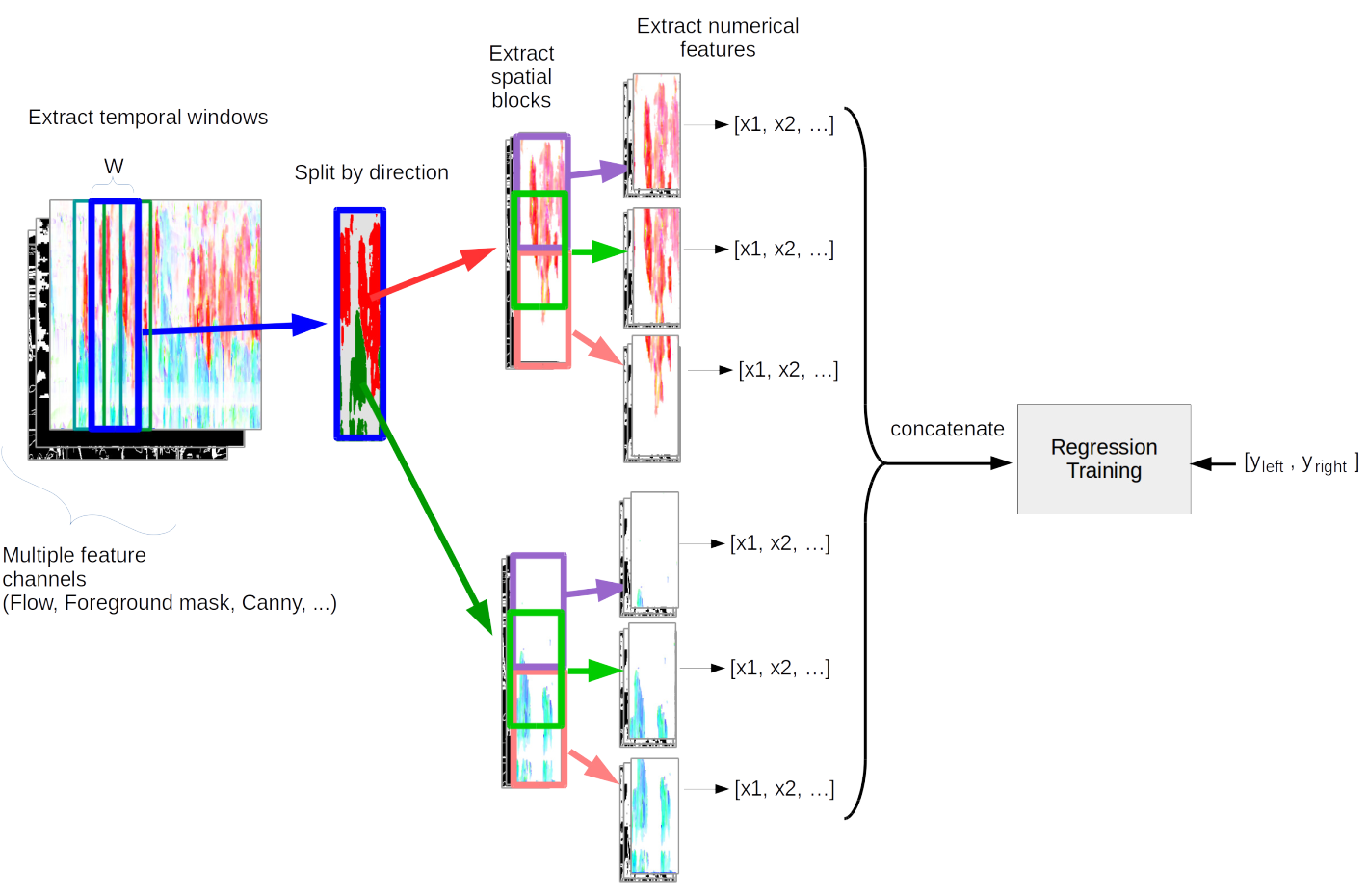
In this thesis we examine the task of estimating how many pedestrians cross a given line in a surveillance video, in the presence of high occlusion and dense crowds. We show that a prior, blob-based pedestrian line counting method fails on our newly annotated private dataset, which is more challenging than those used in the literature.
We propose a new spatiotemporal slice-based method that works with simple low-level features based on optical flow, background subtraction and edge detection and show that it produces good results on the new dataset. Furthermore, presumably due to the very simple and general nature of the features we use, the method also performs well on the popular UCSD vidd dataset without additional hyperparameter tuning, showing the robustness of our approach.
We design new evaluation measures that generalize the precision and recall used in information retrieval and binary classification to continuous, instantaneous pedestrian flow estimations and we argue that they are better suited to this task than currently used measures.
We also consider the relations between pedestrian region counting and line counting by comparing the output of a region counting method with the counts that we derive from line counting. Finally we show a negative result, where a probabilistic method for combining line and region counter outputs does not lead to the hoped result of mutually improved counters.
Sequence-Discriminative Training of Recurrent Neural Networks
We investigate sequence-discriminative training of long short-term memory recurrent neural networks using the maximum mutual information criterion. We show that although recurrent neural networks already make use of the whole observation sequence and are able to incorporate more contextual information than feed forward networks, their performance can be improved with sequence-discriminative training. Experiments are performed on two publicly available handwriting recognition tasks containing English and French handwriting. On the English corpus, we obtain a relative improvement in WER of over 11% with maximum mutual information (MMI) training compared to cross-entropy training. On the French corpus, we observed that it is necessary to interpolate the MMI objective function with cross-entropy.
@InProceedings { voigtlaender2015:seq,
author= {Voigtlaender, Paul and Doetsch, Patrick and Wiesler, Simon and Schlüter, Ralf and Ney, Hermann},
title= {Sequence-Discriminative Training of Recurrent Neural Networks},
booktitle= {IEEE International Conference on Acoustics, Speech, and Signal Processing},
year= 2015,
pages= {2100-2104},
address= {Brisbane, Australia},
month= apr,
booktitlelink= {http://icassp2015.org/}
}
Multi-Layered Mapping and Navigation for Autonomous Micro Aerial Vehicles
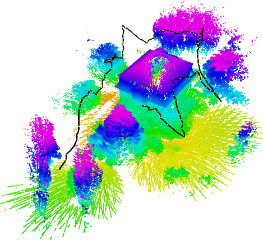
Micro aerial vehicles, such as multirotors, are particularly well suited for the autonomous monitoring, inspection, and surveillance of buildings, e.g., for maintenance or disaster management. Key prerequisites for the fully autonomous operation of micro aerial vehicles are real-time obstacle detection and planning of collision-free trajectories. In this article, we propose a complete system with a multimodal sensor setup for omnidirectional obstacle perception consisting of a 3D laser scanner, two stereo camera pairs, and ultrasonic distance sensors. Detected obstacles are aggregated in egocentric local multiresolution grid maps. Local maps are efficiently merged in order to simultaneously build global maps of the environment and localize in these. For autonomous navigation, we generate trajectories in a multi-layered approach: from mission planning over global and local trajectory planning to reactive obstacle avoidance. We evaluate our approach and the involved components in simulation and with the real autonomous micro aerial vehicle. Finally, we present the results of a complete mission for autonomously mapping a building and its surroundings.
@article{droeschel15-jfr-mod,
author={D. Droeschel and M. Nieuwenhuisen and M. Beul and J. Stueckler and D. Holz and S. Behnke},
title={Multi-Layered Mapping and Navigation for Autonomous Micro Aerial Vehicles},
journal={Journal of Field Robotics},
year={2015},
note={published online},
}
Dense Continuous-Time Tracking and Mapping with Rolling Shutter RGB-D Cameras
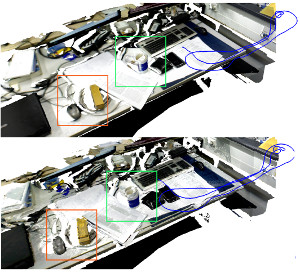
We propose a dense continuous-time tracking and mapping method for RGB-D cameras. We parametrize the camera trajectory using continuous B-splines and optimize the trajectory through dense, direct image alignment. Our method also directly models rolling shutter in both RGB and depth images within the optimization, which improves tracking and reconstruction quality for low-cost CMOS sensors. Using a continuous trajectory representation has a number of advantages over a discrete-time representation (e.g. camera poses at the frame interval). With splines, less variables need to be optimized than with a discrete represen- tation, since the trajectory can be represented with fewer control points than frames. Splines also naturally include smoothness constraints on derivatives of the trajectory estimate. Finally, the continuous trajectory representation allows to compensate for rolling shutter effects, since a pose estimate is available at any exposure time of an image. Our approach demonstrates superior quality in tracking and reconstruction compared to approaches with discrete-time or global shutter assumptions.
@string{iccv="IEEE International Conference on Computer Vision (ICCV)"}
@inproceedings{kerl15iccv,
author = {C. Kerl and J. Stueckler and D. Cremers},
title = {Dense Continuous-Time Tracking and Mapping with Rolling Shutter {RGB-D} Cameras},
booktitle = iccv,
year = {2015},
address = {Santiago, Chile},
}
Motion Cooperation: Smooth Piece-Wise Rigid Scene Flow from RGB-D Images
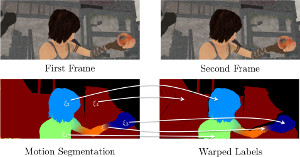
We propose a novel joint registration and segmentation approach to estimate scene flow from RGB-D images. In- stead of assuming the scene to be composed of a number of independent rigidly-moving parts, we use non-binary labels to capture non-rigid deformations at transitions between the rigid parts of the scene. Thus, the velocity of any point can be computed as a linear combination (interpolation) of the estimated rigid motions, which provides better results than traditional sharp piecewise segmentations. Within a variational framework, the smooth segments of the scene and their corresponding rigid velocities are alternately re- fined until convergence. A K-means-based segmentation is employed as an initialization, and the number of regions is subsequently adapted during the optimization process to capture any arbitrary number of independently moving ob- jects. We evaluate our approach with both synthetic and real RGB-D images that contain varied and large motions. The experiments show that our method estimates the scene flow more accurately than the most recent works in the field, and at the same time provides a meaningful segmentation of the scene based on 3D motion.
@inproceedings{jaimez15_mocoop,
author= {M. Jaimez and M. Souiai and J. Stueckler and J. Gonzalez-Jimenez and D. Cremers},
title = {Motion Cooperation: Smooth Piece-Wise Rigid Scene Flow from RGB-D Images},
booktitle = {Proc. of the Int. Conference on 3D Vision (3DV)},
month = oct,
year = 2015,
}
Reconstructing Street-Scenes in Real-Time From a Driving Car
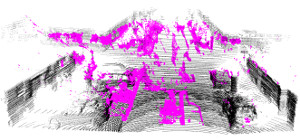
Most current approaches to street-scene 3D reconstruction from a driving car to date rely on 3D laser scanning or tedious offline computation from visual images. In this paper, we compare a real-time capable 3D reconstruction method using a stereo extension of large-scale di- rect SLAM (LSD-SLAM) with laser-based maps and traditional stereo reconstructions based on processing individual stereo frames. In our reconstructions, small-baseline comparison over several subsequent frames are fused with fixed-baseline disparity from the stereo camera setup. These results demonstrate that our direct SLAM technique provides an excellent compromise between speed and accuracy, generating visually pleasing and globally consistent semi- dense reconstructions of the environment in real-time on a single CPU.
@inproceedings{usenko15_3drecon_stereolsdslam,
author= {V. Usenko and J. Engel and J. Stueckler and D. Cremers},
title = {Reconstructing Street-Scenes in Real-Time From a Driving Car},
booktitle = {Proc. of the Int. Conference on 3D Vision (3DV)},
month = oct,
year = 2015,
}
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures

We propose a novel fast and robust method for obtaining 3D models with high-quality appearance using commod- ity RGB-D sensors. Our method uses a direct keyframe- based SLAM frontend to consistently estimate the camera motion during the scan. The aligned images are fused into a volumetric truncated signed distance function rep- resentation, from which we extract a mesh. For obtaining a high-quality appearance model, we additionally deblur the low-resolution RGB-D frames using filtering techniques and fuse them into super-resolution keyframes. The meshes are textured from these sharp super-resolution keyframes employing a texture mapping approach. In experiments, we demonstrate that our method achieves superior quality in appearance compared to other state-of-the-art approaches.
@inproceedings{maier2015superresolution,
author= {R. Maier and J. Stueckler and D. Cremers},
title = {Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures},
booktitle = {International Conference on 3D Vision ({3DV})},
month = October,
year = 2015,
}
Large-Scale Direct SLAM with Stereo Cameras
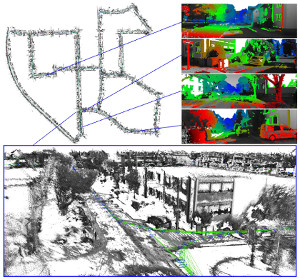
We propose a novel Large-Scale Direct SLAM algorithm for stereo cameras (Stereo LSD-SLAM) that runs in real-time at high frame rate on standard CPUs. In contrast to sparse interest-point based methods, our approach aligns images directly based on the photoconsistency of all high- contrast pixels, including corners, edges and high texture areas. It concurrently estimates the depth at these pixels from two types of stereo cues: Static stereo through the fixed-baseline stereo camera setup as well as temporal multi-view stereo exploiting the camera motion. By incorporating both disparity sources, our algorithm can even estimate depth of pixels that are under-constrained when only using fixed-baseline stereo. Using a fixed baseline, on the other hand, avoids scale-drift that typically occurs in pure monocular SLAM. We furthermore propose a robust approach to enforce illumination invariance, capable of handling aggressive brightness changes between frames – greatly improving the performance in realistic settings. In experiments, we demonstrate state-of-the-art results on stereo SLAM benchmarks such as Kitti or challenging datasets from the EuRoC Challenge 3 for micro aerial vehicles.
@string{iros="International Conference on Intelligent Robots and Systems (IROS)"}
@inproceedings{engel2015_stereo_lsdslam,
author = {J. Engel and J. Stueckler and D. Cremers},
title = {Large-Scale Direct SLAM with Stereo Cameras},
booktitle = iros,
year = 2015,
month = sept,
}
Real-Time Object Detection, Localization and Verification for Fast Robotic Depalletizing
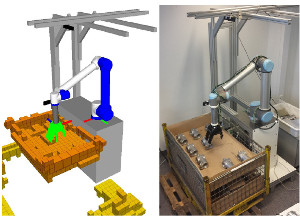
Depalletizing is a challenging task for manipulation robots. Key to successful application are not only robustness of the approach, but also achievable cycle times in order to keep up with the rest of the process. In this paper, we propose a system for depalletizing and a complete pipeline for detecting and localizing objects as well as verifying that the found object does not deviate from the known object model, e.g., if it is not the object to pick. In order to achieve high robustness (e.g., with respect to different lighting conditions) and generality with respect to the objects to pick, our approach is based on multi-resolution surfel models. All components (both software and hardware) allow operation at high frame rates and, thus, allow for low cycle times. In experiments, we demonstrate depalletizing of automotive and other prefabricated parts with both high reliability (w.r.t. success rates) and efficiency (w.r.t. low cycle times).
@string{iros="International Conference on Intelligent Robots and Systems (IROS)"}
@inproceedings{holz2015_depalette,
author = {D. Holz and A. Topalidou-Kyniazopoulou and J. Stueckler and S. Behnke},
title = {Real-Time Object Detection, Localization and Verification for Fast Robotic Depalletizing},
booktitle = iros,
year = 2015,
}
SPENCER: A Socially Aware Service Robot for Passenger Guidance and Help in Busy Airports

We present an ample description of a socially compliant mobile robotic platform, which is developed in the EU-funded project SPENCER. The purpose of this robot is to assist, inform and guide passengers in large and busy airports. One particular aim is to bring travellers of connecting flights conveniently and efficiently from their arrival gate to the passport control. The uniqueness of the project stems from the strong demand of service robots for this application with a large potential impact for the aviation industry on one side, and on the other side from the scientific advancements in social robotics, brought forward and achieved in SPENCER. The main contributions of SPENCER are novel methods to perceive, learn, and model human social behavior and to use this knowledge to plan appropriate actions in real- time for mobile platforms. In this paper, we describe how the project advances the fields of detection and tracking of individuals and groups, recognition of human social relations and activities, normative human behavior learning, socially-aware task and motion planning, learning socially annotated maps, and conducting empir- ical experiments to assess socio-psychological effects of normative robot behaviors.
@article{triebel2015spencer,
title={SPENCER: a socially aware service robot for passenger guidance and help in busy airports},
author={Triebel, Rudolph and Arras, Kai and Alami, Rachid and Beyer, Lucas and Breuers, Stefan and Chatila, Raja and Chetouani, Mohamed and Cremers, Daniel and Evers, Vanessa and Fiore, Michelangelo and Hung, Hayley and Islas Ramírez, Omar A. and Joosse, Michiel and Khambhaita, Harmish and Kucner, Tomasz and Leibe, Bastian and Lilienthal, Achim J. and Linder, Timm and Lohse, Manja and Magnusson, Martin and Okal, Billy and Palmieri, Luigi and Rafi, Umer and Rooij, Marieke van and Zhang, Lu},
journal={Field and Service Robotics (FSR)
year={2015},
publisher={University of Toronto}
}
Immersive Art: Using a CAVE-like Virtual Environment for the Presentation of Digital Works of Art

Digital works of art are often created using some kind of modeling software, like Cinema4D. Usually they are presented in a non-interactive form, like large Diasecs, and can thus only be experienced by passive viewing. To explore alternative, more captivating presentation channels, we investigate the use of a CAVE virtual reality (VR) system as an immersive and interactive presentation platform in this paper. To this end, in a collaboration with an artist, we built an interactive VR experience from one of his existing works. We provide details on our design and report on the results of a qualitative user study.
@Article{Pick2015,
Title = {{Immersive Art: Using a CAVE-like Virtual Environment for the Presentation of Digitial Works of Art}},
Author = {Pick, Sebastian and B\"{o}nsch, Andrea and Scully, Dennis and Kuhlen, Torsten W.},
Journal = {{V}irtuelle und {E}rweiterte {R}ealit\"at, 12. {W}orkshop der {GI}-{F}achgruppe {VR}/{AR}},
Year = {2015},
Pages = {10-21},
ISSN = {978-3-8440-3868-2},
Publisher = {Shaker Verlag}
}
Probabilistic Labeling Cost for High-Accuracy Multi-view Reconstruction
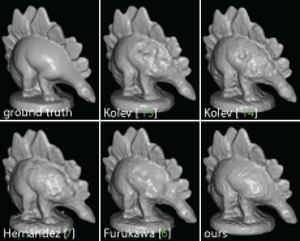
In this paper, we propose a novel labeling cost for multiview reconstruction. Existing approaches use data terms with specific weaknesses that are vulnerable to common challenges, such as low-textured regions or specularities. Our new probabilistic method implicitly discards outliers and can be shown to become more exact the closer we get to the true object surface. Our approach achieves top results among all published methods on the Middlebury DINO SPARSE dataset and also delivers accurate results on several other datasets with widely varying challenges, for which it works in unchanged form.
Level-of-Detail Quad Meshing
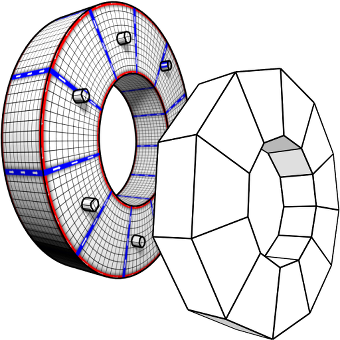
The most effective and popular tools for obtaining feature aligned quad meshes from triangular input meshes are based on cross field guided parametrization. These methods are incarnations of a conceptual three-step pipeline: (1) cross field computation, (2) field-guided surface parametrization, (3) quad mesh extraction. While in most meshing scenarios the user prescribes a desired target quad size or edge length, this information is typically taken into account from step 2 onwards only, but not in the cross field computation step. This turns into a problem in the presence of small scale geometric or topological features or noise in the input mesh: closely placed singularities are induced in the cross field, which are not properly reproducible by vertices in a quad mesh with the prescribed edge length, causing severe distortions or even failure of the meshing algorithm. We reformulate the construction of cross fields as well as field-guided parametrizations in a scale-aware manner which effectively suppresses densely spaced features and noise of geometric as well as topological kind. Dominant large-scale features are adequately preserved in the output by relying on the unaltered input mesh as the computational domain.
Dual Strip Weaving: Interactive Design of Quad Layouts using Elastica Strips

We introduce Dual Strip Weaving, a novel concept for the interactive design of quad layouts, i.e. partitionings of freeform surfaces into quadrilateral patch networks. In contrast to established tools for the design of quad layouts or subdivision base meshes, which are often based on creating individual vertices, edges, and quads, our method takes a more global perspective, operating on a higher level of abstraction: the atomic operation of our method is the creation of an entire cyclic strip, delineating a large number of quad patches at once. The global consistency-preserving nature of this approach reduces demands on the user’s expertise by requiring less advance planning. Efficiency is achieved using a novel method at the heart of our system, which automatically proposes geometrically and topologically suitable strips to the user. Based on this we provide interaction tools to influence the design process to any desired degree and visual guides to support the user in this task.
Interactive Simulation of Rigid Body Dynamics in Computer Graphics
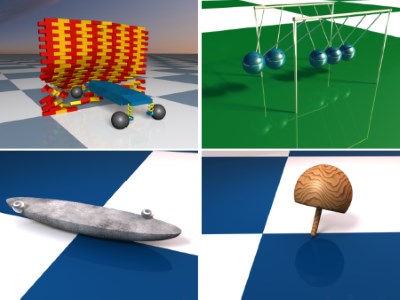
Interactive rigid body simulation is an important part of many modern computer tools, which no authoring tool nor game engine can do without. Such high performance computer tools open up new possibilities for changing how designers, engineers, modelers and animators work with their design problems. This paper is a self contained state-of-the-art report on the physics, the models, the numerical methods and the algorithms used in interactive rigid body simulation all of which have evolved and matured over the past 20 years. Furthermore, the paper communicates the mathematical and theoretical details in a pedagogical manner. This paper is not only a stake in the sand on what has been done, it also seeks to give the reader deeper insights to help guide their future research.
@article{BET2013,
title = "Interactive Simulation of Rigid Body Dynamics in Computer Graphics",
author = "Jan Bender and Kenny Erleben and Jeff Trinkle",
year = {2014},
volume = {33},
pages = {246--270},
number = {1},
journal = {Computer Graphics Forum},
doi = {10.1111/cgf.12272},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/cgf.12272}
}
A Survey on Position-Based Simulation Methods in Computer Graphics

The dynamic simulation of mechanical effects has a long history in computer graphics. The classical methods in this field discretize Newton's second law in a variety of Lagrangian or Eulerian ways, and formulate forces appropriate for each mechanical effect: joints for rigid bodies; stretching, shearing, or bending for deformable bodies; and pressure, or viscosity for fluids, to mention just a few. In the last years the class of position-based methods has become popular in the graphics community. These kinds of methods are fast, stable and controllable which make them well-suited for use in interactive environments. Position-based methods are not as accurate as force-based methods in general but they provide visual plausibility. Therefore, the main application areas of these approaches are virtual reality, computer games and special effects in movies.
This state-of-the-art report covers the large variety of position-based methods that were developed in the field of physically-based simulation. We will introduce the concept of position-based dynamics, present dynamic simulation based on shape matching and discuss data-driven upsampling approaches. Furthermore, we will present several applications for these methods.
@article{BMOTM2014,
title = "A Survey on Position-Based Simulation Methods in Computer Graphics",
author = "Jan Bender and Matthias M{\"{u}}ller and Miguel A. Otaduy and Matthias Teschner and Miles Macklin",
year = {2014},
volume = {33},
pages = {228--251},
number = {6},
journal = {Computer Graphics Forum},
doi = {10.1111/cgf.12346},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/cgf.12346}
}
Real-Time RGB-D based People Detection and Tracking for Mobile Robots and Head-Worn Cameras
We present a real-time RGB-D based multiperson detection and tracking system suitable for mobile robots and head-worn cameras. Our approach combines RGBD visual odometry estimation, region-of-interest processing, ground plane estimation, pedestrian detection, and multihypothesis tracking components into a robust vision system that runs at more than 20fps on a laptop. As object detection is the most expensive component in any such integration, we invest significant effort into taking maximum advantage of the available depth information. In particular, we propose to use two different detectors for different distance ranges. For the close range (up to 5-7m), we present an extremely fast depth-based upper-body detector that allows video-rate system performance on a single CPU core when applied to Kinect sensors. In order to cover also farther distance ranges, we optionally add an appearance-based full-body HOG detector (running on the GPU) that exploits scene geometry to restrict the search space. Our approach can work with both Kinect RGB-D input for indoor settings and with stereo depth input for outdoor scenarios. We quantitatively evaluate our approach on challenging indoor and outdoor sequences and show state-of-the-art performance in a large variety of settings. Our code is publicly available.
Scalable 6-DOF Localization on Mobile Devices
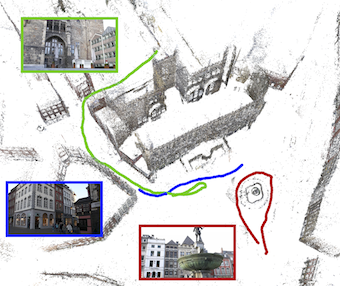
Recent improvements in image-based localization have produced powerful methods that scale up to the massive 3D models emerging from modern Structure-from-Motion techniques. However, these approaches are too resource intensive to run in real-time, let alone to be implemented on mobile devices. In this paper, we propose to combine the scalability of such a global localization system running on a server with the speed and precision of a local pose tracker on a mobile device. Our approach is both scalable and drift-free by design and eliminates the need for loop closure. We propose two strategies to combine the information provided by local tracking and global localization. We evaluate our system on a large-scale dataset of the historic inner city of Aachen where it achieves interactive framerates at a localization error of less than 50cm while using less than 5MB of memory on the mobile device.
The final publication will be available at link.springer.com upon publication.
@inproceedings{middelberg2014eccv,
author = "Middelberg, Sven and Sattler, Torsten and Untzelmann, Ole and Kobbelt, Leif",
title = "{Scalable 6-DOF Localization on Mobile Devices}",
booktitle = "{Proceedings of the 13th European Conference on Computer Vision (ECCV'14)}",
year = 2014
}
Efficient Enforcement of Hard Articulation Constraints in the Presence of Closed Loops and Contacts
In rigid body simulation, one must distinguish between contacts (so-called unilateral constraints) and articulations (bilateral constraints). For contacts and friction, iterative solution methods have proven most useful for interactive applications, often in combination with Shock-Propagation in cases with strong interactions between contacts (such as stacks), prioritizing performance and plausibility over accuracy. For articulation constraints, direct solution methods are preferred, because one can rely on a factorization with linear time complexity for tree-like systems, even in ill-conditioned cases caused by large mass-ratios or high complexity. Despite recent advances, combining the advantages of direct and iterative solution methods wrt. performance has proven difficult and the intricacy of articulations in interactive applications is often limited by the convergence speed of the iterative solution method in the presence of closed kinematic loops (i.e. auxiliary constraints) and contacts. We identify common performance bottlenecks in the dynamic simulation of unilateral and bilateral constraints and are able to present a simulation method, that scales well in the number of constraints even in ill-conditioned cases with frictional contacts, collisions and closed loops in the kinematic graph. For cases where many joints are connected to a single body, we propose a technique to increase the sparsity of the positive definite linear system. A solution to these bottlenecks is presented in this paper to make the simulation of a wider range of mechanisms possible in real-time without extensive parameter tuning.
Adaptive Tetrahedral Meshes for Brittle Fracture Simulation

We present a method for the adaptive simulation of brittle fracture of solid objects based on a novel reversible tetrahedral mesh refinement scheme. The refinement scheme preserves the quality of the input mesh to a large extent, it is solely based on topological operations, and does not alter the boundary, i.e. any geometric feature. Our fracture algorithm successively performs a stress analysis and increases the resolution of the input mesh in regions of high tensile stress. This results in an accurate location of crack origins without the need of a general high resolution mesh which would cause high computational costs throughout the whole simulation. A crack is initiated when the maximum tensile stress exceeds the material strength. The introduced algorithm then proceeds by iteratively recomputing the changed stress state and creating further cracks. Our approach can generate multiple cracks from a single impact but effectively avoids shattering artifacts. Once the tensile stress decreases, the mesh refinement is reversed to increase the performance of the simulation. We demonstrate that our adaptive method is robust, scalable and computes highly realistic fracture results.
@INPROCEEDINGS{Koschier2014,
author = {Dan Koschier and Sebastian Lipponer and Jan Bender},
title = {Adaptive Tetrahedral Meshes for Brittle Fracture Simulation},
booktitle = {Proceedings of the 2014 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2014},
publisher = {Eurographics Association},
location = {Copenhagen, Denmark}
}
Efficient Modal Sound Synthesis on GPUs
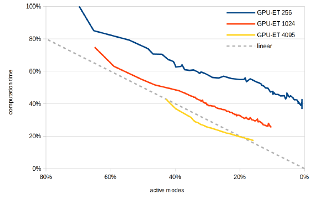
Modal sound synthesis is a useful method to interactively generate sounds for Virtual Environments. Forces acting on objects excite modes, which then have to be accumulated to generate the output sound. Due to the high audio sampling rate, algorithms using the CPU typically can handle only a few actively sounding objects. Additionally, force excitation should be applied at a high sampling rate. We present different algorithms to compute the synthesized sound using a GPU, and compare them to CPU implementations. The GPU algorithms shows a significantly higher performance, and allows many sounding objects simultaneously.
Innovative Mensch-Maschine Schnittstelle für Prüf- und Diagnosesysteme

Bisher wird die Mensch Maschine Schnittstelle (MMS) für Prüf- und Diagnosesoftware für die Automobilindustrie von Drittherstellern für spezifische Prüfprozesse nach uneinheitlichen und unsystematischen Maßgaben erstellt und zusammen mit entsprechender Hardware vermarktet. Anhand einer durchgeführten Vorstudie in 2012 bei einem Automobilhersteller wurde gezeigt, dass diese Maß-gaben leider eher selten die gewünschten Anforderungen an eine menschgerechte und benutzer-freundliche Gestaltung erfüllen. In dieser Arbeit soll anhand einer bekannten Methode neue Anforderungen an die MMS beim Diagnose- und Prüfbereich am Fließband in Hinblick auf Usability und Human Factors untersucht werden.
Quad Layout Embedding via Aligned Parameterization
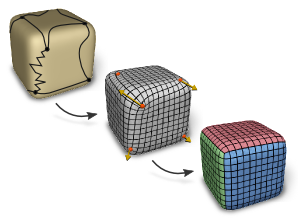
Quad layouting, i.e. the partitioning of a surface into a coarse network of quadrilateral patches, is a fundamental step in application scenarios ranging from animation and simulation to reverse engineering and meshing. This process involves determining the layout's combinatorial structure as well as its geometric embedding in the surface. We present a novel quad layout algorithm that focuses on the embedding optimization, thereby complementing recent methods focusing on the structure optimization aspect. It takes as input a description of the target layout structure and computes a complete embedding in form of a parameterization globally optimized for isometry and, in particular, principal direction alignment. Besides being suited for fully automatic workflows, our method can also incorporate user constraints and support the tedious but common procedure of manual layouting.
Position-Based Simulation of Continuous Materials

We introduce a novel fast and robust simulation method for deformable solids that supports complex physical effects like lateral contraction, anisotropy or elastoplasticity. Our method uses a continuum-based formulation to compute strain and bending energies for two- and three-dimensional bodies. In contrast to previous work, we do not determine forces to reduce these potential energies, instead we use a position-based approach. This combination of a continuum-based formulation with a position-based method enables us to keep the simulation algorithm stable, fast and controllable while providing the ability to simulate complex physical phenomena lacking in former position-based approaches. We demonstrate how to simulate cloth and volumetric bodies with lateral contraction, bending, plasticity as well as anisotropy and proof robustness even in case of degenerate or inverted elements. Due to the continuous material model of our method further physical phenomena like fracture or viscoelasticity can be easily implemented using already existing approaches. Furthermore, a combination with other geometrically motivated methods is possible.
@ARTICLE{Bender2014,
author = {Jan Bender and Dan Koschier and Patrick Charrier and Daniel Weber},
title = {Position-Based Simulation of Continuous Materials},
journal = {Computers \& Graphics },
year = {2014},
volume = {44},
pages = {1 - 10},
number = {0},
doi = {http://dx.doi.org/10.1016/j.cag.2014.07.004},
issn = {0097-8493}
}
Quo Vadis CAVE – Does Immersive Visualization Still Matter?
More than two decades have passed since the introduction of the CAVE (Cave Automatic Virtual Environment), a landmark in the development of VR.1 The CAVE addressed two major issues with head-mounted displays of the era. First, it provided an unprecedented field of view, greatly improving the Feeling of presence in a virtual environment (VE). Second, this feeling was ampli ed because users didn’t have to rely on a virtual representation of their own bodies or parts thereof. Instead, they could physically enter the virtual space. Scientific visualization had been promulgated as a killer app for VR technology almost from day one. With the CAVE’s inception, it became possible to “put users within their data.” Proponents predicted two key advantages. First, immersive VR promised faster, more comprehensive understanding of complex, spatial relationships owing to head-tracked, stereoscopic rendering. Second, it would provide a more natural user interface, specifically for spatial interaction. In a seminal article, Andy van Dam and his colleagues proposed VR-enabled visualization as a midterm solution to the “accelerating data crisis.”2 That is, the ability to generate data had for some time outpaced the ability to analyze it. Over the years, a number of studies have investigated the effects of VR-based visualizations in speci c application scenarios. Recently, Bireswar Laha and his colleagues provided more general, empirical evidence for its bene fits. Although VR and scienti c visualization have matured and many of the original technical limitations have been resolved, immersive visualization has yet to nd the widespread, everyday use that was claimed in the early days. At the same time, the demand for scalable visualization solutions is greater than ever. If anything, the gap between data generation and analysis capabilities has widened even more. So, two questions arise. What should such scalable solutions look like, and what requirements arise regarding the underlying hardware and software and the overall methodology?
Preliminary Bone Sawing Model for a Virtual Reality-Based Training Simulator of Bilateral Sagittal Split Osteotomy
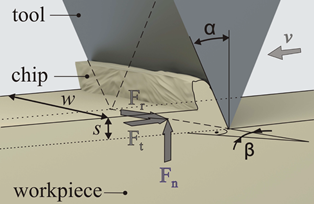
Successful bone sawing requires a high level of skill and experience, which could be gained by the use of Virtual Reality-based simulators. A key aspect of these medical simulators is realistic force feedback. The aim of this paper is to model the bone sawing process in order to develop a valid training simulator for the bilateral sagittal split osteotomy, the most often applied corrective surgery in case of a malposition of the mandible. Bone samples from a human cadaveric mandible were tested using a designed experimental system. Image processing and statistical analysis were used for the selection of four models for the bone sawing process. The results revealed a polynomial dependency between the material removal rate and the applied force. Differences between the three segments of the osteotomy line and between the cortical and cancellous bone were highlighted.
Virtuelle Realität als Gegenstand und Werkzeug der Wissenschaft
Dieser Beitrag stellt die Disziplin der Virtuellen Realität (VR) als eine wichtige Ausprägung von Virtualität vor. Die VR wird als eine spezielle Form der Mensch-Computer-Schnittstelle verstanden, die mehrere menschliche Sinne in die Interaktion einbezieht und beim Benutzer die Illusion hervorruft, eine computergenerierte künstliche Welt als real wahrzunehmen. Der Beitrag zeigt auf, dass umfangreiche Methodenforschung über mehrere Disziplinen hinweg notwendig ist um dieses ultimative Ziel zu erreichen oder ihm zumindest näher zu kommen. Schließlich werden drei unterschiedliche Anwendungen vorgestellt welche demonstrieren, auf welch vielfältige Art und Weise die VR als Werkzeug in den Wissenschaften eingesetzt werden kann.
Reorientation in Virtual Environments using Interactive Portals

Real walking is the most natural method of navigation in virtual environments. However, physical space limitations often prevent or complicate its continuous use. Thus, many real walking interfaces, among them redirected walking techniques, depend on a reorientation technique that redirects the user away from physical boundaries when they are reached. However, existing reorientation techniques typically actively interrupt the user, or depend on the application of rotation gain that can lead to simulator sickness. In our approach, the user is reoriented using portals. While one portal is placed automatically to guide the user to a safe position, she controls the target selection and physically walks through the portal herself to perform the reorientation. In a formal user study we show that the method does not cause additional simulator sickness, and participants walk more than with point-and-fly navigation or teleportation, at the expense of longer completion times.
Best Technote!
@INPROCEEDINGS{freitag2014,
author={S. Freitag and D. Rausch and T. Kuhlen},
booktitle={2014 IEEE Symposium on 3D User Interfaces (3DUI)},
title={{Reorientation in Virtual Environments Using Interactive Portals}},
year={2014},
pages={119-122},
doi={10.1109/3DUI.2014.6798852},
month={March},
}
Advanced Virtual Reality and Visualization Support for Factory Layout Planning
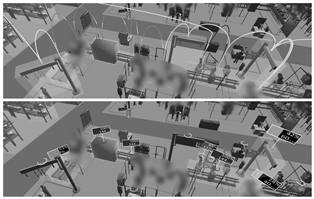
Recently, more and more Virtual Reality (VR) and visualization solutions to support the factory layout planning process have been presented. On the one hand, VR enables planners to create cost-effective virtual prototypes and to perform virtual walkthroughs, e.g., to verify proposed layouts. On the other hand, visualization helps to gain insight into simulation results that, e.g., describe the various interdependencies between machines, such as material flows. In order to create truly effective tools based on VR and visualization, the right techniques have to be chosen and adapted to the specific problem. However, the solutions published so far usually do not exploit these technologies to their full potential.
To address this situation, we present a VR-based planning assistant that offers advanced visualization functionality that furthers the understanding of planning-relevant parameters, while also relying on established techniques. In order to realize a useful approach, the assistant fulfills three central requirements:
- A smooth integration of the assistant into existing workflows is essential in order to not disrupt them. Consequently, existing tools need to be properly integrated and a mechanism for data exchange with these tools has to be provided.
- Visualization is the main means of facilitating insight. Instead of only displaying factory models, advanced techniques to visualize more abstract quantities, like material flows or process chains, have to be provided.
- VR systems vary in the degree of immersion they offer, ranging from non-immersive desktop systems to fully immersive Cave Automatic Virtual Environment (CAVE) systems. Scalability among these systems allows adapting high-end installations as well as cost-effective solutions. However, to ensure good scalability, devising a flexible system abstraction and a unified interaction concept are essential.
The base for our planning assistant is an immersive VR (IVR) system in form of a CAVE. Our solution allows performing virtual walkthroughs and offers additional visualization techniques for planning relevant data.
A 3D Collaborative Virtual Environment to Integrate Immersive Virtual Reality into Factory Planning Processes
In the recent past, efforts have been made to adopt immersive virtual reality (IVR) systems as a means for design reviews in factory layout planning. While several solutions for this scenario have been developed, their integration into existing planning workflows has not been discussed yet. From our own experience of developing such a solution, we conclude that the use of IVR systems-like CAVEs-is rather disruptive to existing workflows. One major reason for this is that IVR systems are not available everywhere due to their high costs and large physical footprint. As a consequence, planners have to travel to sites offering such systems which is especially prohibitive as planners are usually geographically dispersed. In this paper, we present a concept for integrating IVR systems into the factory planning process by means of a 3D collaborative virtual environment (3DCVE) without disrupting the underlying planning workflow. The goal is to combine non-immersive and IVR systems to facilitate collaborative walkthrough sessions. However, this scenario poses unique challenges to interactive collaborative work that to the best of our knowledge have not been addressed so far. In this regard, we discuss approaches to viewpoint sharing, telepointing and annotation support that are geared towards distributed heterogeneous 3DCVEs.
Geometrically Limited Constraints for Physics-based Haptic Rendering

In this paper a single-point haptic rendering technique is proposed which uses a constraint-based physics simulation approach. Geometries are sampled using point shell points, each associated with a small disk, that jointly result in a closed surface for the whole shell. The geometric information is incorporated into the constraint-based simulation using newly introduced geometrically limited contact constraints which are active in a restricted region corresponding to the disks in contact. The usage of disk constraints not only creates closed surfaces, which is important for single-point rendering, but also tackles the problem of over-constraint contact situations in convex geometric setups. Furthermore, an iterative solving scheme for dynamic problems under consideration of the proposed constraint type is proposed. Finally, an evaluation of the simulation approach shows the advantages compared to standard contact constraints regarding the quality of the rendered forces.
Data-flow Oriented Software Framework for the Development of Haptic-enabled Physics Simulations
This paper presents a software framework that supports the development of haptic-enabled physics simulations. The framework provides tools aiming to facilitate a fast prototyping process by utilizing component and flow-oriented architectures, while maintaining the capability to create efficient code which fulfills the performance requirements induced by the target applications. We argue that such a framework should not only ease the creation of prototypes but also help to effectively and efficiently evaluate them. To this end, we provide analysis tools and the possibility to build problem oriented evaluation environments based on the described software concepts. As motivating use case, we present a project with the goal to develop a haptic-enabled medical training simulator for a maxillofacial procedure. With this example, we demonstrate how the described framework can be used to create a simulation architecture for a complex haptic simulation and how the tools assist in the prototyping process.
An Evaluation of a Smart-Phone-Based Menu System for Immersive Virtual Environments

System control is a crucial task for many virtual reality applications and can be realized in a broad variety of ways, whereat the most common way is the use of graphical menus. These are often implemented as part of the virtual environment, but can also be displayed on mobile devices. Until now, many systems and studies have been published on using mobile devices such as personal digital assistants (PDAs) to realize such menu systems. However, most of these systems have been proposed way before smartphones existed and evolved to everyday companions for many people. Thus, it is worthwhile to evaluate the applicability of modern smartphones as carrier of menu systems for immersive virtual environments. To do so, we implemented a platform-independent menu system for smartphones and evaluated it in two different ways. First, we performed an expert review in order to identify potential design flaws and to test the applicability of the approach for demonstrations of VR applications from a demonstrator's point of view. Second, we conducted a user study with 21 participants to test user acceptance of the menu system. The results of the two studies were contradictory: while experts appreciated the system very much, user acceptance was lower than expected. From these results we could draw conclusions on how smartphones should be used to realize system control in virtual environments and we could identify connecting factors for future research on the topic.
Integration of VR and Visualization Tools to Foster the Factory Planning Process
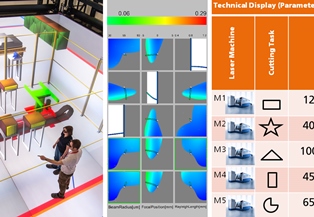
Recently, virtual reality (VR) and visualization have been increasingly employed to facilitate various tasks in factory planning processes. One major challenge in this context lies in the exchange of information between expert groups concerned with distinct planning tasks in order to make planners aware of inter-dependencies. For example, changes to the configuration of individual machines can have an effect on the overall production performance and vice versa. To this end, we developed VR- and visualization-based planning tools for two distinct planning tasks for which we present an integration concept that facilitates information exchange between these tools. The first application's goal is to facilitate layout planning by means of a CAVE system. The high degree of immersion offered by this system allows users to judge spatial relations in entire factories through cost-effective virtual walkthroughs. Additionally, information like material flow data can be visualized within the virtual environment to further assist planners to comprehensively evaluate the factory layout. Another application focuses on individual machines with the goal to help planners find ideal configurations by providing a visualization solution to explore the multi-dimensional parameter space of a single machine. This is made possible through the use of meta-models of the parameter space that are then visualized by means of the concept of Hyperslice. In this paper we present a concept that shows how these applications can be integrated into one comprehensive planning tool that allows for planning factories while considering factors of different planning levels at the same time. The concept is backed by Virtual Production Intelligence (VPI), which integrates data from different levels of factory processes, while including additional data sources and algorithms to provide further information to be used by the applications. In conclusion, we present an integration concept for VR- and visualization-based software tools that facilitates the communication of interdependencies between different factory planning tasks. As the first steps towards creating a comprehensive factory planning solution, we demonstrate the integration of the aforementioned two use-cases by applying VPI. Finally, we review the proposed concept by discussing its benefits and pointing out potential implementation pitfalls.
An Unusual Linker and an Unexpected Node: CaCl2 Dumbbells Linked by Proline to Form Square Lattice Networks
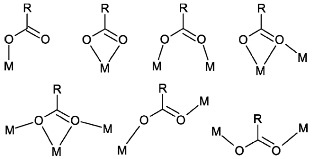
Four new structures based on CaCl2 and proline are reported, all with an unusual Cl–Ca–Cl moiety. Depending on the stoichiometry and the chirality of the amino acid, this metal dihalide fragment represents the core of a mononuclear Ca complex or may be linked by the carboxylate to form extended structures. A cisoid coordination of the halide atoms at the calcium cation is encountered in a chain polymer. In the 2D structures, CaCl2 dumbbells act as nodes and are crosslinked by either enantiomerically pure or racemic proline to form square lattice nets. Extensive database searches and topology tests prove that this structure type is rare for MCl2 dumbbells in general and unprecedented for Ca compounds.Four new structures based on CaCl2 and proline are reported, all with an unusual Cl–Ca–Cl moiety. Depending on the stoichiometry and the chirality of the amino acid, this metal dihalide fragment represents the core of a mononuclear Ca complex or may be linked by the carboxylate to form extended structures. A cisoid coordination of the halide atoms at the calcium cation is encountered in a chain polymer. In the 2D structures, CaCl2 dumbbells act as nodes and are crosslinked by either enantiomerically pure or racemic proline to form square lattice nets. Extensive database searches and topology tests prove that this structure type is rare for MCl2 dumbbells in general and unprecedented for Ca compounds.
@Article{Lamberts2014,
Title = {{An Unusual Linker and an Unexpected Node: CaCl2 Dumbbells Linked by Proline to Form Square Lattice Networks}},
Author = {Lamberts, Kevin and Porsche, Sven and Hentschel, Bernd and Kuhlen, Torsten and Englert, Ulli},
Journal = {CrystEngComm},
Year = {2014},
Pages = {3305-3311},
Volume = {16},
Doi = {10.1039/C3CE42357C},
Issue = {16},
Publisher = {The Royal Society of Chemistry},
Url = {http://dx.doi.org/10.1039/C3CE42357C}
}
The Human Brain Project - Chances and Challenges for Cognitive Systems
The Human Brain Project is one of the largest scientific initiatives dedicated to the research of the human brain worldwide. Over 80 research groups from a broad variety of scientific areas, such as neuroscience, simulation science, high performance computing, robotics, and visualization work together in this European research initiative. This work at hand will identify certain chances and challenges for cognitive systems engineering resulting from the HBP research activities. Beside the main goal of the HBP gathering deeper insights into the structure and function of the human brain, cognitive system research can directly benefit from the creation of cognitive architectures, the simulation of neural networks, and the application of these in context of (neuro-)robotics. Nevertheless, challenges arise regarding the utilization and transformation of these research results for cognitive systems, which will be discussed in this paper. Tools necessary to cope with these challenges are visualization techniques helping to understand and gain insights into complex data. Therefore, this paper presents a set of visualization techniques developed at the Virtual Reality Group at the RWTH Aachen University.
@inproceedings{Weyers2014,
author = {Weyers, Benjamin and Nowke, Christian and H{\"{a}}nel, Claudia and Zielasko, Daniel and Hentschel, Bernd and Kuhlen, Torsten},
booktitle = {Workshop Kognitive Systeme: Mensch, Teams, Systeme und Automaten},
title = {{The Human Brain Project – Chances and Challenges for Cognitive Systems}},
year = {2014}
}
Exploring the Usefulness of Two Variants of Gaze-Guiding-Based Dynamic Job Aid For Performing a Fixed Sequence Start Up Procedure After Longer Periods of Non-Use
Start-up procedures are non-routine tasks in process control, which are prone to skill decay. To mitigate skill decay, job performance aids (JPA) are used. A dynamic JPA was developed for the human-computer interface, which guides the gaze of the user by visual cues. Two gaze-guiding applications (spotlight, spotlight plus integration of information) were tested in terms of their impact in supporting the start-up performance after a three-week and six-month period of non-use (N = 46). Irrespective of the gaze-guiding format, participants with three weeks of non-use outperform participants with six months of non-use. Results show that the best indicator of skill loss is the length of the period of non-use. It is assumed that the advantage of gaze guiding plus integration of information was not shown due to the loss of interface-operating knowledge. In conclusion, gaze guiding for long periods of non-use needs to be accompanied by interface-operating knowledge.
Lattice-extended Coloured Petri Net Rewriting for Adaptable User Interface Models
Adaptable user interfaces (UI) have shown a great variety of advantages in human computer interaction compared to classic UI designs. We show how adaptable UIs can be built by introducing coloured Petri nets to connect the UI’s physical representation with the system to be controlled. UI development benefits from formal modelling approaches regarding the derived close integration of creation, execution, and reconfiguration of formal UI models. Thus, adaptation does not only change the physical representation, but also the connecting Petri net. For the latter transformation, we enhance the DPO rewriting formalism by using an order on the set of labels and softening the label-preserving property of morphisms, i.e., an element can also be mapped to another element if the label is larger. We use lattices to ensure correctness and state application conditions of rewriting steps. Finally we define an order compatible with our framework for the use in our implementation.
Interactive Volume Rendering for Immersive Virtual Environments
Immersive virtual environments (IVEs) are an appropriate platform for 3D data visualization and exploration as, for example, the spatial understanding of these data is facilitated by stereo technology. However, in comparison to desktop setups a lower latency and thus a higher frame rate is mandatory. In this paper we argue that current realizations of direct volume rendering do not allow for a desirable visualization w.r.t. latency and visual quality that do not impair the immersion in virtual environments. To this end, we analyze published acceleration techniques and discuss their potential in IVEs; furthermore, head tracking is considered as a main challenge but also a starting point for specific optimization techniques.
@inproceedings{Hanel2014,
author = {H{\"{a}}nel, Claudia and Weyers, Benjamin and Hentschel, Bernd and Kuhlen, Torsten W.},
booktitle = {IEEE VIS International Workshop on 3DVis: Does 3D really make sense for Data Visualization?},
title = {{Interactive Volume Rendering for Immersive Virtual Environments}},
year = {2014}
}
Zometool Shape Approximation
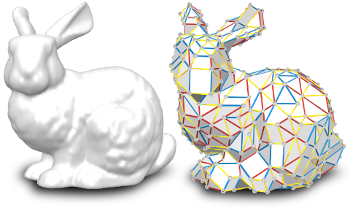
We present an algorithm that approximates 2-manifold surfaces with Zometool models while preserving their topology. Zometool is a~popular hands-on mathematical modeling system used in teaching, research and for recreational model assemblies at home. This construction system relies on a single node type with a small, fixed set of directions and only 9 different edge types in its basic form. While being naturally well suited for modeling symmetries, various polytopes or visualizing molecular structures, the inherent discreteness of the system poses difficult constraints on any algorithmic approach to support the modeling of freeform shapes. We contribute a set of local, topology preserving Zome mesh modification operators enabling the efficient exploration of the space of 2-manifold Zome models around a given input shape. Starting from a rough initial approximation, the operators are iteratively selected within a stochastic framework guided by an energy functional measuring the quality of the approximation. We demonstrate our approach on a number of designs and also describe parameters which are used to explore different complexities and enable coarse approximations.
Interactive Volume-Based Visualization and Exploration for Diffusion Fiber Tracking
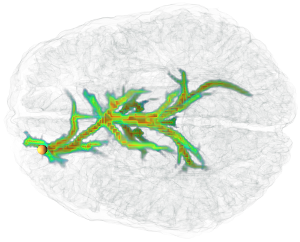
We present a new method to interactively compute and visualize fiber bundles extracted from a diffusion magnetic resonance image. It uses Dijkstra's shortest path algorithm to find globally optimal pathways from a given seed to all other voxels. Our distance function enables Dijkstra to generalize to larger voxel neighborhoods, resulting in fewer quantization artifacts of the orientations, while the shortest paths are still efficiently computable. Our volumetric fiber representation enables the usage of volume rendering techniques. Therefore no complicated pruning or analysis of the resulting fiber tree is needed in order to visualize important fibers. In fact, this can efficiently be done by changing a transfer function. Our application is highly interactive, allowing the user to focus completely on the exploration of the data.
Position-Based Rigid Body Dynamics
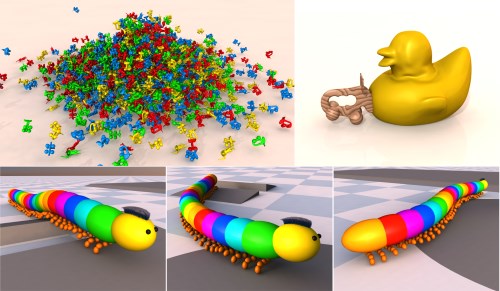
We propose a position-based approach for large-scale simulations of rigid bodies at interactive frame-rates. Our method solves positional constraints between rigid bodies and therefore integrates nicely with other position-based methods. Interaction of particles and rigid bodies through common constraints enables two-way coupling with deformables. The method exhibits exceptional performance and stability while being user-controllable and easy to implement. Various results demonstrate the practicability of our method for the resolution of collisions, contacts, stacking and joint constraints.
@ARTICLE{Deul2014,
author = {Deul, Crispin and Charrier, Patrick and Bender, Jan},
title = {Position-Based Rigid Body Dynamics},
journal = {Computer Animation and Virtual Worlds},
year = {2014},
doi = {10.1002/cav.1614},
issn = {1546-427X},
volume = {27},
number = {2},
pages = {103--112},
keywords = {real time, rigid-body dynamics, two-way coupling, position-based dynamics},
publisher = {John Wiley \& Sons, Ltd},
url = {http://dx.doi.org/10.1002/cav.1614}
}
Efficient Self-Shadowing Using Image-Based Lighting on Glossy Surfaces

In this paper we present a novel natural illumination approach for real-time rasterization-based rendering with environment map-based high dynamic range lighting. Our approach allows to use all kinds of glossiness values for surfaces, ranging continuously from completely diffuse up to mirror-like glossiness. This is achieved by combining cosine-based diffuse, glossy and mirror reflection models in one single lighting model. We approximate this model by filter functions, which are applied to the environment map. This results in a fast, image-based lookup for the different glossiness values which gives our technique the high performance that is necessary for real-time rendering. In contrast to existing real-time rasterization-based natural illumination techniques, our method has the capability of handling high gloss surfaces with directional self-occlusion. While previous works exchange the environment map by virtual point light sources in the whole lighting and shadow computation, we keep the full image information of the environment map in the lighting process and only use virtual point light sources for the shadow computation. Our technique was developed for the usage in real-time virtual prototyping systems for garments since here typically a small scene is lit by a large environment which fulfills the requirements for image-based lighting. In this application area high performance rendering techniques for dynamic scenes are essential since a physical simulation is usually running in parallel on the same machine. However, also other applications can benefit from our approach.
@inproceedings{Knuth2014,
author = {Martin Knuth and Christian Altenhofen and Arjan Kuijper and Jan Bender},
title = {Efficient Self-Shadowing Using Image-Based Lighting on Glossy Surfaces},
editor = {Jan Bender and Arjan Kuijper and Tatiana von Landesberger and Holger Theisel and Philipp Urban},
booktitle = {VMV 2014: Vision, Modeling & Visualization},
year = {2014},
publisher = {Eurographics Association}
}
Visualization of Memory Access Behavior on Hierarchical NUMA Architectures
The available memory bandwidth of existing high performance computing platforms turns out as being more and more the limitation to various applications. Therefore, modern microarchitectures integrate the memory controller on the processor chip, which leads to a non-uniform memory access behavior of such systems. This access behavior in turn entails major challenges in the development of shared memory parallel applications. An improperly implemented memory access functionality results in a bad ratio between local and remote memory access, and causes low performance on such architectures. To address this problem, the developers of such applications rely on tools to make these kinds of performance problems visible. This work presents a new tool for the visualization of performance data of the non-uniform memory access behavior. Because of the visual design of the tool, the developer is able to judge the severity of remote memory access in a time-dependent simulation, which is currently not possible using existing tools.
User Interface Design for Test and Diagnosis Software in Automotive Production Environments
In this paper, we present a first approach to a new test and diagnosis user interface (TDUI) as an application scenario for ambient intelligent systems in production environments, which represents one specific domain for urban areas. This method is based on a first evaluation study in 2012, identifying relevant requirements for the development of such TDUIs. It is planned to be implemented based on a formally defined Interaction Logic Layer (ILL), which connects the physical user interface layout with the test system. It allows the user to easily control and adapt the test and diagnosis application, to display and convey information characterizing the process state. Finally, this approach makes the TDUI implementation highly flexible and adaptive regarding the individual user and the requirements of the production environment.
Smart Museums–Exploiting Generative Virtual Museums
This paper describes a metadata-based tour recommendation approach for on-site museum and outdoor visits. Recommendations are calculated utilizing spatial exhibit distribution, museum layout, user and navigation profiles, additional constraints as well as art work descriptors. We propose a service-oriented architecture for generating 3D virtual museums as well as a WebSocket layer to process sensor data during the museum visit.
Towards an Evaluation of a Metadata Standard for Generative Virtual Museums
A methodology for evaluating the ViMCOX metadata format for designing virtual museums is discussed. Two evaluation approaches are presented, addressing (1) design aspects of virtual museums, the completeness of the metadata from the visitor’s point of view as well as measuring the acceptance of virtual museums and (2) a qualitative survey in collaboration with museum experts to identify metadata requirements and feature sets for curator tool implementations.
The Role of Assistive Technologies for Older Adults in Urban Areas
Research in the field of Ambient Assisted Living (AAL) introduces assistive technologies in various contexts, e.g., medical applications for clinics, or activities in home environments. Assistive technologies have the potential to help prevent isolation and lack of social support arising from a growing number of older adults living in single person households in urban areas. In order to examine the role of such technologies and identify challenges and potentials of systems and services, we investigated existing literature of the past decade. Whereas many contributions support the individual user or social connection, only few integrate location-based information or urban structures. Future research is confronted with a multitude of challenges, e.g. considering network technologies, market uptake or adaptation, and potentials, e.g. the support or establishing of social neighborhood structures. This literature review contributes in achieving an overview of the state of the art and research areas that will draw an increasing focus according to demographic change.
Creation of Adaptive User Interfaces Through Reconfiguration of User Interface Models Using an Algorithmic Rule Generation Approach
Inefficient and error-prone interaction between human operators and technical systems was the reason for various catastrophic accidents in the past. User interfaces implement the communication between a human user and a technical system which is the reason why inaccurate design of user interfaces has been identified as one major factor for those errors. The use of adaptive user interfaces is one possible solution to reduce inefficient interaction by adapting the user interface to a specific user, task, or context. However, currently no self-contained formal approach exists that allows for the creation of adaptive user interfaces despite various advantages of formal methods: interaction becomes verifiable, formal methods close the gap between modeling and implementation by using executable formal languages, and they allow for using existing rewriting concepts making formal models adaptable. This paper introduces a new approach to a formal rule generation concept, which enables a flexible creation of adaptive user interfaces. This concept is based on a formal modeling and reconfiguration approach for the creation and adaptation of user interfaces. The applicability of this approach will be shown through an implementation of an adaptive user interface for adaptive automation. The main contribution of the presented work is a new concept for rule generation that is capable of adapting formally modeled user interfaces.
Zometool Rationalization of Freeform Surfaces
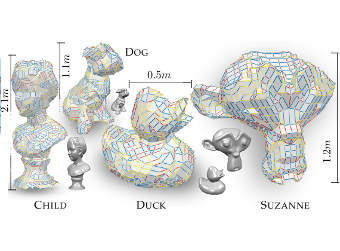
An ever broader availability of freeform designs together with an increasing demand for product customization has lead to a rising interest in efficient physical realization of such designs, the trend toward personal fabrication. Not only large-scale architectural applications are (becoming increasingly) popular but also different consumer-level rapid-prototyping applications, including toy and 3D puzzle creation. In this work we present a method for do-it-yourself reproduction of freeform designs without the typical limitation of state-of-the-art approaches requiring manufacturing custom parts using semi-professional laser cutters or 3d printers. Our idea is based on a popular mathematical modeling system (Zometool) commonly used for modeling higher dimensional polyhedra and symmetric structures such as molecules and crystal lattices. The proposed method extends the scope of Zometool modeling to freeform, disk-topology surfaces. While being an efficient construction system on the one hand (consisting only of a single node type and 9 different edge types), this inherent discreteness of the Zometool system, on the other hand gives rise to a hard approximation problem. We base our method on a marching front approach, where elements are not added in a greedy sense, but rather whole regions on the front are filled optimally, using a set of problem specific heuristics to keep complexity under control.
Poster: Visualizing Geothermal Simulation Data with Uncertainty
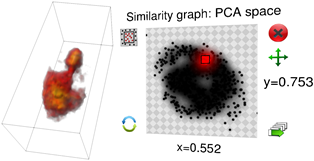
Simulations of geothermal reservoirs inherently contain uncertainty due to the fact that the underlying physical models are created from sparse data. Moreover, this uncertainty often cannot be completely expressed by simple key measures (e.g., mean and standard deviation), as the distribution of possible values is often not unimodal. Nevertheless, existing visualizations of these simulation data often completely neglect displaying the uncertainty, or are limited to a mean/variance representation. We present an approach to visualize geothermal simulation data that deals with both cases: scalar uncertainties as well as general ensembles of data sets. Users can interactively define two-dimensional transfer functions to visualize data and uncertainty values directly, or browse a 2D scatter plot representation to explore different possibilities in an ensemble.
Poster: Guided Tour Creation in Immersive Virtual Environments

Guided tours have been found to be a good approach to introducing users to previously unknown virtual environments and to allowing them access to relevant points of interest. Two important tasks during the creation of guided tours are the definition of views onto relevant information and their arrangement into an order in which they are to be visited. To allow a maximum of flexibility an interactive approach to these tasks is desirable. To this end, we present and evaluate two approaches to the mentioned interaction tasks in this paper. The first approach is a hybrid 2D/3D interaction metaphor in which a tracked tablet PC is used as a virtual digital camera that allows to specify and order views onto the scene. The second one is a purely 3D version of the first one, which does not require a tablet PC. Both approaches were compared in an initial user study, whose results indicate a superiority of the 3D over the hybrid approach.
@InProceedings{Pick2014,
Title = {{P}oster: {G}uided {T}our {C}reation in {I}mmersive {V}irtual {E}nvironments},
Author = {Sebastian Pick and Andreas B\"{o}nsch and Irene Tedjo-Palczynski and Bernd Hentschel and Torsten Kuhlen},
Booktitle = {IEEE Symposium on 3D User Interfaces (3DUI), 2014},
Year = {2014},
Month = {March},
Pages = {151-152},
Doi = {10.1109/3DUI.2014.6798865},
Url = {http://ieeexplore.ieee.org/xpl/abstractReferences.jsp?arnumber=6798865}
}
Poster: Interactive 3D Force-Directed Edge Bundling on Clustered Edges
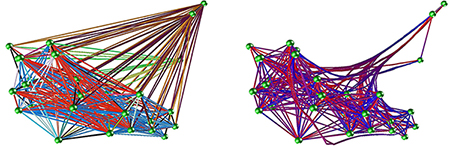
Graphs play an important role in data analysis. Especially, graphs with a natural spatial embedding can benefit from a 3D visualization. But even more then in 2D, graphs visualized as intuitively readable 3D node-link diagrams can become very cluttered. This makes graph exploration and data analysis difficult. For this reason, we focus on the challenge of reducing edge clutter by utilizing edge bundling. In this paper we introduce a parallel, edge cluster based accelerator for the force-directed edge bundling algorithm presented in [Holten2009]. This opens up the possibility for user interaction during and after both the clustering and the bundling.
Interactive Definition of Discrete Color Maps for Volume Rendered Data in Immersive Virtual Environments
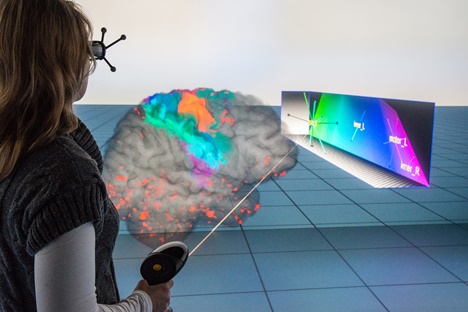
The visual discrimination of different structures in one or multiple combined volume data sets is generally done with individual transfer functions that can usually be adapted interactively. Immersive virtual environments support the depth perception and thus the spatial orientation in these volume visualizations. However, complex 2D menus for elaborate transfer function design cannot be easily integrated. We therefore present an approach for changing the color mapping during volume exploration with direct volume interaction and an additional 3D widget. In this way we incorporate the modification of a color mapping for a large number of discretely labeled brain areas in an intuitive way into the virtual environment. We use our approach for the analysis of a patient’s data with a brain tissue degenerating disease to allow for an interactive analysis of affected regions.
@inproceedings{Hanel2014a,
address = {Minneapolis},
author = {H{\"{a}}nel, Claudia and Freitag, Sebastian and Hentschel, Bernd and Kuhlen, Torsten},
booktitle = {2nd International Workshop on Immersive Volumetric Interaction (WIVI 2014) at IEEE Virtual Reality 2014},
editor = {Banic, Amy and O'Leary, Patrick and Laha, Bireswar},
title = {{Interactive Definition of Discrete Color Maps for Volume Rendered Data in Immersive Virtual Environments}},
year = {2014}
}
On The Impact of Spatial Heterogeneous Permeability Distributions on the Development of Free Convection Cells in the Perth Basin, Australia
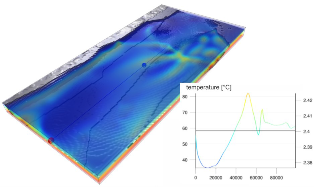
When dealing with free convection in a geothermal reservoir, it is preferable to detect regions of up flow, which locally increase the geothermal gradient. Free convection cells are likely to be found in a large reservoir layer (Yarragadee Aquifer), which is encountered in the entire Perth Basin, including the Perth Metropolitan Area (PMA). While the knowledge about the structure of the Perth Basin has been improved recently, the heterogeneity and spatial complexity of permeability was up till now mainly neglected. We set up a refined structural model of about 5000 km² comprising the region around the city of Perth up to a depth of 4.5 km, using an implicit modelling approach (3D GeoModeller by Intrepid Geophysics ). Based on the structural model we create a discretized numerical model for simulating fluid flow and heat transport in the Yarragadee Aquifer considering spatial heterogeneity of porosity and permeability. This heterogeneity is assessed by designing three different test cases: 1) constant porosity and permeability for the entire aquifer; 2) porosity and permeability decreasing with depth; 3) a conditional random permeability field within prescribed limits and for given correlation length. We calibrate a poro-perm relationship based on a fractal approach to the Yarragadee Aquifer, using over 100 measurement pairs of porosity and permeability from three boreholes. This data was also used for calibrating porosity decrease with depth, following Athy’s law. For the model with constant porosity and permeability, convection cells vary in size between 4 km and 6 km. Simulations with depth dependent decrease in porosity and permeability yielded a transition from conductive to convective heat transport in the Yarragadee Aquifer at a threshold permeability of around 1.7 × 10-15 m². There convection cells are much smaller, at the scale of 2.4 km to 3 km. Stochastic distributions of porosity and permeability in the Yarragadee cause the formation of convection cells to adjust to the permeability field, yielding a less distinct convection pattern. Where the Yarragadee Aquifer is in contact with overlying aquifers, stable regions of down flow develop. These in turn have a strong impact on the regional flow field and therefore on the temperature distribution. Temperatures drop to about 40 °C in 2 km depth. In order to improve the reliability of the model, as well as identification and comparison of convection cells in different simulations, we are developing a specialized visualization tool tailored to this purpose. By using tools like particle tracing and direct volume rendering, the recognition of the spatial distribution of convection cells and their change in the different cases facilitated.
Software Phantom with Realistic Speckle Modeling for Validation of Image Analysis Methods in Echocardiography
Computer-assisted processing and interpretation of medical ultrasound images is one of the most challenging tasks within image analysis. Physical phenomena in ultrasonographic images, e.g., the characteristic speckle noise and shadowing effects, make the majority of standard methods from image analysis non optimal. Furthermore, validation of adapted computer vision methods proves to be difficult due to missing ground truth information. There is no widely accepted software phantom in the community and existing software phantoms are not flexible enough to support the use of specific speckle models for different tissue types, e.g., muscle and fat tissue. In this work we propose an anatomical software phantom with a realistic speckle pattern simulation to fill this gap and provide a flexible tool for validation purposes in medical ultrasound image analysis. We discuss the generation of speckle patterns and perform statistical analysis of the simulated textures to obtain quantitative measures of the realism and accuracy regarding the resulting textures.
Interactive 3D Visualization of Structural Changes in the Brain of a Person With Corticobasal Syndrome
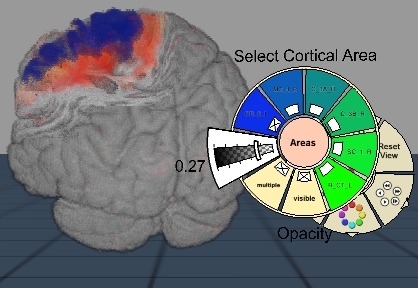
The visualization of the progression of brain tissue loss in neurodegenerative diseases like corticobasal syndrome (CBS) can provide not only information about the localization and distribution of the volume loss, but also helps to understand the course and the causes of this neurodegenerative disorder. The visualization of such medical imaging data is often based on 2D sections, because they show both internal and external structures in one image. Spatial information, however, is lost. 3D visualization of imaging data is capable to solve this problem, but it faces the difficulty that more internally located structures may be occluded by structures near the surface. Here, we present an application with two designs for the 3D visualization of the human brain to address these challenges. In the first design, brain anatomy is displayed semi-transparently; it is supplemented by an anatomical section and cortical areas for spatial orientation, and the volumetric data of volume loss. The second design is guided by the principle of importance-driven volume rendering: A direct line-of-sight to the relevant structures in the deeper parts of the brain is provided by cutting out a frustum-like piece of brain tissue. The application was developed to run in both, standard desktop environments and in immersive virtual reality environments with stereoscopic viewing for improving the depth perception. We conclude that the presented application facilitates the perception of the extent of brain degeneration with respect to its localization and affected regions.
@article{Hanel2014b,
author = {H{\"{a}}nel, Claudia and Pieperhoff, Peter and Hentschel, Bernd and Amunts, Katrin and Kuhlen, Torsten},
issn = {1662-5196},
journal = {Frontiers in Neuroinformatics},
number = {42},
pmid = {24847243},
title = {{Interactive 3D visualization of structural changes in the brain of a person with corticobasal syndrome.}},
url = {http://journal.frontiersin.org/article/10.3389/fninf.2014.00042/abstract},
volume = {8},
year = {2014}
}
Dynamiksimulation in der Computergraphik
Die physikalisch-basierte Simulation von Starrkörpern und deformierbaren Festkörpern ist ein wichtiges und aktuelles Forschungsgebiet in der Computergraphik und ein essentieller Bestandteil in vielen Anwendungen, wie z.B. Virtual Prototyping, Computeranimationen, Spiele, Spezialeffekte in Filmen oder Trainingssimulatoren. Dabei stehen oft interaktive Simulationen im Vordergrund, in denen ein Benutzer in Echtzeit mit den simulierten Körpern interagieren kann. Dadurch werden hohe Anforderungen an die Geschwindigkeit und Stabilität der Simulationsverfahren gestellt.
In dieser Arbeit werden interaktive Simulationsmethoden für Mehrkörpersysteme, Textilien und inkompressible deformierbare Volumenkörper vorgestellt. Außerdem wird gezeigt, wie die Simulation durch den Einsatz GPU-basierter Methoden deutlich beschleunigt werden kann.
@PhdThesis{Bender2014,
type={Habilitation},
author = {Jan Bender},
title = {Dynamiksimulation in der Computergraphik},
school = {Karlsruhe Institute of Technology (KIT), Germany},
year = {2014},
month = jan,
doi = {10.5445/KSP/1000040123}
}
Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images
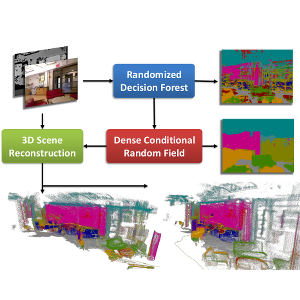
Dense semantic segmentation of 3D point clouds is a challenging task. Many approaches deal with 2D semantic segmentation and can obtain impressive results. With the availability of cheap RGB-D sensors the field of indoor semantic segmentation has seen a lot of progress. Still it remains unclear how to deal with 3D semantic segmentation in the best way. We propose a novel 2D-3D label transfer based on Bayesian updates and dense pairwise 3D Conditional Random Fields. This approach allows us to use 2D semantic segmentations to create a consistent 3D semantic reconstruction of indoor scenes. To this end, we also propose a fast 2D semantic segmentation approach based on Randomized Decision Forests. Furthermore, we show that it is not needed to obtain a semantic segmentation for every frame in a sequence in order to create accurate semantic 3D reconstructions. We evaluate our approach on both NYU Depth datasets and show that we can obtain a significant speed-up compared to other methods.
@inproceedings{Hermans14ICRA,
author = {Alexander Hermans and Georgios Floros and Bastian Leibe},
title = {{Dense 3D Semantic Mapping of Indoor Scenes from RGB-D Images}},
booktitle = {International Conference on Robotics and Automation},
year = {2014}
}
Multiple Target Tracking for Marker-less Augmented Reality
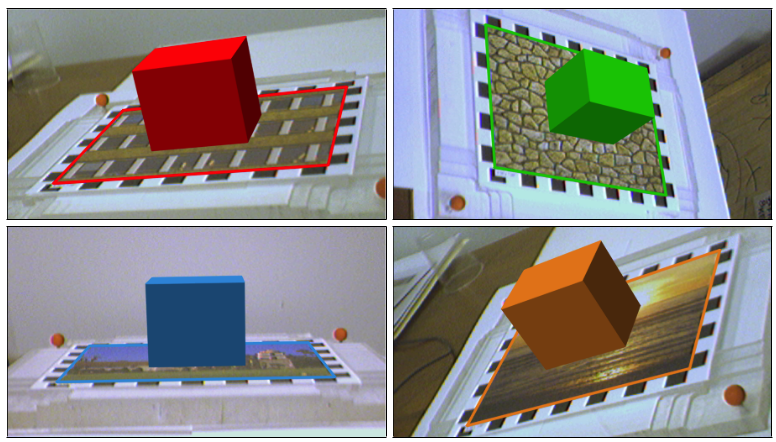
In this work, we implemented an AR framework for planar targets based on the ORB feature-point descriptor. The main components of the framework are a detector, a tracker and a graphical overlay. The detector returns a homography that maps the model- image onto the target in the camera-image. The homography is estimated from a set of feature-point correspondences using the Direct Linear Transform (DLT) algorithm and Levenberg-Marquardt (LM) optimization. The outliers in the set of feature-point correspondences are removed using RANSAC. The tracker is based on the Kalman filter, which applies a consistent dynamic movement on the target. In a hierarchical matching scheme, we extract additional matches from consecutive frames and perspectively transformed model-images, which yields more accurate and jitter-free homography estimations. The graphical overlay computes the six-degree-of-freedom (6DoF) pose from the estimated homography. Finally, to visualize the computed pose, we draw a cube on the surface of the tracked target. In the evaluation part, we analyze the performance of our system by looking at the accuracy of the estimated homography and the ratio of correctly tracked frames. The evaluation is based on the ground truth provided by two datasets. We evaluate most components of the framework under different target movements and lighting conditions. In particular, we proof that our framework is robust against considerable perspective distortion and show the benefit of using the hierarchical matching scheme to minimize jitter and improve accuracy.
A Flexible ASIP Architecture for Connected Components Labeling in Embedded Vision Applications
Real-time identification of connected regions of pixels in large (e.g. FullHD) frames is a mandatory and expensive step in many computer vision applications that are becoming increasingly popular in embedded mobile devices such as smart-phones, tablets and head mounted devices. Standard off-the-shelf embedded processors are not yet able to cope with the performance/flexibility trade-offs required by such applications. Therefore, in this work we present an Application Specific Instruction Set Processor (ASIP) tailored to concurrently execute thresholding, connected components labeling and basic feature extraction of image frames. The proposed architecture is capable to cope with frame complexities ranging from QCIF to FullHD frames with 1 to 4 bytes-per-pixel formats, while achieving an average frame rate of 30 frames-per-second (fps). Synthesis was performed for a standard 65nm CMOS library, obtaining an operating frequency of 350MHz and 2.1mm2 area. Moreover, evaluations were conducted both on typical and synthetic data sets, in order to thoroughly assess the achievable performance. Finally, an entire planar-marker based augmented reality application was developed and simulated for the ASIP.
Universalities in Fundamental Diagrams of Cars, Bicycles and Pedestrians
Since the pioneering work of Greenshields the fundamental diagram is used to characterize and describe the performance of traffic systems. During the last years the discussion and growing data base revealed the influence of human factors, traffic types or ways of measurements on this relation. The manifoldness of influences is important and relevant for applications but moves the discussion away from the main feature characterizing the transport properties of traffic systems. We focus again on the main feature by comparing the fundamental diagram of cars, bicycles and pedestrians moving in a row in a course with periodic boundaries. The underlying data are collected by three experiments, performed under well controlled laboratory conditions. In all experiments the setup in combination with technical equipment or methods of computer vision allowed to determine the trajectories with high precision. The trajectories visualized by space-time diagrams show three different states of motion (free flow state, jammed state and stop-and-go waves) in all these systems. Obviously the values of speed, density and flow of these three systems cover different ranges. However, after a simple rescaling of the velocity by the free speed and of the density by the length of the agents the fundamental diagrams conform regarding the position and height of the capacity. This indicates that the similarities between the systems go deeper than expected and offers the possibility of a universal model for heterogeneous traffic systems.
Universal flow-density relation of single-file bicycle, pedestrian and car motion
The relation between flow and density is an essential quantitative characteristic to describe the efficiency of traffic systems. We have performed experiments with single-file motion of bicycles and compared the results with previous studies for car and pedestrian motion in similar setups. In the space–time diagrams we observe three different states of motion (free flow state, jammed state and stop-and-go waves) in all these systems. Despite their obvious differences they are described by a universal fundamental diagram after proper rescaling of space and time which takes into account the size and free velocity of the three kinds of agents. This indicates that the similarities between the systems go deeper than expected.
Quad Layouts – Generation and Optimization of Conforming Quadrilateral Surface Partitions
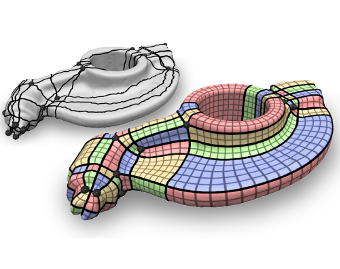
The efficient, computer aided or automatic generation of quad layouts, i.e. the partitioning of an object’s surface into simple networks of conforming quadrilateral patches, is a task that – despite its importance and utility in Computer Graphics and Geometric Modeling – received relatively low attention in the past. As a consequence, this task is most often performed manually by well-trained experts in practice, where quad layouts are of particular interest for surface representation and parameterization tasks. Deeper analysis reveals the inherent complexity of this problem, which might be one of the underlying reasons for this situation. In this thesis we investigate the structure of the problem and the commonly relevant quality criteria. Based on this we develop novel efficient solution strategies and algorithms for the generation of high quality quad layouts. In particular, we present a fully automatic as well as an interactive pipeline for this task. Both are based on splitting the hard problem into sub-problems with a simpler structure each. For each sub-problem we design efficient, custom-tailored optimization algorithms motivated by the geometric nature of these problems. In this process we pay attention to compatibility, such that these algorithms can be applied in sequence, forming the stages of efficient quad layouting pipelines.
Tracking People and Their Objects
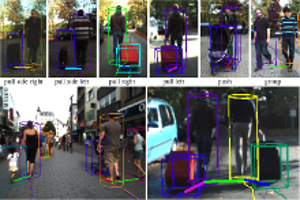
Current pedestrian tracking approaches ignore impor- tant aspects of human behavior. Humans are not moving independently, but they closely interact with their environ- ment, which includes not only other persons, but also dif- ferent scene objects. Typical everyday scenarios include people moving in groups, pushing child strollers, or pulling luggage. In this paper, we propose a probabilistic approach for classifying such person-object interactions, associating objects to persons, and predicting how the interaction will most likely continue. Our approach relies on stereo depth information in order to track all scene objects in 3D, while simultaneously building up their 3D shape models. These models and their relative spatial arrangement are then fed into a probabilistic graphical model which jointly infers pairwise interactions and object classes. The inferred inter- actions can then be used to support tracking by recovering lost object tracks. We evaluate our approach on a novel dataset containing more than 15,000 frames of person- object interactions in 325 video sequences and demonstrate good performance in challenging real-world scenarios.
Integer-Grid Maps for Reliable Quad Meshing
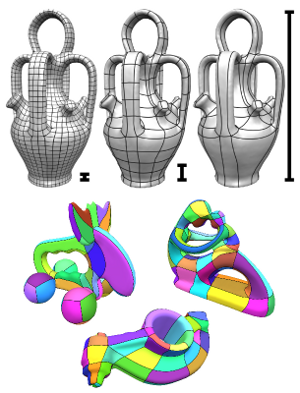
Quadrilateral remeshing approaches based on global parametrization enable many desirable mesh properties. Two of the most important ones are (1) high regularity due to explicit control over irregular vertices and (2) smooth distribution of distortion achieved by convex variational formulations. Apart from these strengths, state-of-the-art techniques suffer from limited reliability on real-world input data, i.e. the determined map might have degeneracies like (local) non-injectivities and consequently often cannot be used directly to generate a quadrilateral mesh. In this paper we propose a novel convex Mixed-Integer Quadratic Programming (MIQP) formulation which ensures by construction that the resulting map is within the class of so called Integer-Grid Maps that are guaranteed to imply a quad mesh. In order to overcome the NP-hardness of MIQP and to be able to remesh typical input geometries in acceptable time we propose two additional problem specific optimizations: a complexity reduction algorithm and singularity separating conditions. While the former decouples the dimension of the MIQP search space from the input complexity of the triangle mesh and thus is able to dramatically speed up the computation without inducing inaccuracies, the latter improves the continuous relaxation, which is crucial for the success of modern MIQP optimizers. Our experiments show that the reliability of the resulting algorithm does not only annihilate the main drawback of parametrization based quad-remeshing but moreover enables the global search for high-quality coarse quad layouts – a difficult task solely tackled by greedy methodologies before.
Multi-View Normal Field Integration for 3D Reconstruction of Mirroring Objects
In this paper, we present a novel, robust multi-view normal field integration technique for reconstructing the full 3D shape of mirroring objects. We employ a turntable-based setup with several cameras and displays. These are used to display illumination patterns which are reflected by the object surface. The pattern information observed in the cameras enables the calculation of individual volumetric normal fields for each combination of camera, display and turntable angle. As the pattern information might be blurred depending on the surface curvature or due to non-perfect mirroring surface characteristics, we locally adapt the decoding to the finest still resolvable pattern resolution. In complex real-world scenarios, the normal fields contain regions without observations due to occlusions and outliers due to interreflections and noise. Therefore, a robust reconstruction using only normal information is challenging. Via a non-parametric clustering of normal hypotheses derived for each point in the scene, we obtain both the most likely local surface normal and a local surface consistency estimate. This information is utilized in an iterative min-cut based variational approach to reconstruct the surface geometry.
Random Forests of Local Experts for Pedestrian Detection
Pedestrian detection is one of the most challenging tasks in computer vision, and has received a lot of attention in the last years. Recently, some authors have shown the advan- tages of using combinations of part/patch-based detectors in order to cope with the large variability of poses and the existence of partial occlusions. In this paper, we propose a pedestrian detection method that efficiently combines mul- tiple local experts by means of a Random Forest ensemble. The proposed method works with rich block-based repre- sentations such as HOG and LBP, in such a way that the same features are reused by the multiple local experts, so that no extra computational cost is needed with respect to a holistic method. Furthermore, we demonstrate how to inte- grate the proposed approach with a cascaded architecture in order to achieve not only high accuracy but also an ac- ceptable efficiency. In particular, the resulting detector op- erates at five frames per second using a laptop machine. We tested the proposed method with well-known challeng- ing datasets such as Caltech, ETH, Daimler, and INRIA. The method proposed in this work consistently ranks among the top performers in all the datasets, being either the best method or having a small difference with the best one.
Discovering Details and Scene Structure with Hierarchical Iconoid Shift
Current landmark recognition engines are typically aimed at recognizing building-scale landmarks, but miss interesting details like portals, statues or windows. This is because they use a flat clustering that summarizes all photos of a building facade in one cluster. We propose Hierarchical Iconoid Shift, a novel landmark clustering algorithm capable of discovering such details. Instead of just a collection of clusters, the output of HIS is a set of dendrograms describing the detail hierarchy of a landmark. HIS is based on the novel Hierarchical Medoid Shift clustering algorithm that performs a continuous mode search over the complete scale space. HMS is completely parameter-free, has the same complexity as Medoid Shift and is easy to parallelize. We evaluate HIS on 800k images of 34 landmarks and show that it can extract an often surprising amount of detail and structure that can be applied, e.g., to provide a mobile user with more detailed information on a landmark or even to extend the landmark’s Wikipedia article.
QEx: Robust Quad Mesh Extraction
The most popular and actively researched class of quad remeshing techniques is
the family of parametrization based quad meshing methods. They all strive
to generate an integer-grid map, i.e. a parametrization of the input surface
into R2 such that the canonical grid of integer iso-lines forms a
quad mesh when mapped back onto the surface in R3. An essential,
albeit broadly neglected aspect of these methods is the quad extraction
step, i.e. the materialization of an actual quad mesh from the mere “quad
texture”. Quad (mesh) extraction is often believed to be a trivial matter but
quite the opposite is true: Numerous special cases, ambiguities induced by
numerical inaccuracies and limited solver precision, as well as imperfections
in the maps produced by most methods (unless costly countermeasures are taken)
pose significant challenges to the quad extractor. We present a method to
sanitize a provided parametrization such that it becomes numerically
consistent even in a limited precision floating point representation. Based
on this we are able to provide a comprehensive and sound description of how to
perform quad extraction robustly and without the need for any complex
tolerance thresholds or disambiguation rules. On top of that we develop a
novel strategy to cope with common local fold-overs in the parametrization.
This allows our method, dubbed QEx, to generate all-quadrilateral meshes
where otherwise holes, non-quad polygons or no output at all would have been
produced. We thus enable the practical use of an entire class of maps that was
previously considered defective. Since state of the art quad meshing methods
spend a significant share of their run time solely to prevent local
fold-overs, using our method it is now possible to obtain quad meshes
significantly quicker than before. We also provide libQEx, an open source
C++ reference implementation of our method and thus significantly lower the
bar to enter the field of quad meshing.
Efficient Computation of Shortest Path-Concavity for 3D Meshes
In the context of shape segmentation and retrieval object-wide distributions of measures are needed to accurately evaluate and compare local regions of shapes. Lien et al. proposed two point-wise concavity measures in the context of Approximate Convex Decompositions of polygons measuring the distance from a point to the polygon’s convex hull: an accurate Shortest Path-Concavity (SPC) measure and a Straight Line-Concavity (SLC) approximation of the same. While both are practicable on 2D shapes, the exponential costs of SPC in 3D makes it inhibitively expensive for a generalization to meshes. In this paper we propose an efficient and straight forward approximation of the Shortest Path-Concavity measure to 3D meshes. Our approximation is based on discretizing the space between mesh and convex hull, thereby reducing the continuous Shortest Path search to an efficiently solvable graph problem. Our approach works out-of-the-box on complex mesh topologies and requires no complicated handling of genus. Besides presenting a rigorous evaluation of our method on a variety of input meshes, we also define an SPC-based Shape Descriptor and show its superior retrieval and runtime performance compared with the recently presented results on the Convexity Distribution by Lian et al.
Polygon Mesh Repairing: An Application Perspective
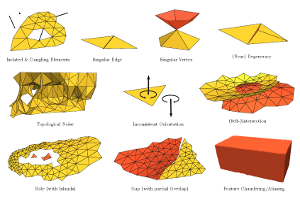
Nowadays, digital 3D models are in widespread and ubiquitous use, and each specific application dealing with 3D geometry has its own quality requirements that restrict the class of acceptable and supported models. This article analyzes typical defects that make a 3D model unsuitable for key application contexts, and surveys existing algorithms that process, repair, and improve its structure, geometry, and topology to make it appropriate to case-by-case requirements. The analysis is focused on polygon meshes, which constitute by far the most common 3D object representation. In particular, this article provides a structured overview of mesh repairing techniques from the point of view of the application context. Di fferent types of mesh defects are classified according to the upstream application that produced the mesh, whereas mesh quality requirements are grouped by representative sets of downstream applications where the mesh is to be used. The numerous mesh repair methods that have been proposed during the last two decades are analyzed and classified in terms of their capabilities, properties, and guarantees. Based on these classifications, guidelines can be derived to support the identification of repairing algorithms best-suited to bridge the compatibility gap between the quality provided by the upstream process and the quality required by the downstream applications in a given geometry processing scenario.
Efficient GPU data structures and methods to solve sparse linear systems in dynamics applications

We present graphics processing unit (GPU) data structures and algorithms to efficiently solve sparse linear systems that are typically required in simulations of multi-body systems and deformable bodies. Thereby, we introduce an efficient sparse matrix data structure that can handle arbitrary sparsity patterns and outperforms current state-of-the-art implementations for sparse matrix vector multiplication. Moreover, an efficient method to construct global matrices on the GPU is presented where hundreds of thousands of individual element contributions are assembled in a few milliseconds. A finite-element-based method for the simulation of deformable solids as well as an impulse-based method for rigid bodies are introduced in order to demonstrate the advantages of the novel data structures and algorithms. These applications share the characteristic that a major computational effort consists of building and solving systems of linear equations in every time step. Our solving method results in a speed-up factor of up to 13 in comparison to other GPU methods.
@article{WebBenSchStoFel13,
author = {Weber, Daniel and Bender, Jan and Schnoes, Markus and Stork, Andr{\'e} and Fellner, Dieter},
title = {Efficient {GPU} Data Structures and Methods to Solve Sparse Linear Systems in Dynamics Applications},
year = {2013},
journal = {Computer Graphics Forum},
volume = {32},
number = {1},
publisher = {Blackwell Publishing Ltd},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/j.1467-8659.2012.03227.x},
doi = {10.1111/j.1467-8659.2012.03227.x},
pages = {16--26},
}
OpenStreetSLAM: Global Vehicle Localization Using OpenStreetMaps
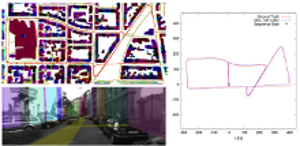
In this paper we propose an approach for global vehicle localization that combines visual odometry with map information from OpenStreetMaps to provide robust and accurate estimates for the vehicle’s position. The main contribution of this work comes from the incorporation of the map data as an additional cue into the observation model of a Monte Carlo Localization framework. The resulting approach is able to compensate for the drift that visual odometry accumulates over time, significantly improving localization quality. As our results indicate, the proposed approach outperforms current state-ofthe- art visual odometry approaches, indicating in parallel the potential that map data can bring to the global localization task.
View-Dependent Realtime Rendering of Procedural Facades with High Geometric Detail
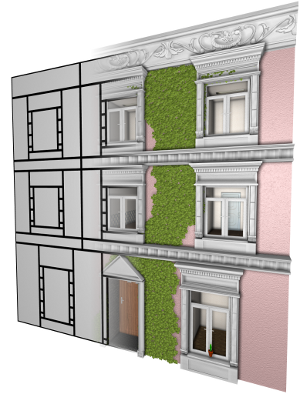
We present an algorithm for realtime rendering of large-scale city models with procedurally generated facades. By using highly detailed assets like windows, doors, and decoration such city models can provide an extremely high geometric level of detail but on the downside they also consist of billions of polygons which makes it infeasible to even store them as explicit polygonal meshes. Moreover, when rendering urban scenes usually only a very small fraction of the city is actually visible which calls for effective culling mechanisms. For procedural textures there are efficient screen space techniques that evaluate, e.g., a split grammar on a per-pixel basis in the fragment shader and thus render a textured facade in a view dependent manner. We take this idea further by introducing 3D geometric detail in addition to flat textures. Our approach is a two-pass procedure that first renders a flat procedural facade. During rasterization the fragment shader triggers the instantiation of a detailed asset whenever a geometric facade element is potentially visible. The set of instantiated detail models are then rendered in a second pass. The major challenges arise from the fact that geometric details belonging to a facade can be visible even if the base polygon of the facade itself is not visible. Hence we propose measures to conservatively estimate visibility without introducing excessive redundancy. We further extend our technique by a simple level of detail mechanism that switches to baked textures (of the assets) depending on the distance to the camera. We demonstrate that our technique achieves realtime frame rates for large-scale city models with massive detail on current commodity graphics hardware.
Position-based Methods for the Simulation of Solid Objects in Computer Graphics

The dynamic simulation of solids has a long history in computer graphics. The classical methods in this field are based on the use of forces or impulses to simulate joints between rigid bodies as well as the stretching, shearing and bending stiffness of deformable objects. In the last years the class of position-based methods has become popular in the graphics community. These kinds of methods are fast, unconditionally stable and controllable which make them well-suited for the use in interactive environments. Position-based methods are not as accurate as force based methods in general but they provide visual plausibility. Therefore, the main application areas of these approaches are virtual reality, computer games and special effects in movies.
This state of the art report covers the large variety of position-based methods that were developed in the field of deformable solids. We will introduce the concept of position-based dynamics, present dynamic simulation based on shape matching and discuss data-driven approaches. Furthermore, we will present several applications for these methods.
@inproceedings{BMOT2013,
title = "Position-based Methods for the Simulation of Solid Objects in Computer Graphics",
author = "Jan Bender and Matthias M{\"u}ller and Miguel A. Otaduy and Matthias Teschner",
year = "2013",
booktitle = "EUROGRAPHICS 2013 State of the Art Reports",
publisher = "Eurographics Association",
location = "Girona, Spain"
}
Practical Anisotropic Geodesy

The computation of intrinsic, geodesic distances and geodesic paths on surfaces is a fundamental low-level building block in countless Computer Graphics and Geometry Processing applications. This demand led to the development of numerous algorithms – some for the exact, others for the approximative computation, some focussing on speed, others providing strict guarantees. Most of these methods are designed for computing distances according to the standard Riemannian metric induced by the surface’s embedding in Euclidean space. Generalization to other, especially anisotropic, metrics – which more recently gained interest in several application areas – is not rarely hampered by fundamental problems. We explore and discuss possibilities for the generalization and extension of well-known methods to the anisotropic case, evaluate their relative performance in terms of accuracy and speed, and propose a novel algorithm, the Short-Term Vector Dijkstra. This algorithm is strikingly simple to implement and proves to provide practical accuracy at a higher speed than generalized previous methods.
SIFT-Realistic Rendering

3D localization approaches establish correspondences between points in a query image and a 3D point cloud reconstruction of the environment. Traditionally, the database models are created from photographs using Structure-from-Motion (SfM) techniques, which requires large collections of densely sampled images. In this paper, we address the question how point cloud data from terrestrial laser scanners can be used instead to significantly reduce the data collection effort and enable more scalable localization.
The key change here is that, in contrast to SfM points, laser-scanned 3D points are not automatically associated with local image features that could be matched to query image features. In order to make this data usable for image-based localization, we explore how point cloud rendering techniques can be leveraged to create virtual views from which database features can be extracted that match real image-based features as closely as possible. We propose different rendering techniques for this task, experimentally quantify how they affect feature repeatability, and demonstrate their benefit for image-based localization.
Fast and stable cloth simulation based on multi-resolution shape matching

We present an efficient and unconditionally stable method which allows the deformation of very complex stiff cloth models in real-time. This method is based on a shape matching approach which uses edges and triangles as 1D and 2D regions to simulate stretching and shearing resistance. Previous shape matching approaches require large overlapping regions to simulate stiff materials. This unfortunately also affects the bending behavior of the model. Instead of using large regions, we introduce a novel multi-resolution shape matching approach to increase only the stretching and shearing stiffness. Shape matching is performed for each level of the multi-resolution model and the results are propagated from one level to the next one. To preserve the fine wrinkles of the cloth on coarse levels of the hierarchy we present a modified version of the original shape matching method. The introduced method for cloth simulation can perform simulations in linear time and has no numerical damping. Furthermore, we show that multi-resolution shape matching can be performed efficiently on the GPU.
@ARTICLE{Bender2013_2,
author = {Jan Bender and Daniel Weber and Raphael Diziol},
title = {Fast and stable cloth simulation based on multi-resolution shape matching},
journal = {Computers \& Graphics },
year = {2013},
volume = {37},
pages = {945 - 954},
number = {8},
doi = {http://dx.doi.org/10.1016/j.cag.2013.08.003},
issn = {0097-8493},
url = {http://www.sciencedirect.com/science/article/pii/S0097849313001283}
}
Adaptive cloth simulation using corotational finite elements

In this article we introduce an efficient adaptive cloth simulation method which is based on a reversible $\sqrt{3}$-refinement of corotational finite elements. Our novel approach can handle arbitrary triangle meshes and is not restricted to regular grid meshes which are required by other adaptive methods. Most previous works in the area of adaptive cloth simulation use discrete cloth models like mass-spring systems in combination with a specific subdivision scheme. However, if discrete models are used, the simulation does not converge to the correct solution as the mesh is refined. Therefore, we introduce a cloth model which is based on continuum mechanics since continuous models do not have this problem. We use a linear elasticity model in combination with a corotational formulation to achieve a high performance. Furthermore, we present an efficient method to update the sparse matrix structure after a refinement or coarsening step. The advantage of the $\sqrt{3}$-subdivision scheme is that it generates high quality meshes while the number of triangles increases only by a factor of 3 in each refinement step. However, the original scheme was not intended for the use in an interactive simulation and only defines a mesh refinement. In this article we introduce a combination of the original refinement scheme with a novel coarsening method to realize an adaptive cloth simulation with high quality meshes. The proposed approach allows an efficient mesh adaption and therefore does not cause much overhead. We demonstrate the significant performance gain which can be achieved with our adaptive simulation method in several experiments including a complex garment simulation.
@ARTICLE{Bender2013,
author = {Jan Bender and Crispin Deul},
title = {Adaptive cloth simulation using corotational finite elements },
journal = {Computers \& Graphics },
year = {2013},
volume = {37},
pages = {820 - 829},
number = {7},
doi = {http://dx.doi.org/10.1016/j.cag.2013.04.008},
url = {http://www.sciencedirect.com/science/article/pii/S0097849313000605},
issn = {0097-8493}
}
Failure Mode and Effects Analysis in Designing a Virtual Reality-Based Training Simulator for Bilateral Sagittal Split Osteotomy

Virtual reality-based simulators offer a cost-effective and efficient alternative to traditional medical training and planning. Developing a simulator that enables the training of medical skills and also supports recognition of errors made by the trainee is a challenge. The first step in developing such a system consists of error identification in the real procedure, in order to ensure that the training environment covers the most significant errors that can occur. This paper focuses on identifying the main system requirements for an interactive simulator for training bilateral sagittal split osteotomy (BSSO). An approach is proposed based on failure mode and effects analysis (FMEA), a risk analysis method that is well structured and already an approved technique in other domains. Based on the FMEA results, a BSSO training simulator is currently being developed, which centers upon the main critical steps of the procedure (sawing and splitting) and their main errors. FMEA seems to be a suitable tool in the design phase of developing medical simulators. Herein, it serves as a communication medium for knowledge transfer between the medical experts and the system developers. The method encourages a reflective process and allows identification of the most important elements and scenarios that need to be trained.
VisNEST – Interactive Analysis of Neural Activity Data
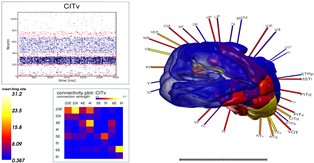
The aim of computational neuroscience is to gain insight into the dynamics and functionality of the nervous system by means of modeling and simulation. Current research leverages the power of High Performance Computing facilities to enable multi-scale simulations capturing both low-level neural activity and large-scale interactions between brain regions. In this paper, we describe an interactive analysis tool that enables neuroscientists to explore data from such simulations. One of the driving challenges behind this work is the integration of macroscopic data at the level of brain regions with microscopic simulation results, such as the activity of individual neurons. While researchers validate their findings mainly by visualizing these data in a non-interactive fashion, state-of-the-art visualizations, tailored to the scientific question yet sufficiently general to accommodate different types of models, enable such analyses to be performed more efficiently. This work describes several visualization designs, conceived in close collaboration with domain experts, for the analysis of network models. We primarily focus on the exploration of neural activity data, inspecting connectivity of brain regions and populations, and visualizing activity flux across regions. We demonstrate the effectiveness of our approach in a case study conducted with domain experts.
Distributed Parallel Particle Advection using Work Requesting
Particle advection is an important vector field visualization technique that is difficult to apply to very large data sets in a distributed setting due to scalability limitations in existing algorithms. In this paper, we report on several experiments using work requesting dynamic scheduling which achieves balanced work distribution on arbitrary problems with minimal communication overhead. We present a corresponding prototype implementation, provide and analyze benchmark results, and compare our results to an existing algorithm.
An Evaluation of Two Simple Methods for Representing Heaviness in Immersive Virtual Environments
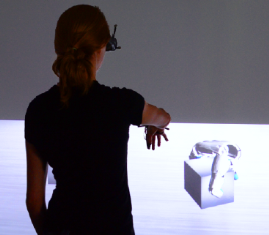
Weight perception in virtual environments generally can be achieved with haptic devices. However, most of these are hard to integrate in an immersive virtual environment (IVE) due to their technical complexity and the restriction of a user's movement within the IVE. We describe two simple methods using only a wireless light-weight finger-tracking device in combination with a physics simulated hand model to create a feeling of heaviness of virtual objects when interacting with them in an IVE. The first method maps the varying distance between tracked fingers and the thumb to the grasping force required for lifting a virtual object with a given weight. The second method maps the detected intensity of finger pinch during grasping gestures to the lifting force. In an experiment described in this paper we investigated the potential of the proposed methods for the discrimination of heaviness of virtual objects by finding the just noticeable difference (JND) to calculate the Weber fraction. Furthermore, the workload that users experienced using these methods was measured to gain more insight into their usefulness as interaction technique. At a hit ratio of 0.75, the determined Weber fraction using the finger distance based method was 16.25% and using the pinch based method was 15.48%, which corresponds to values found in related work. There was no significant effect of method on the difference threshold measured and the workload experienced, however the user preference was higher for the pinch based method. The results demonstrate the capability of the proposed methods for the perception of heaviness in IVEs and therefore represent a simple alternative to haptics based methods.
Research Challenges for Visualization Software
Over the last twenty-five years, visualization software has evolved into robust frameworks that can be used for research projects, rapid prototype development, or as the basis of richly featured, end-user tools. In this article, new take stock of current capabilities and describe upcoming challenges facing visualization software in six categories: massive parallelization, emerging processor architectures, application architecture and data management,data models, rendering, and interaction. Further, for each of these categories, we describe evolutionary advances sufficient to meet the visualization software challenge, and posit areas in which revolutionary advances are required
Virtual Air Traffic System Simulation - Aiding the Communication of Air Traffic Effects
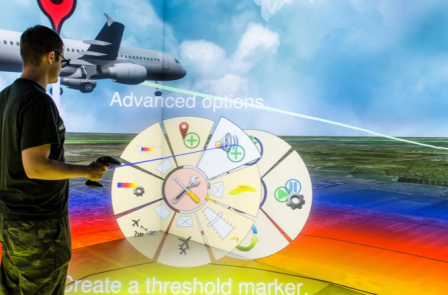
A key aspect of air traffic infrastructure projects is the communication between stakeholders during the approval process regarding their environmental impact. Yet, established means of communication have been found to be rather incomprehensible. In this paper we present an application that addresses these communication issues by enabling the exploration of airplane noise emissions in the vicinity of airports in a virtual environment (VE). The VE is composed of a model of the airport area and flight movement data. We combine a real-time 3D auralization approach with visualization techniques to allow for an intuitive access to noise emissions. Specifically designed interaction techniques help users to easily explore and compare air traffic scenarios.
Extended Pie Menus for Immersive Virtual Environments
Pie menus are a well-known technique for interacting with 2D environments and so far a large body of research documents their usage and optimizations. Yet, comparatively little research has been done on the usability of pie menus in immersive virtual environments (IVEs). In this paper we reduce this gap by presenting an implementation and evaluation of an extended hierarchical pie menu system for IVEs that can be operated with a six-degrees-of-freedom input device. Following an iterative development process, we first developed and evaluated a basic hierarchical pie menu system. To better understand how pie menus should be operated in IVEs, we tested this system in a pilot user study with 24 participants and focus on item selection. Regarding the results of the study, the system was tweaked and elements like check boxes, sliders, and color map editors were added to provide extended functionality. An expert review with five experts was performed with the extended pie menus being integrated into an existing VR application to identify potential design issues. Overall results indicated high performance and efficient design.
A Scalable Collaborative Online System for City Reconstruction

Recent advances in Structure-from-Motion and Bundle Adjustment allow us to efficiently reconstruct large 3D scenes from millions of images. However, acquiring the imagery necessary to reconstruct a whole city and not only its landmark buildings still poses a tremendous problem. In this paper, we therefore present an online system for collaborative city reconstruction that is based on crowdsourcing the image acquisition. Employing publicly available building footprints to reconstruct individual blocks rather than the whole city at once enables our system to easily scale to large urban environments. In order to map all partial reconstructions into a single coordinate frame, we develop a robust alignment scheme that registers the individual point clouds to their corresponding footprints based on GPS coordinates. Our approach can handle noise and outliers in the GPS positions and allows us to detect wrong alignments caused by the typical issues in the context of crowdsourcing applications such as malicious or improper image uploads. Furthermore, we present an efficient rendering method to obtain dense and textured views of the resulting point clouds without requiring costly multi-view stereo methods
@inproceedings{untzelmann2013iccv,
author = "Untzelmann, Ole and Sattler, Torsten and Middelberg, Sven and Kobbelt, Leif",
title = "{A Scalable Collaborative Online System for City Reconstruction}",
booktitle = "{The IEEE International Conference on Computer Vision (ICCV) Workshops}",
year = {2013}
}
Evaluation of a Mobile Projector based Indoor Navigation Interface
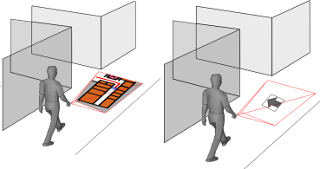
In recent years, the interest and potential applications of pedestrian indoor navigation solutions have significantly increased. Whereas the majority of mobile indoor navigation aid solutions visualize navigational information on mobile screens, the present study investigates the effectiveness of a mobile projector as navigation aid which directly projects navigational information into the environment. A benchmark evaluation of the mobile projector-based indoor navigation interface was carried out investigating a combination of different navigation devices (mobile projector vs. mobile screen) and navigation information (map vs. arrow) as well as the impact of users' spatial abilities. Results showed a superiority of the mobile screen as navigation aid and the map as navigation information type. Especially users with low spatial abilities benefited from this combination in their navigation performance and acceptance. Potential application scenarios and design implications for novel indoor navigation interfaces are derived from our findings.
Advanced Automatic Hexahedral Mesh Generation from Surface Quad Meshes
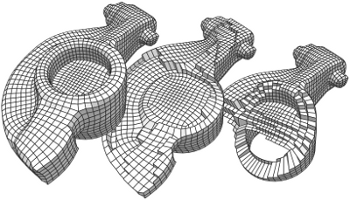
A purely topological approach for the generation of hexahedral meshes from quadrilateral surface meshes of genus zero has been proposed by M. Müller-Hannemann: in a first stage, the input surface mesh is reduced to a single hexahedron by successively eliminating loops from the dual graph of the quad mesh; in the second stage, the hexahedral mesh is constructed by extruding a layer of hexahedra for each dual loop from the first stage in reverse elimination order. In this paper, we introduce several techniques to extend the scope of target shapes of the approach and significantly improve the quality of the generated hexahedral meshes. While the original method can only handle "almost convex" objects and requires mesh surgery and remeshing in case of concave geometry, we propose a method to overcome this issue by introducing the notion of concave dual loops. Furthermore, we analyze and improve the heuristic to determine the elimination order for the dual loops such that the inordinate introduction of interior singular edges, i.e. edges of degree other than four in the hexahedral mesh, can be avoided in many cases.
Geometry Seam Carving
We present a novel approach to feature-aware mesh deformation. Previous mesh editing methods are based on an elastic deformation model and thus tend to uniformly distribute the distortion in a least squares sense over the entire deformation region. Recent results from image resizing, however, show that discrete local modifications like deleting or adding connected seams of image pixels in regions with low saliency lead to far superior preservation of local features compared to uniform scaling -- the image retargeting analogon to least squares mesh deformation. Hence, we propose a discrete mesh editing scheme that combines elastic as well as plastic deformation (in regions with little geometric detail) by transferring the concept of seam carving from image retargeting to the mesh deformation scenario. A geometry seam consists of a connected strip of triangles within the mesh's deformation region. By collapsing or splitting the interior edges of this strip we perform a deletion or insertion operation that is equivalent to image seam carving and can be interpreted as a local plastic deformation. We use a feature measure to rate the geometric saliency of each triangle in the mesh and a well-adjusted distortion measure to determine where the current mesh distortion asks for plastic deformations, i.e., for deletion or insertion of geometry seams. Precomputing a fixed set of low-saliency seams in the deformation region allows us to perform fast seam deletion and insertion operations in a predetermined order such that the local mesh modifications are properly restored when a mesh editing operation is (partially) undone. Geometry seam carving hence enables the deformation of a given mesh in a way that causes stronger distortion in homogeneous mesh regions while salient features are preserved much better.
Physically-Based Character Skinning

In this paper we present a novel multi-layer model for physically-based character skinning. In contrast to geometric approaches which are commonly used in the field of character skinning, physically-based methods can simulate secondary motion effects. Furthermore, these methods can handle collisions and preserve the volume of the model without the need of an additional post-process. Physically-based approaches are computationally more expensive than geometric methods but they provide more realistic results. Recent works in this area use finite element simulations to model the elastic behavior of skin. These methods require the generation of a volumetric mesh for the skin shape in a pre-processing step. It is not easy for an artist to model the different elastic behaviors of muscles, fat and skin using a volumetric mesh since there is no clear assignment between volume elements and tissue types. For our novel multi-layer model the mesh generation is very simple and can be performed automatically. Furthermore, the model contains a layer for each kind of tissue. Therefore, the artist can easily control the elastic behavior by adjusting the stiffness parameters for muscles, fat and skin. We use shape matching with oriented particles and a fast summation technique to simulate the elastic behavior of our skin model and a position-based constraint enforcement to handle collisions, volume conservation and the coupling of the skeleton with the deformable model. Position-based methods have the advantage that they are fast, unconditionally stable, controllable and provide visually plausible results.
@inproceedings{Deul2013,
author = {Crispin Deul and Jan Bender},
title = {Physically-Based Character Skinning},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2013},
month = nov,
address = {Lille, France},
publisher = {Eurographics Association}
}
Multilevel Cloth Simulation using GPU Surface Sampling

Today most cloth simulation systems use triangular mesh models. However, regular grids allow many optimizations as connectivity is implicit, warp and weft directions of the cloth are aligned to grid edges and distances between particles are equal. In this paper we introduce a cloth simulation that combines both model types. All operations that are performed on the CPU use a low-resolution triangle mesh while GPU-based methods are performed efficiently on a high-resolution grid representation. Both models are coupled by a sampling operation which renders triangle vertex data into a texture and by a corresponding projection of texel data onto a mesh. The presented scheme is very flexible and allows individual components to be performed on different architectures, data representations and detail levels. The results are combined using shader programs which causes a negligible overhead. We have implemented CPU-based collision handling and a GPU-based hierarchical constraint solver to simulate systems with more than 230k particles in real-time.
@inproceedings{Schmitt2013,
author = {Nikolas Schmitt and Martin Knuth and Jan Bender and Arjan Kuijper},
title = {Multilevel Cloth Simulation using GPU Surface Sampling},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2013},
month = nov,
address = {Lille, France},
publisher = {Eurographics Association}
}
Level of Detail for Real-Time Volumetric Terrain Rendering
Terrain rendering is an important component of many GIS applications and simulators. Most methods rely on heightmap-based terrain which is simple to acquire and handle, but has limited capabilities for modeling features like caves, steep cliffs, or overhangs. In contrast, volumetric terrain models, e.g. based on isosurfaces can represent arbitrary topology. In this paper, we present a fast, practical and GPU-friendly level of detail algorithm for large scale volumetric terrain that is specifically designed for real-time rendering applications. Our algorithm is based on a longest edge bisection (LEB) scheme. The resulting tetrahedral cells are subdivided into four hexahedra, which form the domain for a subsequent isosurface extraction step. The algorithm can be used with arbitrary volumetric models such as signed distance fields, which can be generated from triangle meshes or discrete volume data sets. In contrast to previous methods our algorithm does not require any stitching between detail levels. It generates crack free surfaces with a good triangle quality. Furthermore, we efficiently extract the geometry at runtime and require no preprocessing, which allows us to render infinite procedural content with low memory consumption.
@inproceedings{Scholz2013,
author = {Manuel Scholz and Jan Bender and Carsten Dachsbacher },
title = {{Level of Detail for Real-Time Volumetric Terrain Rendering}},
pages = {211-218},
URL = {http://diglib.eg.org/EG/DL/PE/VMV/VMV13/211-218.pdf},
DOI = {10.2312/PE.VMV.VMV13.211-218},
editor = {Michael Bronstein and Jean Favre and Kai Hormann},
booktitle = {VMV 2013: Vision, Modeling & Visualization},
year = {2013},
address = {Lugano, Switzerland},
publisher = {Eurographics Association}
}
Screen-Space Ambient Occlusion Using A-buffer Techniques
Computing ambient occlusion in screen-space (SSAO) is a common technique in real-time rendering applications which use rasterization to process 3D triangle data. However, one of the most critical problems emerging in screen-space is the lack of information regarding occluded geometry which does not pass the depth test and is therefore not resident in the G-buffer. These occluded fragments may have an impact on the proximity-based shadowing outcome of the ambient occlusion pass. This not only decreases image quality but also prevents the application of SSAO on multiple layers of transparent surfaces where the shadow contribution depends on opacity. We propose a novel approach to the SSAO concept by taking advantage of per-pixel fragment lists to store multiple geometric layers of the scene in the G-buffer, thus allowing order independent transparency (OIT) in combination with high quality, opacity-based ambient occlusion (OITAO). This A-buffer concept is also used to enhance overall ambient occlusion quality by providing stable results for low-frequency details in dynamic scenes. Furthermore, a flexible compression-based optimization strategy is introduced to improve performance while maintaining high quality results.
@inproceedings{Bauer2013,
author = {Fabian Bauer and Martin Knuth and Jan Bender},
title = {Screen-Space Ambient Occlusion Using A-buffer Techniques},
booktitle = {International Conference on Computer-Aided Design and Computer Graphics},
year = {2013},
month = nov,
address = {Hong Kong, China},
publisher = {IEEE}
}
Streaming Data from HDD to GPUs for Sustained Peak Performance
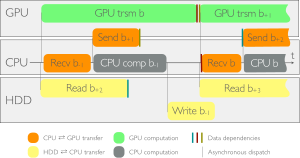
In the context of the genome-wide association studies (GWAS), one has to solve long sequences of generalized least-squares problems; such a task has two limiting factors: execution time --often in the range of days or weeks-- and data management --data sets in the order of Terabytes. We present an algorithm that obviates both issues. By pipelining the computation, and thanks to a sophisticated transfer strategy, we stream data from hard disk to main memory to GPUs and achieve sustained peak performance; with respect to a highly-optimized CPU implementation, our algorithm shows a speedup of 2.6x. Moreover, the approach lends itself to multiple GPUs and attains almost perfect scalability. When using 4 GPUs, we observe speedups of 9x over the aforementioned implementation, and 488x over a widespread biology library.
@inproceedings{Beyer2013GWAS,
author = {Lucas Beyer and Paolo Bientinesi},
title = {Streaming Data from HDD to GPUs for Sustained Peak Performance},
booktitle = {Euro-Par},
publisher = {Springer},
series = {Lecture Notes in Computer Science},
volume = {8097},
pages = {788-799},
year = {2013},
isbn = {3642400477},
ee = {http://arxiv.org/abs/1302.4332},
}
ProFi: Design and Evaluation of a Product Finder in a Supermarket Scenario

This paper presents the design and evaluation of ProFi, a PROduct FInding assistant in a supermarket scenario. We explore the idea of micro-navigation in supermarkets and aim at enhancing visual search processes in front of a shelf. In order to assess the concept, a prototype is built combining visual recognition techniques with an Augmented Reality interface. Two AR patterns (circle and spotlight) are designed to highlight target products. The prototype is formally evaluated in a controlled environment. Quantitative and qualitative data is collected to evaluate the usability and user preference. The results show that ProFi significantly improves the users’ product finding performance, especially when using the circle, and that ProFi is well accepted by users.
Poster: Interactive Visualization of Brain-Scale Spiking Activity
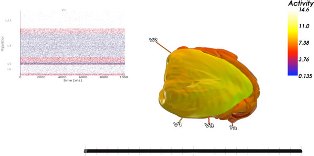
In recent years, the simulation of spiking neural networks has advanced in terms of both simulation technology and knowledge about neuroanatomy. Due to these advances, it is now possible to run simulations at the brain scale, which produce an unprecedented amount of data to be analyzed and understood by researchers. As aid, VisNEST, a tool for the combined visualization of simulated spike data and anatomy was developed.
Adaptive Human Motion Prediction using Multiple Model Approaches
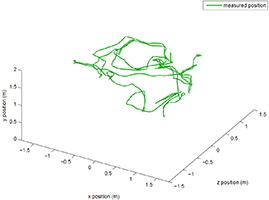
A common problem in Virtual Reality is latency. Especially for head tracking, latency can lead to a lower immersion. Prediction can be used to reduce the effect of latency. However, for good results the prediction process has to be reliably fast and accurate. Human motion is not homogeneous and humans often tend to change the way they move. Prediction models can be designed for these special motion types. To combine the special models, a multiple model approach is presented. It constantly evaluates the quality of the different specialized motion prediction and adjusts the set of motion models. We propose two variants, and compare them to a reference prediction algorithm.
Poster Interactive Visualization of Brain Volume Changes
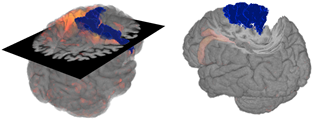
The visual analysis of brain volume data by neuroscientists is commonly done in 2D coronal, sagittal and transversal views, limiting the visualization domain from potentially three to two dimensions. This is done to avoid occlusion and thus gain necessary context information. In contrast, this work intends to benefit from all spatial information that can help to understand the original data. Example data of a patient with brain degeneration are used to demonstrate how to enrich 2D with 3D data. To this end, two approaches are presented. First, a conventional 2D section in combination with transparent brain anatomy is used. Second, the principle of importance-driven volume rendering is adapted to allow a direct line-of-sight to relevant structures by means of a frustum-like cutout.
Poster: Hyperslice Visualization of Metamodels for Manufacturing Processes
In modeling and simulation of manufacturing processes, complex models are used to examine and understand the behavior and properties of the product or process. To save computation time, global approximation models, often referred to as metamodels, serve as surrogates for the original complex models. Such metamodels are difficult to interpret, because they usually have multi-dimensional input and output domains. We propose a hyperslice-based visualization approach, that uses hyperslices in combination with direct volume rendering, training point visualization, and gradient trajectory navigation, that helps in understanding such metamodels. Great care was taken to provide a high level of interactivity for the exploration of the data space.
Physically Based Rendering of the Martian Atmosphere
With the introduction of complex precomputed scattering tables by Bruneton in 2008, the quality of visualizing atmospheric scattering vastly improved. The presented algorithms allowed for the rendering of complex atmospheric features such as multiple-scattering or light shafts in real-time and at interactive framerates. While their published implementation corresponding to the publication was merely a proof of concept, we present a more practical approach by applying their scattering theory to an already existing planetary rendering engine. Because the commonly used set of parameters only describes the atmosphere of the Earth, we further extend the scattering formulation to visualize the atmosphere of the planet Mars. Validating the modified scattering and resulting parameters is then done by comparison with available imagery from the Martian atmosphere
Multi-View 3D Reconstruction of Highly-Specular Objects

In this thesis, we address the problem of image-based 3D reconstruction of objects exhibiting complex reflectance behaviour using surface gradient information techniques. In this context, we are addressing two open questions. The first one focuses on the aspect, if it is possible to design a robust multi-view normal field integration algorithm, which can integrate noisy, imprecise and only partially captured real-world data. Secondly, the question is if it is possible to recover a precise geometry of the challenging highly-specular objects by multi-view normal estima- tion and integration using such an algorithm.
The main result of this work is the first multi-view normal field integration algorithm that reliably reconstructs a surface of object from normal fields captured in the real-world setup. The surface of the unknown object is reconstructed by fitting a surface to the vector field reconstructed from observed normal samples. The vector field and the surface consistency information are computed based on a feature space analysis of back-projections of the normals using robust, nonparametric probability density estimation methods. This normal field integration technique is not only suitable for reconstructing lambertian objects, but, in the scope of this work, it is also used for the reconstruction of highly-specular objects via multi-view shape-from-specularity techniques.
We performed an evaluation on synthetic normal fields, photometric stereo based normal estimates of a real lambertian object and, most importantly, demon- strated state-of-the art results in the domain of 3D reconstruction of highly-specular objects based on the measured data and integrated by the proposed algorithm. Our method presents a significant advancement in the area of gradient information based 3D reconstruction techniques with a potential to address 3D reconstruction of a large class of objects exhibiting complex reflectance behaviour. Furthermore, using this method, a wide range of proposed normal estimation techniques can now be used for the recovery of full 3D shapes.
Computer Vision Systems

This book constitutes the refereed proceedings of the 9th International Conference on Computer Vision Systems, ICVS 2013, held in St. Petersburg, Russia, July 16-18, 2013. Proceedings. The 16 revised papers presented with 20 poster papers were carefully reviewed and selected from 94 submissions. The papers are organized in topical sections on image and video capture; visual attention and object detection; self-localization and pose estimation; motion and tracking; 3D reconstruction; features, learning and validation.
Multi-Scale, Categorical Object Detection and Pose Estimation using Hough Forest in RGB-D Images

Classification and localization of objects enables a robot to plan and execute tasks in unstructured environments. Much work on the detection and pose estimation of objects in the robotics context focused on object instances. We propose here a novel approach that detects object classes and finds the canonical pose of the detected objects in RGB-D images using Hough forests. In Hough forests each random decision tree maps local image patch to one of its leaves through a cascade of binary decisions over a patch appearance, where each leaf casts probabilistic Hough vote in Hough space encoded in object location, scale and orientation. We propose depth and surfel pair-feature as an additional appearance channels to introduce scale, shape and geometric information about the object. Moreover, we exploit depth at various stages of the processing pipeline to handle variable scale efficiently. Since obtaining large amounts of annotated training data is a cumbersome process, we use training data captured on a turn-table setup. Although the training examples from this domain do not include clutter, occlusions or varying background situations. Hence, we propose a simple but effective approach to render training images from turn-table dataset which shows the same statistical distribution in image properties as natural scenes. We evaluate our approach on publicly available RGB-D object recognition benchmark datasets and demonstrate good performance in varying background and view poses, clutter, and occlusions.
Depth-Enhanced Hough Forests for Object-Class Detection and Continuous Pose Estimation
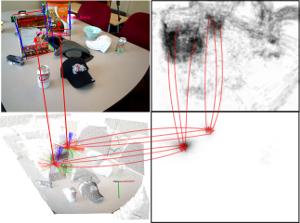
Much work on the detection and pose estimation of objects in the robotics context focused on object instances. We propose a novel approach that detects object classes and finds the pose of the detected objects in RGB-D images. Our method is based on Hough forests, a variant of random decision and regression trees that categorize pixels and vote for 3D object position and orientation. It makes efficient use of dense depth for scale-invariant detection and pose estimation. We propose an effective way to train our method for arbitrary scenes that are rendered from training data in a turn-table setup. We evaluate our approach on publicly available RGB-D object recognition benchmark datasets and demonstrate stateof-the-art performance in varying background and view poses, clutter, and occlusions.
OpenFlipper - A Highly Modular Framework for Processing and Visualization of Complex Geometric Models

OpenFlipper is an open-source framework for processing and visualization of complex geometric models suitable for software development in both research and commercial applications. In this paper we describe in detail the software architecture which is designed in order to provide a high degree of modularity and adaptability for various purposes. Although OpenFlipper originates in the field of geometry processing, many emerging applications in this domain increasingly rely on immersion technologies. Consequently, the presented software is, unlike most existing VR software frameworks, mainly intended to be used for the content creation and processing of virtual environments while directly providing a variety of immersion techniques. By keeping OpenFlipper’s core as simple as possible and implementing functional components as plugins, the framework’s structure allows for easy extensions, replacements, and bundling. We particularly focus on the description of the integrated rendering pipeline that addresses the requirements of flexible, modern high-end graphics applications. Furthermore we describe how cross-platform unit and smoke testing as well as continuous integration is implemented in order to guarantee that new code revisions remain portable and regression is minimized. OpenFlipper is licensed under the Lesser GNU Public License and available, up to this state, for Linux, Windows, and Mac OSX.
Taking Mobile Multi-Object Tracking to the Next Level: People, Unknown Objects, and Carried Items
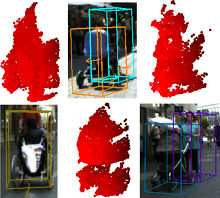
In this paper, we aim to take mobile multi-object tracking to the next level. Current approaches work in a tracking-by-detection framework, which limits them to object categories for which pre-trained detector models are available. In contrast, we propose a novel tracking-before-detection approach that can track both known and unknown object categories in very challenging street scenes. Our approach relies on noisy stereo depth data in order to segment and track objects in 3D. At its core is a novel, compact 3D representation that allows us to robustly track a large variety of objects, while building up models of their 3D shape online. In addition to improving tracking performance, this represensation allows us to detect anomalous shapes, such as carried items on a person’s body. We evaluate our approach on several challenging video sequences of busy pedestrian zones and show that it outperforms state-of-the-art approaches.
Joint 2D-3D Temporally Consistent Semantic Segmentation of Street Scenes
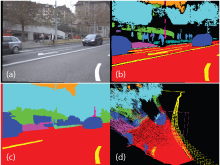
In this paper we propose a novel Conditional Random Field (CRF) formulation for the semantic scene labeling problem which is able to enforce temporal consistency between consecutive video frames and take advantage of the 3D scene geometry to improve segmentation quality. The main contribution of this work lies in the novel use of a 3D scene reconstruction as a means to temporally couple the individual image segmentations, allowing information flow from 3D geometry to the 2D image space. As our results show, the proposed framework outperforms state-of-the-art methods and opens a new perspective towards a tighter interplay of 2D and 3D information in the scene understanding problem.
Dual Loops Meshing: Quality Quad Layouts on Manifolds
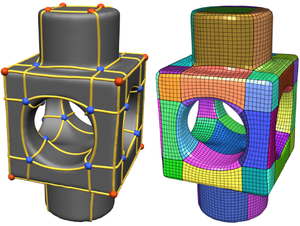
We present a theoretical framework and practical method for the automatic construction of simple, all-quadrilateral patch layouts on manifold surfaces. The resulting layouts are coarse, surface-embedded cell complexes well adapted to the geometric structure, hence they are ideally suited as domains and base complexes for surface parameterization, spline fitting, or subdivision surfaces and can be used to generate quad meshes with a high-level patch structure that are advantageous in many application scenarios. Our approach is based on the careful construction of the layout graph's combinatorial dual. In contrast to the primal this dual perspective provides direct control over the globally interdependent structural constraints inherent to quad layouts. The dual layout is built from curvature-guided, crossing loops on the surface. A novel method to construct these efficiently in a geometry- and structure-aware manner constitutes the core of our approach.
Interactive Simulation of Rigid Body Dynamics in Computer Graphics

Interactive rigid body simulation is an important part of many modern computer tools. No authoring tool nor a game engine can do without. The high performance computer tools open up new possibilities for changing how designers, engineers, modelers and animators work with their design problems.
This paper is a self contained state-of-the-art report on the physics, the models, the numerical methods and the algorithms used in interactive rigid body simulation all of which has evolved and matured over the past 20 years. The paper covers applications and the usage of interactive rigid body simulation.
Besides the mathematical and theoretical details that this paper communicates in a pedagogical manner the paper surveys common practice and reflects on applications of interactive rigid body simulation. The grand merger of interactive and off-line simulation methods is imminent, multi-core is everyman's property. These observations pose future challenges for research which we reflect on. In perspective several avenues for possible future work is touched upon such as more descriptive models and contact point generation problems. This paper is not only a stake in the sand on what has been done, it also seeks to give newcomers practical hands on advices and reflections that can give experienced researchers afterthought for the future. CrashTest
@inproceedings{BETC2012,
title = "Interactive Simulation of Rigid Body Dynamics in Computer Graphics",
author = "Jan Bender and Kenny Erleben and Jeff Trinkle and Erwin Coumans",
year = "2012",
booktitle = "EUROGRAPHICS 2012 State of the Art Reports",
publisher = "Eurographics Association",
location = "Cagliari, Sardinia, Italy"
}
Close-Range Human Detection for Head-Mounted Cameras
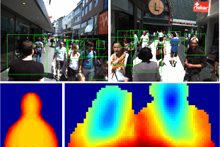
In this paper we consider the problem of multi-person detection from the perspective of a head mounted stereo camera. As pedestrians close to the camera cannot be detected by classical full-body detectors due to strong occlusion, we propose a stereo depth-template based detection approach for close-range pedestrians. We perform a sliding window procedure, where we measure the similarity between a learned depth template and the depth image. To reduce the search space of the detector we slide the detector only over few selected regions of interest that are generated based on depth information. The region-of-interest selection allows us to further constrain the number of scales to be evaluated, significantly reducing the computational cost. We present experiments on stereo sequences recorded from a head-mounted camera setup in crowded shopping street scenarios and show that our proposed approach achieves superior performance on this very challenging data.
Improving Image-Based Localization by Active Correspondence Search
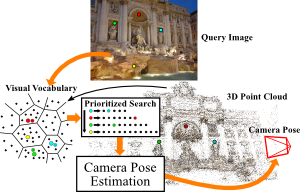
We propose a powerful pipeline for determining the pose of a query image relative to a point cloud reconstruction of a large scene consisting of more than one million 3D points. The key component of our approach is an efficient and effective search method to establish matches between image features and scene points needed for pose estimation. Our main contribution is a framework for actively searching for additional matches, based on both 2D-to-3D and 3D-to-2D search. A unified formulation of search in both directions allows us to exploit the distinct advantages of both strategies, while avoiding their weaknesses. Due to active search, the resulting pipeline is able to close the gap in registration performance observed between efficient search methods and approaches that are allowed to run for multiple seconds, without sacrificing run-time efficiency. Our method achieves the best registration performance published so far on three standard benchmark datasets, with run-times comparable or superior to the fastest state-of-the-art methods.
The original publication will be available at www.springerlink.com upon publication.
Procedural Interpolation of Historical City Maps
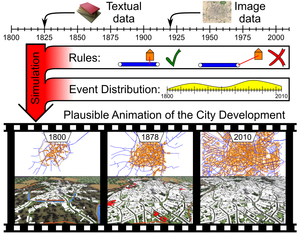
We propose a novel approach for the temporal interpolation of city maps. The input to our algorithm is a sparse set of historical city maps plus optional additional knowledge about construction or destruction events. The output is a fast forward animation of the city map development where roads and buildings are constructed and destroyed over time in order to match the sparse historical facts and to look plausible where no precise facts are available. A smooth transition between any real-world data could be interesting for educational purposes, because our system conveys an intuition of the city development. The insertion of data, like when and where a certain building or road existed, is efficiently performed by an intuitive graphical user interface. Our system collects all this information into a global dependency graph of events. By propagating time intervals through the dependency graph we can automatically derive the earliest and latest possible date for each event which are guaranteeing temporal as well as geographical consistency (e.g. buildings can only appear along roads that have been constructed before). During the simulation of the city development, events are scheduled according to a score function that rates the plausibility of the development (e.g. cities grow along major roads). Finally, the events are properly distributed over time to control the dynamics of the city development. Based on the city map animation we create a procedural city model in order to render a 3D animation of the city development over decades.
Rationalization of Triangle-Based Point-Folding Structures
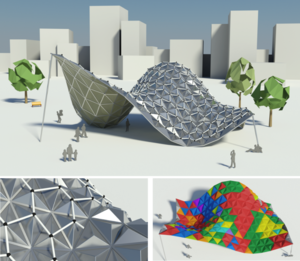
In mechanical engineering and architecture, structural elements with low material consumption and high load-bearing capabilities are essential for light-weight and even self-supporting constructions. This paper deals with so called point-folding elements - non-planar, pyramidal panels, usually formed from thin metal sheets, which exploit the increased structural capabilities emerging from folds or creases. Given a triangulated free-form surface, a corresponding point-folding structure is a collection of pyramidal elements basing on the triangles. User-specified or material-induced geometric constraints often imply that each individual folding element has a different shape, leading to immense fabrication costs. We present a rationalization method for such structures which respects the prescribed aesthetic and production constraints and ?nds a minimal set of molds for the production process, leading to drastically reduced costs. For each base triangle we compute and parametrize the range of feasible folding elements that satisfy the given constraints within the allowed tolerances. Then we pose the rationalization task as a geometric intersection problem, which we solve so as to maximize the re-use of mold dies. Major challenges arise from the high precision requirements and the non-trivial parametrization of the search space. We evaluate our method on a number of practical examples where we achieve rationalization gains of more than 90%.
Linear Analysis of Nonlinear Constraints for Interactive Geometric Modeling
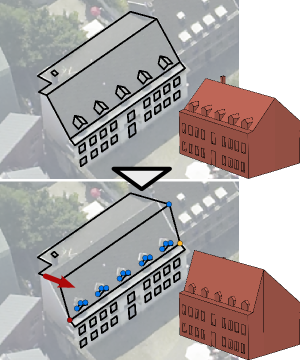
Thanks to its flexibility and power to handle even complex geometric relations, 3D geometric modeling with nonlinear constraints is an attractive extension of traditional shape editing approaches. However, existing approaches to analyze and solve constraint systems usually fail to meet the two main challenges of an interactive 3D modeling system: For each atomic editing operation, it is crucial to adjust as few auxiliary vertices as possible in order to not destroy the user's earlier editing effort. Furthermore, the whole constraint resolution pipeline is required to run in real-time to enable a fluent, interactive workflow. To address both issues, we propose a novel constraint analysis and solution scheme based on a key observation: While the computation of actual vertex positions requires nonlinear techniques, under few simplifying assumptions the determination of the minimal set of to-be-updated vertices can be performed on a linearization of the constraint functions. Posing the constraint analysis phase as the solution of an under-determined linear system with as few non-zero elements as possible enables us to exploit an efficient strategy for the Cardinality Minimization problem known from the field of Compressed Sensing, resulting in an algorithm capable of handling hundreds of vertices and constraints in real-time. We demonstrate at the example of an image-based modeling system for architectural models that this approach performs very well in practical applications.
Awards:
A Practical Guide to Polygon Mesh Repairing
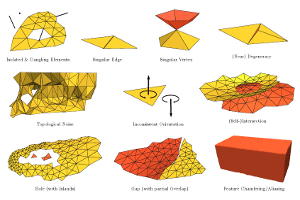
Digital 3D models are key components in many industrial and scientific sectors. In numerous domains polygon meshes have become a de facto standard for model representation. In practice meshes often have a number of defects and flaws that make them incompatible with quality requirements of specific applications. Hence, repairing such defects in order to achieve compatibility is a highly important task – in academic as well as industrial applications. In this tutorial we first systematically analyze typical application contexts together with their requirements and issues, as well as the various types of defects that typically play a role. Subsequently, we consider existing techniques to process, repair, and improve the structure, geometry, and topology of imperfect meshes, aiming at making them appropriate to case-by-case requirements. We present seminal works and key algorithms, discuss extensions and improvements, and analyze the respective advantages and disadvantages depending on the application context. Furthermore, we outline directions where further research is particularly important or promising.
Using Spherical Harmonics for Modeling Antenna Patterns
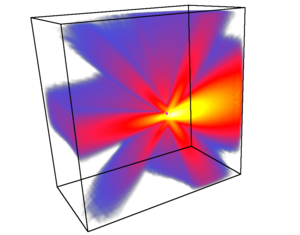
In radio wave propagation simulations there is a need for modeling antenna patterns. Both the transmitting and the receiving antenna influence the wireless link. We use spherical harmonics to compress the amount of measured data needed for complex antenna patterns. We present a method to efficiently incorporate these patterns into a ray tracing framework for radio wave propagation. We show how to efficiently generate rays according to the transmitting antenna pattern. The ray tracing simulation computes a compressed irradiance field for every point in the scene. The receiving antenna pattern can then be applied to this field for the final estimation of signal strength.
Comparing Auditory and Haptic Feedback for a Virtual Drilling Task

While visual feedback is dominant in Virtual Environments, the use of other modalities like haptics and acoustics can enhance believability, immersion, and interaction performance. Haptic feedback is especially helpful for many interaction tasks like working with medical or precision tools. However, unlike visual and auditory feedback, haptic reproduction is often difficult to achieve due to hardware limitations. This article describes a user study to examine how auditory feedback can be used to substitute haptic feedback when interacting with a vibrating tool. Participants remove some target material with a round-headed drill while avoiding damage to the underlying surface. In the experiment, varying combinations of surface force feedback, vibration feedback, and auditory feedback are used. We describe the design of the user study and present the results, which show that auditory feedback can compensate the lack of haptic feedback.
@inproceedings {EGVE:JVRC12:049-056,
booktitle = {Joint Virtual Reality Conference of ICAT - EGVE - EuroVR},
editor = {Ronan Boulic and Carolina Cruz-Neira and Kiyoshi Kiyokawa and David Roberts},
title = {{Comparing Auditory and Haptic Feedback for a Virtual Drilling Task}},
author = {Rausch, Dominik and Aspöck, Lukas and Knott, Thomas and Pelzer, Sönke and Vorländer, Michael and Kuhlen, Torsten},
year = {2012},
publisher = {The Eurographics Association},
ISSN = {1727-530X},
ISBN = {978-3-905674-40-8},
DOI = {10.2312/EGVE/JVRC12/049-056}
pages= { -- }
}
Topology aware Quad Dominant Meshing for Vascular Structures
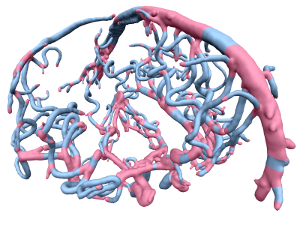
We present a pipeline to generate high quality quad dominant meshes for vascular structures from a given volumetric image. As common for medical image segmentation we use a Level Set approach to separate the region of interest from the background. However in contrast to the standard method we control the topology of the deformable object – defined by the Level Set function – which allows us to extract a proper skeleton which represents the global topological information of the vascular structure. Instead of solving a complex global optimization problem to compute a quad mesh, we divide the problem and partition the complex model into junction and tube elements, employing the skeleton of the vascular structure. After computing quad meshes for the junctions using the Mixed Integer Quadrangulation approach, we re-mesh the tubes using an algorithm inspired by the well known Bresenham Algorithm for drawing lines which distributes irregular elements equally over the entire tube element.
Interactive Modeling by Procedural High-Level Primitives
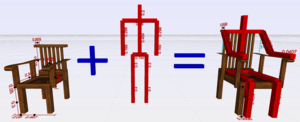
Procedural modeling is a promising approach to create complex and detailed 3D objects and scenes. Based on the concept of split grammars, e.g., construction rules can be defined textually in order to describe a hierarchical build-up of a scene. Unfortunately, creating or even just reading such grammars can become very challenging for non-programmers. Recent approaches have demonstrated ideas to interactively control basic split operations for boxes, however, designers need to have a deep understanding of how to express a certain object by just using box splitting. Moreover, the degrees of freedom of a certain model are typically very high and thus the adjustment of parameters remains more or less a trial-and-error process. In our paper, we therefore present novel concepts for the intuitive and interactive handling of complex procedural grammars allowing even amateurs and non-programmers to easily modify and combine existing procedural models that are not limited to the subdivision of boxes. In our grammar 3D manipulators can be defined in order to spawn a visual representation of adjustable parameters directly in model space to reveal the influence of a parameter. Additionally, modules of the procedural grammar can be associated with a set of camera views which draw the user's attention to a specific subset of relevant parameters and manipulators. All these concepts are encapsulated into procedural high-level primitives that effectively support the efficient creation of complex procedural 3D scenes. Since our target group are mainly users without any experience in 3D modeling, we prove the usability of our system by letting some untrained students perform a modeling task from scratch.
Efficient cloth simulation using an adaptive finite element method
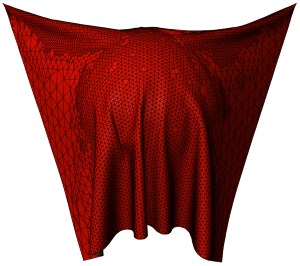
In this paper we present an efficient adaptive cloth simulation based on the sqrt(3)-refinement scheme. Our adaptive cloth model can handle arbitrary triangle meshes and is not restricted to regular grid meshes which are required by other methods. Previous works on adaptive cloth simulation often use discrete cloth models like mass-spring systems in combination with a specific subdivision scheme. The problem of such models is that the simulation does not converge to the correct solution as the mesh is refined. We propose to use a cloth model which is based on continuum mechanics since continuous models do not have this problem. In order to perform an efficient simulation we use a linear elasticity model in combination with a corotational formulation.
The sqrt(3)-subdivision scheme has the advantage that it generates high quality meshes while the number of triangles increases only by a factor of 3 in each refinement step. However, the original scheme only defines a mesh refinement. Therefore, we introduce an extension to support the coarsening of our simulation model as well. Our proposed mesh adaption can be performed efficiently and therefore does not cause much overhead. In this paper we will show that a significant performance gain can be achieved by our adaptive method.
@inproceedings{Bender12,
author = {Jan Bender and Crispin Deul},
title = {Efficient Cloth Simulation Using an Adaptive Finite Element Method},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
isbn = {978-3-905673-96-8},
year = {2012},
month = dec,
address = {Darmstadt, Germany},
publisher = {Eurographics Association},
DOI = {10.2312/PE/vriphys/vriphys12/021-030},
pages = {21-30}
}
Geometrical-Acoustics-based Ultrasound Image Simulation

Brightness modulation (B-Mode) ultrasound (US) images are used to visualize internal body structures during diagnostic and invasive procedures, such as needle insertion for Regional Anesthesia. Due to patient availability and health risks-during invasive procedures-training is often limited, thus, medical training simulators become a viable solution to the problem. Simulation of ultrasound images for medical training requires not only an acceptable level of realism but also interactive rendering times in order to be effective. To address these challenges, we present a generative method for simulating B-Mode ultrasound images using surface representations of the body structures and geometrical acoustics to model sound propagation and its interaction within soft tissue. Furthermore, physical models for backscattered, reflected and transmitted energies as well as for the beam profile are used in order to improve realism. Through the proposed methodology we are able to simulate, in real-time, plausible view- and depth-dependent visual artifacts that are characteristic in B-Mode US images, achieving both, realism and interactivity.
A Framework for Vision-based Mobile AR Applications

This paper analyzes the requirements for a general purpose mobile Augmented Reality framework that supports expert as well as non-expert authors to create customized mobile AR applications. A key component is the use of image based localization performed on a central server. It further describes an implementation of such a framework as well as an example application created in this framework to demonstrate the practicability of the described design.
Dynamic Tiling Display: Building an Interactive Display Surface using Multiple Mobile Devices
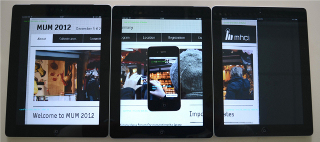
Table display surfaces, like Microsoft PixelSense, can display multimedia content to a group of users simultaneously, but it is expensive and lacks mobility. On the contrary, mobile devices are more easily available, but due to limited screen size and resolution, they are not suitable for sharing multimedia data interactively. In this paper we present a "Dynamic Tiling Display", an interactive display surface built from mobile devices. Our framework utilizes the integrated front facing camera of mobile devices to estimate the relative pose of multiple mobile screens arbitrarily placed on a table. Using this framework, users can create a large virtual display where multiple users can explore multimedia data interactively through separate windows (mobile screens). The major technical challenge is the calibration of individual displays, which is solved by visual object recognition using front facing camera inputs.
Best Paper Award in MUM12
Image Retrieval for Image-Based Localization Revisited
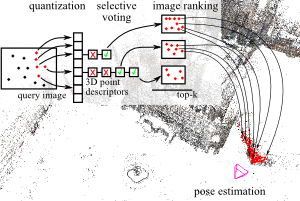
To reliably determine the camera pose of an image relative to a 3D point cloud of a scene, correspondences between 2D features and 3D points are needed. Recent work has demonstrated that directly matching the features against the points outperforms methods that take an intermediate image retrieval step in terms of the number of images that can be localized successfully. Yet, direct matching is inherently less scalable than retrieval-based approaches. In this paper, we therefore analyze the algorithmic factors that cause the performance gap and identify false positive votes as the main source of the gap. Based on a detailed experimental evaluation, we show that retrieval methods using a selective voting scheme are able to outperform state-of-the-art direct matching methods. We explore how both selective voting and correspondence computation can be accelerated by using a Hamming embedding of feature descriptors. Furthermore, we introduce a new dataset with challenging query images for the evaluation of image-based localization.
Variational Tangent Plane Intersection for Planar Polygonal Meshing
Several theoretical and practical geometry applications are based on polygon meshes with planar faces. The planar panelization of freeform surfaces is a prominent example from the field of architectural geometry. One approach to obtain a certain kind of such meshes is by intersection of suitably distributed tangent planes. Unfortunately, this simple tangent plane intersection (TPI) idea is limited to the generation of hex-dominant meshes: as vertices are in general defined by three intersecting planes, the resulting meshes are basically duals of triangle meshes.
The explicit computation of intersection points furthermore requires dedicated handling of special cases and degenerate constellations to achieve robustness on freeform surfaces. Another limitation is the small number of degrees of freedom for incorporating design parameters.
Using a variational re-formulation, we equip the concept of TPI with additional degrees of freedom and present a robust, unified approach for creating polygonal structures with planar faces that is readily able to integrate various objectives and constraints needed in different applications scenarios. We exemplarily demonstrate the abilities of our approach on three common problems in geometry processing.
Practical Mixed-Integer Optimization for Geometry Processing
Proceedings of Curves and Surfaces 2010
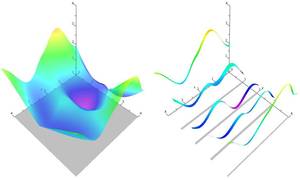
Solving mixed-integer problems, i.e., optimization problems where some of the unknowns are continuous while others are discrete, is NP-hard. Unfortunately, real-world problems like e.g., quadrangular remeshing usually have a large number of unknowns such that exact methods become unfeasible. In this article we present a greedy strategy to rapidly approximate the solution of large quadratic mixed-integer problems within a practically sufficient accuracy. The algorithm, which is freely available as an open source library implemented in C++, determines the values of the discrete variables by successively solving relaxed problems. Additionally the specification of arbitrary linear equality constraints which typically arise as side conditions of the optimization problem is possible. The performance of the base algorithm is strongly improved by two novel extensions which are (1) simultaneously estimating sets of discrete variables which do not interfere and (2) a fill-in reducing reordering of the constraints. Exemplarily the solver is applied to the problem of quadrilateral surface remeshing, enabling a great flexibility by supporting different types of user guidance within a real-time modeling framework for input surfaces of moderate complexity.
Poster: VisNEST - Interactive Analysis of Neural Activity Data
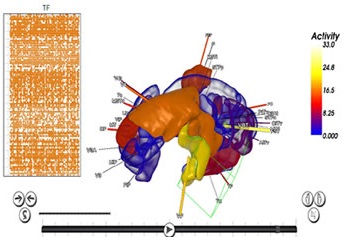
Modeling and simulating a brain’s connectivity produces an immense
amount of data, which has to be analyzed in a timely fashion.
Neuroscientists are currently modeling parts of the brain –
e.g. the visual cortex – of primates like Macaque monkeys in order
to deduce functionality and transfer newly gained insights to
the human brain. Current research leverages the power of today’s
High Performance Computing (HPC) machines in order to simulate
low level neural activity. In this paper, we describe an interactive
analysis tool that enables neuroscientists to visualize the resulting
simulation output. One of the driving challenges behind our development
is the integration of macroscopic data, e.g. brain areas, with
microscopic simulation results, e.g. spiking behavior of individual neurons.
Honorable Mention!
Insights into user experiences and acceptance of mobile indoor navigation devices
Location-based services, which can be applied in navigation systems, are a key application in mobile and ubiquitous computing. Combined with indoor localization techniques, pico projectors can be used for navigation purposes to augment the environment with navigation information. In the present empirical study (n = 24) we explore users’ perceptions, workload and navigation performance when navigating with a mobile projector in comparison to a mobile screen as indoor navigation interface. To capture user perceptions and to predict acceptance by applying structural equation modeling, we assessed perceived disorientation, privacy concerns, trust, ease of use, usefulness, and sources of visibility problems. Moreover, the impact of user factors (spatial abilities, technical self-efficacy, familiarity) on acceptance was analyzed. The structural models exhibited adequate predictive and psychometric properties. Based on real user experience, they clearly pointed out a) similarities and device-specific differences in navigation device acceptance, b) the role of specific user experiences (visibility, trust, and disorientation) during navigation device usage and c) illuminated the underlying relationships between determinants of user acceptance. Practical implications of the results and future research questions are provided.
OpenVolumeMesh - A Versatile Index-Based Data Structure for 3D Polytopal Complexes
OpenVolumeMesh is a data structure which is able to represent heterogeneous 3-dimensional polytopal cell complexes and is general enough to also represent non- manifolds without incurring undue overhead. Extending the idea of half-edge based data structures for two-manifold surface meshes, all faces, i.e. the two-dimensional entities of a mesh, are represented by a pair of oriented half-faces. The concept of using directed half-entities enables inducing an orientation to the meshes in an intuitive and easy to use manner. We pursue the idea of encoding connectivity by storing first-order top-down incidence relations per entity, i.e. for each entity of dimension d, a list of links to the respective incident entities of dimension d?1 is stored. For instance, each half-face as well as its orientation is uniquely determined by a tuple of links to its incident half- edges or each 3D cell by the set of incident half-faces. This representation allows for handling non-manifolds as well as mixed-dimensional mesh configurations. No entity is duplicated according to its valence, instead, it is shared by all incident entities in order to reduce memory consumption. Furthermore, an array-based storage layout is used in combination with direct index-based access. This guarantees constant access time to the entities of a mesh. Although bottom-up incidence relations are implied by the top-down incidences, our data structure provides the option to explicitly generate and cache them in a transparent manner. This allows for accelerated navigation in the local neighbor- hood of an entity. We provide an open-source and platform-independent implementation of the proposed data structure written in C++ using dynamic typing paradigms. The li- brary is equipped with a set of STL compliant iterators, a generic property system to dynamically attach properties to all entities at run-time, and a serializer/deseri- alizer supporting a simple file format. Due to its similarity to the OpenMesh data structure, it is easy to use, in particular for those familiar with OpenMesh. Since the presented data structure is compact, intuitive, and efficient, it is suitable for a variety of applications, such as meshing, visualization, and numerical analysis. OpenVolumeMesh is open-source software licensed under the terms of the LGPL.
Golden Ratio Sequences for Low-Discrepancy Sampling
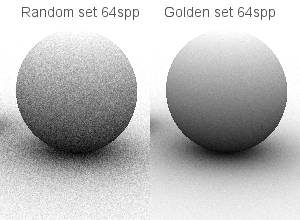
Most classical constructions of low-discrepancy point sets are based on generalizations of the one-dimensional binary van der Corput sequence, whose implementation requires nontrivial bit-operations. As an alternative, we introduce the quasi-regular golden ratio sequences, which are based on the fractional part of successive integer multiples of the golden ratio. By leveraging results from number theory, we show that point sets, which evenly cover the unit square or disc, can be computed by a simple incremental permutation of a generator golden ratio sequence. We compare ambient occlusion images generated with a Monte Carlo ray tracer based on random, Hammersley, blue noise, and golden ratio point sets. The source code of the ray tracer used for our experiments is available online at the address provided at the end of this article.
The Design of a Segway AR-Tactile Navigation System
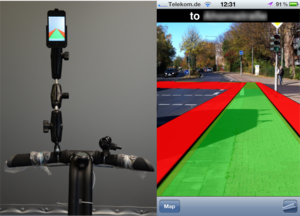
A Segway is often used to transport a user across mid range distances in urban environments. It has more degrees of freedom than car/bike and is faster than pedestrian. However a navigation system designed for it has not been researched. The existing navigation systems are adapted for car drivers or pedestrians. Using such systems on the Segway can increase the driver’s cognitive workload and generate safety risks. In this paper, we present a Segway AR-Tactile navigation system, in which we visualize the route through an Augmented Reality interface displayed by a mobile phone. The turning instructions are presented to the driver via vibro-tactile actuators attached to the handlebar. Multiple vibro-tactile patterns provide navigation instructions. We evaluate the system in real traffic and an artificial environment. Our results show the AR interface reduces users’ subjective workload significantly. The vibro-tactile patterns can be perceived correctly and greatly improve the driving performance.
Towards Fast Image-Based Localization on a City-Scale
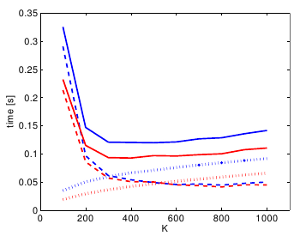
Recent developments in Structure-from-Motion approaches allow the reconstructions of large parts of urban scenes. The available models can in turn be used for accurate image-based localization via pose estimation from 2D-to-3D correspondences. In this paper, we analyze a recently proposed localization method that achieves state-of-the-art localization performance using a visual vocabulary quantization for efficient 2D-to-3D correspondence search. We show that using only a subset of the original models allows the method to achieve a similar localization performance. While this gain can come at additional computational cost depending on the dataset, the reduced model requires significantly less memory, allowing the method to handle even larger datasets. We study how the size of the subset, as well as the quantization, affect both the search for matches and the time needed by RANSAC for pose estimation.
The original publication will be available at www.springerlink.com upon publication.
Digitization of Inaccessible Archeological Sites with Autonomous Mobile Robots
Exploiting Graphics Adapters for Computational Biology
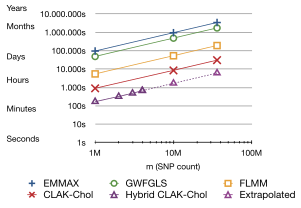
Accelerate Genome-Wide Association Studies (GWAS) by performing the most demanding computation on the GPU in a batched, streamed fashion. Involves huge data size (terabytes), streaming, asynchronicity, parallel computation and some more buzzwords.
@MastersThesis{Beyer2012GWAS,
author = {Lucas Beyer},
title = {{Exploiting Graphics Adapters for Computational Biology}},
school = {RWTH Aachen (AICES)},
address = {Aachen, Germany},
year = {2012},
}
Fusing Structured Light Consistency and Helmholtz Normals for 3D Reconstruction
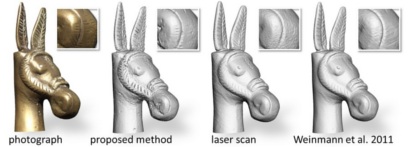
In this paper, we propose a 3D reconstruction approach which combines a structured light based consistency measure with dense normal information obtained by exploiting the Helmholtz reciprocity principle. This combination compensates for the individual limitations of techniques providing normal information, which are mainly affected by low-frequency drift, and those providing positional information, which are often not well-suited to recover fine details. To obtain Helmholtz reciprocal samples, we employ a turntable-based setup. Due to the reciprocity, the structured light directly provides the occlusion information needed during the normal estimation for both the cameras and light sources. We perform the reconstruction by solving one global variational problem which integrates all available measurements simultaneously, over all cameras, light source positions and turntable rotations. For this, we employ an octree-based continuous min-cut framework in order to alleviate metrification errors while maintaining memory efficiency. We evaluate the performance of our algorithm both on synthetic and real-world data.
Material Recognition.
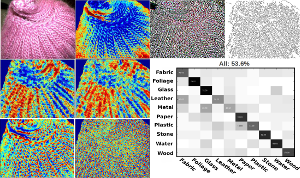
Material recognition is an important subtask in computer vision. In this paper, we aim for the identification of material categories from a single image captured under unknown illumination and view conditions. Therefore, we use several features which cover various aspects of material appearance and perform supervised classification using Support Vector Machines. We demonstrate the feasibility of our approach by testing on the challenging Flickr Material Database. Based on this dataset, we also carry out a comparison to a previously published work [Liu et al., ”Exploring Features in a Bayesian Framework for Material Recognition”, CVPR 2010] which uses Bayesian inference and reaches a recognition rate of 44.6% on this dataset and represents the current state-of the-art. With our SVM approach we obtain 53.1% and hence, significantly outperform this approach.
Improved Ramsey-based Büchi Complementation
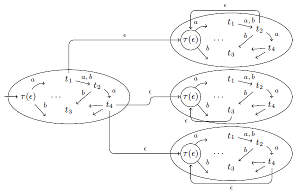
We consider complementing Büchi automata by applying the Ramsey-based approach, which is the original approach already used by Büchi and later improved by Sistla et al. We present several heuristics to reduce the state space of the resulting complement automaton and provide experimental data that shows that our improved construction can compete (in terms of finished complementation tasks) also in practice with alternative constructions like rank-based complementation. Furthermore, we show how our techniques can be used to improve the Ramsey-based complementation such that the asymptotic upper bound for the resulting complement automaton is 2^O(n log n) instead of 2^O(n2).
@incollection{breuers2012improved,
title={Improved Ramsey-based B{\"u}chi Complementation},
author={Breuers, Stefan and L{\"o}ding, Christof and Olschewski, J{\"o}rg},
booktitle={Foundations of Software Science and Computational Structures},
pages={150--164},
year={2012},
publisher={Springer}
}
CAVIR: Correspondence Analysis in Virtual Reality. Ways to a Valid Interpretation of Correspondence Analytical Point Clouds in Virtual Environments

Correspondence Analysis (CA) is frequently used to interpret correlations between categorical variables in the area of market research. To do so, coherences of variables are converted to a three-dimensional point cloud and plotted as three different 2D-mappings. The major challenge is to correctly interpret these plottings. Due to a missing axis, distances can easily be under- or overestimated. This can lead to a misclustering and misinterpretation of data and thus to faulty conclusions. To address this problem we present CAVIR, an approach for CA in Virtual Reality. It supports users with a virtual three-dimensional representation of the point cloud and different options to show additional information, to measure Euclidean distances, and to cluster points. Besides, the free rotation of the entire point cloud enables the CA user to always have a correct view of the data.
@Article{Graff2012,
Title = {{CAVIR}: {C}orrespondence {A}nalysis in {V}irtual {R}eality. {W}ays to a {V}alid {I}nterpretation of {C}orrespondence {A}nalytical {P}oint {C}louds in {V}irtual {E}nvironments},
Author = {Frederik Graff and Andrea B\"{o}nsch and Daniel B\"{u}ndgens and Torsten Kuhlen},
Journal = {{C}onference {P}roceedings: {I}nternational {M}asaryk {C}onference for {P}h.{D}. {S}tudents and {Y}oung {R}esearchers},
Year = {2012},
Pages = {653-662},
Volume = {3},
Url = {http://www.vedeckekonference.cz/library/proceedings/mmk_2012.pdf}
}
CAVIR: Correspondence Analysis in Virtual Reality

Correspondence Analysis (CA) is used to interpret correlations between categorical variables in the areas of social science and market research. To do so, coherences of variables are converted to a three-dimensional point cloud and plotted as several different 2D-mappings, each containing two axes. The major challenge is to correctly interpret these plottings. Due to a missing axis, distances can easily be under- or overestimated. This can lead to a misinterpretation and thus a misclustering of data.
To address this problem we present CAVIR, an approach for CA in Virtual Reality. It supports users with a three-dimensional representation of the point cloud and different options to show additional information, to measure Euclidean distances, and to cluster points. Besides, the motion parallax and a free rotation of the entire point cloud enable the CA expert to always have a correct view of the data.
Best Presentation Award!
@Article{Boensch2012,
Title = {{CAVIR}: {C}orrespondence {A}nalysis in {V}irtual {R}eality},
Author = {Andrea B\"{o}nsch and Frederik Graff and Daniel B\"{u}ndgens and Torsten Kuhlen},
Journal = {{V}irtuelle und {E}rweiterte {R}ealit\"at, 9. {W}orkshop der {GI}-{F}achgruppe {VR}/{AR}},
Year = {2012},
Pages = {49-60},
ISSN = {978-3-8440-1309-2}
Publisher = {Shaker Verlag},
}
Discovering Favorite Views of Popular Places with Iconoid Shift
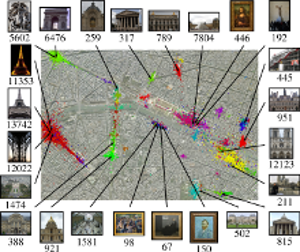
In this paper, we propose a novel algorithm for automatic landmark building discovery in large, unstructured image collections. In contrast to other approaches which aim at a hard clustering, we regard the task as a mode estimation problem. Our algorithm searches for local attractors in the image distribution that have a maximal mutual homography overlap with the images in their neighborhood. Those attractors correspond to central, iconic views of single objects or buildings, which we efficiently extract using a medoid shift search with a novel distance measure. We propose efficient algorithms for performing this search. Most importantly, our approach performs only an efficient local exploration of the matching graph that makes it applicable for large-scale analysis of photo collections. We show experimental results validating our approach on a dataset of 500k images of the inner city of Paris.
@inproceedings{DBLP:conf/iccv/WeyandL11,
author = {Tobias Weyand and
Bastian Leibe},
title = {Discovering favorite views of popular places with iconoid shift},
booktitle = {{IEEE} International Conference on Computer Vision, {ICCV} 2011, Barcelona,
Spain, November 6-13, 2011},
pages = {1132--1139},
year = {2011},
crossref = {DBLP:conf/iccv/2011},
url = {http://dx.doi.org/10.1109/ICCV.2011.6126361},
doi = {10.1109/ICCV.2011.6126361},
timestamp = {Thu, 19 Jan 2012 18:05:15 +0100},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/iccv/WeyandL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Level-Set Person Segmentation and Tracking with Multi-Region Appearance Models and Top-Down Shape Information
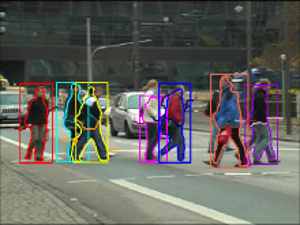
In this paper, we address the problem of segmentationbased tracking of multiple articulated persons. We propose two improvements to current level-set tracking formulations. The first is a localized appearance model that uses additional level-sets in order to enforce a hierarchical subdivision of the object shape into multiple connected regions with distinct appearance models. The second is a novel mechanism to include detailed object shape information in the form of a per-pixel figure/ground probability map obtained from an object detection process. Both contributions are seamlessly integrated into the level-set framework. Together, they considerably improve the accuracy of the tracked segmentations. We experimentally evaluate our proposed approach on two challenging sequences and demonstrate its good performance in practice.
@inproceedings{DBLP:conf/iccv/HorbertRL11,
author = {Esther Horbert and
Konstantinos Rematas and
Bastian Leibe},
title = {Level-set person segmentation and tracking with multi-region appearance
models and top-down shape information},
booktitle = {{IEEE} International Conference on Computer Vision, {ICCV} 2011, Barcelona,
Spain, November 6-13, 2011},
pages = {1871--1878},
year = {2011},
crossref = {DBLP:conf/iccv/2011},
url = {http://dx.doi.org/10.1109/ICCV.2011.6126455},
doi = {10.1109/ICCV.2011.6126455},
timestamp = {Thu, 19 Jan 2012 18:05:15 +0100},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/iccv/HorbertRL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Fast Image-Based Localization using Direct 2D-to-3D Matching
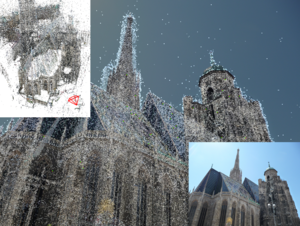
Estimating the position and orientation of a camera given an image taken by it is an important step in many interesting applications such as tourist navigations, robotics, augmented reality and incremental Structure-from-Motion reconstruction. To do so, we have to find correspondences between structures seen in the image and a 3D representation of the scene. Due to the recent advances in the field of Structure-from-Motion it is now possible to reconstruct large scenes up to the level of an entire city in very little time. We can use these results to enable image-based localization of a camera (and its user) on a large scale. However, when processing such large data, the computation between points in the image and points in the model quickly becomes the bottleneck of the localization pipeline. Therefore, it is extremely important to develop methods that are able to effectively and efficiently handle such large environments and that scale well to even larger scenes.
Multi-Class Image Labeling with Top-Down Segmentation and Generalized Robust P^N Potentials

We propose a novel formulation for the scene labeling problem which is able to combine object detections with pixel-level information in a Conditional Random Field (CRF) framework. Since object detection and multi-class image labeling are mutually informative problems, pixel-wise segmentation can benefit from powerful object detectors and vice versa. The main contribution of the current work lies in the incorporation of topdown object segmentations as generalized robust P N potentials into the CRF formulation. These potentials present a principled manner to convey soft object segmentations into a unified energy minimization framework, enabling joint optimization and thus mutual benefit for both problems. As our results show, the proposed approach outperforms the state-of-the-art methods on the categories for which object detections are available. Quantitative and qualitative experiments show the effectiveness of the proposed method.
@inproceedings{DBLP:conf/bmvc/FlorosRL11,
author = {Georgios Floros and
Konstantinos Rematas and
Bastian Leibe},
title = {Multi-Class Image Labeling with Top-Down Segmentation and Generalized
Robust {\textdollar}P{\^{}}N{\textdollar} Potentials},
booktitle = {British Machine Vision Conference, {BMVC} 2011, Dundee, UK, August
29 - September 2, 2011. Proceedings},
pages = {1--11},
year = {2011},
crossref = {DBLP:conf/bmvc/2011},
url = {http://dx.doi.org/10.5244/C.25.79},
doi = {10.5244/C.25.79},
timestamp = {Wed, 24 Apr 2013 17:19:07 +0200},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/bmvc/FlorosRL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Real-Time Multi-Person Tracking with Time-Constrained Detection
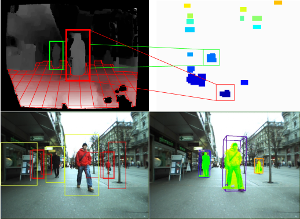
This paper presents a robust real-time multi-person tracking framework for busy street scenes. Tracking-by-detection approaches have recently been successfully applied to this task. However, their run-time is still limited by the computationally expensive object detection component. In this paper, we therefore consider the problem of making best use of an object detector with a fixed and very small time budget. The question we ask is: given a fixed time budget that allows for detector-based verification of k small regions-of-interest (ROIs) in the image, what are the best regions to attend to in order to obtain stable tracking performance? We address this problem by applying a statistical Poisson process model in order to rate the urgency by which individual ROIs should be attended to. These ROIs are initially extracted from a 3D depth-based occupancy map of the scene and are then tracked over time. This allows us to balance the system resources in order to satisfy the twin goals of detecting newly appearing objects, while maintaining the quality of existing object trajectories.
@inproceedings{DBLP:conf/bmvc/MitzelSL11,
author = {Dennis Mitzel and
Patrick Sudowe and
Bastian Leibe},
title = {Real-Time Multi-Person Tracking with Time-Constrained Detection},
booktitle = {British Machine Vision Conference, {BMVC} 2011, Dundee, UK, August
29 - September 2, 2011. Proceedings},
pages = {1--11},
year = {2011},
crossref = {DBLP:conf/bmvc/2011},
url = {http://dx.doi.org/10.5244/C.25.104},
doi = {10.5244/C.25.104},
timestamp = {Wed, 24 Apr 2013 17:19:07 +0200},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/bmvc/MitzelSL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Lying Pose Recognition for Elderly Fall Detection
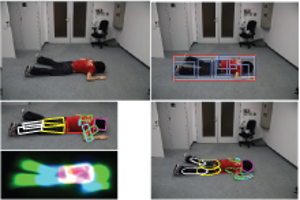
This paper proposes a pipeline for lying pose recognition from single images, which is designed for health-care robots to find fallen people. We firstly detect object bounding boxes by a mixture of viewpoint-specific part based model detectors and later estimate a detailed configuration of body parts on the detected regions by a finer tree-structured model. Moreover, we exploit the information provided by detection to infer a reasonable limb prior for the pose estimation stage. Additional robustness is achieved by integrating a viewpointspecific foreground segmentation into the detection and body pose estimation stages. This step yields a refinement of detection scores and a better color model to initialize pose estimation. We apply our proposed approach to challenging data sets of fallen people in different scenarios. Our quantitative and qualitative results demonstrate that the part-based model significantly outperforms a holistic model based on same feature type for lying pose detection. Moreover, our system offers a reasonable estimation for the body configuration of varying lying poses.
@inproceedings{DBLP:conf/rss/WangZL11,
author = {Simin Wang and
Salim Zabir and
Bastian Leibe},
title = {Lying Pose Recognition for Elderly Fall Detection},
booktitle = {Robotics: Science and Systems VII, University of Southern California,
Los Angeles, CA, USA, June 27-30, 2011},
year = {2011},
crossref = {DBLP:conf/rss/2011},
url = {http://www.roboticsproceedings.org/rss07/p44.html},
timestamp = {Sun, 18 Dec 2011 20:27:03 +0100},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/rss/WangZL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Online Multi-Person Tracking-by-Detection from a Single, Uncalibrated Camera

In this paper, we address the problem of automatically detecting and tracking a variable number of persons in complex scenes using a monocular, potentially moving, uncalibrated camera. We propose a novel approach for multi-person tracking-bydetection in a particle filtering framework. In addition to final high-confidence detections, our algorithm uses the continuous confidence of pedestrian detectors and online trained, instance-specific classifiers as a graded observation model. Thus, generic object category knowledge is complemented by instance-specific information. The main contribution of this paper is to explore how these unreliable information sources can be used for robust multi-person tracking. The algorithm detects and tracks a large number of dynamically moving persons in complex scenes with occlusions, does not rely on background modeling, requires no camera or ground plane calibration, and only makes use of information from the past. Hence, it imposes very few restrictions and is suitable for online applications. Our experiments show that the method yields good tracking performance in a large variety of highly dynamic scenarios, such as typical surveillance videos, webcam footage, or sports sequences. We demonstrate that our algorithm outperforms other methods that rely on additional information. Furthermore, we analyze the influence of different algorithm components on the robustness.
@article{Breitenstein:2011:OMT:2006854.2007007,
author = {Breitenstein, Michael D. and Reichlin, Fabian and Leibe, Bastian and Koller-Meier, Esther and Van Gool, Luc},
title = {Online Multiperson Tracking-by-Detection from a Single, Uncalibrated Camera},
journal = {IEEE Trans. Pattern Anal. Mach. Intell.},
issue_date = {September 2011},
volume = {33},
number = {9},
month = sep,
year = {2011},
issn = {0162-8828},
pages = {1820--1833},
numpages = {14},
url = {http://dx.doi.org/10.1109/TPAMI.2010.232},
doi = {10.1109/TPAMI.2010.232},
acmid = {2007007},
publisher = {IEEE Computer Society},
address = {Washington, DC, USA},
keywords = {Multi-object tracking, tracking-by-detection, detector confidence particle filter, pedestrian detection, particle filtering, sequential Monte Carlo estimation, online learning, detector confidence, surveillance, sports analysis, traffic safety.},
}
Global Structure Optimization of Quadrilateral Meshes
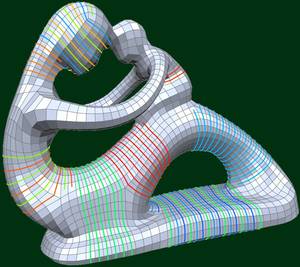
We introduce a fully automatic algorithm which optimizes the high-level structure of a given quadrilateral mesh to achieve a coarser quadrangular base complex. Such a topological optimization is highly desirable, since state-of-the-art quadrangulation techniques lead to meshes which have an appropriate singularity distribution and an anisotropic element alignment, but usually they are still far away from the high-level structure which is typical for carefully designed meshes manually created by specialists and used e.g. in animation or simulation. In this paper we show that the quality of the high-level structure is negatively affected by helical configurations within the quadrilateral mesh. Consequently we present an algorithm which detects helices and is able to remove most of them by applying a novel grid preserving simplification operator (GP-operator) which is guaranteed to maintain an all-quadrilateral mesh. Additionally it preserves the given singularity distribution and in particular does not introduce new singularities. For each helix we construct a directed graph in which cycles through the start vertex encode operations to remove the corresponding helix. Therefore a simple graph search algorithm can be performed iteratively to remove as many helices as possible and thus improve the high-level structure in a greedy fashion. We demonstrate the usefulness of our automatic structure optimization technique by showing several examples with varying complexity.
Procedural Modeling of Interconnected Structures
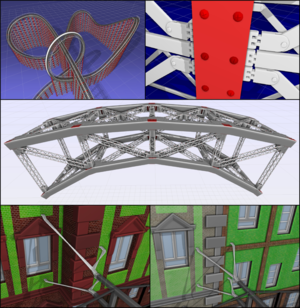
The complexity and detail of geometric scenes that are used in today's computer animated films and interactive games have reached a level where the manual creation by traditional 3D modeling tools has become infeasible. This is why procedural modeling concepts have been developed which generate highly complex 3D models by automatically executing a set of formal construction rules. Well-known examples are variants of L-systems which describe the bottom-up growth process of plants and shape grammars which define architectural buildings by decomposing blocks in a top-down fashion. However, none of these approaches allows for the easy generation of interconnected structures such as bridges or roller coasters where a functional interaction between rigid and deformable parts of an object is needed. Our approach mainly relies on the top-down decomposition principle of shape grammars to create an arbitrarily complex but well structured layout. During this process, potential attaching points are collected in containers which represent the set of candidates to establish interconnections. Our grammar then uses either abstract connection patterns or geometric queries to determine elements in those containers that are to be connected. The two different types of connections that our system supports are rigid object chains and deformable beams. The former type is constructed by inverse kinematics, the latter by spline interpolation. We demonstrate the descriptive power of our grammar by example models of bridges, roller coasters, and wall-mounted catenaries.
Walking On Broken Mesh: Defect-Tolerant Geodesic Distances and Parameterizations
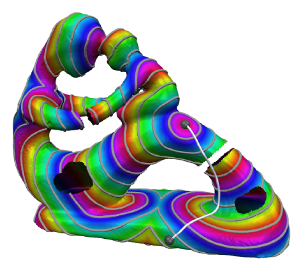
Efficient methods to compute intrinsic distances and geodesic paths have been presented for various types of surface representations, most importantly polygon meshes. These meshes are usually assumed to be well-structured and manifold. In practice, however, they often contain defects like holes, gaps, degeneracies, non-manifold configurations – or they might even be just a soup of polygons. The task of repairing these defects is computationally complex and in many cases exhibits various ambiguities demanding tedious manual efforts. We present a computational framework that enables the computation of meaningful approximate intrinsic distances and geodesic paths on raw meshes in a way which is tolerant to such defects. Holes and gaps are bridged up to a user-specified tolerance threshold such that distances can be computed plausibly even across multiple connected components of inconsistent meshes. Further, we show ways to locally parameterize a surface based on geodesic distance fields, easily facilitating the application of textures and decals on raw meshes. We do all this without explicitly repairing the input, thereby avoiding the costly additional efforts. In order to enable broad applicability we provide details on two implementation variants, one optimized for performance, the other optimized for memory efficiency. Using the presented framework many applications can readily be extended to deal with imperfect meshes. Since we abstract from the input applicability is not even limited to meshes, other representations can be handled as well.
Robust Real-Time Deformation of Incompressible Surface Meshes

We introduce an efficient technique for robustly simulating incompressible objects with thousands of elements in real-time. Instead of considering a tetrahedral model, commonly used to simulate volumetric bodies, we simply use their surfaces. Not requiring hundreds or even thousands of elements in the interior of the object enables us to simulate more elements on the surface, resulting in high quality deformations at low computation costs. The elasticity of the objects is robustly simulated with a geometrically motivated shape matching approach which is extended by a fast summation technique for arbitrary triangle meshes suitable for an efficient parallel computation on the GPU. Moreover, we present an oscillation-free and collision-aware volume constraint, purely based on the surface of the incompressible body. The novel heuristic we propose in our approach enables us to conserve the volume, both globally and locally. Our volume constraint is not limited to the shape matching method and can be used with any method simulating the elasticity of an object. We present several examples which demonstrate high quality volume conserving deformations and compare the run-times of our CPU implementation, as well as our GPU implementation with similar methods.
SCA 2011 Honorable Mention
@INPROCEEDINGS{Diziol2011,
author = {Raphael Diziol and Jan Bender and Daniel Bayer},
title = {Robust Real-Time Deformation of Incompressible Surface Meshes},
booktitle = {Proceedings of the 2011 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2011},
publisher = {Eurographics Association},
location = {Vancouver, Canada}
}
Online Loop Closure for Real-time Interactive 3D Scanning

We present a real-time interactive 3D scanning system that allows users to scan complete object geometry by turning the object around in front of a real-time 3D range scanner. The incoming 3D surface patches are registered and integrated into an online 3D point cloud. In contrast to previous systems the online reconstructed 3D model also serves as final result. Registration error accumulation which leads to the well-known loop closure problem is addressed already during the scanning session by distorting the object as rigidly as possible. Scanning errors are removed by explicitly handling outliers based on visibility constraints. Thus, no additional post-processing is required which otherwise might lead to artifacts in the model reconstruction. Both geometry and texture are used for registration which allows for a wide range of objects with different geometric and photometric properties to be scanned. We show the results of our modeling approach on several difficult real-world objects. Qualitative and quantitative results are given for both synthetic and real data demonstrating the importance of online loop closure and outlier handling for model reconstruction. We show that our real-time scanning system has comparable accuracy to offline methods with the additional benefit of immediate feedback and results.
@article{DBLP:journals/cviu/WeiseWLG11,
author = {Thibaut Weise and
Thomas Wismer and
Bastian Leibe and
Luc J. Van Gool},
title = {Online loop closure for real-time interactive 3D scanning},
journal = {Computer Vision and Image Understanding},
volume = {115},
number = {5},
pages = {635--648},
year = {2011},
url = {http://dx.doi.org/10.1016/j.cviu.2010.11.023},
doi = {10.1016/j.cviu.2010.11.023},
timestamp = {Mon, 18 Apr 2011 08:20:18 +0200},
biburl = {http://dblp.uni-trier.de/rec/bib/journals/cviu/WeiseWLG11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Efficient and Accurate Urban Outdoor Radio Wave Propagation
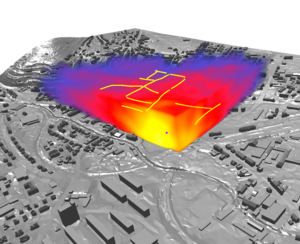
Simulating Radio Wave Propagation using geometrical optics is a well known method. We introduce and compare a simplified 2D beam tracing and a very general 3D ray tracing approach, called photon path tracing. Both methods are designed for outdoor, urban scenarios. The 2D approach is computationally less expensive and can still model an important part of propagation effects. The 3D approach is more general, and not limited to outdoor scenarios, and does not impose constraints or assumptions on the scene geometry. We develop methods to adapt the simulation parameters to real measurements and compare the accuracy of both presented algorithms.
Fast PRISM: Branch and Bound Hough Transform for Object Class Detection
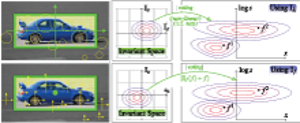
This paper addresses the task of efficient object class detection by means of the Hough transform. This approach has been made popular by the Implicit Shape Model (ISM) and has been adopted many times. Although ISM exhibits robust detection performance, its probabilistic formulation is unsatisfactory. The PRincipled Implicit Shape Model (PRISM) overcomes these problems by interpreting Hough voting as a dual implementation of linear sliding-window detection. It thereby gives a sound justification to the voting procedure and imposes minimal constraints. We demonstrate PRISM’s flexibility by two complementary implementations: a generatively trained Gaussian Mixture Model as well as a discriminatively trained histogram approach. Both systems achieve state-of-the-art performance. Detections are found by gradient-based or branch and bound search, respectively. The latter greatly benefits from PRISM’s feature-centric view. It thereby avoids the unfavorable memory trade-off and any on-line pre-processing of the original Efficient Subwindow Search (ESS). Moreover, our approach takes account of the features’ scale value while ESS does not. Finally, we show how to avoid soft-matching and spatial pyramid descriptors during detection without losing their positive effect. This makes algorithms simpler and faster. Both are possible if the object model is properly regularized and we discuss a modification of SVMs which allows for doing so.
@article{DBLP:journals/ijcv/LehmannLG11,
author = {Alain D. Lehmann and
Bastian Leibe and
Luc J. Van Gool},
title = {Fast {PRISM:} Branch and Bound Hough Transform for Object Class Detection},
journal = {International Journal of Computer Vision},
volume = {94},
number = {2},
pages = {175--197},
year = {2011},
url = {http://dx.doi.org/10.1007/s11263-010-0342-x},
doi = {10.1007/s11263-010-0342-x},
timestamp = {Wed, 19 Feb 2014 09:33:24 +0100},
biburl = {http://dblp.uni-trier.de/rec/bib/journals/ijcv/LehmannLG11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Online Estimation of B-Spline Mixture Models From TOF-PET List-Mode Data
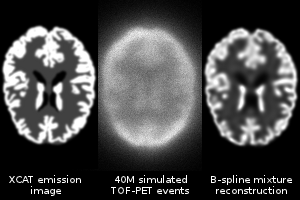
In emission tomography, images are usually represented by regular grids of voxels or overlapping smooth image elements (blobs). Few other image models have been proposed like tetrahedral meshes or point clouds that are adapted to an anatomical image. This work proposes a practical sparse and continuous image model inspired from the field of parametric density estimation for Gaussian mixture models. The position, size, aspect ratio and orientation of each image element is optimized as well as its weight with a very fast online estimation method. Furthermore, the number of mixture components, hence the image resolution, is locally adapted according to the available data. The system model is represented in the same basis as image elements and captures time of flight and positron range effects in an exact way. Computations use apodized B-spline approximations of Gaussians and simple closed-form analytical expressions without any sampling or interpolation. In consequence, the reconstructed image never suffers from spurious aliasing artifacts. Noiseless images of the XCAT brain phantom were reconstructed from simulated data.
Simulating inextensible cloth using locking-free triangle meshes

This paper presents an efficient method for the dynamic simulation of inextensible cloth. The triangle mesh for our cloth model is simulated using an impulse-based approach which is able to solve hard constraints. Using hard distance constraints on the edges of the triangle mesh removes too many degrees of freedom, resulting in a rigid motion. This is known as the locking problem which is typically solved by using rectangular meshes in existing impulse-based simulations. We solve this problem by using a nonconforming representation for the simulation model which unfortunately results in a discontinuous mesh. Therefore, we couple the original conforming mesh with the nonconforming elements and use it for collision handling and visualization.
@inproceedings{Bender11,
author = {Jan Bender and Raphael Diziol and Daniel Bayer},
title = {Simulating inextensible cloth using locking-free triangle meshes},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2011},
month = dec,
address = {Lyon (France)},
pages = {11-17}
}
Real Time Vision Based Multi-person Tracking for Mobile Robotics and Intelligent Vehicles
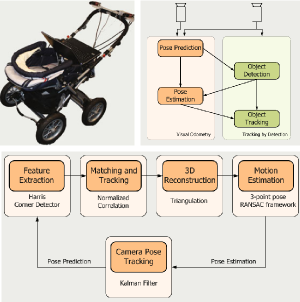
In this paper, we present a real-time vision-based multiperson tracking system working in crowded urban environments. Our approach combines stereo visual odometry estimation, HOG pedestrian detection, and multi-hypothesis tracking-by-detection to a robust tracking framework that runs on a single laptop with a CUDA-enabled graphics card. Through shifting the expensive computations to the GPU and making extensive use of scene geometry constraints we could build up a mobile system that runs with 10Hz. We experimentally demonstrate on several challenging sequences that our approach achieves competitive tracking performance.
@inproceedings{DBLP:conf/icira/MitzelFSZL11,
author = {Dennis Mitzel and
Georgios Floros and
Patrick Sudowe and
Benito van der Zander and
Bastian Leibe},
title = {Real Time Vision Based Multi-person Tracking for Mobile Robotics and
Intelligent Vehicles},
booktitle = {Intelligent Robotics and Applications - 4th International Conference,
{ICIRA} 2011, Aachen, Germany, December 6-8, 2011, Proceedings, Part
{II}},
pages = {105--115},
year = {2011},
crossref = {DBLP:conf/icira/2011-2},
url = {http://dx.doi.org/10.1007/978-3-642-25489-5_11},
doi = {10.1007/978-3-642-25489-5_11},
timestamp = {Fri, 02 Dec 2011 12:36:17 +0100},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/icira/MitzelFSZL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Efficient Use of Geometric Constraints for Sliding-Window Object Detection in Video
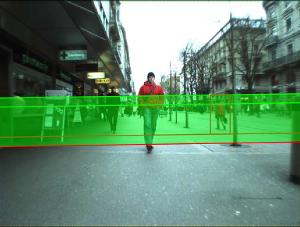
We systematically investigate how geometric constraints can be used for efficient sliding-window object detection. Starting with a general characterization of the space of sliding-window locations that correspond to geometrically valid object detections, we derive a general algorithm for incorporating ground plane constraints directly into the detector computation. Our approach is indifferent to the choice of detection algorithm and can be applied in a wide range of scenarios. In particular, it allows to effortlessly combine multiple different detectors and to automatically compute regions-of-interest for each of them. We demonstrate its potential in a fast CUDA implementation of the HOG detector and show that our algorithm enables a factor 2-4 speed improvement on top of all other optimizations.
Bibtex:
@InProceedings{Sudowe11ICVS,
author = {P. Sudowe and B. Leibe},
title = {{Efficient Use of Geometric Constraints for Sliding-Window Object Detection in Video}},
booktitle = {{International Conference on Computer Vision Systems (ICVS'11)}},
OPTpages = {},
year = {2011},
}
Visualizing Acoustical Simulation Data in Immersive Virtual Environments
In this contribution, we present an immersive visualization of room acoustical simulation data. In contrast to the commonly employed external viewpoint, our approach places the user inside the visualized data. The main problem with this technique is the occlusion of some data points by others. We present different solutions for this problem that allow an interactive analysis of the simulation data.
A Sketching Interface for Feature Curve Recovery of Free-Form Surfaces
Special issue on The 2009 SIAM/ACM Joint Conference on Geometric and Physical Modeling
In this paper, we present a semi-automatic approach to efficiently and robustly recover the characteristic feature curves of a given free-form surface where we do not have to assume that the input is a proper manifold. The technique supports a sketch-based interface where the user just has to roughly sketch the location of a feature by drawing a stroke directly on the input mesh. The system then snaps this initial curve to the correct position based on a graph-cut optimization scheme that takes various surface properties into account. Additional position constraints can be placed and modified manually which allows for an interactive feature curve editing functionality. We demonstrate the usefulness of our technique by applying it to two practical scenarios. At first, feature curves can be used as handles for surface deformation, since they describe the main characteristics of an object. Our system allows the user to manipulate a curve while the underlying non-manifold surface adopts itself to the deformed feature. Secondly, we apply our technique to a practical problem scenario in reverse engineering. Here, we consider the problem of generating a statistical (PCA) shape model for car bodies. The crucial step is to establish proper feature correspondences between a large number of input models. Due to the significant shape variation, fully automatic techniques are doomed to failure. With our simple and effective feature curve recovery tool, we can quickly sketch a set of characteristic features on each input model which establishes the correspondence to a pre-defined template mesh and thus allows us to generate the shape model. Finally, we can use the feature curves and the shape model to implement an intuitive modeling metaphor to explore the shape space spanned by the input models.
The paper is an extended version of the paper "A sketching interface for feature curve recovery of free-form surfaces" published at the 2009 SIAM/ACM Joint Conference on Geometric and Physical Modeling. In this extended version, we presend a second application where we use the recovered feature curves as modeling handles for surface deformation.
Realtime Compositing of Procedural Facade Textures on the GPU

The real time rendering of complex virtual city models has become more important in the last few years for many practical applications like realistic navigation or urban planning. For maximum rendering performance, the complexity of the geometry or textures can be reduced by decreasing the resolution until the data set can fully reside on the memory of the graphics card. This typically results in a low quality of the virtual city model. Alternatively, a streaming algorithm can load the high quality data set from the hard drive. However, this approach requires a large amount of persistent storage providing several gigabytes of static data. We present a system that uses a texture atlas containing atomic tiles like windows, doors or wall patterns, and that combines those elements on-the-fly directly on the graphics card. The presented approach benefits from a sophisticated randomization approach that produces lots of different facades while the grammar description itself remains small. By using a ray casting apporach, we are able to trace through transparent windows revealing procedurally generated rooms which further contributes to the realism of the rendering. The presented method enables real time rendering of city models with a high level of detail for facades while still relying on a small memory footprint.
Bimanual Haptic Simulator for Medical Training: System Architecture and Performance Measurements

In this paper we present a simulator for two-handed haptic interaction. As an application example, we chose a medical scenario that requires simultaneous interaction with a hand and a needle on a simulated patient. The system combines bimanual haptic interaction with a physics-based soft tissue simulation. To our knowledge the combination of finite element methods for the simulation of deformable objects with haptic rendering is seldom addressed, especially with two haptic devices in a non-trivial scenario. Challenges are to find a balance between real-time constraints and high computational demands for fidelity in simulation and to synchronize data between system components. The system has been successfully implemented and tested on two different hardware platforms: one mobile on a laptop and another stationary on a semi-immersive VR system. These two platforms have been chosen to demonstrate scaleability in terms of fidelity and costs. To compare performance and estimate latency, we measured timings of update loops and logged event-based timings of several components in the software.
@inproceedings {EGVE:JVRC11:039-046,
booktitle = {Joint Virtual Reality Conference of EGVE - EuroVR},
editor = {Sabine Coquillart and Anthony Steed and Greg Welch},
title = {{Bimanual Haptic Simulator for Medical Training: System Architecture and Performance Measurements}},
author = {Ullrich, Sebastian and Rausch, Dominik and Kuhlen, Torsten},
year = {2011},
pages={39--46},
publisher = {The Eurographics Association},
DOI = {10.2312/EGVE/JVRC11/039-046}
}
Markerless Reconstruction and Synthesis of Dynamic Facial Expressions
In this paper we combine methods from the field of computer vision with surface editing techniques to generate animated faces, which are all in full correspondence to each other. The inputs for our system are synchronized video streams from multiple cameras. The system produces a sequence of triangle meshes with fixed connectivity, representing the dynamics of the captured face. By carefully taking all requirements and characteristics into account we decided for the proposed system design: We deform an initial face template using movements estimated from the video streams. To increase the robustness of the reconstruction, we use a morphable model as a shape prior to initialize a surfel fitting technique which is able to precisely capture face shapes not included in the morphable model. In the deformation stage, we use a 2D mesh-based tracking approach to establish correspondences over time. We then reconstruct positions in 3D using the same surfel fitting technique, and finally use the reconstructed points to robustly deform the initially reconstructed face.
This paper is an extended version of our paper "Markerless Reconstruction of Dynamic Facial Expressions" which was published 2009 at 3-D Digital Imaging and Modeling. Besides describing the reconstruction of human faces in more detail we demonstrate the applicability of the tracked face template for automatic modeling and show how to use deformation transfer to attenuate expressions, blend expressions or how to build a statistical model, similar to a morphable model, on the dynamic movements.
Pseudo-Immersive Real-Time Display of 3D Scenes on Mobile Devices
The display of complex 3D scenes in real-time on mobile devices is difficult due to the insufficient data throughput and a relatively weak graphics performance. Hence, we propose a client-server system, where the processing of the complex scene is performed on a server and the resulting data is streamed to the mobile device. In order to cope with low transmission bitrates, the server sends new data only with a framerate of about 2 Hz. However, instead of sending plain framebuffers, the server decomposes the geometry represented by the current view's depth profile into a small set of textured polygons. This processing does not require the knowledge of geometries in the scene, i.e. the outputs of Time-of-flight camera can be handled as well. The 2.5D representation of the current frame allows the mobile device to render plausibly distorted views of the scene at high frame rates as long as the viewing direction does not change too much before the next frame arrives from the server. In order to further augment the visual experience, we use the mobile device's built-in camera or gyroscope to detect the spatial relation between the user's face and the device, so that the camera view can be changed accordingly. This produces a pseudo-immersive visual effect. Besides designing the overall system with a render-server, 3D display client, and real-time face/pose detection, our main technical contribution is a highly efficient algorithm that decomposes a frame buffer with per-pixel depth and normal information into a small set of planar regions which can be textured with the current frame. This representation is simple enough for realtime display on today's mobile devices.
Efficient Object Detection and Segmentation with a Cascaded Hough Forest ISM

Visual pedestrian/car detection is very important for mobile robotics in complex outdoor scenarios. In this paper, we propose two improvements to the popular Hough Forest object detection framework. We show how this framework can be extended to efficiently infer precise probabilistic segmentations for the object hypotheses and how those segmentations can be used to improve the final hypothesis selection. Our approach benefits from the dense sampling of a Hough Forest detector, which results in qualitatively better segmentations than previous voting based methods. We show that, compared to previous approaches, the dense feature sampling necessitates several adaptations to the segmentation framework and propose an improved formulation. In addition, we propose an efficient cascaded voting scheme that significantly reduces the effort of the Hough voting stage without loss in accuracy. We quantitatively evaluate our approach on several challenging sequences, reaching stateof-the-art performance and showing the effectiveness of the proposed framework.
@inproceedings{DBLP:conf/iccvw/RematasL11,
author = {Konstantinos Rematas and
Bastian Leibe},
title = {Efficient object detection and segmentation with a cascaded Hough
Forest {ISM}},
booktitle = {{IEEE} International Conference on Computer Vision Workshops, {ICCV}
2011 Workshops, Barcelona, Spain, November 6-13, 2011},
pages = {966--973},
year = {2011},
crossref = {DBLP:conf/iccvw/2011},
url = {http://dx.doi.org/10.1109/ICCVW.2011.6130356},
doi = {10.1109/ICCVW.2011.6130356},
timestamp = {Fri, 20 Jan 2012 17:21:11 +0100},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/iccvw/RematasL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
Real-Time Multi-Person Tracking with Detector Assisted Structure Propagation
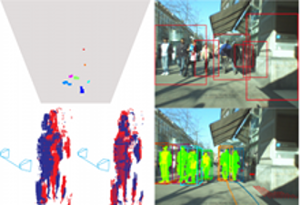
Classical tracking-by-detection approaches require a robust object detector that needs to be executed in each frame. However the detector is typically the most computationally expensive component, especially if more than one object class needs to be detected. In this paper we investigate how the usage of the object detector can be reduced by using stereo range data for following detected objects over time. To this end we propose a hybrid tracking framework consisting of a stereo based ICP (Iterative Closest Point) tracker and a high-level multi-hypothesis tracker. Initiated by a detector response, the ICP tracker follows individual pedestrians over time using just the raw depth information. Its output is then fed into the high-level tracker that is responsible for solving long-term data association and occlusion handling. In addition, we propose to constrain the detector to run only on some small regions of interest (ROIs) that are extracted from a 3D depth based occupancy map of the scene. The ROIs are tracked over time and only newly appearing ROIs are evaluated by the detector. We present experiments on real stereo sequences recorded from a moving camera setup in urban scenarios and show that our proposed approach achieves state of the art performance
@inproceedings{DBLP:conf/iccvw/MitzelL11,
author = {Dennis Mitzel and
Bastian Leibe},
title = {Real-time multi-person tracking with detector assisted structure propagation},
booktitle = {{IEEE} International Conference on Computer Vision Workshops, {ICCV}
2011 Workshops, Barcelona, Spain, November 6-13, 2011},
pages = {974--981},
year = {2011},
crossref = {DBLP:conf/iccvw/2011},
url = {http://dx.doi.org/10.1109/ICCVW.2011.6130357},
doi = {10.1109/ICCVW.2011.6130357},
timestamp = {Fri, 20 Jan 2012 17:21:11 +0100},
biburl = {http://dblp.uni-trier.de/rec/bib/conf/iccvw/MitzelL11},
bibsource = {dblp computer science bibliography, http://dblp.org}
}
OpenFlipper: An Open Source Geometry Processing and Rendering Framework
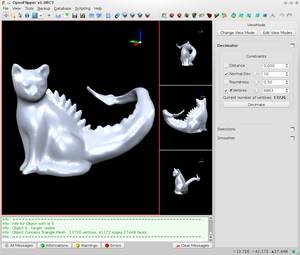
In this paper we present OpenFlipper, an extensible open source geometry processing and rendering framework. OpenFlipper is a free software toolkit and software development platform for geometry processing algorithms. It is mainly developed in the context of various academic research projects. Nevertheless some companies are already using it as a toolkit for commercial applications. This article presents the design goals for OpenFlipper, the central usability considerations and the important steps that were taken to achieve them. We give some examples of commercial applications which illustrate the exibility of OpenFlipper. Besides software developers, end users also bene t from this common framework since all applications built on top of it share the same basic functionality and interaction metaphors.
Figure-Ground Segmentation - Object Based

Tracking with a moving camera is a challenging task due to the combined effects of scene activity and egomotion. As there is no longer a static image background from which moving objects can easily be distinguished, dedicated effort must be spent on detecting objects of interest in the input images and on determining their precise extent. In recent years, there has been considerable progress in the development of approaches that apply object detection and class-specific segmentation in order to facilitate tracking under such circumstances (“tracking-by-detection”). In this chapter, we will give an overview of the main concepts and techniques used in such tracking-by-detection systems. In detail, the chapter will present fundamental techniques and current state-of-the-art approaches for performing object detection, for obtaining detailed object segmentations from single images based on top–down and bottom–up cues, and for propagating this information over time.
Visual Object Recognition

The visual recognition problem is central to computer vision research. From robotics to information retrieval, many desired applications demand the ability to identify and localize categories, places, and objects. This tutorial overviews computer vision algorithms for visual object recognition and image classification. We introduce primary representations and learning approaches, with an emphasis on recent advances in the field. The target audience consists of researchers or students working in AI, robotics, or vision who would like to understand what methods and representations are available for these problems. This lecture summarizes what is and isn't possible to do reliably today, and overviews key concepts that could be employed in systems requiring visual categorization.
Table of Contents: Introduction / Overview: Recognition of Specific Objects / Local Features: Detection and Description / Matching Local Features / Geometric Verification of Matched Features / Example Systems: Specific-Object Recognition / Overview: Recognition of Generic Object Categories / Representations for Object Categories / Generic Object Detection: Finding and Scoring Candidates / Learning Generic Object Category Models / Example Systems: Generic Object Recognition / Other Considerations and Current Challenges / Conclusions
Efficiently Navigating Data Sets Using the Hierarchy Browser
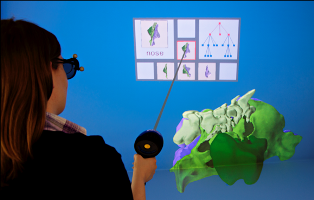
A major challenge in Virtual Reality is to enable users to efficiently explore virtual environments, regardless of prior knowledge. This is particularly true for complex virtual scenes containing a huge amount of potential areas of interest. Providing the user convenient access to these areas is of prime importance, just like supporting her to orient herself in the virtual scene. There exist techniques for either aspect, but combining these techniques into one holistic system is not trivial. To address this issue, we present the Hierarchy Browser. It supports the user in creating a mental image of the scene. This is done by offering a well-arranged, hierarchical visual representation of the scene structure as well as interaction techniques to browse it. Additional interaction allows to trigger a scene manipulation, e.g. an automated travel to a desired area of interest. We evaluate the Hierarchy Browser by means of an expert walkthrough.
@Article{Boensch2011,
Title = {{E}fficiently {N}avigating {D}ata {S}ets {U}sing the {H}ierarchy {B}rowser},
Author = {Andrea B\"{o}nsch and Sebastian Pick and Bernd Hentschel and Torsten Kuhlen},
Journal = {{V}irtuelle und {E}rweiterte {R}ealit\"at, 8. {W}orkshop der {GI}-{F}achgruppe {VR}/{AR}},
Year = {2011},
Pages = {37-48},
ISSN = {978-3-8440-0394-9}
Publisher = {Shaker Verlag}
}
Polygonal Boundary Evaluation of Minkowski Sums and Swept Volumes
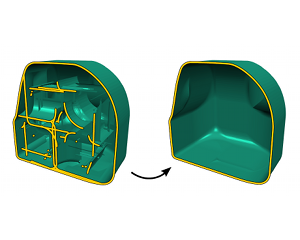
We present a novel technique for the efficient boundary evaluation of sweep operations applied to objects in polygonal boundary representation. These sweep operations include Minkowski addition, offsetting, and sweeping along a discrete rigid motion trajectory. Many previous methods focus on the construction of a polygonal superset (containing self-intersections and spurious internal geometry) of the boundary of the volumes which are swept. Only few are able to determine a clean representation of the actual boundary, most of them in a discrete volumetric setting. We unify such superset constructions into a succinct common formulation and present a technique for the robust extraction of a polygonal mesh representing the outer boundary, i.e. it makes no general position assumptions and always yields a manifold, watertight mesh. It is exact for Minkowski sums and approximates swept volumes polygonally. By using plane-based geometry in conjunction with hierarchical arrangement computations we avoid the necessity of arbitrary precision arithmetics and extensive special case handling. By restricting operations to regions containing pieces of the boundary, we significantly enhance the performance of the algorithm.
A WebService employing this method is available.
Two-Colored Pixels
In this paper we show how to use two-colored pixels as a generic tool for image processing. We apply two-colored pixels as a basic operator as well as a supporting data structure for several image processing applications. Traditionally, images are represented by a regular grid of square pixels with one constant color each. In the two-colored pixel representation, we reduce the image resolution and replace blocks of NxN pixels by one square that is split by a (feature) line into two regions with constant colors. We show how the conversion of standard mono-colored pixel images into two-colored pixel images can be computed efficiently by applying a hierarchical algorithm along with a CUDA-based implementation. Two-colored pixels overcome some of the limitations that classical pixel representations have, and their feature lines provide minimal geometric information about the underlying image region that can be effectively exploited for a number of applications. We show how to use two-colored pixels as an interactive brush tool, achieving realtime performance for image abstraction and non-photorealistic filtering. Additionally, we propose a realtime solution for image retargeting, defined as a linear minimization problem on a regular or even adaptive two-colored pixel image. The concept of two-colored pixels can be easily extended to a video volume, and we demonstrate this for the example of video retargeting.
Ad-Hoc Multi-Displays for Mobile Interactive Applications

We present a framework which enables the combination of different mobile devices into one multi-display such that visual content can be shown on a larger area consisting, e.g., of several mobile phones placed arbitrarily on the table. Our system allows the user to perform multi-touch interaction metaphors, even across different devices, and it guarantees the proper synchronization of the individual displays with low latency. Hence from the user’s perspective the heterogeneous collection of mobile devices acts like one single display and input device. From the system perspective the major technical and algorithmic challenges lie in the co-calibration of the individual displays and in the low latency synchronization and communication of user events. For the calibration we estimate the relative positioning of the displays by visual object recognition and an optional manual calibration step.
Exact and Robust (Self-)Intersections for Polygonal Meshes
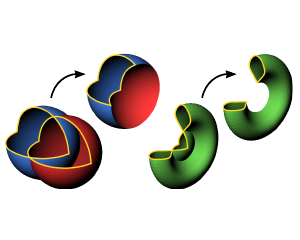
We present a new technique to implement operators that modify the topology of polygonal meshes at intersectionsand self-intersections. Depending on the modification strategy, this effectively results in operators for Boolean combinations or for the construction of outer hulls that are suited for mesh repair tasks and accurate meshbased front tracking of deformable materials that split and merge. By combining an adaptive octree with nested binary space partitions (BSP), we can guarantee exactness (= correctness) and robustness (= completeness) of the algorithm while still achieving higher performance and less memory consumption than previous approaches. The efficiency and scalability in terms of runtime and memory is obtained by an operation localization scheme. We restrict the essential computations to those cells in the adaptive octree where intersections actually occur. Within those critical cells, we convert the input geometry into a plane-based BSP-representation which allows us to perform all computations exactly even with fixed precision arithmetics. We carefully analyze the precision requirements of the involved geometric data and predicates in order to guarantee correctness and show how minimal input mesh quantization can be used to safely rely on computations with standard floating point numbers. We properly evaluate our method with respect to precision, robustness, and efficiency.
A WebService employing this method is available.
Efficient Rasterization for Outdoor Radio Wave Propagation
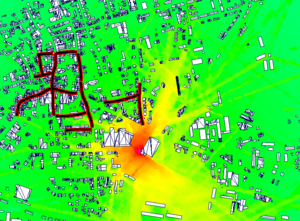
Conventional beam tracing can be used for solving global illumination problems. It is an efficient algorithm, and performs very well when implemented on the GPU. This allows us to apply the algorithm in a novel way to the problem of radio wave propagation. The simulation of radio waves is conceptually analogous to the problem of light transport. We use a custom, parallel rasterization pipeline for creation and evaluation of the beams. We implement a subset of a standard 3D rasterization pipeline entirely on the GPU, supporting 2D and 3D framebuffers for output. Our algorithm can provide a detailed description of complex radio channel characteristics like propagation losses and the spread of arriving signals over time (delay spread). Those are essential for the planning of communication systems required by mobile network operators. For validation, we compare our simulation results with measurements from a real world network. Furthermore, we account for characteristics of different propagation environments and estimate the influence of unknown components like traffic or vegetation by adapting model parameters to measurements.
Image Synthesis for Branching Structures

We present a set of techniques for the synthesis of artificial images that depict branching structures like rivers, cracks, lightning, mountain ranges, or blood vessels. The central idea is to build a statistical model that captures the characteristic bending and branching structure from example images. Then a new skeleton structure is synthesized and the final output image is composed from image fragments of the original input images. The synthesis part of our algorithm runs mostly automatic but it optionally allows the user to control the process in order to achieve a specific result. The combination of the statistical bending and branching model with sophisticated fragment-based image synthesis corresponds to a multi-resolution decomposition of the underlying branching structure into the low frequency behavior (captured by the statistical model) and the high frequency detail (captured by the image detail in the fragments). This approach allows for the synthesis of realistic branching structures, while at the same time preserving important textural details from the original image.
Automatic Registration of Oblique Aerial Images with Cadastral Maps
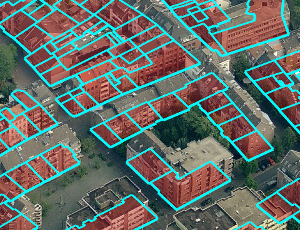
In recent years, oblique aerial images of urban regions have become increasingly popular for 3D city modeling, texturing, and various cadastral applications. In contrast to images taken vertically to the ground, they provide information on building heights, appearance of facades, and terrain elevation. Despite their widespread availability for many cities, the processing pipeline for oblique images is not fully automatic yet. Especially the process of precisely registering oblique images with map vector data can be a tedious manual process. We address this problem with a registration approach for oblique aerial images that is fully automatic and robust against discrepancies between map and image data. As input, it merely requires a cadastral map and an arbitrary number of oblique images. Besides rough initial registrations usually available from GPS/INS measurements, no further information is required, in particular no information about the terrain elevation.
Generalized Use of Non-Terminal Symbols for Procedural Modeling
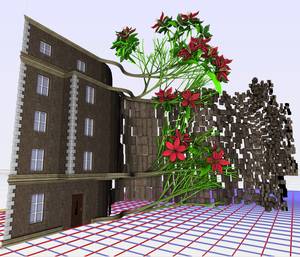
We present the new procedural modeling language G² (Generalized Grammar) which adapts various concepts from general purpose programming languages in order to provide high descriptive power with well-defined semantics and a simple syntax which is easily readable even by non-programmers. We extend the scope of previous architectural modeling languages by allowing for multiple types of non-terminal objects with domain-specific operators and attributes. The language accepts non-terminal symbols as parameters in modeling rules and thus enables the definition of abstract structure templates for flexible re-use within the grammar. To identify specific scene parts or objects, we introduce flags which are Boolean values whose scope covers an entire subtree in the scenegraph. The rigorous handling of typed parameters which are locally declared within the rules prevents inconsistent states emerging from not or wrongly declared variables. By deriving G² from the well-established programming language Python, we can make sure that our modeling language has a well-defined semantics. For illustration, we apply G² to architectural as well as plant modeling in order to demonstrate its descriptive power with some complex examples.
We also provide a Python prototype related to this paper for an easy integration of our system into the Houdini modeling framework from SideFX software. It is available on the project page.
Hybrid Booleans
Talk at Eurographics 2011
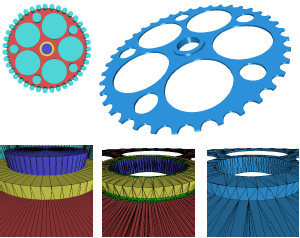
In this paper we present a novel method to compute Boolean operation polygonal meshes. Given a Boolean expression over an arbitrary number input meshes we reliably and efficiently compute an output mesh which faithfully preserves the existing sharp features and precisely reconstructs the new features appearing along the intersections of the input meshes. The term "hybrid" applies to our method in two ways: First, our algorithm operates on a hybrid data structure which stores the original input polygons (surface data) in an adaptively refined octree (volume data). By this we combine the robustness of volumetric techniques with the accuracy of surface-oriented techniques. Second, we generate a new triangulation only in a close vicinity around the intersections of the input meshes and thus preserve as much of the original mesh structure as possible (hybrid mesh). Since the actual processing of the Boolean operation is confined to a very small region around the intersections of the input meshes, we can achieve very high adaptive refinement resolutions and hence very high precision. We demonstrate our method on a number of challenging examples.
3D Sketch Recognition for Interaction in Virtual Environments

We present a comprehensive 3D sketch recognition framework for interaction within Virtual Environments that allows to trigger commands by drawing symbols, which are recognized by a multi-level analysis. It proceeds in three steps: The segmentation partitions each input line into meaningful segments, which are then recognized as a primitive shape, and finally analyzed as a whole sketch by a symbol matching step. The whole framework is configurable over well-defined interfaces, utilizing a fuzzy logic algorithm for primitive shape learning and a textual description language to define compound symbols. It allows an individualized interaction approach that can be used without much training and provides a good balance between abstraction and intuition. We show the real-time applicability of our approach by performance measurements.
@inproceedings {PE:vriphys:vriphys10:115-124,
booktitle = {Workshop in Virtual Reality Interactions and Physical Simulation "VRIPHYS" (2010)},
editor = {Kenny Erleben and Jan Bender and Matthias Teschner},
title = {{3D} Sketch Recognition for Interaction in Virtual Environments},
author = {Rausch, Dominik and Assenmacher, Ingo and Kuhlen, Torsten},
year = {2010},
publisher = {The Eurographics Association},
DOI = {10.2312/PE/vriphys/vriphys10/115-124}
}
Virtual Reality System at RWTH Aachen University
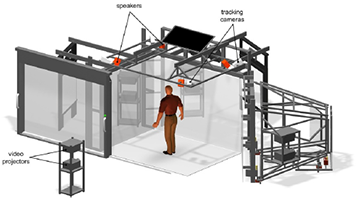
During the last decade, Virtual Reality (VR) systems have progressed from primary laboratory experiments into serious and valuable tools. Thereby, the amount of useful applications has grown in a large scale, covering conventional use, e.g., in science, design, medicine and engineering, as well as more visionary applications such as creating virtual spaces that aim to act real. However, the high capabilities of today’s virtual reality systems are mostly limited to firstclass visual rendering, which directly disqualifies them for immersive applications. For general application, though, VR-systems should feature more than one modality in order to boost its range of applications. The CAVE-like immersive environment that is run at RWTH Aachen University comprises state-of-the-art visualization and auralization with almost no constraints on user interaction. In this article a summary of the concept, the features and the performance of our VR-system is given. The system features a 3D sketching interface that allows controlling the application in a very natural way by simple gestures. The sound rendering engine relies on present-day knowledge of Virtual Acoustics and enables a physically accurate simulation of sound propagation in complex environments, including important wave effects such as sound scattering, airborne sound insulation between rooms and sound diffraction. In spite of this realistic sound field rendering, not only spatially distributed and freely movable sound sources and receivers are supported, but also modifications and manipulations of the environment itself. The auralization concept is founded on pure FIR filtering which is realized by highly parallelized non-uniformly partitioned convolutions. A dynamic crosstalk cancellation system performs the sound reproduction that delivers binaural signals to the user without the need of headphones. The significant computational complexity is handled by distributed computation on PCclusters that drive the simulation in real-time even for huge audio-visual scenarios.
@inproceedings{schroder2010virtual,
title={Virtual reality system at RWTH Aachen University},
author={Schr{\"o}der, Dirk and Wefers, Frank and Pelzer, S{\"o}nke and Rausch, Dominik and Vorl{\"a}nder, Michael and Kuhlen, Torsten},
booktitle={Proceedings of the international symposium on room acoustics (ISRA), Melbourne, Australia},
year={2010}
}
Ein Framework für Geometrieverarbeitung basierend auf hybriden Oberflächendarstellungen
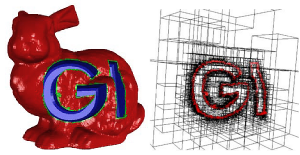
We present a framework that allows for the composition of custom-tailored data structures for hybrid representation of geometry and supports the development of associated geometry processing methods. Besides others, a novel hybrid approach for the evaluation of Boolean expressions on polygon meshes is elaborated in this context. By relying on the hybrid geometry information it is – in contrast to previous methods – able to perform such operations robustly as well as accurately.
Character Reconstruction and Animation from Uncalibrated Video
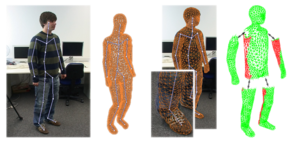
We present a novel method to reconstruct 3D character models from video. The main conceptual contribution is that the reconstruction can be performed from a single uncalibrated video sequence which shows the character in articulated motion. We reduce this generalized problem setting to the easier case of multi-view reconstruction of a rigid scene by applying pose synchronization of the character between frames. This is enabled by two central technical contributions. First, based on a generic character shape template, a new mesh-based technique for accurate shape tracking is proposed. This method successfully handles the complex occlusions issues, which occur when tracking the motion of an articulated character. Secondly, we show that image-based 3D reconstruction becomes possible by deforming the tracked character shapes as-rigid-as-possible into a common pose using motion capture data. After pose synchronization, several partial reconstructions can be merged in order to create a single, consistent 3D character model. We integrated these components into a simple interactive framework, which allows for straightforward generation and animation of 3D models for a variety of character shapes from uncalibrated monocular video.
Motion Estimating Device

A motion estimating device first detects mobile objects Oi and Oi' in continuous image frames T and T', and acquires image areas Ri and Ri' corresponding to the mobile objects Oi and Oi'. Then, the motion estimating device removes the image areas Ri and Ri' corresponding to the mobile objects Oi and Oi' in the image frames T and T', extracts corresponding point pairs Pj of feature points between the image frames T and T' from the image areas having removed the image areas Ri and Ri', and carries out the motion estimation of the autonomous mobile machine between the image frames T and T' on the basis of the positional relationship of the corresponding point pairs Pj of feature points.
@misc{ess2012motion,
title={Motion estimating device},
author={Ess, A. and Leibe, B. and Schindler, K. and Van Gool, L. and Kitahama, K. and Funayama, R.},
url={http://www.google.com/patents/US8213684},
year={2012},
publisher={Google Patents},
note={US Patent 8,213,684}
}
Object Detection and Tracking for Autonomous Navigation in Dynamic Environments
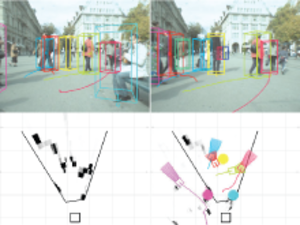
We address the problem of vision-based navigation in busy inner-city locations, using a stereo rig mounted on a mobile platform. In this scenario semantic information becomes important: rather than mod- elling moving objects as arbitrary obstacles, they should be categorised and tracked in order to predict their future behaviour. To this end, we combine classical geometric world mapping with object category detection and tracking. Object-category specific detectors serve to find instances of the most important object classes (in our case pedestrians and cars). Based on these detections, multi-object tracking recovers the objects’ trajectories, thereby making it possible to predict their future locations, and to employ dynamic path planning. The approach is evaluated on challenging, realistic video sequences recorded at busy inner-city locations.
@article{ess2010object,
title={Object detection and tracking for autonomous navigation in dynamic environments},
author={Ess, Andreas and Schindler, Konrad and Leibe, Bastian and Van Gool, Luc},
journal={The International Journal of Robotics Research},
volume={29},
number={14},
pages={1707--1725},
year={2010},
}
Multi-Person Tracking with Sparse Detection and Continuous Segmentation
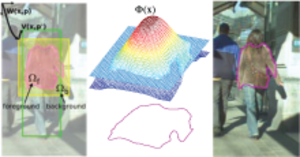
This paper presents an integrated framework for mobile street-level tracking of multiple persons. In contrast to classic tracking-by-detection approa- ches, our framework employs an efficient level-set tracker in order to follow indi- vidual pedestrians over time. This low-level tracker is initialized and periodically updated by a pedestrian detector and is kept robust through a series of consis- tency checks. In order to cope with drift and to bridge occlusions, the resulting tracklet outputs are fed to a high-level multi-hypothesis tracker, which performs longer-term data association. This design has the advantage of simplifying short- term data association, resulting in higher-quality tracks that can be maintained even in situations where the pedestrian detector does no longer yield good de- tections. In addition, it requires the pedestrian detector to be active only part of the time, resulting in computational savings. We quantitatively evaluate our ap- proach on several challenging sequences and show that it achieves state-of-the-art performance.
@incollection{mitzel2010multi,
title={Multi-person tracking with sparse detection and continuous segmentation},
author={Mitzel, Dennis and Horbert, Esther and Ess, Andreas and Leibe, Bastian},
booktitle={ECCV},
pages={397--410},
year={2010},
}
Geometrically Constrained Level-Set Tracking for Automotive Applications
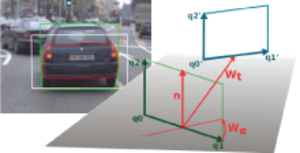
We propose a new approach for integrating geometric scene knowledge into a level-set tracking framework. Our approach is based on a novel constrained-homography transformation model that restricts the deformation space to physically plausible rigid motion on the ground plane. This model is especially suitable for tracking vehicles in automo- tive scenarios. Apart from reducing the number of parameters in the estimation, the 3D transformation model allows us to obtain additional information about the tracked objects and to recover their detailed 3D motion and orientation at every time step. We demonstrate how this in- formation can be used to improve a Kalman filter estimate of the tracked vehicle dynamics in a higher-level tracker, leading to more accurate ob- ject trajectories. We show the feasibility of this approach for an applica- tion of tracking cars in an inner-city scenario.
@incollection{horbert2010geometrically,
title={Geometrically constrained level set tracking for automotive applications},
author={Horbert, Esther and Mitzel, Dennis and Leibe, Bastian},
booktitle={Pattern Recognition},
pages={472--482},
year={2010},
}
An Evaluation of Two Automatic Landmark Building Discovery Algorithms for City Reconstruction
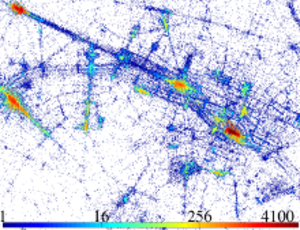
An important part of large-scale city reconstruction systems is an im- age clustering algorithm that divides a set of images into groups that should cover only one building each. Those groups then serve as input for structure from mo- tion systems. A variety of approaches for this mining step have been proposed recently, but there is a lack of comparative evaluations and realistic benchmarks. In this work, we want to fill this gap by comparing two state-of-the-art landmark mining algorithms: spectral clustering and min-hash. Furthermore, we introduce a new large-scale dataset for the evaluation of landmark mining algorithms con- sisting of 500k images from the inner city of Paris. We evaluate both algorithms on the well-known Oxford dataset and our Paris dataset and give a detailed com- parison of the clustering quality and computation time of the algorithms.
@incollection{weyand2010evaluation,
title={An evaluation of two automatic landmark building discovery algorithms for city reconstruction},
author={Weyand, Tobias and Hosang, Jan and Leibe, Bastian},
booktitle={ECCV Workshop},
pages={310--323},
year={2010},
}
Incremental Model Selection for Detection and Tracking of Planar Surfaces

Man-made environments are abundant with planar surfaces which have attractive properties and are a prerequisite for a variety of vision tasks. This paper presents an incremental model selection method to detect piecewise planar surfaces, where planes once detected are tracked and serve as priors in subsequent images. The novelty of this approach is to formalize model selection for plane detection with Minimal Description Length (MDL) in an incremental manner. In each iteration tracked planes and new planes computed from randomly sampled interest points are evaluated, the hypotheses which best explain the scene are retained, and their supporting points are marked so that in the next iteration random sampling is guided to unexplained points. Hence, the remaining finer scene details can be represented. We show in a quantitative evaluation that this new method competes with state of the art algorithms while it is more flexible to incorporate prior knowledge from tracking.
@inproceedings{prankl10incremental,
title = {Incremental Model Selection for Detection and Tracking of Planar Surfaces},
author = {Prankl, Johann and Zillich, Michael and Leibe, Bastian and Vincze, Markus},
year = {2010},
booktitle = {BMVC},
}
Automatic Detection and Tracking of Pedestrians from a Moving Stereo Rig
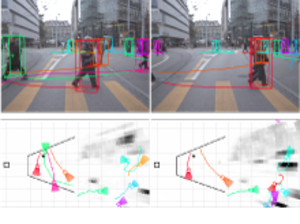
We report on a stereo system for 3D detection and tracking of pedestrians in urban traffic scenes. The system is built around a probabilistic environment model which fuses evidence from dense 3D reconstruction and image-based pedestrian detection into a consistent interpretation of the observed scene, and a multi-hypothesis tracker to reconstruct the pedestrians’ trajectories in 3D coordinates over time. Experiments on real stereo sequences recorded in busy inner-city scenarios are presented, in which the system achieves promising results.
@article{schindler2010automatic,
title={Automatic detection and tracking of pedestrians from a moving stereo rig},
author={Schindler, Konrad and Ess, Andreas and Leibe, Bastian and Van Gool, Luc},
journal={ISPRS Journal of Photogrammetry and Remote Sensing},
volume={65},
number={6},
pages={523--537},
year={2010},
}
Virtual Texturing
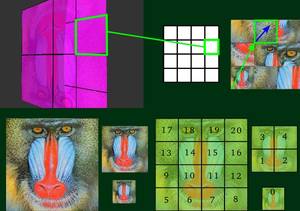
In this thesis a rendering system and an accompanying tool chain for Virtual Texturing is presented. Our tools allow to automatically retexture existing geometry in order to apply unique texturing on each face. Furthermore we investigate several techniques that try to minimize visual artifacts in the case that only a small amount of pages can be streamed per frame.We analyze the influence of different heuristics that are responsible for the page selection. Alongside these results we present a measurement method to allow the comparison of our heuristics.
Mixed-Integer Quadrangulation
Proceedings of the 2009 SIGGRAPH Conference
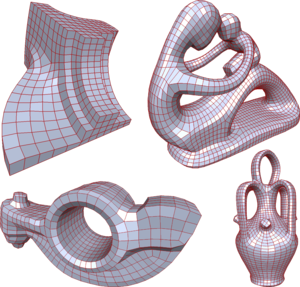
We present a novel method for quadrangulating a given triangle mesh. After constructing an as smooth as possible symmetric cross field satisfying a sparse set of directional constraints (to capture the geometric structure of the surface), the mesh is cut open in order to enable a low distortion unfolding. Then a seamless globally smooth parametrization is computed whose iso-parameter lines follow the cross field directions. In contrast to previous methods, sparsely distributed directional constraints are sufficient to automatically determine the appropriate number, type and position of singularities in the quadrangulation. Both steps of the algorithm (cross field and parametrization) can be formulated as a mixed-integer problem which we solve very efficiently by an adaptive greedy solver. We show several complex examples where high quality quad meshes are generated in a fully automatic manner.
The Constrained Mixed-Integer Solver used in this project has been released under GPL and can be found on its projects page.
SCRAMSAC: Improving RANSAC's Efficiency with a Spatial Consistency Filter
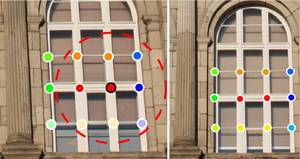
Geometric verification with RANSAC has become a crucial step for many local feature based matching applications. Therefore, the details of its implementation are directly relevant for an application's run-time and the quality of the estimated results. In this paper, we propose a RANSAC extension that is several orders of magnitude faster than standard RANSAC and as fast as and more robust to degenerate configurations than PROSAC, the currently fastest RANSAC extension from the literature. In addition, our proposed method is simple to implement and does not require parameter tuning. Its main component is a spatial consistency check that results in a reduced correspondence set with a significantly increased inlier ratio, leading to faster convergence of the remaining estimation steps. In addition, we experimentally demonstrate that RANSAC can operate entirely on the reduced set not only for sampling, but also for its consensus step, leading to additional speed-ups. The resulting approach is widely applicable and can be readily combined with other extensions from the literature. We quantitatively evaluate our approach's robustness on a variety of challenging datasets and compare its performance to the state-of-the-art.
Simulation of Radio Wave Propagation by Beam Tracing
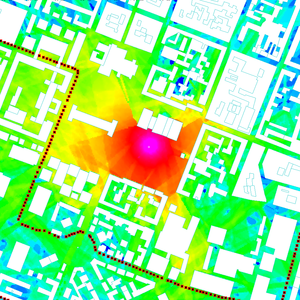
Beam tracing can be used for solving global illumination problems. It is an efficient algorithm, and performs very well when implemented on the GPU. This allows us to apply the algorithm in a novel way to the problem of radio wave propagation. The simulation of radio waves is conceptually analogous to the problem of light transport. However, their wavelengths are of proportions similar to that of the environment. At such frequencies, waves that bend around corners due to diffraction are becoming an important propagation effect. In this paper we present a method which integrates diffraction, on top of the usual effects related to global illumination like reflection, into our beam tracing algorithm. We use a custom, parallel rasterization pipeline for creation and evaluation of the beams. Our algorithm can provide a detailed description of complex radio channel characteristics like propagation losses and the spread of arriving signals over time (delay spread). Those are essential for the planning of communication systems required by mobile network operators. For validation, we compare our simulation results with measurements from a real world network.
Robust Tracking-by-Detection Using a Detector Confidence Particle Filter
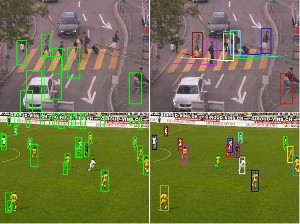
We propose a novel approach for multi-person tracking-by-detection in a particle filtering framework. In addition to final high-confidence detections, our algorithm uses the continuous confidence of pedestrian detectors and online trained, instance-specific classifiers as a graded observation model. Thus, generic object category knowledge is complemented by instance-specific information. A main contribution of this paper is the exploration of how these unreliable information sources can be used for multi-person tracking. The resulting algorithm robustly tracks a large number of dynamically moving persons in complex scenes with occlusions, does not rely on background modeling, and operates entirely in 2D (requiring no camera or ground plane calibration). Our Markovian approach relies only on information from the past and is suitable for online applications. We evaluate the performance on a variety of datasets and show that it improves upon state-of-the-art methods.
Feature-Centric Efficient Subwindow Search
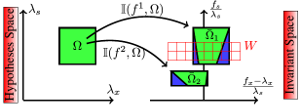
Many object detection systems rely on linear classifiers embedded in a sliding-window scheme. Such exhaustive search involves massive computation. Efficient Subwindow Search (ESS) [11] avoids this by means of branch and bound. However, ESS makes an unfavourable memory tradeoff. Memory usage scales with both image size and overall object model size. This risks becoming prohibitive in a multiclass system. In this paper, we make the connection between sliding-window and Hough-based object detection explicit. Then, we show that the feature-centric view of the latter also nicely fits with the branch and bound paradigm, while it avoids the ESS memory tradeoff. Moreover, on-line integral image calculations are not needed. Both theoretical and quantitative comparisons with the ESS bound are provided, showing that none of this comes at the expense of performance.
Markerless Reconstruction of Dynamic Facial Expressions
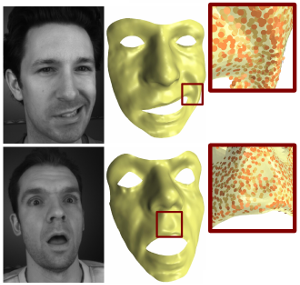
In this paper we combine methods from the field of computer vision with surface editing techniques to generate animated faces, which are all in full correspondence to each other. The input for our system are synchronized video streams from multiple cameras. The system produces a sequence of triangle meshes with fixed connectivity, representing the dynamics of the captured face. By carfully taking all requirements and characteristics into account we decided for the proposed system design: We deform an initial face template using movements estimated from the video streams. To increase the robustness of the initial reconstruction, we use a morphable model as a shape prior. However using an efficient Surfel Fitting technique, we are still able to precisely capture face shapes not part of the PCA Model. In the deformation stage, we use a 2D mesh-based tracking approach to establish correspondences in time. We then reconstruct image-samples in 3D using the same Surfel Fitting technique, and finally use the reconstructed points to robustly deform the initially reconstructed face.
Volume Conserving Simulation of Deformable Bodies
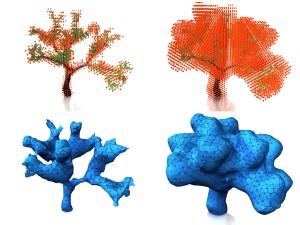
We present a new method for simulating volume conserving deformable bodies using an impulse-based approach. In order to simulate a deformable body a tetrahedral model is generated from an arbitrary triangle mesh. All resulting tetrahedrons are assigned to volume constraints which ensure the conservation of the total volume. For the simulation of such a constraint impulses are computed and applied to the particles of the assigned tetrahedrons. The algorithm is easy to implement and ensures exact volume conservation in each simulation step.
@inproceedings{Diziol09,
author = {Raphael Diziol and Jan Bender and Daniel Bayer},
title = {Volume Conserving Simulation of Deformable Bodies},
booktitle = {Short Paper Proceedings of Eurographics},
year = {2009},
month = mar,
address = {Munich (Germany)}
}
Using Multi-View Recognition and Meta-data Annotation to Guide a Robot's Attention

In the transition from industrial to service robotics, robots will have to deal with increasingly unpredictable and variable environments. We present a system that is able to recognize objects of a certain class in an image and to identify their parts for potential interactions. The method can recognize objects from arbitrary viewpoints and generalizes to instances that have never been observed during training, even if they are partially occluded and appear against cluttered backgrounds. Our approach builds on the Implicit Shape Model of Leibe et al. (2008). We extend it to couple recognition to the provision of meta-data useful for a task and to the case of multiple viewpoints by integrating it with the dense multi-view correspondence finder of Ferrari et al. (2006). Meta-data can be part labels but also depth estimates, information on material types, or any other pixelwise annotation. We present experimental results on wheelchairs, cars, and motorbikes.
Robust Multi-Person Tracking from a Mobile Platform
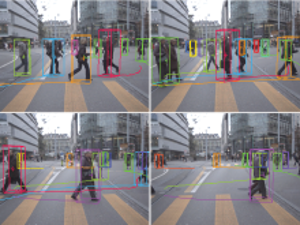
In this paper, we address the problem of multi-person tracking in busy pedestrian zones using a stereo rig mounted on a mobile platform. The complexity of the problem calls for an integrated solution that extracts as much visual information as possible and combines it through cognitive feedback cycles. We propose such an approach, which jointly estimates camera position, stereo depth, object detection, and tracking. The interplay between those components is represented by a graphical model. Since the model has to incorporate object-object interactions and temporal links to past frames, direct inference is intractable. We therefore propose a two-stage procedure: for each frame we first solve a simplified version of the model (disregarding interactions and temporal continuity) to estimate the scene geometry and an overcomplete set of object detections. Conditioned on these results, we then address object interactions, tracking, and prediction in a second step. The approach is experimentally evaluated on several long and difficult video sequences from busy inner-city locations. Our results show that the proposed integration makes it possible to deliver robust tracking performance in scenes of realistic complexity.
An Intuitive Interface for Interactive High Quality Image-Based Modeling
(Proc. of Pacific Graphics 2009)
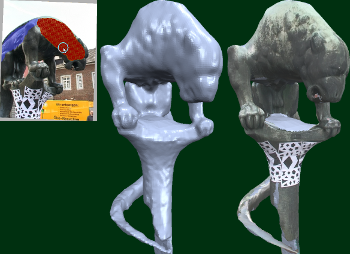
We present the design of an interactive image-based modeling tool that enables a user to quickly generate detailed 3D models with texture from a set of calibrated input images. Our main contribution is an intuitive user interface that is entirely based on simple 2D painting operations and does not require any technical expertise by the user or difficult pre-processing of the input images. One central component of our tool is a GPU-based multi-view stereo reconstruction scheme, which is implemented by an incremental algorithm, that runs in the background during user interaction so that the user does not notice any significant response delay.
GIzMOs: Genuine Image Mosaics with Adaptive Tiling

We present a method which splits an input image into a set of tiles. Each tile is then replaced by another image from a large database such that, when viewed from a distance, the original image is reproduced as well as possible. While the general concept of image mosaics is not new, we consider our results as "genuine image mosaics" (or short GIzMOs) in the sense that the images from the database are not modified in any way. This is different from previous work, where the image tiles are usually color shifted or overlaid with the high-frequency content of the input image. Besides the regular alignment of the tiles we propose a greedy approach for adaptive tiling where larger tiles are placed in homogenous image regions. By this we avoid the visual periodicity, which is induced by the equal spacing of the image tiles in the completely regular setting. Our overall system addresses also the cleaning of the image database by removing all unwanted images with no meaningful content. We apply differently sophisticated image descriptors to find the best matching image for each tile. For esthetic and artistic reasons we classify each tile as "feature" or "non-feature" and then apply a suitable image descriptor. In a user study we have verified that our descriptors lead to mosaics that are significantly better recognizable than just taking, e.g., average color values.
A WebService employing this method is available.
Simulating Almost Incompressible Deformable Objects

We present a new method for simulating almost incompressible deformable objects. A tetrahedral model is used to represent and restore the volume during the simulation. The new constraint computes impulses in the onering of each vertex of the tetrahedral model, in order to conserve the initial volume. With different parameters, the presented method can handle a large variety of different deformation behaviors, ranging from stiff to large deformations and even plastic deformations. The algorithm is easy to implement and reduces the volume error to less than 1% in most situations, even when large deformations are applied.
@inproceedings{Diziol09,
author = {Raphael Diziol and Daniel Bayer and Jan Bender},
title = {Simulating Almost Incompressible Deformable Objects},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2009},
month = nov,
address = {Karlsruhe (Germany)},
pages = {31-37}
}
Optimized impulse-based dynamic simulation

The impulse-based dynamic simulation is a recent method to compute physically based simulations. It supports the simulation of rigid-bodies and particles connected by all kinds of implicit constraints. In recent years the impulse-based dynamic simulation has been more and more used to simulate deformable bodies as well. These simulations create new requirements for the runtime of the method because very large systems of connected particles have to be simulated to get results of high quality. In this paper several runtime optimizations for the impulse-based dynamic simulation are presented. They allow to compute the same simulations at a fraction of time needed for the original method. Therefore, larger systems or simulations with increased accuracy can be simulated in realtime.
@inproceedings{Bayer09,
author = {Daniel Bayer and Raphael Diziol and Jan Bender},
title = {Optimized Impulse-Based Dynamic Simulation},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2009},
month = nov,
address = {Karlsruhe (Germany)},
pages = {125-133}
}
Dynamic simulation of inextensible cloth
In this paper an impulse-based method for cloth simulation is presented. The simulation of cloth is required in different application areas like computer animation, virtual reality or computer games. Simulation methods often assume that cloth is an elastic material. With this assumption the simulation can be performed very efficiently using spring forces. The problem is that many textiles cannot be stretched significantly. A realistic simulation of these textiles with spring forces leads to stiff differential equations which cause a deterioration of performance. The impulse-based method described in this paper solves this problem and allows the realistic simulation of inelastic textiles.
@article{Bender2009,
author = {Jan Bender and Daniel Bayer and Raphael Diziol},
title = {Dynamic simulation of inextensible cloth},
journal = {IADIS International Journal on Computer Science and Information Systems},
volume = {4},
number = {2},
year = {2009},
pages = {86--102}
}
PRISM: PRincipled Implicit Shape Model
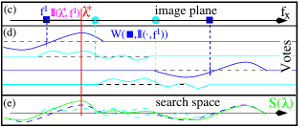
This paper addresses the problem of object detection by means of the Generalised Hough transform paradigm. The Implicit Shape Model (ISM) is a well-known approach based on this idea. It made this paradigm popular and has been adopted many times. Although the algorithm exhibits robust detection performance, its description, i.e. its probabilistic model, involves arguments which are unsatisfactory from a probabilistic standpoint. We propose a framework which overcomes these problems and gives a sound justification to the voting procedure. Furthermore, our framework allows for a formal understanding of the heuristic of soft-matching commonly used in visual vocabulary systems. We show that it is sufficient to use soft-matching during learning only and to perform fast nearest neighbour matching at recognition time (where speed is of prime importance). Our implementation is based on Gaussian Mixture Models (instead of kernel density estimators as with ISM) which lead to a fast gradient-based object detector.
Shape-from-Recognition: Recognition Enables Meta-Data Transfer

Low-level cues in an image not only allow to infer higher-level information like the presence of an object, but the inverse is also true. Category-level object recognition has now reached a level of maturity and accuracy that allows to successfully feed back its output to other processes. This is what we refer to as cognitive feedback. In this paper, we study one particular form of cognitive feedback, where the ability to recognize objects of a given category is exploited to infer different kinds of meta-data annotations for images of previously unseen object instances, in particular information on 3D shape. Meta-data can be discrete, real- or vector-valued. Our approach builds on the Implicit Shape Model of Leibe and Schiele [1], and extends it to transfer annotations from training images to test images. We focus on the inference of approximative 3D shape information about objects in a single 2D image. In experiments, we illustrate how our method can infer depth maps, surface normals and part labels for previously unseen object instances.
Moving Obstacle Detection in Highly Dynamic Scenes
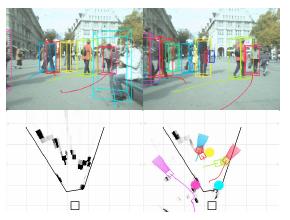
We address the problem of vision-based multi-person tracking in busy pedestrian zones using a stereo rig mounted on a mobile platform. Specifically, we are interested in the application of such a system for supporting path planning algorithms in the avoidance of dynamic obstacles. The complexity of the problem calls for an integrated solution, which extracts as much visual information as possible and combines it through cognitive feedback. We propose such an approach, which jointly estimates camera position, stereo depth, object detections, and trajectories based only on visual information. The interplay between these components is represented in a graphical model. For each frame, we first estimate the ground surface together with a set of object detections. Based on these results, we then address object interactions and estimate trajectories. Finally, we employ the tracking results to predict future motion for dynamic objects and fuse this information with a static occupancy map estimated from dense stereo. The approach is experimentally evaluated on several long and challenging video sequences from busy inner-city locations recorded with different mobile setups. The results show that the proposed integration makes stable tracking and motion prediction possible, and thereby enables path planning in complex and highly dynamic scenes.
A Sketching Interface for Feature Curve Recovery of Free-Form Surfaces
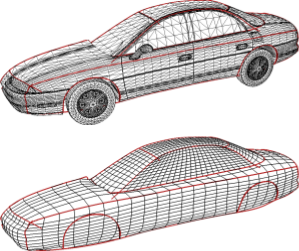
In this paper, we present a semi-automatic approach to efficiently and robustly recover the characteristic feature curves of a given free-form surface. The technique supports a sketch-based interface where the user just has to roughly sketch the location of a feature by drawing a stroke directly on the input mesh. The system then snaps this initial curve to the correct position based on a graph-cut optimization scheme that takes various surface properties into account. Additional position constraints can be placed and modified manually which allows for an interactive feature curve editing functionality. We demonstrate the usefulness of our technique by applying it to a practical problem scenario in reverse engineering. Here, we consider the problem of generating a statistical (PCA) shape model for car bodies. The crucial step is to establish proper feature correspondences between a large number of input models. Due to the significant shape variation, fully automatic techniques are doomed to failure. With our simple and effective feature curve recovery tool, we can quickly sketch a set of characteristic features on each input model which establishes the correspondence to a pre-defined template mesh and thus allows us to generate the shape model. Finally, we can use the feature curves and the shape model to implement an intuitive modeling metaphor to explore the shape space spanned by the input models.
Impulse-based dynamic simulation on the GPU

In this paper a new, efficient method for dynamic simulation on the GPU is presented. The method is based on an impulse-based approach which is an ideal candidate to simulate on limited hardware due to its simplicity. The proposed method shows how the impulse-based dynamic simulation can benefit from the highly parallel structure of the GPU without suffering too much losses by its limitations. This is achieved by the use of a new way to solve constraints. Most parts of the actual computation can be done in parallel, using only a few number of operations. This allows the implementation to run on a wide range of graphics boards.
@inproceedings{Bayer09,
author = {Daniel Bayer and Jan Bender and Raphael Diziol},
title = {Impulse-based dynamic simulation on the GPU},
booktitle = {Computer Graphics and Visualization (CGV 2009) - IADIS Multi Conference on Computer Science and Information Systems},
year = {2009},
month = jun,
address = {Algarve (Portugal)}
}
In-hand Scanning with Online Loop Closure

We present a complete 3D in-hand scanning system that allows users to scan objects by simply turning them freely in front of a real-time 3D range scanner. The 3D object model is reconstructed online as a point cloud by registering and integrating the incoming 3D patches with the online 3D model. The accumulation of registration errors leads to the well-known loop closure problem. We address this issue already during the scanning session by distorting the object as rigidly as possible. Scanning errors are removed by explicitly handling outliers. As a result of our proposed online modeling and error handling procedure, the online model is of sufficiently high quality to serve as the final model. Thus, no additional post-processing is required which might lead to artifacts in the model reconstruction. We demonstrate our approach on several difficult real-world objects and quantitatively evaluate the resulting modeling accuracy.
Markovian Tracking-by-Detection from a Single, Uncalibrated Camera

We present an algorithm for multi-person tracking-by-detection in a particle filtering framework. To address the unreliability of current state-of-the-art object detectors, our algorithm tightly couples object detection, classification, and tracking components. Instead of relying only on the final, sparse output from a detector, we additionally employ its continuous intermediate output to impart our approach with more flexibility to handle difficult situations. The resulting algorithm robustly tracks a variable number of dynamically moving persons in complex scenes with occlusions. The approach does not rely on background modeling and is based only on 2D information from a single camera, not requiring any camera or ground plane calibration. We evaluate the algorithm on the PETS’09 tracking dataset and discuss the importance of the different algorithm components to robustly handle difficult situations.
Improved Multi-Person Tracking with Active Occlusion Handling
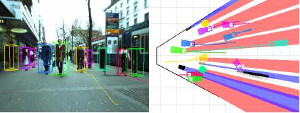
We address the problem of vision-based multi-person tracking in busy inner-city locations using a stereo rig mounted on a mobile platform. Specifically, we are interested in the application of such a system for autonomous navigation and path planning. In such a scenario, semantic information about the moving scene objects becomes important. In order to estimate this robustly, we combine classical geometric world mapping with multi-person detection and tracking. In this paper, we refine an approach presented in earlier work, which jointly estimates camera position, stereo depth, object detections, and trajectories based only on visual information. We analyze the influence of the trajectory generator, which forms part of any tracking-by-detection system, and propose a set of measures to improve its performance. The extensions are experimentally evaluated on challenging, realistic video sequences recorded at busy inner-city locations. The results show that the proposed extensions significantly improve overall system performance, making the resulting detecting and tracking capabilities an interesting component of future navigation system for highly dynamic scenes.
A Framework for Geometry Processing based on Hybrid Surface Representations
We present a framework that allows for the composition of custom-tailored data structures for hybrid representation of geometry and supports the development of associated geometry processing methods. Besides others, a novel hybrid approach for the evaluation of Boolean expressions on polygon meshes is elaborated in this context.
Spectral Quadrangulation with Orientation and Alignment Control
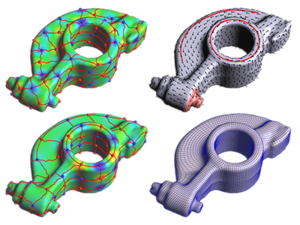
This paper presents a new quadrangulation algorithm, extending the spectral surface quadrangulation approach where the coarse quadrangular structure is derived from the Morse-Smale complex of an eigenfunction of the Laplacian operator on the input mesh. In contrast to the original scheme, we provide flexible explicit controls of the shape, size, orientation and feature alignment of the quadrangular faces. We achieve this by proper selection of the optimal eigenvalue (shape), by adaption of the area term in the Laplacian operator (size), and by adding special constraints to the Laplace eigenproblem (orientation and alignment). By solving a generalized eigenproblem we can generate a scalar field on the mesh whose Morse-Smale complex is of high quality and satisfies all the user requirements. The final quadrilateral mesh is generated from the Morse- Smale complex by computing a globally smooth parametrization. Here we additionally introduce edge constraints to preserve user specified feature lines accurately.
Geometric Modeling Based on Polygonal Meshes

In the last years triangle meshes have become increasingly popular and are nowadays intensively used in many different areas of computer graphics and geometry processing. In classical CAGD irregular triangle meshes developed into a valuable alternative to traditional spline surfaces, since their conceptual simplicity allows for more flexible and highly efficient processing. Moreover, the consequent use of triangle meshes as surface representation avoids error-prone conversions, e.g., from CAD surfaces to mesh-based input data of numerical simulations. Besides classical geometric modeling, other major areas frequently employing triangle meshes are computer games and movie production. In this context geometric models are often acquired by 3D scanning techniques and have to undergo post-processing and shape optimization techniques before being actually used in production.
High-Resolution Volumetric Computation of Offset Surfaces with Feature Preservation
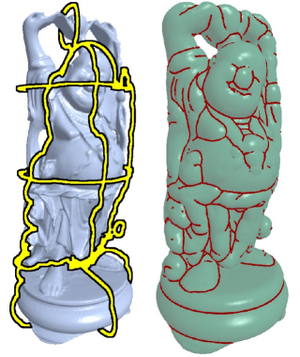
We present a new algorithm for the efficient and reliable generation of offset surfaces for polygonal meshes. The algorithm is robust with respect to degenerate configurations and computes (self-)intersection free offsets that do not miss small and thin components. The results are correct within a prescribed e-tolerance. This is achieved by using a volumetric approach where the offset surface is defined as the union of a set of spheres, cylinders, and prisms instead of surface-based approaches that generally construct an offset surface by shifting the input mesh in normal direction. Since we are using the unsigned distance field, we can handle any type of topological inconsistencies including non-manifold configurations and degenerate triangles. A simple but effective mesh operation allows us to detect and include sharp features (shocks) into the output mesh and to preserve them during post-processing (decimation and smoothing). We discretize the distance function by an efficient multi-level scheme on an adaptive octree data structure. The problem of limited voxel resolutions inherent to every volumetric approach is avoided by breaking the bounding volume into smaller tiles and processing them independently. This allows for almost arbitrarily high voxel resolutions on a commodity PC while keeping the output mesh complexity low. The quality and performance of our algorithm is demonstrated for a number of challenging examples.
Image Selection For Improved Multi-View Stereo
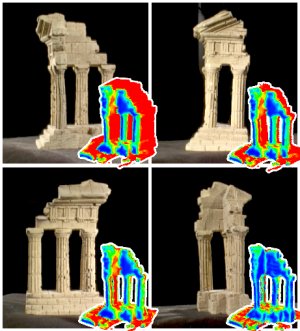
The Middlebury Multi-View Stereo evaluation clearly shows that the quality and speed of most multi-view stereo algorithms depends significantly on the number and selection of input images. In general, not all input images contribute equally to the quality of the output model, since several images may often contain similar and hence overly redundant visual information. This leads to unnecessarily increased processing times. On the other hand, a certain degree of redundancy can help to improve the reconstruction in more ``difficult'' regions of a model. In this paper we propose an image selection scheme for multi-view stereo which results in improved reconstruction quality compared to uniformly distributed views. Our method is tuned towards the typical requirements of current multi-view stereo algorithms, and is based on the idea of incrementally selecting images so that the overall coverage of a simultaneously generated proxy is guaranteed without adding too much redundant information. Critical regions such as cavities are detected by an estimate of the local photo-consistency and are improved by adding additional views. Our method is highly efficient, since most computations can be out-sourced to the GPU. We evaluate our method with four different methods participating in the Middlebury benchmark and show that in each case reconstructions based on our selected images yield an improved output quality while at the same time reducing the processing time considerably.
Beam Tracing for Multipath Propagation in Urban Environments
We present a novel method for efficient computation of complex channel characteristics due to multipath effects in urban microcell environments. Significant speedups are obtained compared to state-of-the-art ray-tracing algorithms by tracing continuous beams and by using parallelization techniques. We optimize simulation parameters using on-site measurements from real world networks. We formulate the adaption of model parameters as a constrained least-squares problem where each row of the matrix corresponds to one measurement location, and where the columns are formed by the beams that reach the respective location.
2D Video Editing for 3D Effects

We present a semi-interactive system for advanced video processing and editing. The basic idea is to partially recover planar regions in object space and to exploit this minimal pseudo-3D information in order to make perspectively correct modifications. Typical operations are to increase the quality of a low-resolution video by overlaying high-resolution photos of the same approximately planar object or to add or remove objects by copying them from other video streams and distorting them perspectively according to some planar reference geometry. The necessary user interaction is entirely in 2D and easy to perform even for untrained users. The key to our video processing functionality is a very robust and mostly automatic algorithm for the perspective registration of video frames and photos, which can be used as a very effective video stabilization tool even in the presence of fast and blurred motion. Explicit 3D reconstruction is thus avoided and replaced by image and video rectification. The technique is based on state-of-the-art feature tracking and homography matching. In complicated and ambiguous scenes, user interaction as simple as 2D brush strokes can be used to support the registration. In the stabilized video, he reference plane appears frozen which simplifies segmentation and matte extraction. We demonstrate our system for a number of quite challenging application scenarios such as video enhancement, background replacement, foreground removal and perspectively correct video cut and paste.
Interactive Global Illumination for Deformable Geometry in CUDA

Interactive global illumination for fully deformable scenes with dynamic relighting is currently a very elusive goal in the area of realistic rendering. In this work we propose a highly efficient and scalable system that is based on explicit visibility calculations. The rendering equation defines the light exchange between surfaces, which we approximate by subsampling. By utilizing the power of modern parallel GPUs using the CUDA framework we achieve interactive frame rates. Since we update the global illumination continuously in an asynchronous fashion, we maintain interactivity at all times for moderately complex scenes. We show that we can achieve higher frame rates for scenes with moving light sources, diffuse indirect illumination and dynamic geometry than other current methods, while maintaining a high image quality.
Updated paper: Small technical fix.
Parallel simulation of inextensible cloth
This paper presents an efficient simulation method for parallel cloth simulation. The presented method uses an impulse-based approach for the simulation. Cloth simulation has many application areas like computer animation, computer games or virtual reality. Simulation methods often make the assumption that cloth is an elastic material. In this way the simulation can be performed very efficiently by using spring forces. These methods disregard the fact that many textiles cannot be stretched significantly. The simulation of inextensible textiles with methods based on spring forces leads to stiff differential equations which cause a loss of performance. In contrast to that, in this paper a method is presented that simulates cloth by using impulses. The mesh of a cloth model is subdivided into strips of constraints. The impulses for each strip can be computed in linear time. The strips that have no common particle are independent from each other and can be solved in parallel. The impulse-based method allows the realistic simulation of inextensible textiles in real-time.
@inproceedings{Bender08,
author = {Jan Bender and Daniel Bayer},
title = {Parallel simulation of inextensible cloth},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2008},
month = nov,
address = {Grenoble (France)},
pages = {47-56}
}
Robust Object Detection with Interleaved Categorization and Segmentation
This paper presents a novel method for detecting and localizing objects of a visual category in cluttered real-world scenes. Our approach considers object categorization and figure-ground segmentation as two interleaved processes that closely collaborate towards a common goal. As shown in our work, the tight coupling between those two processes allows them to benefit from each other and improve the combined performance. The core part of our approach is a highly flexible learned representation for object shape that can combine the information observed on different training examples in a probabilistic extension of the Generalized Hough Transform. The resulting approach can detect categorical objects in novel images and automatically infer a probabilistic segmentation from the recognition result. This segmentation is then in turn used to again improve recognition by allowing the system to focus its efforts on object pixels and to discard misleading influences from the background. Moreover, the information from where in the image a hypothesis draws its support is employed in an MDL based hypothesis verification stage to resolve ambiguities between overlapping hypotheses and factor out the effects of partial occlusion. An extensive evaluation on several large data sets shows that the proposed system is applicable to a range of different object categories, including both rigid and articulated objects. In addition, its flexible representation allows it to achieve competitive object detection performance already from training sets that are between one and two orders of magnitude smaller than those used in comparable systems.
3D Urban Scene Modeling Integrating Recognition and Reconstruction

Supplying realistically textured 3D city models at ground level promises to be useful for pre-visualizing upcoming traffic situations in car navigation systems. Because this previsualization can be rendered from the expected future viewpoints of the driver, the required maneuver will be more easily understandable. 3D city models can be reconstructed from the imagery recorded by surveying vehicles. The vastness of image material gathered by these vehicles, however, puts extreme demands on vision algorithms to ensure their practical usability. Algorithms need to be as fast as possible and should result in compact, memory efficient 3D city models for future ease of distribution and visualization. For the considered application, these are not contradictory demands. Simplified geometry assumptions can speed up vision algorithms while automatically guaranteeing compact geometry models. In this paper, we present a novel city modeling framework which builds upon this philosophy to create 3D content at high speed. Objects in the environment, such as cars and pedestrians, may however disturb the reconstruction, as they violate the simplified geometry assumptions, leading to visually unpleasant artifacts and degrading the visual realism of the resulting 3D city model. Unfortunately, such objects are prevalent in urban scenes. We therefore extend the reconstruction framework by integrating it with an object recognition module that automatically detects cars in the input video streams and localizes them in 3D. The two components of our system are tightly integrated and benefit from each other’s continuous input. 3D reconstruction delivers geometric scene context, which greatly helps improve detection precision. The detected car locations, on the other hand, are used to instantiate virtual placeholder models which augment the visual realism of the reconstructed city model.
Using Recognition to Guide a Robot’s Attention

In the transition from industrial to service robotics, robots will have to deal with increasingly unpredictable and variable environments. We present a system that is able to recognize objects of a certain class in an image and to identify their parts for potential interactions. This is demonstrated for object instances that have never been observed during training, and under partial occlusion and against cluttered backgrounds. Our approach builds on the Implicit Shape Model of Leibe and Schiele, and extends it to couple recognition to the provision of meta-data useful for a task. Meta-data can for example consist of part labels or depth estimates. We present experimental results on wheelchairs and cars.
Measuring camera translation by the dominant apical angle
This paper provides a technique for measuring camera translation relatively w.r.t. the scene from two images. We demonstrate that the amount of the translation can be reliably measured for general as well as planar scenes by the most frequent apical angle, the angle under which the camera centers are seen from the perspective of the reconstructed scene points. Simulated experiments show that the dominant apical angle is a linear function of the length of the true camera translation. In a real experiment, we demonstrate that by skipping image pairs with too small motion, we can reliably initialize structure from motion, compute accurate camera trajectory in order to rectify images and use the ground plane constraint in recognition of pedestrians in a hand-held video sequence.
Accurate and Robust Registration for In-hand Modeling
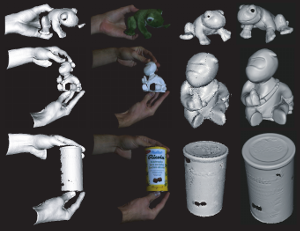
We present fast 3D surface registration methods for inhand modeling. This allows users to scan complete objects swiftly by simply turning them around in front of the scanner. The paper makes two main contributions. First, we propose an efficient method for detecting registration failures, which is a vital property of any automatic modeling system. Our method is based on two different consistency tests, one based on geometry and one based on texture. Second, we extend ICP by three additional fast registration methods for both coarse and fine alignment based on both texture and geometry. Each of those methods brings in additional information that can compensate for ambiguities in the other cues. Together, they allow for the robust reconstruction of a large variety of objects with different geometric and photometric properties. Finally, we show how both failure detection and fast registration can be combined in a practical and robust in-hand modeling system that operates at interactive frame rates.
A Mobile Vision System for Robust Multi-Person Tracking
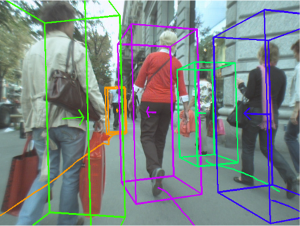
We present a mobile vision system for multi-person tracking in busy environments. Specifically, the system integrates continuous visual odometry computation with tracking-by-detection in order to track pedestrians in spite of frequent occlusions and egomotion of the camera rig. To achieve reliable performance under real-world conditions, it has long been advocated to extract and combine as much visual information as possible. We propose a way to closely integrate the vision modules for visual odometry, pedestrian detection, depth estimation, and tracking. The integration naturally leads to several cognitive feedback loops between the modules. Among others, we propose a novel feedback connection from the object detector to visual odometry which utilizes the semantic knowledge of detection to stabilize localization. Feedback loops always carry the danger that erroneous feedback from one module is amplified and causes the entire system to become instable. We therefore incorporate automatic failure detection and recovery, allowing the system to continue when a module becomes unreliable. The approach is experimentally evaluated on several long and difficult video sequences from busy inner-city locations. Our results show that the proposed integration makes it possible to deliver stable tracking performance in scenes of previously infeasible complexity.
World-scale Mining of Objects and Events from Community Photo Collections

In this paper, we describe an approach for mining images of objects (such as touristic sights) from community photo col- lections in an unsupervised fashion. Our approach relies on retrieving geotagged photos from those web-sites using a grid of geospatial tiles. The downloaded photos are clustered into potentially interesting entities through a processing pipeline of several modalities, including visual, textual and spatial proximity. The resulting clusters are analyzed and are automatically classified into objects and events. Using mining techniques, we then find text labels for these clusters, which are used to again assign each cluster to a corresponding Wikipedia article in a fully unsupervised manner. A final ver- ification step uses the contents (including images) from the selected Wikipedia article to verify the cluster-article assignment. We demonstrate this approach on several urban areas, densely covering an area of over 700 square kilometers and mining over 200,000 photos, making it probably the largest experiment of its kind to date.
Probabilistic Parameter Selection for Learning Scene Structure from Video
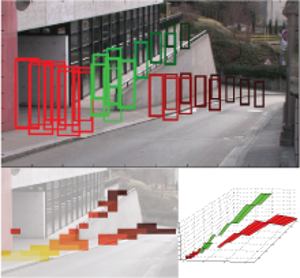
We present an online learning approach for robustly combining unreliable observations from a pedestrian detector to estimate the rough 3D scene geometry from video sequences of a static camera. Our approach is based on an entropy modelling framework, which allows to simultaneously adapt the detector parameters, such that the expected information gain about the scene structure is maximised. As a result, our approach automatically restricts the detector scale range for each image region as the estimation results become more confident, thus improving detector run-time and limiting false positives.
Coupled Object Detection and Tracking from Static Cameras and Moving Vehicles
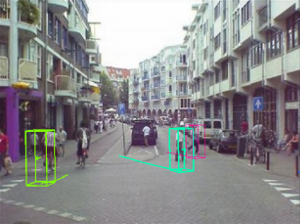
We present a novel approach for multi-object tracking which considers object detection and spacetime trajectory estimation as a coupled optimization problem. Our approach is formulated in a Minimum Description Length hypothesis selection framework, which allows our system to recover from mismatches and temporarily lost tracks. Building upon a state-of-the-art object detector, it performs multi-view/multi-category object recognition to detect cars and pedestrians in the input images. The 2D object detections are checked for their consistency with (automatically estimated) scene geometry and are converted to 3D observations, which are accumulated in a world coordinate frame. A subsequent trajectory estimation module analyzes the resulting 3D observations to find physically plausible spacetime trajectories. Tracking is achieved by performing model selection after every frame. At each time instant, our approach searches for the globally optimal set of spacetime trajectories which provides the best explanation for the current image and for all evidence collected so far, while satisfying the constraints that no two objects may occupy the same physical space, nor explain the same image pixels at any point in time. Successful trajectory hypotheses are then fed back to guide object detection in future frames. The optimization procedure is kept efficient through incremental computation and conservative hypothesis pruning. We evaluate our approach on several challenging video sequences and demonstrate its performance on both a surveillance-type scenario and a scenario where the input videos are taken from inside a moving vehicle passing through crowded city areas.
Articulated Multi-Body Tracking Under Egomotion
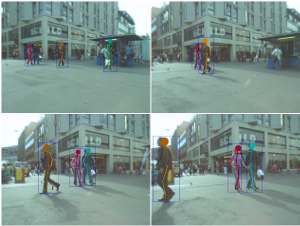
In this paper, we address the problem of 3D articulated multi-person tracking in busy street scenes from a moving, human-level observer. In order to handle the complexity of multi-person interactions, we propose to pursue a two-stage strategy. A multi-body detection-based tracker first analyzes the scene and recovers individual pedestrian trajectories, bridging sensor gaps and resolving temporary occlusions. A specialized articulated tracker is then applied to each recovered pedestrian trajectory in parallel to estimate the tracked person's precise body pose over time. This articulated tracker is implemented in a Gaussian Process framework and operates on global pedestrian silhouettes using a learned statistical representation of human body dynamics. We interface the two tracking levels through a guided segmentation stage, which combines traditional bottom-up cues with top-down information from a human detector and the articulated tracker's shape prediction. We show the proposed approach's viability and demonstrate its performance for articulated multi-person tracking on several challenging video sequences of a busy inner-city scenario.
LaserBrush: A Flexible Device for 3D Reconstruction of Indoor Scenes
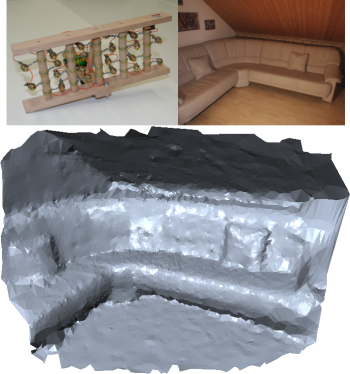
While many techniques for the 3D reconstruction of small to medium sized objects have been proposed in recent years, the reconstruction of entire scenes is still a challenging task. This is especially true for indoor environments where existing active reconstruction techniques are usually quite expensive and passive, image-based techniques tend to fail due to high scene complexities, difficult lighting situations, or shiny surface materials. To fill this gap we present a novel low-cost method for the reconstruction of depth maps using a video camera and an array of laser pointers mounted on a hand-held rig. Similar to existing laser-based active reconstruction techniques, our method is based on a fixed camera, moving laser rays and depth computation by triangulation. However, unlike traditional methods, the position and orientation of the laser rig does not need to be calibrated a-priori and no precise control is necessary during image capture. The user rather moves the laser rig freely through the scene in a brush-like manner, letting the laser points sweep over the scene's surface. We do not impose any constraints on the distribution of the laser rays, the motion of the laser rig, or the scene geometry except that in each frame at least six laser points have to be visible. Our main contributions are two-fold. The first is the depth map reconstruction technique based on irregularly oriented laser rays that, by exploiting robust sampling techniques, is able to cope with missing and even wrongly detected laser points. The second is a smoothing operator for the reconstructed geometry specifically tailored to our setting that removes most of the inevitable noise introduced by calibration and detection errors without damaging important surface features like sharp edges.
An Incremental Approach to Feature Aligned Quad Dominant Remeshing
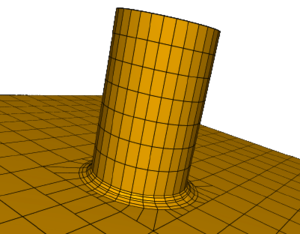
In this paper we present a new algorithm which turns an unstructured triangle mesh into a quad-dominant mesh with edges aligned to the principal directions of the underlying geometry. Instead of computing a globally smooth parameterization or integrating curvature lines along a tangent vector field, we simply apply an iterative relaxation scheme which incrementally aligns the mesh edges to the principal directions. The quad-dominant mesh is eventually obtained by dropping the not-aligned diagonals from the triangle mesh. A post-processing stage is introduced to further improve the results. The major advantage of our algorithm is its conceptual simplicity since it is merely based on elementary mesh operations such as edge collapse, flip, and split. The resulting meshes exhibit a very good alignment to surface features and rather uniform distribution of mesh vertices. This makes them very well-suited, e.g., as Catmull-Clark Subdivision control meshes.
Semantic representation of complex building structures

In this paper we present an abstract semantic representation that is suitable for complex buildings. Facades with high-level detail are required in several domains, e.g. visualization of architectural settings and archaeological sites as well as computer animations. In order to support the user’s modeling task, besides geometrical data structural information like spatial relations is required. This supplementary information represents the semantics of the model. Therefore the model description must incorporate the geometry and the semantics. Such a description allows a partial automation of the modeling process, e.g. adjacent and nested elements are adjusted automatically. An abstract model representation with integrated semantics is presented in this paper and it is shown that it facilitates the modeling task significantly.
@inproceedings{Finkenzeller08,
author = {Dieter Finkenzeller and Jan Bender},
title = {Semantic representation of complex building structures},
booktitle = {Computer Graphics and Visualization (CGV 2008) - IADIS Multi Conference on Computer Science and Information Systems},
year = {2008},
month = jul,
address = {Amsterdam (Netherlands)}
}
Impulse-based simulation of inextensible cloth
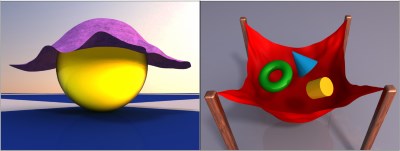
In this paper an impulse-based method for cloth simulation is presented. The simulation of cloth is required in different application areas like computer animation, virtual reality or computer games. Simulation methods often assume that cloth is an elastic material. With this assumption the simulation can be performed very efficiently using spring forces. The problem is that many textiles cannot be stretched significantly. A realistic simulation of these textiles with spring forces leads to stiff differential equations which cause a deterioration of performance. The impulse-based method described in this paper solves this problem and allows the realistic simulation of inelastic textiles.
@inproceedings{Bender08,
author = {Jan Bender and Daniel Bayer},
title = {Impulse-based simulation of inextensible cloth},
booktitle = {Computer Graphics and Visualization (CGV 2008) - IADIS Multi Conference on Computer Science and Information Systems},
year = {2008},
month = jul,
address = {Amsterdam (Netherlands)}
}
City Virtualization

Virtual city models become more and more important in applications like virtual city guides, geographic information systems or large scale visualizations, and also play an important role during the design of wireless networks and the simulation of noise distribution or environmental phenomena. However, generating city models of sufficient quality with respect to different target applications is still an extremely challenging, time consuming and costly process. To improve this situation, we present a novel system for the rapid and easy creation of 3D city models from 2D map data and terrain information, which is available for many cities in digital form. Our system allows to continuously vary the resulting level of correctness, ranging from models with high-quality geometry and plausible appearance which are generated almost completely automatic to models with correctly textured facades and highly detailed representations of important, well known buildings which can be generated with reasonable additional effort. While our main target application is the high-quality, real-time visualization of complex, detailed city models, the models generated with our approach have successfully been used for radio wave simulations as well. To demonstrate the validity of our approach, we show an exemplary reconstruction of the city of Aachen.
Quadrangular Parameterization for Reverse Engineering

The aim of Reverse Engineering is to convert an unstructured representation of a geometric object, emerging e.g. from laser scanners, into a natural, structured representation in the spirit of CAD models, which is suitable for numerical computations. Therefore we present a user-controlled, as isometric as possible parameterization technique which is able to prescribe geometric features of the input and produces high-quality quadmeshes with low distortion. Starting with a coarse, user-prescribed layout this is achieved by using affine functions for the transition between non-orthogonal quadrangular charts of a global parameterization. The shape of each chart is optimized non-linearly for isometry of the underlying parameterization to produce meshes with low edge-length distortion. To provide full control over the meshing alignment the user can additionally tag an arbitrary subset of the layout edges which are guaranteed to be represented by enforcing them to lie on iso-lines of the parameterization but still allowing the global parameterization to relax in the direction of the iso-lines.
Impulsbasierte Dynamiksimulation von Mehrkörpersystemen in der virtuellen Realität
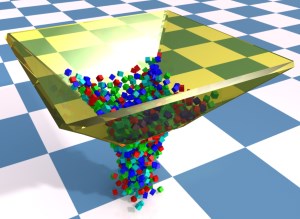
Die dynamische Simulation gewinnt im Bereich der virtuellen Realität immer mehr an Bedeutung. Sie ist ein wichtiges Hilfsmittel, um den Grad der Immersion des Benutzers in eine virtuelle Welt zu erhöhen. In diesem Anwendungsbereich ist die Geschwindigkeit des verwendeten Simulationsverfahrens entscheidend. Weitere Anforderungen an das Verfahren sind unter anderem Genauigkeit, Stabilität und eine einfache Implementierung. In dieser Arbeit wird ein neues impulsbasiertes Verfahren für die dynamische Simulation von Mehrkörpersystemen vorgestellt. Dieses erfüllt, im Gegensatz zu klassischen Verfahren, alle Anforderungen der virtuellen Realität. Das vorgestellte Verfahren arbeitet ausschließlich mit Impulsen, um mechanische Gelenke, Kollisionen und bleibende Kontakte mit Reibung zu simulieren.
@inproceedings{Bender08,
author = {Jan Bender},
title = {Impulsbasierte Dynamiksimulation von Mehrkörpersystemen in der virtuellen Realität},
booktitle = {GI-Edition Lecture Notes in Informatics (LNI) - Ausgezeichnete Informatikdissertationen 2007},
year = {2008},
pages = {21-30}
}
Vergleich der impulsbasierten Dynamiksimulation mit der Lagrange-Faktoren-Methode
Eine der am weitesten verbreiteten Methoden zur Simulation von mechanischen Starrkörpersystemen ist die Lagrange-Faktoren-Methode (LFM). Die impulsbasierte Dynamiksimulation ist ein neuer alternativer Ansatz zur Simulation solcher Systeme. Durch den direkten Vergleich werden in dieser Arbeit die Vor- und Nachteile der beiden Methoden aufgezeigt. Dazu wird neben einer Laufzeit- und Genauigkeitsmessung zusätzlich ein informeller Vergleich durchgeführt und die Ergebnisse diskutiert.
@inproceedings{Bayer08,
author = {Daniel Bayer and Jan Bender},
title = {Vergleich der impulsbasierten Dynamiksimulation mit der Lagrange-Faktoren-Methode},
booktitle = {5. Workshop "Virtuelle und Erweiterte Realität der Fachgruppe VR/AR"},
year = {2008},
month = sep,
address = {Magdeburg (Germany)},
pages = {185-196}
}
Design of a dynamic simulation system for VR applications
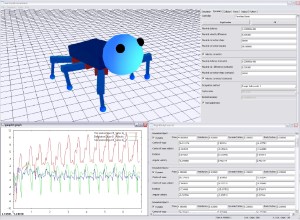
A dynamic simulation system for VR applications consists of multiple parts. The first task that must be accomplished is the generation of complex dynamic models. A 3D modelling tool is required that supports the definition of joint constraints and dynamic parameters. For the dynamic simulation of the generated models a modular simulator is required. This simulator must handle constrained models, detect and resolve collisions regarding dynamic and static friction, manage user interactions and provide the possibility of extensions. It also requires an interface for the output of the simulation data. There exist several different methods for the dynamic simulation of joint constraints, for collision detection and for the handling of collisions and resting contacts with friction. The simulation system should support multiple of these methods and provide the possibility to exchange them at runtime.
@TechReport{Bender08_13,
author = "Jan Bender",
title = "Design of a dynamic simulation system for VR applications",
institution = "University of Karlsruhe",
year = "2008",
type = "Technical Report",
number = "13"
}
A Sketch-Based Interface for Architectural Modification in Virtual Environments
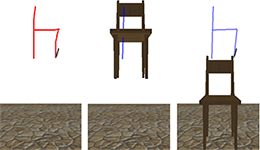
This paper presents a sketch-based interface for interactive modification of architectural design prototypes inside a virtual environment. The user can move around in the scenery and create line drawings to add annotations. In order to modify or extend the scenery, she can sketch command symbols, which are then recognized by the application to trigger the application defined commands. This allows the user to modify existing objects in the scene as well as to create new ones. This sketch based interface is supposed to act as a front-end application for architects in order to have a tool for the interactive reconfiguration of rooms and interior in a visual-acoustic virtual environment.
@inproceedings{rausch2008sketch,
title={ A Sketch-Based Interface for Architectural Modification in Virtual Environments},
author={Rausch, Dominik and Assenmacher, Ingo},
booktitle={5. Workshop der GI-Fachgruppe VR/AR },
year={2008}
}
Dynamic 3D Scene Analysis from a Moving Vehicle

In this paper, we present a system that integrates fully automatic scene geometry estimation, 2D object detection, 3D localization, trajectory estimation, and tracking for dynamic scene interpretation from a moving vehicle. Our sole input are two video streams from a calibrated stereo rig on top of a car. From these streams, we estimate Structurefrom-Motion (SfM) and scene geometry in real-time. In parallel, we perform multi-view/multi-category object recognition to detect cars and pedestrians in both camera images. Using the SfM self-localization, 2D object detections are converted to 3D observations, which are accumulated in a world coordinate frame. A subsequent tracking module analyzes the resulting 3D observations to find physically plausible spacetime trajectories. Finally, a global optimization criterion takes object-object interactions into account to arrive at accurate 3D localization and trajectory estimates for both cars and pedestrians. We demonstrate the performance of our integrated system on challenging real-world data showing car passages through crowded city areas.
Coupled Detection and Trajectory Estimation for Multi-Object Tracking
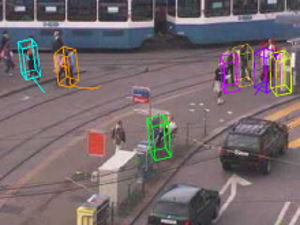
We present a novel approach for multi-object tracking which considers object detection and spacetime trajectory estimation as a coupled optimization problem. It is formulated in a hypothesis selection framework and builds upon a state-of-the-art pedestrian detector. At each time instant, it searches for the globally optimal set of spacetime trajectories which provides the best explanation for the current image and for all evidence collected so far, while satisfying the constraints that no two objects may occupy the same physical space, nor explain the same image pixels at any point in time. Successful trajectory hypotheses are fed back to guide object detection in future frames. The optimization procedure is kept efficient through incremental computation and conservative hypothesis pruning. The resulting approach can initialize automatically and track a large and varying number of persons over long periods and through complex scenes with clutter, occlusions, and large-scale background changes. Also, the global optimization framework allows our system to recover from mismatches and temporarily lost tracks. We demonstrate the feasibility of the proposed approach on several challenging video sequences.
Fast 3D Scanning with Automatic Motion Compensation

We present a novel 3D scanning system combining stereo and active illumination based on phase-shift for robust and accurate scene reconstruction. Stereo overcomes the traditional phase discontinuity problem and allows for the reconstruction of complex scenes containing multiple objects. Due to the sequential recording of three patterns, motion will introduce artifacts in the reconstruction. We develop a closed-form expression for the motion error in order to apply motion compensation on a pixel level. The resulting scanning system can capture accurate depth maps of complex dynamic scenes at 17 fps and can cope with both rigid and deformable objects.
Efficient Mining of Frequent and Distinctive Feature Configurations
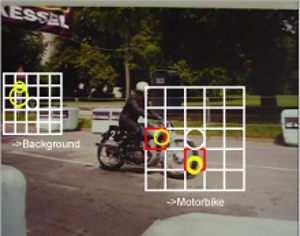
We present a novel approach to automatically find spatial configurations of local features occurring frequently on instances of a given object class, and rarely on the background. The approach is based on computationally effi- cient data mining techniques and can find frequent con- figurations among tens of thousands of candidates within seconds. Based on the mined configurations we develop a method to select features which have high probability of lying on previously unseen instances of the object class. The technique is meant as an intermediate processing layer to filter the large amount of clutter features returned by lowlevel feature extraction, and hence to facilitate the tasks of higher-level processing stages such as object detection.
Depth and Appearance for Mobile Scene Analysis
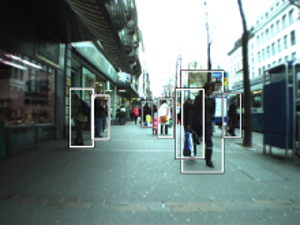
In this paper, we address the challenging problem of simultaneous pedestrian detection and ground-plane estimation from video while walking through a busy pedestrian zone. Our proposed system integrates robust stereo depth cues, ground-plane estimation, and appearance-based object detection in a principled fashion using a graphical model. Object-object occlusions lead to complex interactions in this model that make an exact solution computationally intractable. We therefore propose a novel iterative approach that first infers scene geometry using Belief Propagation and then resolves interactions between objects using a global optimization procedure. This approach leads to a robust solution in few iterations, while allowing object detection to benefit from geometry estimation and vice versa. We quantitatively evaluate the performance of our proposed approach on several challenging test sequences showing strolls through busy shopping streets. Comparisons to various baseline systems show that it outperforms both a system using no scene geometry and one just relying on Structure-from-Motion without dense stereo
@InProceedings{eth_biwi_00498,
author = {A. Ess and B. Leibe and L. Van Gool},
title = {Depth and Appearance for Mobile Scene Analysis},
booktitle = {International Conference on Computer Vision (ICCV'07)},
year = {2007},
month = {October},
keywords = {}
}
On-the-fly Curve-skeleton Computation for 3D Shapes
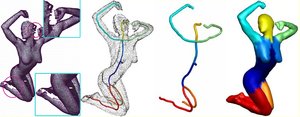
The curve-skeleton of a 3D object is an abstract geometrical and topological representation of its 3D shape. It maps the spatial relation of geometrically meaningful parts to a graph structure. Each arc of this graph represents a part of the object with roughly constant diameter or thickness, and approximates its centerline. This makes the curve-skeleton suitable to describe and handle articulated objects such as characters for animation. We present an algorithm to extract such a skeleton on-the-fly, both from point clouds and polygonal meshes. The algorithm is based on a deformable model evolution that captures the object’s volumetric shape. The deformable model involves multiple competing fronts which evolve inside the object in a coarse-to-fine manner. We first track these fronts’ centers, and then merge and filter the resulting arcs to obtain a curve-skeleton of the object. The process inherits the robustness of the reconstruction technique, being able to cope with noisy input, intricate geometry and complex topology. It creates a natural segmentation of the object and computes a center curve for each segment while maintaining a full correspondence between the skeleton and the boundary of the object.
Impulse-based dynamic simulation in linear time

This paper describes an impulse-based dynamic simulation method for articulated bodies which has a linear time complexity. Existing linear-time methods are either based on a reduced-coordinate formulation or on Lagrange multipliers. The impulse-based simulation has advantages over these well-known methods. Unlike reduced-coordinate methods, it handles nonholonomic constraints like velocity-dependent ones and is very easy to implement. In contrast to Lagrange multiplier methods the impulse-based approach has no drift problem and an additional stabilisation is not necessary. The presented method computes a simulation step in O(n) time for acyclic multi-body systems containing equality constraints. Closed kinematic chains can be handled by dividing the model into different acyclic parts. Each of these parts is solved independently from each other. The dependencies between the single parts are solved by an iterative method. In the same way inequality constraints can be integrated in the simulation process in order to handle collisions and permanent contacts with dynamic and static friction.
@article{Bender07,
author = {Jan Bender},
title = {Impulse-based dynamic simulation in linear time},
journal = {Computer Animation and Virtual Worlds},
volume = {18},
number = {4-5},
year = {2007},
issn = {1546-4261},
pages = {225--233},
doi = {http://dx.doi.org/10.1002/cav.v18:4/5},
publisher = {John Wiley and Sons Ltd.},
address = {Chichester, UK, UK},
}
Depth-from-Recognition: Inferring Meta-data through Cognitive Feedback

Thanks to recent progress in category-level object recognition, we have now come to a point where these techniques have gained sufficient maturity and accuracy to succesfully feed back their output to other processes. This is what we refer to as cognitive feedback. In this paper, we study one particular form of cognitive feedback, where the ability to recognize objects of a given category is exploited to infer meta-data such as depth cues, 3D points, or object decomposition in images of previously unseen object instances. Our approach builds on the Implicit Shape Model of Leibe and Schiele, and extends it to transfer annotations from training images to test images. Experimental results validate the viability of our approach.
GPU-Based Multiresolution Deformation Using Approximate Normal Field Reconstruction
Multiresolution shape editing performs global deformations while preserving fine surface details by modifying a smooth base surface and reconstructing the modified detailed surface as a normal displacement from it. Since two non-trivial operators (deformation and reconstruction) are involved, the computational complexity can become too high for real-time deformations of complex models. We present an efficient technique for evaluating multiresolution deformations of high-resolution triangle meshes directly on the GPU. By precomputing the deformation functions as well as their gradient information we can map both the deformation and the reconstruction operator to the GPU, which enables us to reconstruct the deformed positions and sufficiently close approximations of the normal vectors in the vertex shader in a single rendering pass. This allows us to render dynamically deforming 3D models several times faster than on the CPU. We demonstrate the application of our technique to two modern multiresolution approaches: one based on (irregular) displaced subdivision surfaces and the other one on volumetric space deformation using radial basis functions.
Impulsbasierte Dynamiksimulation von Mehrkörpersystemen in der virtuellen Realität
Die dynamische Simulation gewinnt im Bereich der virtuellen Realität immer mehr an Bedeutung. Sie ist ein wichtiges Hilfsmittel, um den Grad der Immersion des Benutzers in eine virtuelle Welt zu erhöhen. In diesem Anwendungsbereich ist die Geschwindigkeit des verwendeten Simulationsverfahrens entscheidend. Weitere Anforderungen an das Verfahren sind unter anderem Genauigkeit, Stabilität und eine einfache Implementierung.
In dieser Arbeit wird ein neues impulsbasiertes Verfahren für die dynamische Simulation von Mehrkörpersystemen vorgestellt. Dieses erfüllt, im Gegensatz zu klassischen Verfahren, alle Anforderungen der virtuellen Realität. Das vorgestellte Verfahren arbeitet ausschließlich mit Impulsen, um mechanische Gelenke, Kollisionen und bleibende Kontakte mit Reibung zu simulieren.
@PhdThesis{Bender07,
author = {Jan Bender},
title = {Impulsbasierte Dynamiksimulation von Mehrk{\"o}rpersystemen in der virtuellen Realit{\"a}t},
school = {University of Karlsruhe, Germany},
year = {2007},
month = feb,
}
Accurate Computation of Geodesic Distance Fields for Polygonal Curves on Triangle Meshes
We present an algorithm for the efficient and accurate computation of geodesic distance fields on triangle meshes. We generalize the algorithm originally proposed by Surazhsky et al. . While the original algorithm is able to compute geodesic distances to isolated points on the mesh only, our generalization can handle arbitrary, possibly open, polygons on the mesh to define the zero set of the distance field. Our extensions integrate naturally into the base algorithm and consequently maintain all its nice properties. For most geometry processing algorithms, the exact geodesic distance information is sampled at the mesh vertices and the resulting piecewise linear interpolant is used as an approximation to the true distance field. The quality of this approximation strongly depends on the structure of the mesh and the location of the medial axis of the distance fild. Hence our second contribution is a simple adaptive refinement scheme, which inserts new vertices at critical locations on the mesh such that the final piecewise linear interpolant is guaranteed to be a faithful approximation to the true geodesic distance field.
A Surface-Growing Approach to Multi-View Stereo Reconstruction

We present a new approach to reconstruct the shape of a 3D object or scene from a set of calibrated images. The central idea of our method is to combine the topological flexibility of a point-based geometry representation with the robust reconstruction properties of scene-aligned planar primitives. This can be achieved by approximating the shape with a set of surface elements (surfels) in the form of planar disks which are independently fitted such that their footprint in the input images matches. Instead of using an artificial energy functional to promote the smoothness of the recovered surface during fitting, we use the smoothness assumption only to initialize planar primitives and to check the feasibility of the fitting result. After an initial disk has been found, the recovered region is iteratively expanded by growing further disks in tangent direction. The expansion stops when a disk rotates by more than a given threshold during the fitting step. A global sampling strategy guarantees that eventually the whole surface is covered. Our technique does not depend on a shape prior or silhouette information for the initialization and it can automatically and simultaneously recover the geometry, topology, and visibility information which makes it superior to other state-of-the-art techniques. We demonstrate with several high-quality reconstruction examples that our algorithm performs highly robustly and is tolerant to a wide range of image capture modalities.
Fast Interactive Region of Interest Selection for Volume Visualization
We describe a new method to support the segmentation of a volumetric MRI- or CT-dataset such that only the components selected by the user are displayed by a volume renderer for visual inspection. The goal is to combine the advantages of direct volume rendering (high efficiency and semi-transparent display of internal structures) and indirect volume rendering (well defined surface geometry and topology). Our approach is based on a re-labeling of the input volume's set of isosurfaces which allows the user to peel off the outer layers and to distinguish unconnected voxel components which happen to have the same voxel values. For memory and time efficiency, isosurfaces are never generated explicitly. Instead a second voxel grid is computed which stores a discretization of the new isosurface labels. Hence the masking of unwanted regions as well as the direct volume rendering of the desired regions of interest (ROI) can be implemented on the GPU which enables interactive frame rates even while the user changes the selection of the ROI.
Character Animation from 2D Pictures and 3D Motion Data

This paper presents a new method to animate photos of 2D characters using 3D motion capture data. Given a single image of a person or essentially human-like subject our method transfers the motion of a 3D skeleton onto the subject's 2D shape in image space, generating the impression of a realistic movement. We present robust solutions to reconstruct a projective camera model and a 3D model pose which matches best to the given 2D image. Depending on the reconstructed view, a 2D shape template is selected which enables the proper handling of occlusions. After fitting the template to the character in the input image, it is deformed as-rigid-as-possible by taking the projected 3D motion data into account. Unlike previous work our method thereby correctly handles projective shape distortion. It works for images from arbitrary views and requires only a small amount of user interaction. We present animations of a diverse set of human (and non-human) characters with different types of motions such as walking, jumping, or dancing.
Towards Multi-View Object Class Detection
We present a novel system for generic object class de- tection. In contrast to most existing systems which focus on a single viewpoint or aspect, our approach can detect ob- ject instances from arbitrary viewpoints. This is achieved by combining the Implicit Shape Model for object class de- tection proposed by Leibe and Schiele with the multi-view specific object recognition system of Ferrari et al. After learning single-view codebooks, these are inter- connected by so-called activation links, obtained through multi-view region tracks across different training views of individual object instances. During recognition, these inte- grated codebooks work together to determine the location and pose of the object. Experimental results demonstrate the viability of the approach and compare it to a bank of independent single-view detectors.
Multi-Aspect Detection of Articulated Objects
A wide range of methods have been proposed to detect and recognize objects. However, effective and efficient multi- viewpoint detection of objects is still in its infancy, since most current approaches can only handle single viewpoints or as- pects. This paper proposes a general approach for multi- aspect detection of objects. As the running example for de- tection we use pedestrians, which add another difficulty to the problem, namely human body articulations. Global ap- pearance changes caused by different articulations and view- points of pedestrians are handled in a unified manner by a generalization of the Implicit Shape Model [5]. An important property of this new approach is to share local appearance across different articulations and viewpoints, therefore re- quiring relatively few training samples. The effectiveness of the approach is shown and compared to previous approaches on two datasets containing pedestrians with different articu- lations and from multiple viewpoints.
Multiple Object Class Detection with a Generative Model
In this paper we propose an approach capable of si- multaneous recognition and localization of multiple object classes using a generative model. A novel hierarchical rep- resentation allows to represent individual images as well as various objects classes in a single, scale and rotation invari- ant model. The recognition method is based on a codebook representation where appearance clusters built from edge based features are shared among several object classes. A probabilistic model allows for reliable detection of various objects in the same image. The approach is highly effi- cient due to fast clustering and matching methods capable of dealing with millions of high dimensional features. The system shows excellent performance on several object cate- gories over a wide range of scales, in-plane rotations, back- ground clutter, and partial occlusions. The performance of the proposed multi-object class detection approach is com- petitive to state of the art approaches dedicated to a single object class recognition problem.
Competing Fronts for Coarse-to-Fine Surface Reconstruction
We present a deformable model to reconstruct a surface from a point cloud. The model is based on an explicit mesh representation composed of multiple competing evolving fronts. These fronts adapt to the local feature size of the target shape in a coarse-to-fine manner. Hence, they approach towards the finer (local) features of the target shape only after the reconstruction of the coarse (global) features has been completed. This conservative approach leads to a better control and interpretation of the reconstructed topology. The use of an explicit representation for the deformable model guarantees water-tightness and simple tracking of topological events. Furthermore, the coarse-to-fine nature of reconstruction enables adaptive handling of non-homogenous sample density, including robustness to missing data in defected areas.
Robust Reconstruction of Watertight 3D Models from Non-uniformly Sampled Point Clouds Without Normal Information

We present a new volumetric method for reconstructing watertight triangle meshes from arbitrary, unoriented point clouds. While previous techniques usually reconstruct surfaces as the zero level-set of a signed distance function, our method uses an unsigned distance function and hence does not require any information about the local surface orientation. Our algorithm estimates local surface confidence values within a dilated crust around the input samples. The surface which maximizes the global confidence is then extracted by computing the minimum cut of a weighted spatial graph structure. We present an algorithm, which efficiently converts this cut into a closed, manifold triangle mesh with a minimal number of vertices. The use of an unsigned distance function avoids the topological noise artifacts caused by misalignment of 3D scans, which are common to most volumetric reconstruction techniques. Due to a hierarchical approach our method efficiently produces solid models of low genus even for noisy and highly irregular data containing large holes, without loosing fine details in densely sampled regions. We show several examples for different application settings such as model generation from raw laser-scanned data, image-based 3D reconstruction, and mesh repair.
PriMo: Coupled Prisms for Intuitive Surface Modeling

We present a new method for 3D shape modeling that achieves intuitive and robust deformations by emulating physically plausible surface behavior inspired by thin shells and plates. The surface mesh is embedded in a layer of volumetric prisms, which are coupled through non-linear, elastic forces. To deform the mesh, prisms are rigidly transformed to satisfy user constraints while minimizing the elastic energy. The rigidity of the prisms prevents degenerations even under extreme deformations, making the method numerically stable. For the underlying geometric optimization we employ both local and global shape matching techniques. Our modeling framework allows for the specification of various geometrically intuitive parameters that provide control over the physical surface behavior. While computationally more involved than previous methods, our approach significantly improves robustness and simplifies user interaction for large, complex deformations.
A Robust Two-Step Procedure for Quad-Dominant Remeshing
We propose a new technique for quad-dominant remeshing which separates the local regularity requirements from the global alignment requirements by working in two steps. In the first step, we apply a slight variant of variational shape approximation in order to segment the input mesh into patches which capture the global structure of the processed object. Then we compute an optimized quad-mesh for every patch by generating a finite set of candidate curves and applying a combinatorial optimization procedure. Since the optimization is performed independently for each patch, we can afford more complex operations while keeping the overall computation times at a reasonable level. Our quad-meshing technique is robust even for noisy meshes and meshes with isotropic or flat regions since it does not rely on the generation of curves by integration along estimated principal curvature directions. Instead we compute a conformal parametrization for each patch and generate the quad-mesh from curves with minimum bending energy in the 2D parameter domain. Mesh consistency between patches is guaranteed by simply using the same set of sample points along the common boundary curve. The resulting quad-meshes are of high-quality locally (shape of the quads) as well as globally (global alignment) which allows us to even generate fairly coarse quad-meshes that can be used as Catmull-Clark control meshes.
Point-Based Multiscale Surface Representation
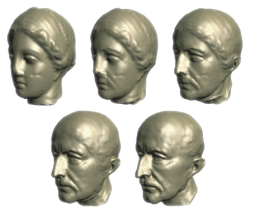
In this article we present a new multiscale surface representation based on point samples. Given an unstructured point cloud as input, our method first computes a series of point-based surface approximations at successively higher levels of smoothness, that is, coarser scales of detail, using geometric low-pass filtering. These point clouds are then encoded relative to each other by expressing each level as a scalar displacement of its predecessor. Low-pass filtering and encoding are combined in an efficient multilevel projection operator using local weighted least squares fitting.
Our representation is motivated by the need for higher-level editing semantics which allow surface modifications at different scales. The user would be able to edit the surface at different approximation levels to perform coarse-scale edits on the whole model as well as very localized modifications on the surface detail. Additionally, the multiscale representation provides a separation in geometric scale which can be understood as a spectral decomposition of the surface geometry. Based on this observation, advanced geometric filtering methods can be implemented that mimic the effects of Fourier filters to achieve effects such as smoothing, enhancement, or band-bass filtering.
Constraint-based collision and contact handling using impulses
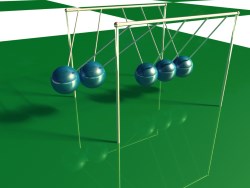
In this paper a new method for handling collisions and permanent contacts between rigid bodies is presented. Constraint-based methods for computing contact forces with friction provide a high degree of accuracy. The computation is often transformed into an optimization problem and solved with techniques like linear or quadratic programming. Impulse-based methods compute impulses to prevent colliding bodies from interpenetrating. The determination of these impulses is simple and fast. The impulse-based methods are very efficient but they are less accurate than the constraint-based methods because they resolve only one contact between two colliding bodies at the same time. The presented method uses a constraint-based approach. It can handle multiple contacts between two colliding bodies at the same time. For every collision and contact a non-penetration constraint is defined. These constraints are satisfied by iteratively computing impulses. In the same iteration loop impulses for dynamic and static friction are determined. The new method provides the accuracy of a constraint-based method and is efficient and easy to implement like an impulse-based one.
@inproceedings{Bender06,
author = {Jan Bender and Alfred Schmitt},
title = {Constraint-based collision and contact handling using impulses},
booktitle = {Proceedings of the 19th international conference on computer animation and social agents},
year = {2006},
month = jul,
address = {Geneva (Switzerland)},
pages = {3-11}
}
Fast Dynamic Simulation of Multi-Body Systems Using Impulses
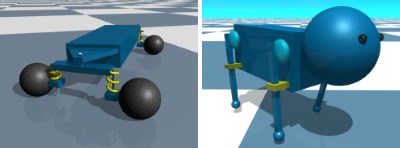
A dynamic simulation method for multi-body systems is presented in this paper. The special feature of this method is that it satisfies all given constraints by computing impulses. In each simulation step the joint states after the step are predicted. In order to obtain valid states after the simulation step, impulses are computed and applied to the connected bodies. Since a valid joint state is targeted exactly, there is no drift as the simulation proceeds in time and so no additional stabilisation is required. In previous approaches the impulses for a multi-body system were computed iteratively. Since dependencies between joints were not taken into account, the simulation of complex models was slow. A novel method is presented that uses a system of linear equations to describe these dependencies. By solving this typically sparse system the required impulses are determined. This method allows a very fast simulation of complex multi-body systems.
@inproceedings{Bender06,
author = {Jan Bender and Alfred Schmitt},
title = {Fast Dynamic Simulation of Multi-Body Systems Using Impulses},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2006},
month = nov,
address = {Madrid (Spain)},
pages = {81-90}
}
Wave Propagation Using the Photon Path Map
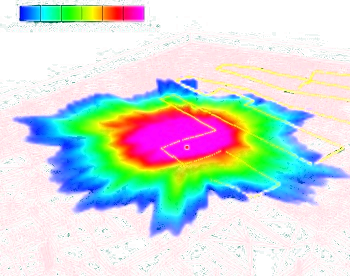
In wireless network planning, much effort is spent on the improvement of the network and transport layer -- especially for Mobile Ad Hoc Networks. Although in principle real-world measurements are necessary for this, their setup is often too complex and costly. Hence good and reliable simulation tools are needed. In this work we present a new physical layer simulation algorithm based on the extension and adaptation of recent techniques for global illumination simulation. By combining and improving these highly efficient algorithms from the field of Computer Graphics, it is possible to build a fast and flexible utility to be used for wireless network simulation. We compute a discrete sampling of the volumetric electromagnetic field by tracing stochastically generated photon paths through the scene. This so called Photon Path Map is then used to estimate the field density at any point in space and also provides local information about the delay spread. The algorithm can be applied to three dimensional indoor as well as outdoor scenarios without any changes and the path-tracing costs scale only logarithmically with the growing complexity of the underlying scene geometry.
The Effect of the Radio Wave Propagation Model in Mobile Ad Hoc Networks
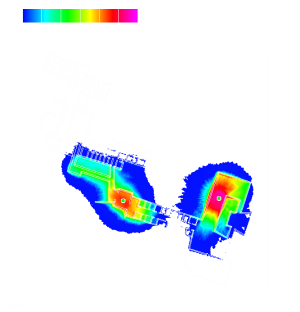
The simulation of wireless networks has been an important tool for researchers and the industry in the last years. Especially in the field of Mobile Ad Hoc Networking, most current results have been achieved using simulators. The need for reproducible results and easy to observe environments limits the use of real world measurements for those kind of networks. It is stated here that the radio wave propagation model has a strong impact on the results of the simulation run. This work shows the limitations of current simulation environments and describes a high accuracy propagation model based on the use of a ray-tracer. By using a parallelized preprocessing step we made this propagation model feasible for usage in network simulators. Based on two examples, the effects on characteristic performance properties in Mobile Ad Hoc Networks are shown. We found that the physical layer simulation has a great impact on routing protocol efficiency.
3D City Modeling Using Cognitive Loops

3D city modeling using computer vision is very chal- lenging. A typical city contains objects which are a night- mare for some vision algorithms, while other algorithms have been designed to identify exactly these parts but, in their turn, suffer from other weaknesses which limit their application. For instance, moving cars with metallic sur- faces can degrade the results of a 3D city reconstruction algorithm which is primarily based on the assumption of a static scene with diffuse reflection properties. On the other hand, a specialized object recognition algorithm could be able to detect cars, but also yields too many false positives without the availability of additional scene knowledge. In this paper, the design of a cognitive loop which intertwines both aforementioned algorithms is demonstrated for 3D city modeling, proving that the whole can be much more than the simple sum of its parts. A cognitive loop is the mutual trans- fer of higher knowledge between algorithms, which enables the combination of algorithms to overcome the weaknesses of any single algorithm. We demonstrate the promise of this approach on a real-world city modeling task using video data recorded by a survey vehicle. Our results show that the cognitive combination of algorithms delivers convincing city models which improve upon the degree of realism that is possible from a purely reconstruction-based approach.
Efficient Clustering and Matching for Object Class Recognition
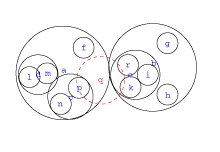
In this paper we address the problem of building object class representations based on local features and fast matching in a large database. We propose an efficient algorithm for hierarchical agglomerative clustering. We examine different agglomerative and partitional clustering strategies and compare the quality of obtained clusters. Our combination of partitional-agglomerative clustering gives significant improvement in terms of efficiency while main- taining the same quality of clusters. We also propose a method for building data structures for fast matching in high dimensional feature spaces. These improvements allow to deal with large sets of training data typically used in recognition of multiple object classes.
Segmentation Based Multi-Cue Integration for Object Detection

This paper proposes a novel method for integrating multiple local cues, i.e. lo- cal region detectors as well as descriptors, in the context of object detection. Rather than to fuse the outputs of several distinct classifiers in a fixed setup, our approach implements a highly flexible combination scheme, where the con- tributions of all individual cues are flexibly recombined depending on their ex- planatory power for each new test image. The key idea behind our approach is to integrate the cues over an estimated top-down segmentation, which allows to quantify how much each of them contributed to the object hypothesis. By combining those contributions on a per-pixel level, our approach ensures that each cue only contributes to object regions for which it is confident and that potential correlations between cues are effectively factored out. Experimental results on several benchmark data sets show that the proposed multi-cue combi- nation scheme significantly increases detection performance compared to any of its constituent cues alone. Moreover, it provides an interesting evaluation tool to analyze the complementarity of local feature detectors and descriptors.
Integrating Recognition and Reconstruction for Cognitive Traffic Scene Analysis from a Moving Vehicle

This paper presents a practical system for vision-based traffic scene analysis from a moving vehicle based on a cognitive feedback loop which in- tegrates real-time geometry estimation with appearance-based object detection. We demonstrate how those two components can benefit from each other’s con- tinuous input and how the transferred knowledge can be used to improve scene analysis. Thus, scene interpretation is not left as a matter of logical reasoning, but is instead addressed by the repeated interaction and consistency checks between different levels and modes of visual processing. As our results show, the proposed tight integration significantly increases recognition performance, as well as over- all system robustness. In addition, it enables the construction of novel capabilities such as the accurate 3D estimation of object locations and orientations and their temporal integration in a world coordinate frame. The system is evaluated on a challenging real-world car detection task in an urban scenario.
Real-time Visualization of Wave Propagation
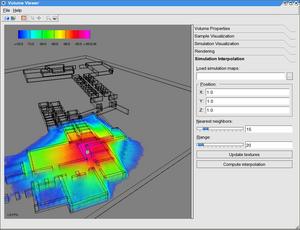
In this work we present a method to visualize the wave propagation mechanisms of wireless networks at interactive rates. The user can move around transmitting nodes and immediately sees the resulting field strength for the complete scenario. This can be used for rapid optimization of antenna placement, or for visualizing the coverage of mobile stations, as they move through a simulation. In a preprocessing step we compute the wave propagation for a distinct set of transmitter positions. Whereas in the visualization phase we use these precomputed maps to do a fast interpolation using a current graphics card.
Iterative Multi-View Plane Fitting
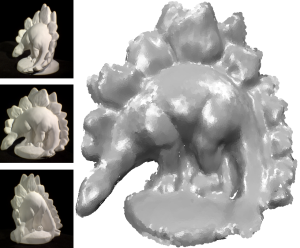
We present a method for the reconstruction of 3D planes from calibrated 2D images. Given a set of pixels Ω in a reference image, our method computes a plane which best approximates that part of the scene which has been projected to Ω by exploiting additional views. Based on classical image alignment techniques we derive linear matching equations minimally parameterized by the three parameters of an object-space plane. The resulting iterative algorithm is highly robust because it is able to integrate over large image regions due to the correct object-space approximation and hence is not limited to comparing small image patches. Our method can be applied to a pair of stereo images but is also able to take advantage of the additional information provided by an arbitrary number of input images. A thorough experimental validation shows that these properties enable robust convergence especially under the influence of image sensor noise and camera calibration errors.
Interactive Image Completion with Perspective Correction

We present an interactive system for fragment-based image completion which exploits information about the approximate 3D structure in a scene in order to estimate and apply perspective corrections when copying a source fragment to a target position. Even though implicit 3D information is used, the interaction is strictly 2D which makes the user interface very simple and intuitive. We propose different interaction metaphors in our system for providing 3D information interactively. Our search and matching procedure is done in the Fourier domain and hence it is very fast and it allows us to use large fragments and multiple source images with high resolution while still obtaining interactive response times. Our image completion technique also takes user-specified structure information into account where we generalize the concept of feature curves to arbitrary sets of feature pixels. We demonstrate our technique on a number of difficult completion tasks.
Hierarchical Volumetric Multi-view Stereo Reconstruction of Manifold Surfaces based on Dual Graph Embedding
This paper presents a new volumetric stereo algorithm to reconstruct the 3D shape of an arbitrary object. Our method is based on finding the minimum cut in an octahedral graph structure embedded into the vol umetric grid, which establishes a well defined relationship between the integrated photo-consistency function of a region in space and the corresponding edge weights of the embedded graph. This new graph structure allows for a highly efficient hierarchical implementation supporting high volumetric resolutions and large numbers of input images. Furthermore we will show how the resulting cut surface can be directly converted into a consistent, closed and manifold mesh. Hence this work provides a complete multi-view stereo reconstruction pipeline. We demonstrate the robustness and efficiency of our technique by a number of high quality reconstructions of real objects.
Robust and Efficient Photo-Consistency Estimation for Volumetric 3D Reconstruction
Estimating photo-consistency is one of the most important ingredients for any 3D stereo reconstruction technique that is based on a volumetric scene representation. This paper presents a new, illumination invariant photo-consistency measure for high quality, volumetric 3D reconstruction from calibrated images. In contrast to current standard methods such as normalized cross-correlation it supports unconstrained camera setups and non-planar surface approximations. We show how this measure can be embedded into a highly efficient, completely hardware accelerated volumetric reconstruction pipeline by exploiting current graphics processors. We provide examples of high quality reconstructions with computation times of only a few seconds to minutes, even for large numbers of cameras and high volumetric resolutions.
Extracting consistent and manifold interfaces from multi-valued volume data sets
We propose an algorithm to construct a set of interfaces that separate the connected components of a multi-valued volume dataset. While each single interface is a manifold triangle mesh, two or more interfaces may join consistently along their common boundaries, i.e. there are no T-junctions or gaps. In contrast to previous work, our algorithm classifies and removes the topological ambiguities from the volume before extracting the interfaces. This not only allows for a simple and stable extraction algorithm, but also makes it possible to include user constraints.
Structure Recovery via Hybrid Variational Surface Approximation
Aiming at robust surface structure recovery, we extend the powerful optimization technique of variational shape approximation by allowing for several different primitives to represent the geometric proxy of a surface region. While the original paper only considered planes, we also include spheres, cylinders, and more complex rollingball blend patches. The motivation for this choice is the fact that most technical CAD objects consist of patches from these four categories. The robust segmentation and global optimization properties which have been observed for the variational shape approximation carry over to our hybrid extension. Hence, we can use our algorithm to segment a given mesh model into characteristic patches and provide a corresponding geometric proxy for each patch. The expected result that we recover surface structures more robustly and thus obtain better approximations with a smaller number of primitives, is validated and demonstrated on a number of examples.
Automatic Generation of Structure Preserving Multiresolution Models
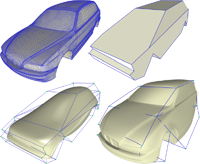
We are proposing a multiresolution representation which uses a subdivision surface as a smooth base surface with respect to which a high resolution mesh is defined by normal displacement. While this basic representation is quite straightforward, our actual contribution lies in the automatic generation of such a representation. Given a high resolution mesh, our algorithm is designed to derive a subdivision control mesh whose structure is properly adjusted and aligned to the major geometric features. This implies that the control vertices of the subdivision surface not only control globally smooth deformations but in addition that these deformations are meaningful in the sense that their support and shape correspond to the characteristic structure of the input mesh. This is achieved by using a new decimation scheme for general polygonal meshes (not just triangles) that is based on face merging instead of edge collapsing. A face-based integral metric makes the decimation scheme very robust such that we can obtain extremely coarse control meshes which in turn allow for deformations with large support.
Structure Preserving CAD Model Repair
There are two major approaches for converting a tessellated CAD model that contains inconsistencies like cracks or intersections into a manifold and closed triangle mesh. Surface oriented algorithms try to fix the inconsistencies by perturbing the input only slightly, but they often cannot handle special cases. Volumetric algorithms on the other hand produce guaranteed manifold meshes but mostly destroy the structure of the input tessellation due to global resampling. In this paper we combine the advantages of both approaches: We exploit the topological simplicity of a voxel grid to reconstruct a cleaned up surface in the vicinity of intersections and cracks, but keep the input tessellation in regions that are away from these inconsistencies. We are thus able to preserve any characteristic structure (i.e. iso-parameter or curvature lines) that might be present in the input tessellation. Our algorithm closes gaps up to a user-defined maximum diameter, resolves intersections, handles incompatible patch orientations and produces a feature-sensitive, manifold output that stays within a prescribed error-tolerance to the input model.
Real-Time Shape Editing using Radial Basis Functions
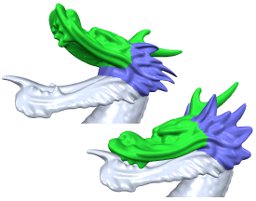
Current surface-based methods for interactive freeform editing of high resolution 3D models are very powerful, but at the same time require a certain minimum tessellation or sampling quality in order to guarantee sufficient robustness. In contrast to this, space deformation techniques do not depend on the underlying surface representation and hence are affected neither by its complexity nor by its quality aspects. However, while analogously to surface-based methods high quality deformations can be derived from variational optimization, the major drawback lies in the computation and evaluation, which is considerably more expensive for volumetric space deformations. In this paper we present techniques which allow us to use triharmonic radial basis functions for real-time freeform shape editing. An incremental least-squares method enables us to approximately solve the involved linear systems in a robust and efficient manner and by precomputing a special set of deformation basis functions we are able to significantly reduce the per-frame costs. Moreover, evaluating these linear basis functions on the GPU finally allows us to deform highly complex polygon meshes or point-based models at a rate of 30M vertices or 13M splats per second, respectively.
High-Quality Surface Splatting on Today's GPUs
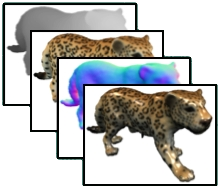
Because of their conceptual simplicity and superior flexibility, point-based geometries evolved into a valuable alternative to surface representations based on polygonal meshes. Elliptical surface splats were shown to allow for high-quality anti-aliased rendering by sophisticated EWA filtering. Since the publication of the original software-based EWA splatting, several authors tried to map this technique to the GPU in order to exploit hardware acceleration. Due to the lacking support for splat primitives, these methods always have to find a trade-off between rendering quality and rendering performance. In this paper, we discuss the capabilities of today's GPUs for hardware-accelerated surface splatting. We present an approach that achieves a quality comparable to the original EWA splatting at a rate of more than 20M elliptical splats per second. In contrast to previous GPU renderers, our method provides per-pixel Phong shading even for dynamically changing geometries and high-quality anti-aliasing by employing a screen-space pre-filter in addition to the object-space reconstruction filter. The use of deferred shading techniques effectively avoids unnecessary shader computations and additionally provides a clear separation between the rasterization and the shading of elliptical splats, which considerably simplifies the development of custom shaders. We demonstrate quality, efficiency, and flexibility of our approach by showing several shaders on a range of models.
Progressive Splatting

Surface splatting enables high quality and ecient rendering algorithms for dense point-sampled datasets. However, with increasing data complexity, the need for multiresolution models becomes evident. For triangle meshes, progressive or continuous level of detail hierarchies have proven to be very effective when it comes to (locally) adapt the resolution level of the 3D model to the application-dependent quality requirements. In this paper we transfer this concept to splat-based geometry representations. Our progressive splat decimation procedure uses the standard greedy approach but unlike previous work, it uses the full splat geometry in the decimation criteria and error estimates, not just the splat centers. With two improved error metrics, this new greedy framework offers better approximation quality than other progressive splat decimators. It comes even close to the recently proposed globally optimized single-resolution sub-sampling techniques while being faster by a factor of 3.
Automatic Restoration of Polygon Models
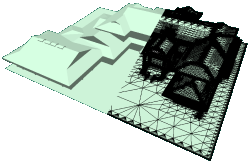
We present a fully automatic technique which converts an inconsistent input mesh into an output mesh that is guaranteed to be a clean and consistent mesh representing the closed manifold surface of a solid object. The algorithm removes all typical mesh artifacts such as degenerate triangles, incompatible face orientation, non-manifold vertices and edges, overlapping and penetrating polygons, internal redundant geometry as well as gaps and holes up to a user-defined maximum size. Moreover, the output mesh always stays within a prescribed tolerance to the input mesh. Due to the effective use of a hierarchical octree data structure, the algorithm achieves high voxel resolution (up to 4096^3 on a 2GB PC) and processing times of just a few minutes for moderately complex objects. We demonstrate our technique on various architectural CAD models to show its robustness and reliability.
Feature-based decomposition of facades
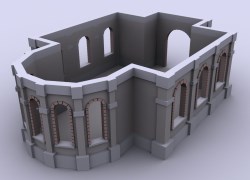
Due to advances in computer hardware, virtual environments become significantly larger and more complex. Therefore the modeling of virtual worlds, e.g. for computer animation and games becomes increasingly time and resource consuming.
In architectural settings façade features are influenced by the underlying geometrical structure or even by other façade structures, e.g. façade edges made of large stones influence the adjacent walls. To achieve an aesthetic look of the façade adjacent structures must be seamlessly aligned.
The modeling of such structures is a tedious work. With our approach only a few basic parameters are needed to create highly detailed façades. This relieves the designer of the burden of difficult modeling tasks and gives him more high level control.
In this paper we present a strategy for a floor plan representation that permits arbitrary floor plan outlines. This simplifies the roof generation for different roof types in an easy way to achieve an aesthetic goal. Based on the floor plan representation we describe a hierarchical decomposition of architectural façade features. With an order relation on it we represent the interdependencies between the façade features and introduce a geometry generator for them.
With our approach every building in a large VR city will look different but can have a high level on architectural details.
@inproceedings{finken05,
author = {Dieter Finkenzeller and Jan Bender and Alfred Schmitt},
booktitle = {Research in Interactive Design: Proceedings of Virtual Concept 2005},
editor = {Xavier Fischer and Daniel Coutellier},
title = {Feature-based decomposition of fa\c{c}ades},
publisher = {Springer},
year = {2005},
address = {Biarritz, France}
}
An impulse-based dynamic simulation system for VR applications
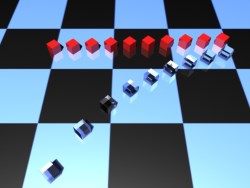
This paper describes a system for dynamic simulation of linked rigid bodies in real-time. The system was developed to simulate mechanical behaviour in VR applications. An extension for a 3D modelling tool was developed which provides the possibility to model a VR scene including the geometries and mechanical parameters of all rigid bodies and the properties of the joints between them easily. For the dynamic simulation an impulse-based method is used. The distinguishing feature of this method is that all kind of constraints are satisfied with the iterative computation of impulses. The advantage of this iterative technique is that it is fast and accurate results can be achieved. The dynamic simulation system uses efficient collision detection methods. For every collision that is detected a contact region between the objects is determined to provide an accurate collision response.
@inproceedings{Bender05,
author = {Jan Bender and Dieter Finkenzeller and Alfred Schmitt},
title = {An impulse-based dynamic simulation system for {VR} applications},
booktitle = {Proceedings of Virtual Concept 2005},
year = {2005},
publisher = {Springer},
address = {Biarritz, France}
}
Impulse-Based Dynamic Simulation of Multibody Systems: Numerical Comparison with Standard Methods
At first we will give a short introduction to the new impulse-based method for dynamic simulation. Up till now impulses were frequently used to resolve collisions between rigid bodies. In the last years we have extended these techniques to simulate constraint forces. Important properties of the new impulse method are: (1) Simulation in Cartesian coordinates, (2) complete elimination of drift as known from Lagrange multiplier methods, (3) simple integration of collision and friction and (4) real time performance even for complex multibody systems like six legged walking machines. In order to demonstrate the potential of the impulse-based method, we report on numerical experiments. We compare the following dynamic simulation methods: (1) Generalized (or reduced) coordinates, (2) Lagrange multipliers without and with several stabilization methods like Baumgarte, velocity correction and projection method, (3) impulse-based methods of order 2, 4, 6, 8, and 10. We have simulated the mathematical pendulum, the double and the triple pendulum with all of these dynamic simulation methods and report on the attainable accuracy.
@inproceedings{Schmitt05Soz,
author = "Alfred Schmitt and Jan Bender",
title = "Impulse-Based Dynamic Simulation of Multibody Systems: Numerical Comparison with Standard Methods",
year = {2005},
booktitle= {Proc. Automation of Discrete Production Engineering},
adress= {Sozopol, Bulgaria},
pages ={324--329}
}
Impulse-Based Dynamic Simulation of Higher Order and Numerical Results
First, we will provide a short introduction to the impulse-based method for dynamic simulation. Till now, impulses were frequently used to resolve collisions between rigid bodies. In the last years, we have extended these techniques to simulate constraint forces. Important properties of the new impulse method are: (1) Simulation in Cartesian coordinates, (2) complete elimination of the constraint drift known from Lagrange multiplier methods, (3) simple integration of collision and friction and (4) real-time performance even for complex multibody systems like six-legged walking machines. In order to demonstrate the potential of the impulse-based method, we report on numerical experiments. We compare the following dynamic simulation methods: (1) Generalized (or reduced) coordinates, (2) the Lagrange multiplier method with and without several stabilization methods like Baumgarte, the velocity correction and a projection method, (3) impulse-based methods of integration order 2, 4, 6, 8, and 10. We have simulated the mathematical pendulum, the double and the triple pendulum with all of these dynamic simulation methods and report on the attainable accuracy. It turned out that the impulse methods of higher integration order are all of O(h^3) but have very small factors and are therefore relatively accurate. A Lagrange multiplier method fully stabilized by impulse-based techniques turned out to be the best of the Lagrange multiplier methods tested.
@TechReport{Schmitt05_21,
author = "Alfred Schmitt and Jan Bender and Hartmut Prautzsch",
title = "Impulse-Based Dynamic Simulation of Higher Order and Numerical Results",
institution = "Institut f{\"u}r Betriebs- und Dialogsysteme",
year = "2005",
type = "Technical Report",
number = "21"
}
On the Convergence and Correctness of Impulse-Based Dynamic Simulation
Impulse-based dynamic simulation using the iterative method results in relatively simple algorithms which are easy to implement. However, two important theoretical questions have so far still remained open: (1) In what situations does the iterative procedure converge or diverge, and how can divergence be avoided? (2) Does the impulse-based simulation converge towards the exact solution of the dynamics problem as the step size is reduced? We will completely answer both questions in this paper. First we simplify the argumentation in that we prove that for every multibody system there is a dynamically and kinematically equivalent point mass system. Hence, our results on point mass systems also apply to multibody simulations. Next we show how to replace the iterative procedures by solving systems of linear equations. We prove that the matrices of these equation systems are non-singular if redundant constraints are removed from the point mass system in question. We prove further that the solution generated by the impulse-based procedure converges towards the exact solution of the dynamics problem as the step size is reduced towards zero. The proof is based on a detailed comparison of the impulse-based integration expression and the Taylor series solution. It is well known that the latter converges to the exact solution of the dynamics problem if a Lipschitz condition is satisfied.
Comparison with the standard numerics on the basis of Lagrange multipliers shows significant advantages for the impulse-based method because the latter is completely free of drift problems, and stabilizations in the sense of Baumgarte are unnecessary. Because of the existence of methods of higher order, we can finally conclude that the impulse-based method is superior to the method with Lagrange multipliers.
@TechReport{Schmitt05_17,
author = "Alfred Schmitt and Jan Bender and Hartmut Prautzsch",
title = "On the Convergence and Correctness of Impulse-Based Dynamic Simulation",
institution = "University of Karlsruhe",
year = "2005",
type = "Technical Report",
number = "17"
}
Pedestrian Detection in Crowded Scenes
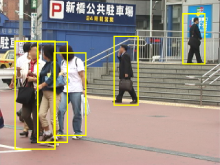
In this paper, we address the problem of detecting pedestrians in crowded real-world scenes with severe overlaps. Our basic premise is that this problem is too difficult for any type of model or feature alone. Instead, we present a novel algorithm that integrates evidence in multiple iterations and from different sources. The core part of our method is the combination of local and global cues via a probabilistic top-down segmentation. Altogether, this approach allows to examine and compare object hypotheses with high precision down to the pixel level. Qualitative and quantitative results on a large data set confirm that our method is able to reliably detect pedestrians in crowded scenes, even when they overlap and partially occlude each other. In addition, the flexible nature of our approach allows it to operate on very small training sets.
An Evaluation of Local Shape-Based Features for Pedestrian Detection
Pedestrian detection in real world scenes is a challenging problem. In recent years a variety of approaches have been proposed, and impressive results have been reported on a variety of databases. This paper systematically evaluates (1) various local shape descriptors, namely Shape Context and Local Chamfer descriptor and (2) four different interest point detectors for the detection of pedestrians. Those results are compared to the standard global Chamfer matching approach. A main result of the paper is that Shape Context trained on real edge images rather than on clean pedestrian silhouettes combined with the Hessian-Laplace detector outperforms all other tested approaches.
Local Features for Object Class Recognition

In this paper we compare the performance of local detectors and descriptors in the context of object class recognition. Recently, many detectors / descriptors have been evaluated in the context of matching as well as invariance to viewpoint changes [20]. However, it is unclear if these results can be generalized to categorization problems, which require different properties of features. We evaluate 5 stateof-the-art scale invariant region detectors and 5 descriptors. Local features are computed for 20 object classes and clustered using hierarchical agglomerative clustering. We measure the quality of appearance clusters and location distributions using entropy as well as precision. We also measure how the clusters generalize from training set to novel test data. Our results indicate that extended SIFT descriptors [22] computed on Hessian-Laplace [20] regions perform best. Second score is obtained by Salient regions [11]. The results also show that these two detectors provide complementary features. The new detectors/descriptors significantly improve the performance of a state-of-the art recognition approach [16] in pedestrian detection task.
Integrating Representative and Discriminant Models for Object Category Detection
Category detection is a lively area of research. While categorization algorithms tend to agree in using local descriptors, they differ in the choice of the classifier, with some using generative models and others discriminative approaches. This paper presents a method for object category detection which integrates a generative model with a discriminative classifier. For each object category, we generate an appearance codebook, which becomes a common vocabulary for the generative and discriminative methods. Given a query image, the generative part of the algorithm finds a set of hypotheses and estimates their support in location and scale. Then, the discriminative part verifies each hypothesis on the same codebook activations. The new algorithm exploits the strengths of both original methods, minimizing their weaknesses. Experiments on several databases show that our new approach performs better than its building blocks taken separately. Moreover, experiments on two challenging multi-scale databases show that our new algorithm outperforms previously reported results.
Optimization Methods for Scattered Data Approximation with Subdivision Surfaces
We present a method for scattered data approximation with subdivision surfaces which actually uses the true representation of the limit surface as a linear combination of smooth basis functions associated with the control vertices. A robust and fast algorithm for exact closest point search on Loop surfaces which combines Newton iteration and non-linear minimization is used for parameterizing the samples. Based on this we perform unconditionally convergent parameter correction to optimize the approximation with respect to the L2 metric and thus we make a well-established scattered data fitting technique which has been available before only for B-spline surfaces, applicable to subdivision surfaces. We also adapt the recently discovered local second order squared distance function approximant to the parameter correction setup. Further we exploit the fact that the control mesh of a subdivision surface can have arbitrary connectivity to reduce the L? error up to a certain user-defined tolerance by adaptively restructuring the control mesh. Combining the presented algorithms we describe a complete procedure which is able to produce high-quality approximations of complex, detailed models.
Efficient Spectral Watermarking of Large Meshes with Orthogonal Basis Functions

Allowing for copyright protection and ownership assertion, digital watermarking techniques, which have been successfully applied for classical media types like audio, images and videos, have recently been adapted for the newly emerged multimedia data type of 3D geometry models. In particular, the widely used spread-spectrum methods can be generalized for 3D datasets by transforming the original model to a frequency domain and perturbing the coefficients of the most dominant basis functions. Previous approaches employing this kind of spectral watermarking are mainly based on multiresolution mesh analysis, wavelet domain transformation or spectral mesh analysis. Though they already exhibit good resistance to many types of real-world attacks, they are often far too slow to cope with very large meshes due to their complicated numerical computations. In this paper, we present a novel spectral watermarking scheme using new orthogonal basis functions based on radial basis functions. With our proposed fast basis function orthogonalization, while observing similar persistence with respect to various attacks as other related approaches, our scheme runs faster by two orders of magnitude and thus can efficiently watermark very large models.
Geometrically Controlled 4-Point Interpolatory Schemes
We present several non-linear 4-point interpolatory schemes, derived from the "classical" linear 4-point scheme. These new schemes have variable tension parameter instead of the fixed tension parameter in the linear 4-point scheme. The tension parameter is adapted locally according to the geometry of the control polygon within the 4-point stencil. This allows the schemes to remain local and in the same time to achieve two important shape-preserving properties - artifacts elimination and convexity-preservation. The proposed schemes are robust and have special features such as "double-knot" edges corresponding to continuity without geometrical smoothness and inflection edges support for convexity-preservation. Convergence proof is given and experimental smoothness analysis is done in detail, which indicates that the limit curves are C^1.
Self-Calibrating Optical Motion Tracking for Articulated Bodies
Building intuitive user-interfaces for Virtual Reality applications is a difficult task, as one of the main purposes is to provide a ''natural'', yet efficient input device to interact with the virtual environment. One particularly interesting approach is to track and retarget the complete motion of a subject. Established techniques for full body motion capture like optical motion tracking exist. However, due to their computational complexity and their reliance on pre-specified models, they fail to meet the demanding requirements of Virtual Reality environments such as real-time response, immersion, and ad hoc configurability. Our goal is to support the use of motion capture as a general input device for Virtual Reality applications. In this paper we present a self-calibrating framework for optical motion capture, enabling the reconstruction and tracking of arbitrary articulated objects in real-time. Our method automatically estimates all relevant model parameters on-the-fly without any information on the initial tracking setup or the marker distribution, and computes the geometry and topology of multiple tracked skeletons. Moreover, we show how the model can make the motion capture phase robust against marker occlusions by exploiting the redundancy in the skeleton model and by reconstructing missing inner limbs and joints of the subject from partial information. Meeting the above requirements our system is well applicable to a wide range of Virtual Reality based applications, where unconstrained tracking and flexible retargeting of motion data is desirable.
Snakes on triangle meshes
In this work we introduce a new method for representing and evolving snakes that are constrained to lie on a prescribed surface (triangle mesh). The new representation allows to automatically adapt the snake resolution to the surface tesselation and does not need any (unstable) back-projection operations. Furthermore, it enables efficient and robust collision detection and gives us complete control on the topological behaviour of the snakes, i.e. snakes may split or merge depending on the intended task. Possible applications include enhanced mesh scissoring operations and the detection of constrictions of a surface.
Efficient Linear System Solvers for Mesh Processing
Mario Botsch, David Bommes, Leif Kobbelt
The use of polygonal mesh representations for freeform geometry enables the formulation of many important geometry processing tasks as the solution of one or several linear systems. As a consequence, the key ingredient for efficient algorithms is a fast procedure to solve linear systems. A large class of standard problems can further be shown to lead more specifically to sparse, symmetric, and positive definite systems, that allow for a numerically robust and efficient solution. In this paper we discuss and evaluate the use of \emph{sparse direct solvers} for such kind of systems in geometry processing applications, since in our experiments they turned out to be superior even to highly optimized multigrid methods, but at the same time were considerably easier to use and implement. Although the methods we present are well known in the field of high performance computing, we observed that they are in practice surprisingly rarely applied to geometry processing problems.
Point-Sampled Shape Representations

An Intuitive Framework for Real-Time Freeform Modeling
We present a freeform modeling framework for unstructured triangle meshes which is based on constraint shape optimization. The goal is to simplify the user interaction even for quite complex freeform or multiresolution modifications. The user first sets various boundary constraints to define a custom tailored (abstract) basis function which is adjusted to a given design task. The actual modification is then controlled by moving one single 9-dof manipulator object. The technique can handle arbitrary support regions and piecewise boundary conditions with smoothness ranging continuously from C0 to C2. To more naturally adapt the modification to the shape of the support region, the deformed surface can be tuned to bend with anisotropic stiffness. We are able to achieve real-time response in an interactive design session even for complex meshes by precomputing a set of scalar-valued basis functions that correspond to the degrees of freedom of the manipulator by which the user controls the modification.
Optimized Sub-Sampling of Point Sets for Surface Splatting
Using surface splats as a rendering primitive has gained increasing attention recently due to its potential for high-performance and high-quality rendering of complex geometric models. However, as with any other rendering primitive, the processing costs are still proportional to the number of primitives that we use to represent a given object. This is why complexity reduction for point-sampled geometry is as important as it is, e.g., for triangle meshes. In this paper we present a new sub-sampling technique for dense point clouds which is speccally adjusted to the particular geometric properties of circular or elliptical surface splats. A global optimization scheme computes an approximately minimal set of splats that covers the entire surface while staying below a globally prescribed maximum error tolerance e. Since our algorithm converts pure point sample data into surface splats with normal vectors and spatial extent, it can also be considered as a surface reconstruction technique which generates a hole-free piecewise linear C^(-1) continuous approximation of the input data. Here we can exploit the higher flexibility of surface splats compared to triangle meshes. Compared to previous work in this area we are able to obtain significantly lower splat numbers for a given error tolerance.
Best student paper award!
HW3D: A tool for interactive real-time 3D visualization in GIS supported flood modelling
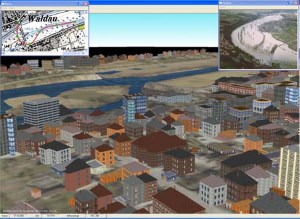
Large numerical calculations are made to get a prediction what damage a possible flood would cause. These results of the simulation are used to prevent further flood catastrophes. The more realistic a visualization of these calculations is the more precaution will be taken by the local authority and the citizens. This paper describes a tool and techniques to get a realistic looking, three-dimensional, easy to use, realtime visualization despite of the huge amount of data given from the flood simulation process.
@inproceedings{bender04,
author = {Jan Bender and Dieter Finkenzeller and Peter Oel},
title = {HW3D: A tool for interactive real-time 3D visualization in GIS supported flood modelling},
booktitle = {Proceedings of the 17th international conference on computer animation and social agents},
year = {2004},
address = {Geneva (Switzerland)},
pages = {305-314}
}
Optimization Techniques for Approximation with Subdivision Surfaces
We present a method for scattered data approximation with subdivision surfaces which actually uses the true representation of the limit surface as a linear combination of smooth basis functions associated with the control vertices. This is unlike previous techniques which used only piecewise linear approximations of the limit surface. By this we can assign arbitrary parameterizations to the given sample points, including those generated by parameter correction. We present a robust and fast algorithm for exact closest point search on Loop surfaces by combining Newton iteration and non-linear minimization. Based on this we perform unconditionally convergent parameter correction to optimize the approximation with respect to the L^2 metric and thus we make a well-established scattered data fitting technique which has been available before only for B-spline surfaces, applicable to subdivision surfaces. Further we exploit the fact that the control mesh of a subdivision surface can have arbitrary connectivity to reduce the L^\infty error up to a certain user-defined tolerance by adaptively restructuring the control mesh. By employing iterative least squares solvers, we achieve acceptable running times even for large amounts of data and we obtain high quality approximations by surfaces with relatively low control mesh complexity compared to the number of sample points. Since we are using plain subdivision surfaces, there is no need for multiresolution detail coefficients and we do not have to deal with the additional overhead in data and computational complexity associated with them.
Combined Object Categorization and Segmentation with an Implicit Shape Model
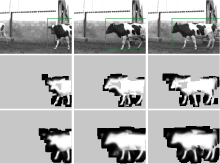
We present a method for object categorization in real-world scenes. Following a common consensus in the field, we do not assume that a figureground segmentation is available prior to recognition. However, in contrast to most standard approaches for object class recognition, our approach automatically segments the object as a result of the categorization. This combination of recognition and segmentation into one process is made possible by our use of an Implicit Shape Model, which integrates both into a common probabilistic framework. In addition to the recognition and segmentation result, it also generates a per-pixel confidence measure specifying the area that supports a hypothesis and how much it can be trusted. We use this confidence to derive a natural extension of the approach to handle multiple objects in a scene and resolve ambiguities between overlapping hypotheses with a novel MDL-based criterion. In addition, we present an extensive evaluation of our method on a standard dataset for car detection and compare its performance to existing methods from the literature. Our results show that the proposed method significantly outperforms previously published methods while needing one order of magnitude less training examples. Finally, we present results for articulated objects, which show that the proposed method can categorize and segment unfamiliar objects in different articulations and with widely varying texture patterns, even under significant partial occlusion.
Scale Invariant Object Categorization Using a Scale-Adaptive Mean-Shift Search
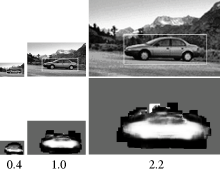
The goal of our work is object categorization in real-world scenes. That is, given a novel image we want to recognize and localize unseen-before objects based on their similarity to a learned object category. For use in a realworld system, it is important that this includes the ability to recognize objects at multiple scales. In this paper, we present an approach to multi-scale object categorization using scale-invariant interest points and a scale-adaptive Mean-Shift search. The approach builds on the method from [12], which has been demonstrated to achieve excellent results for the single-scale case, and extends it to multiple scales. We present an experimental comparison of the influence of different interest point operators and quantitatively show the method’s robustness to large scale changes.
Awarded the main prize of the German Pattern Recognition Society (DAGM Best Paper Award)
Interleaved Object Categorization and Segmentation
This thesis is concerned with the problem of visual object categorization, that is of recognizing unseen-before objects, localizing them in cluttered real-world images, and assigning the correct category label. This capability is one of the core competencies of the human visual system. Yet, computer vision systems are still far from reaching a comparable level of performance. Moreover, computer vision research has in the past mainly focused on the simpler and more specific problem of identifying known objects under novel viewing conditions. The visual categorization problem is closely linked to the task of figure-ground segmentation, that is of dividing the image into an object and a non-object part. Historically, figure-ground segmentation has often been seen as an important and even necessary preprocessing step for object recognition. However, purely bottomup approaches have so far been unable to yield segmentations of sufficient quality, so that most current recognition approaches have been designed to work independently from segmentation. In contrast, this thesis considers object categorization and figure-ground segmentation as two interleaved processes that closely collaborate towards a common goal. The core part of our work is a probabilistic formulation which integrates both capabilities into a common framework. As shown in our experiments, the tight coupling between those two processes allows them to profit from each other and improve their individual performances. The resulting approach can detect categorical objects in novel images and automatically compute a segmentation for them. This segmentation is then used to again improve recognition by allowing the system to focus its effort on object pixels and discard misleading influences from the background. In addition to improving the recognition performance for individual hypotheses, the top-down segmentation also allows to determine exactly from where a hypothesis draws its support. We use this information to design a hypothesis verification stage based on the MDL principle that resolves ambiguities between overlapping hypotheses on a per-pixel level and factors out the effects of partial occlusion. Altogether, this procedure constitutes a novel mechanism in object detection that allows to analyze scenes containing multiple objects in a principled manner. Our results show that it presents an improvement over conventional criteria based on bounding box overlap and permits more accurate acceptance decisions. Our approach is based on a highly flexible implicit representation for object shape that can combine the information of local parts observed on different training examples and interpolate between the corresponding objects. As a result, the proposed method can learn object models already from few training examples and achieve competitive object detection performance with training sets that are between one and two orders of magnitude smaller than those used in comparable systems. An extensive evaluation on several large data sets shows that the system is applicable to many different object categories, including both rigid and articulated objects.
Teaching meshes, subdivision and multiresolution techniques
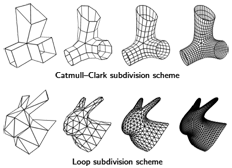
In recent years, geometry processing algorithms that directly operate on polygonal meshes have become an indispensable tool in computer graphics, CAD/CAM applications, numerical simulations, and medical imaging. Because the demand for people that are specialized in these techniques increases steadily the topic is finding its way into the standard curricula of related lectures on computer graphics and geometric modeling and is often the subject of seminars and presentations. In this article we suggest a toolbox to educators who are planning to set up a lecture or talk about geometry processing for a specific audience. For this we propose a set of teaching blocks, each of which covers a specific subtopic. These teaching blocks can be assembled so as to fit different occasions like lectures, courses, seminars and talks and different audiences like students and industrial practitioners. We also provide examples that can be used to deepen the subject matter and give references to the most relevant work.
Direct Anisotropic Quad-Dominant Remeshing
We present an extension of the anisotropic polygonal remeshing technique developed by Alliez et al. Our algorithm does not rely on a global parameterization of the mesh and therefore is applicable to arbitrary genus surfaces. We show how to exploit the structure of the original mesh in order to perform efficiently the proximity queries required in the line integration phase, thus improving dramatically the scalability and the performance of the original algorithm. Finally, we propose a novel technique for producing conforming quad-dominant meshes in isotropic regions as well by propagating directional information from the anisotropic regions.
A Remeshing Approach to Multiresolution Modeling
Providing a thorough mathematical foundation, multiresolution modeling is the standard approach for global surface deformations that preserve fine surface details in an intuitive and plausible manner. A given shape is decomposed into a smooth low-frequency base surface and high-frequency detail information. Adding these details back onto a deformed version of the base surface results in the desired modification. Using a suitable detail encoding, the connectivity of the base surface is not restricted to be the same as that of the original surface. We propose to exploit this degree of freedom to improve both robustness and efficiency of multiresolution shape editing. In several approaches the modified base surface is computed by solving a linear system of discretized Laplacians. By remeshing the base surface such that the Voronoi areas of its vertices are equalized, we turn the unsymmetric surface-related linear system into a symmetric one, such that simpler, more robust, and more efficient solvers can be applied. The high regularity of the remeshed base surface further removes numerical problems caused by mesh degeneracies and results in a better discretization of the Laplacian operator. The remeshing is performed on the low-frequency base surface only, while the connectivity of the original surface is kept fixed. Hence, this functionality can be encapsulated inside a multiresolution kernel and is thus completely hidden from the user.
Phong Splatting

Surface splatting has developed into a valuable alternative to triangle meshes when it comes to rendering of highly detailed massive datasets. However, even highly accurate splat approximations of the given geometry may sometimes not provide a sufficient rendering quality since surface lighting mostly depends on normal vectors whose deviation is not bounded by the Hausdorff approximation error. Moreover, current point-based rendering systems usually associate a constant normal vector with each splat, leading to rendering results which are comparable to flat or Gouraud shading for polygon meshes. In contrast, we propose to base the lighting of a splat on a linearly varying normal field associated with it, and we show that the resulting Phong Splats provide a visual quality which is far superior to existing approaches. We present a simple and effective way to construct a Phong splat representation for a given set of input samples. Our surface splatting system is implemented completely based on vertex and pixel shaders of current GPUs and achieves a splat rate of up to 4M Phong shaded, filtered, and blended splats per second. In contrast to previous work, our scan conversion is projectively correct per pixel, leading to more accurate visualization and clipping at sharp features.
Perspective Accurate Splatting
We present a novel algorithm for accurate, high quality point rendering, which is based on the formulation of the splatting process using homogeneous coordinates. In contrast to previous methods, this leads to perspective correct splat shapes, avoiding artifacts such as holes due to the approximation of the perspective projection. Further, our algorithm implements the EWA resampling filter, hence providing high image quality with anisotropic texture filtering. We also present an extension of our rendering primitive that allows the display of sharp edges and corners. Finally, we describe an efficient implementation of the algorithm based on vertex and fragment programs of current GPUs.
Survey of Point-Based Techniques in Computer Graphics
In recent years point-based geometry has gained increasing attention as an alternative surface representation, both for efficient rendering and for flexible geometry processing of highly complex 3D-models. Point sampled objects do neither have to store nor to maintain globally consistent topological information. Therefore they are more flexible compared to triangle meshes when it comes to handling highly complex or dynamically changing shapes. In this paper, we make an attempt to give an overview of the various point-based methods that have been proposed over the last years. In particular we review and evaluate different shape representations, geometric algorithms, and rendering methods which use points as a universal graphics primitive.
Parameterization-free active contour models
We present a novel approach for representing and evolving deformable active contours by restricting the movement of the contour vertices to the grid-lines of a uniform lattice. This restriction implicitly controls the (re-) parameterization of the contour and hence makes it possible to employ parameterization independent evolution rules. Moreover, the underlying uniform grid makes self-collision detection very efficient. Our contour model is also able to perform topology changes but - more importantly - it can detect and handle self-collisions at sub-pixel precision. In applications where topology changes are not appropriate we generate contours that touch themselves without any gaps or self-intersections.
Subdivision Scheme Tuning Around Extraordinary Vertices
In this paper we extend the standard method to derive and optimize subdivision rules in the vicinity of extraordinary vertices (EV). Starting from a given set of rules for regular control meshes, we tune the extraordinary rules (ER) such that the necessary conditions for C1 continuity are satisfied along with as many necessary C2 conditions as possible. As usually done, our approach sets up the general configuration around an EV by exploiting rotational symmetry and reformulating the subdivision rules in terms of the subdivision matrix' eigencomponents. The degrees of freedom are then successively eliminated by imposing new constraints which allows us, e.g., to improve the curvature behavior around EVs. The method is flexible enough to simultaneously optimize several subdivision rules, i.e. not only the one for the EV itself but also the rules for its direct neighbors. Moreover it allows us to prescribe the stencils for the ERs and naturally blends them with the regular rules that are applied away from the EV. All the constraints are combined in an optimization scheme that searches in the space of feasible subdivision schemes for a candidate which satisfies some necessary conditions exactly and other conditions approximately. The relative weighting of the constraints allows us to tune the properties of the subdivision scheme according to application specific requirements. We demonstrate our method by tuning the ERs for the well-known Loop scheme and by deriving ERs for a \sqrt{3}-type scheme based on a 6-direction Box-spline.
View-Dependent Streaming of Progressive Meshes
Multiresolution geometry streaming has been well studied in recent years. The client can progressively visualize a triangle mesh from the coarsest resolution to the finest one while a server successively transmits detail information. However, the streaming order of the detail data usually depends only on the geometric importance, since basically a mesh simplification process is performed backwards in the streaming. Consequently, the resolution of the model changes globally during streaming even if the client does not want to download detail information for the invisible parts from a given view point. In this paper, we introduce a novel framework for view-dependent streaming of multiresolution meshes. The transmission order of the detail data can be adjusted dynamically according to the visual importance with respect to the client's current view point. By adapting the truly selective refinement scheme for progressive meshes, our framework provides efficient view-dependent streaming that minimizes memory cost and network communication overhead. Furthermore, we reduce the per-client session data on the server side by using a special data structu re for encoding which vertices have already been transmitted to each client. Experimental results indicate that our framework is efficient enough for a broadcast scenario where one server streams geometry data to multiple clients with different view points.
GPU-based Tolerance Volumes for Mesh Processing
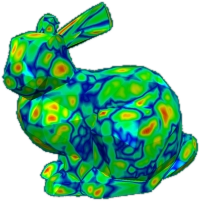
In an increasing number of applications triangle meshes represent a flexible and efficient alternative to traditional NURBS-based surface representations. Especially in engineering applications it is crucial to guarantee that a prescribed approximation tolerance to a given reference geometry is respected for any combination of geometric algorithms that are applied when processing a triangle mesh. We propose a simple and generic method for computing the distance of a given polygonal mesh to the reference surface, based on a linear approximation of its signed distance field. Exploiting the hardware acceleration of modern GPUs allows us to perform up to 3M triangle checks per second, enabling real-time distance evaluations even for complex geometries. An additional feature of our approach is the accurate high-quality distance visualization of dynamically changing meshes at a rate of 15M triangles per second. Due to its generality, the presented approach can be used to enhance any mesh processing method by global error control, guaranteeing the resulting mesh to stay within a prescribed error tolerance. The application examples that we present include mesh decimation, mesh smoothing and freeform mesh deformation.
Topologically Correct Extraction of the Cortical Surface of a Brain Using Level-Set Methods
In this paper we present a level-set framework for accurate and efficient extraction of the surface of a brain from MRI data. To prevent the so-called partial volume effect we use a topology preserving model that ensures the correct topology of the surface at all times during the reconstruction process. We also describe improvements that enhance its stability, accuracy and efficiency. The resulting reconstruction can then be used in downstream applications where we in particular focus on the problem of accurately measuring geodesic distances on the surface.
Shape Modeling with Point-Sampled Geometry
We present a versatile and complete free-form shape modeling framework for point-sampled geometry. By combining unstructured point clouds with the implicit surface definition of the moving least squares approximation, we obtain a hybrid geometry representation that allows us to exploit the advantages of implicit and parametric surface models. Based on this representation we introduce a shape modeling system that enables the designer to perform large constrained deformations as well as boolean operations on arbitrarily shaped objects. Due to minimum consistency requirements, point-sampled surfaces can easily be re-structured on the fly to support extreme geometric deformations during interactive editing. In addition, we show that strict topology control is possible and sharp features can be generated and preserved on point-sampled objects. We demonstrate the effectiveness of our system on a large set of input models, including noisy range scans, irregular point clouds, and sparsely as well as densely sampled models.
Freeform Shape Representations for Efficient Geometry Processing

The most important data structures for handling and storage of free form shapes in geometry processing applications and computer graphics can be classified according to the dimensionality of their basic structural elements: point-sets, polygon meshes, as well as volumetric representations are well established concepts to describe the shape of arbitrarily complex objects. On the other hand, algorithms to process a given geometric object can be classified according to the dominant access operation which can be of the type evaluation (sampling), query (e.g. inside/outside tests), or modification (of the geometry or the topology). On a more abstract level, we can in principle distinguish between unstructured geometry representations which do not imply any global regularity and uniformly structured representations or even hierarchically structured representations. All these different types of shape representations will be presented in this talk and the respective strengths and disadvantages will be discussed in detail. For a given application we can analyse which types of access operations are the most critial ones and then design a custom data structure according to the usage profile. In some cases it turns out that a proper combination of two different representations provides the optimal performance or robustness. We will present a couple of important geometry processing problems such as topology control for deforming implicit surfaces, mesh decimation and smoothing with global error control, and mesh restoration where this combination of geometry data representations leads to superior algorithms compared to the standard approaches.
Sub-Voxel Topology Control for Level Set Surfaces
Active contour models are an efficient, accurate, and robust tool for the segmentation of 2D and 3D image data. In particular, geometric deformable models (GDM) that represent an active contour as the level set of an implicit function have proven to be very effective. GDMs, however, do not provide any topology control, i.e. contours may merge or split arbitrarily and hence change the genus of the reconstructed surface. This behavior is inadequate in settings like the segmentation of organic tissue or other objects whose genus is known beforehand. In this paper we describe a novel method to overcome this limitation while still preserving the favorable properties of the GDM setup. We achieve this by adding (sparse) topological information to the volume representation at locations where it is necessary to locally resolve topological ambiguities. Since the sparse topology information is attached to the edges of the voxel grid, we can reconstruct the interfaces where the deformable surface touches itself at sub-voxel accuracy. We also demonstrate the efficiency and robustness of our method on synthetic as well as on real (MRT) scan data.
Multiresolution Surface Representation Based on Displacement Volumes

We propose a new representation for multiresolution models which uses volume elements enclosed between the different resolution levels to encode the detail information. Keeping these displacement volumes locally constant during a deformation of the base surface leads to a natural behaviour of the detail features. The corresponding reconstruction operator can be implemented efficiently by a hierarchical iterative relaxation scheme, providing close to interactive response times for moderately complex models. Based on this representation we implement a multiresolution editing tool for irregular polygon meshes that allows the designer to freely edit the base surface of a multiresolution model without having to care about self-intersections in the respective detailed surface. We demonstrate the effectiveness and robustness of the reconstruction by several examples with real-world data.
Ein neues Verfahren für die mechanische Simulation in VR-Systemen und in der Robotik
Für die mechanische Simulation von Robotern wurde ein neues Verfahren entwickelt. Dieses verwendet zur Lösung der Bewegungsgleichungen für gelenkgekoppelte Starrkörpersysteme kein Numerik-Verfahren wie z. B. Runge-Kutta, sondern basiert auf einer neuartigen Impulstechnik. Bei entsprechender Wahl der Parameter erlaubt das Verfahren hohe Genauigkeit und insbesondere sehr gute Energieerhaltung. Andererseits kann der Rechenzeitbedarf in kritischen Realzeitsituationen extrem reduziert werden, wenn die Parameter entsprechend angepasst werden. Dabei erweist sich das Verfahren als außerordentlich stabil und führt praktisch nie zur Desintegration der mechanischen Modelle. Deswegen ist dieses neue Simulationsverfahren speziell für Implementierungen in VRSystemen und für die Simulation komplexer, mechatronischer Systeme wie z. B. humanoider Roboter geeignet.
@inproceedings{Bender03,
author = {Jan Bender and Matthias Baas and Alfred Schmitt},
title = {Ein neues Verfahren für die mechanische Simulation in VR-Systemen und in der Robotik},
booktitle = {17. Symposium Simulationstechnik, ASIM 2003},
year = {2003},
pages = {111-116},
}
Analyzing Contour and Appearance Based Methods for Object Categorization

Object recognition has reached a level where we can identify a large number of previously seen and known objects. However, the more challenging and important task of categorizing previously unseen objects remains largely unsolved. Traditionally, contour and shape based methods are regarded most adequate for handling the generalization requirements needed for this task. Appearance based methods, on the other hand, have been successful in object identification and detection scenarios. Today little work is done to systematically compare existing methods and characterize their relative capabilities for categorizing objects. In order to compare different methods we present a new database specifically tailored to the task of object categorization. It contains high-resolution color images of 80 objects from 8 different categories, for a total of 3280 images. It is used to analyze the performance of several appearance and contour based methods. The best categorization result is obtained by an appropriate combination of different methods.
On-line Face Tracking Using a Feature-Driven Level Set
An efficient and general framework for the incorporation of statistical prior information, based on a wide variety of detectable point features, into level set based object tracking is presented. Level set evolution is based on the maximisation of a set of likelihoods on mesh values at features, which are located using a stochastic sampling process. This evolution is based on the interpolation of likelihood gradients using kernels centred at the features. Feature detectors implemented are based on moments of colour histogram segmented images and learned image patches located using normalised correlation, although a wide variety of feature detectors could be used. A computationally efficient level set implementation is presented along with a method for the incorporation of a motion model into the scheme.
Interleaved Object Categorization and Segmentation
Historically, figure-ground segmentation has been seen as an important and even necessary precursor for object recognition. In that context, segmentation is mostly defined as a data driven, that is bottom-up, process. As for humans object recognition and segmentation are heavily intertwined processes, it has been argued that top-down knowledge from object recognition can and should be used for guiding the segmentation process. In this paper, we present a method for the categorization of unfamiliar objects in difficult real-world scenes. The method generates object hypotheses without prior segmentation that can be used to obtain a category-specific figure-ground segmentation. In particular, the proposed approach uses a probabilistic formulation to incorporate knowledge about the recognized category as well as the supporting information in the image to segment the object from the background. This segmentation can then be used for hypothesis verification, to further improve recognition performance. Experimental results show the capacity of the approach to categorize and segment object categories as diverse as cars and cows.
Piecewise Linear Approximation of Signed Distance Fields
The signed distance field of a surface can effectively support many geometry processing tasks such as decimation, smoothing, and Boolean operations since it provides efficient access to distance (error) estimates. In this paper we present an algorithm to compute a piecewise linear, not necessarily continuous approximation of the signed distance field for a given object. Our approach is based on an adaptive hierarchical space partition that stores a linear distance function in every leaf node. We provide positive and negative criteria for selecting the splitting planes. Consequently the algorithm adapts the leaf cells of the space partition to the geometric shape of the underlying model better than previous methods. This results in a hierarchical representation with comparably low memory consumption and which allows for fast evaluation of the distance field function.
High-Quality Point-Based Rendering on Modern GPUs

In the last years point-based rendering has been shown to offer the potential to outperform traditional triangle based rendering both in speed and visual quality when it comes to processing highly complex models. Existing surface splatting techniques achieve superior visual quality by proper filtering but they are still limited in rendering speed. On the other hand the increasing availability and programmability of graphics hardware lead to the developement of very efficient hardware-accelerated rendering methods. However, since no filtered splats are used, these approaches trade visual quality for rendering speed. In this paper we propose a rendering framework for point-based geometry providing high visual quality as well as efficient rendering. Our approach is based on a two-pass splatting technique with Gaussian filtering, resulting in a visual quality comparable to existing software rendering systems. Using programmable graphics hardware we delegate all expensive rendering tasks to the GPU, thereby minimizing data transfer and saving CPU resources. The proposed system renders up to 28M mid-quality or up to 10M high-quality surface splats per second on the latest graphics hardware.
Direct computation of a control vertex position on any subdivision level

In this paper, we present general closed form equations for directly computing the position of a vertex at different subdivision levels for both triangular and quadrilateral meshes. These results are obtained using simple computations and they lead to very useful applications, especially for adaptive subdivision. We illustrate our method on Loop's and Catmull-Clark's subdivision schemes.
A Stream Algorithm for the Decimation of Massive Meshes
We present an out-of-core mesh decimation algorithm that is able to handle input and output meshes of arbitrary size. The algorithm reads the input from a data stream in a single pass and writes the output to another stream while using only a fixed-sized in-core buffer. By applying randomized multiple choice optimization, we are able to use incremental mesh decimation based on edge collapses and the quadric error metric. The quality of our results is comparable to state-of-the-art highquality mesh decimation schemes (which are slower than our algorithm) and the decimation performance matches the performance of the most efficient out-of-core techniques (which generate meshes of inferior quality).
Freeform Shape Representations for Efficient Geometry Processing
The most important concepts for the handling and storage of freeform shapes in geometry processing applications are parametric representations and volumetric representations. Both have their specific advantages and drawbacks. While the algebraic complexity of volumetric representations S = {(x, y, z) | f (x, y, z) = 0} is independent from the shape complexity, the domain OMEGA of a parametric representation f : OMEGA to S usually has to have the same structure as the surface S itself (which sometimes makes it necessary to update the domain when the surface is modified). On the other hand, the topology of a parametrically defined surface can be controlled explicitly while in a volumetric representation, the surface topology can change accidentally during deformation. A volumetric representation reduces distance queries or inside/outside tests to mere function evaluations but the geodesic neighborhood relation between surface points is difficult to resolve. As a consequence, it seems promising to combine parametric and volumetric representations to effectively exploit both advantages. In this talk, a number of applications is presented and discussed where such a combination leads to efficient and numerically stable algorithms for the solution of various geometry processing tasks. These applications include surface remeshing, mesh fairing, global error control for mesh decimation and smoothing, and topology control for levelset surfaces.
Parameter Reduction and Automatic Generation of Active Shape Models
In this paper we propose an alternative method to build Active Shape Models. It avoids the use of explicit landmarks since it represents shapes by normal displacements relative to an average (domain) contour. By this we reduce the redundancy of the model and consequently the number of parameters in our representation. The resulting models have a significantly lower algebraic complexity compared to those based on landmarks. Additionally we show how to automate the generation of ASMs form sets of unprocessed training contours in arbitrary representation.
Efficient high quality rendering of point sampled geometry
We propose a highly efficient hierarchical representation for point sampled geometry that automatically balances sampling density and point coordinate quantization. The representation is very compact with a memory consumption of far less than 2 bits per point position which does not depend on the quantization precision. We present an efficient rendering algorithm that exploits the hierarchical structure of the representation to perform fast 3D transformations and shading. The algorithm is extended to surface splatting which yields high quality anti-aliased and water tight surface renderings. Our pure software implementation renders up to 14 million Phong shaded and textured samples per second and about 4 million anti-aliased surface splats on a commodity PC. This is more than a factor 10 times faster than previous algorithms.
Saliency of Interest Points under Scale Changes
Interest point detectors are commonly employed to reduce the amount of data to be processed. The ideal interest point detector would robustly select those features which are most appropriate or salient for the application and data at hand. There is however a tradeoff between the robustness and the discriminance of the selected features. Whereas robustness in terms of repeatability is relatively well explored, the discriminance of interest points is rarely discussed. This paper formalizes the notion of saliency and evaluates three state-of-the-art interest point detectors with respect to their capability of selecting salient image features in two recognition settings.
@inproceedings{hall2002saliency,
title={{Saliency of Interest Points under Scale Changes.}},
author={{Hall, Daniela and Leibe, Bastian and Schiele, Bernt}},
booktitle={{BMVC}},
pages={1--10},
year={2002}
}
Computer Vision-Based Gesture Tracking, Object Tracking, and 3D Reconstruction for Augmented Desks
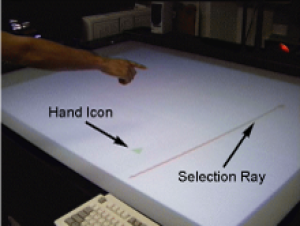
The Perceptive Workbench endeavors to create a spontaneous and unimpeded interface between the physical and virtual worlds. Its vision-based methods for interaction constitute an alternative to wired input devices and tethered tracking. Objects are recognized and tracked when placed on the display surface. By using multiple infrared light sources, the object’s 3D shape can be captured and inserted into the virtual interface. This ability permits spontaneity since either preloaded objects or those objects selected at run-time by the user can become physical icons. Integrated into the same vision-based interface is the ability to identify 3D hand position, pointing direction, and sweeping arm gestures. Such gestures can enhance selection, manipulation, and navigation tasks. The Perceptive Workbench has been used for a variety of applications, including augmented reality gaming and terrain navigation. This paper focuses on the techniques used in implementing the Perceptive Workbench and the system’s performance.
@article{starner2003perceptive,
title={{Computer Vision-Based Gesture Tracking, Object Tracking, and 3D Reconstruction for Augmented Desks}},
author={{Starner, Thad and Leibe, Bastian and Minnen, David and Westyn, Tracy and Hurst, Amy and Weeks, Justin}},
journal={{Machine Vision and Applications}},
volume={14},
number={1},
pages={59--71},
year={2003},
publisher={Springer}
}
Fast Mesh Decimation by Multiple-Choice Techniques
We present a new mesh decimation framework which is based on the probabilistic optimization technique of Multiple-Choice algorithms. While producing the same expected quality of the output meshes, the Multiple-Choice approach leads to a significant speed-up compared to the well-established standard framework for mesh decimation as a greedy optimization scheme. Moreover, Multiple-Choice decimation does not require a global priority queue data structure which reduces the memory overhead and simplifies the algorithmic structure. We explain why and how the Multiple- Choice optimization works well for the mesh decimation problem and give a detailed CPU profile analysis to explain where the speed-up comes from.
Efficient Simplification of Point-Sampled Surfaces
In this paper we introduce, analyze and quantitatively compare a number of surface simplification methods for point-sampled geometry. We have implemented incremental and hierarchical clustering, iterative simplification, and particle simulation algorithms to create approximations of point-based models with lower sampling density. All these methods work directly on the point cloud, requiring no intermediate tesselation. We show how local variation estimation and quadric error metrics can be employed to diminish the approximation error and concentrate more samples in regions of high curvature. To compare the quality of the simplified surfaces, we have designed a new method for computing numerical and visual error estimates for point-sampled surfaces. Our algorithms are fast, easy to implement, and create high-quality surface approximations, clearly demonstrating the effectiveness of point-based surface simplification.
Isosurface Reconstruction with Topology Control
Extracting isosurfaces from volumetric datasets is an essential step for indirect volume rendering algorithms. For physically measured data like it is used, e.g. in medical imaging applications one often introduces topological errors such as small handles that stem from measurement inaccuracy and cavities that are generated by tight folds of an organ. During isosurface extraction these measurement errors result in a surface whose genus is much higher than that of the actual surface. In many cases however, the topological type of the object under consideration is known beforehand, e.g., the cortex of a human brain is always homeomorphic to a sphere. By using topology preserving morphological operators we can exploit this knowledge to gradually dilate an initial set of voxels with correct topology until it fits the target isosurface. This approach avoids the formation of handles and cavities and guarantees a topologically correct reconstruction of the object's surface.
Streaming 3D Geometry Data Over Lossy Communication Channels
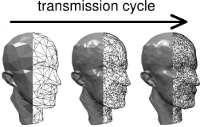
In this paper we propose a progressive 3D geometry transmission technique that is robust with respect to data loss. In a preprocessing step we decompose a given polygon mesh model into a set of overlapping ellipsoids, representing the coarse shape of the model, and a stream of sample points, representing its fine detail. On the client-side, we derive a coarse approximation of the model from the ellipsoid decomposition and then re-insert the sample points to reconstruct the fine detail. The overlapping ellipsoids as well as the sample points represent independent pieces of geometric information, hence partial data loss can be tolerated by our reconstruction algorithm and will only lead to a gradual degradation of the reconstruction quality. We present a transmission scheme that is especially well-suited for geometry broadcasting where we exploit that the order of the sample points can be arbitrarily permuted.
Multiresolution techniques
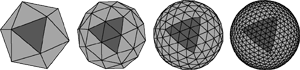
The term multiresolution techniques refers to a class of algorithms that decompose a given geometry into its global shape and detail information on different levels of resolution. The representation of an object on several levels of detail which are defined relative to each other gives rise to a number of applications that exploit the hierarchical nature of the representation. In this Chapter we explain the theoretical background of the multiresolution transform and show how the basic concepts can be generalized to arbitrary freeform surfaces.
Simplification and compression of 3D-meshes
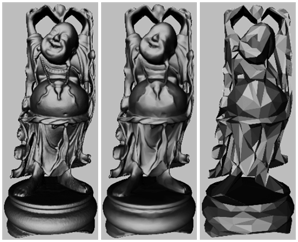
We survey recent developments in compact representations of 3D mesh data. This includes: Methods to reduce the complexity of meshes by simplification, thereby reducing the number of vertices and faces in the mesh; Methods to resample the geometry in order to optimize the vertex distribution; Methods to compactly represent the connectivity data (the graph structure defined by the edges) of the mesh; Methods to compactly represent the geometry data (the vertex coordinates) of a mesh.
Ellipsoid decomposition of 3D-models
In this paper we present a simple technique to approximate the volume enclosed by a given triangle mesh with a set of overlapping ellipsoids. This type of geometry representation allows us to approximately reconstruct 3D-shapes from a very small amount of information being transmitted. The two central questions that we address are: how can we compute optimal fitting ellipsoids that lie in the interior of a given triangle mesh and how do we select the most significant (least redundant) subset from a huge number of candidate ellipsoids. Our major motivation for computing ellipsoid decompositions is the robust transmission of geometric objects where the receiver can reconstruct the 3D-shape even if part of the data gets lost during transmission.
Towards Robust Broadcasting of Geometry Data
We present new algorithms for the robust transmission of geometric data sets, i.e. transmission which allows the receiver to recover (an approximation of) the original geometric object even if parts of the data get lost on the way. These algorithms can be considered as hinted point cloud triangulation schemes since the general manifold reconstruction problem is simplified by adding tags to the vertices and by providing a coarse base-mesh which determines the global surface topology. Robust transmission techniques exploit the geometric coherence of the data and do not require redundant transmission protocols on lower software layers. As an example application scenario we describe the teletext-like broadcasting of 3D models.
OpenMesh -- a generic and efficient polygon mesh data structure
We describe the implementation of a half-edge data structure for the static representation and dynamic handling of arbitrary polygonal meshes. The particular design of the data structures and classes aims at maximum flexibility and high performance. We achieve this by using generative programming concepts which allow the compiler to resolve most of the special case handling decisions at compile time. We evaluate our data structure based on prototypic implementations of mesh processing applications such as decimation and smoothing.
An implementation is available in the Software section.
Feature Sensitive Surface Extraction from Volume Data
The representation of geometric objects based on volumetric data structures has advantages in many geometry processing applications that require, e.g., fast surface interrogation or boolean operations such as intersection and union. However, surface based algorithms like shape optimization (fairing) or freeform modeling often need a topological manifold representation where neighborhood information within the surface is explicitly available. Consequently, it is necessary to find effective conversion algorithms to generate explicit surface descriptions for the geometry which is implicitly defined by a volumetric data set. Since volume data is usually sampled on a regular grid with a given step width, we often observe severe alias artifacts at sharp features on the extracted surfaces. In this paper we present a new technique for surface extraction that performs feature sensitive sampling and thus reduces these alias effects while keeping the simple algorithmic structure of the standard Marching Cubes algorithm. We demonstrate the effectiveness of the new technique with a number of application examples ranging from CSG modeling and simulation to surface reconstruction and remeshing of polygonal models.
An implementation is available in the Software section.
Feature Sensitive Remeshing
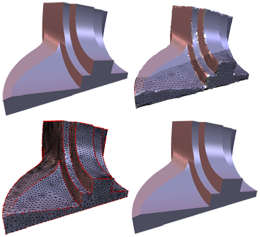
Remeshing artifacts are a fundamental problem when converting a given geometry into a triangle mesh. We propose a new remeshing technique that is sensitive to features. First, the resolution of the mesh is iteratively adapted by a global restructuring process which optimizes the connectivity. Than a particle system approach evenly distributes the vertices across the original geometry. To exactly find the features we extend the relacation procedure by an effective mechanism to attract the vertices to feature edges. The attracting force is imposed by means of a hierarchical curvature field and does not require any tresholding parameters to classify the features.
Resampling Feature and Blend Regions in Polygonal Meshes for Surface Anti-Aliasing
Efficient surface reconstruction and reverse engineering techniques are usually based on a polygonal mesh representation of the geometry: the resulting models emerge from piecewise linear interpolation of a set of sample points. The quality of the reconstruction not only depends on the number and density of the sample points but also on their alignment to sharp and rounded features of the original geometry. Bad alignment can lead to severe alias artifacts. In this paper we present a sampling pattern for feature and blend regions which minimizes these alias errors. We show how to improve the quality of a given polygonal mesh model by resampling its feature and blend regions within an interactive framework. We further demonstrate sophisticated modeling operations that can be implemented based on this resampling technique.
3D Object Recognition from Range Images using Local Feature Histograms
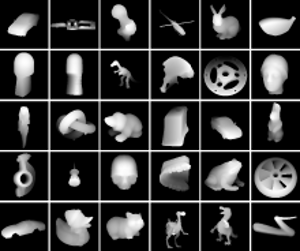
This paper explores a view-based approach to recognize free-form objects in range images. We are using a set of local features that are easy to calculate and robust to partial occlusions. By combining those features in a multidimensional histogram, we can obtain highly discriminant classifiers without the need for segmentation. Recognition is performed using either histogram matching or a probabilistic recognition algorithm. We compare the performance of both methods in the presence of occlusions and test the system on a database of almost 2000 full-sphere views of 30 free-form objects. The system achieves a recognition accuracy above 93% on ideal images, and of 89% with 20% occlusion.
@inproceedings{hetzel20013d,
title={3D Object Recognition from Range Images using Local Feature Histograms}},
author={{Hetzel, G{\"u}nter and Leibe, Bastian and Levi, Paul and Schiele, Bernt}},
booktitle={{Computer Vision and Pattern Recognition, 2001. CVPR 2001. Proceedings of the 2001 IEEE Computer Society Conference on}},
volume={2},
pages={II--394},
year={2001},
organization={IEEE}
}
Local Feature Histograms for Object Recognition from Range Images
In this paper, we explore the use of local feature histograms for view-based recognition of free-form objects from range images. Our approach uses a set of local features that are easy to calculate and robust to partial occlusions. By combining them in a multidimensional histogram, we can obtain highly discriminative classi ers without having to solve a segmentation problem. The system achieves above 91% recognition accuracy on a database of almost 2000 full-sphere views of 30 free-form objects, with only minimal space requirements. In addition, since it only requires the calculation of very simple features, it is ex- tremely fast and can achieve real-time recognition performance.
@article{leibe2001local,
title={Local feature histograms for object recognition from range images},
author={Leibe, Bastian and Hetzel, G{\"u}nter and Levi, Paul},
year={2001}
}
Integration of Wireless Gesture Tracking, Object Tracking, and 3D Reconstruction in the Perceptive Workbench
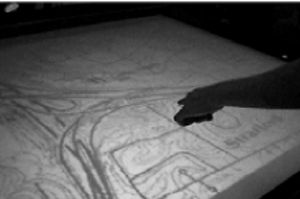
The Perceptive Workbench endeavors to create a spontaneous and unimpeded interface between the physical and virtual worlds. Its vision-based methods for interaction constitute an alternative to wired input devices and tethered tracking. Objects are recognized and tracked when placed on the display surface. By using multiple infrared light sources, the object’s 3D shape can be captured and inserted into the virtual interface. This ability permits spontaneity since either preloaded objects or those objects selected at run-time by the user can become physical icons. Integrated into the same vision-based interface is the ability to identify 3D hand position, pointing direction, and sweeping arm gestures. Such gestures can enhance selection, manipulation, and navigation tasks. In previous publications, the Perceptive Workbench has demonstrated its utility for a variety of applications, including augmented reality gaming and terrain navigation. This paper will focus on the implementation and performance aspects and will introduce recent enhancements to the system.
@incollection{leibe2001integration,
title={{Integration of Wireless Gesture Tracking, Object Tracking, and 3D Reconstruction in the Perceptive Workbench}},
author={{Leibe, Bastian and Minnen, David and Weeks, Justin and Starner, Thad}},
booktitle={{Computer Vision Systems}},
pages={73--92},
year={2001},
publisher={Springer}
}
A Robust Procedure to Eliminate Degenerate Faces from Triangle Meshes
When using triangle meshes in numerical simulations or other sophisticated downstream applications, we have to guarantee that no degenerate faces are present since they have, e.g., no well defined normal vectors. In this paper we present a simple but effective algorithm to remove such artifacts from a given triangle mesh. The central problem is to make this algorithm numerically robust because degenerate triangles are usually the source for all kinds of numerical instabilities. Our algorithm is based on a slicing technique that cuts a set of planes through the given polygonal model. The mesh slicing operator only uses numerically stable predicates and therefore is able to split faces in a controlled manner. In combination with a custom tailored mesh decimation scheme we are able to remove the degenerate faces from meshes like those typically generated by tesselation units in CAD systems.
Sqrt(3) subdivision

A new stationary subdivision scheme is presented which performs slower topological refinement than the usual dyadic split operation. The number of triangles increases in every step by a factor of 3 instead of 4. Applying the subdivision operator twice causes a uniform refinement with tri-section of every original edge (hence the name sqrt(3)-subdivision) while two dyadic splits would quad-sect every original edge. Besides the finer gradation of the hierarchy levels, the new scheme has several important properties: The stencils for the subdivision rules have minimum size and maximum symmetry. The smoothness of the limit surface is C2 everywhere except for the extraordinary points where it is C1. The convergence analysis of the scheme is presented based on a new general technique which also applies to the analysis of other subdivision schemes. The new splitting operation enables locally adaptive refinement under built-in preservation of the mesh consistency without temporary crack-fixing between neighboring faces from different refinement levels. The size of the surrounding mesh area which is affected by selective refinement is smaller than for the dyadic split operation. We further present a simple extension of the new subdivision scheme which makes it applicable to meshes with boundary and allows us to generate sharp feature lines.
Towards Hardware Implementation Of Loop Subdivision
We present a novel algorithm to evaluate and render Loop subdivision surfaces. The algorithm exploits the fact that Loop subdivision surfaces are piecewise polynomial and uses the forward difference technique for efficiently computing uniform samples on the limit surface. The main advantage of our algorithm is that it only requires a small and constant amount of memory that does not depend on the subdivision depth. The simple structure of the algorithm enables a scalable degree of hardware implementation. By low-level parallelization of the computations, we can reduce the critical computation costs to a theoretical minimum of about one float[3]-operation per triangle.
Geometric Modeling Based on Polygonal Meshes

While traditional computer aided design (CAD) is mainly based on piecewise polynomial surface representations, the recent advances in the efficient handling of polygonal meshes have made available a set of powerful techniques which enable sophisticated modeling operations on freeform shapes. In this tutorial we are going to give a detailed introduction into the various techniques that have been proposed over the last years. Those techniques address important issues such as surface generation from discrete samples (e.g. laser scans) or from control meshes (ab initio design); complexity control by adjusting the level of detail of a given 3D-model to the current application or to the available hardware resources; advanced mesh optimization techniques that are based on the numerical simulation of physical material (e.g. membranes or thin plates) and finally the generation and modification of hierarchical representations which enable sophisticated multiresolution modeling functionality. We present an interactive system for the generation of high quality triangle meshes that allows us to handle hybrid geometry (point clouds, polygons,...) as input data. In order to be able to robustly process huge data sets, we exploit graphics hardware features like the raster manager and the z-buffer for specific sub-tasks in the overall procedure. By this we significantly accelerate the stitching of mesh patches and obtain an algorithm for sub-sampling the data points in linear time. The target resolution and the triangle alignment in sub-regions of the resulting mesh can be controlled by adjusting the screen resolution and viewing transformation. An intuitive user interface provides a flexible tool for application dependent optimization of the mesh.
An interactive approach to point cloud triangulation

We present an interactive system for the generation of high quality triangle meshes that allows us to handle hybrid geometry (point clouds, polygons,...) as input data. In order to be able to robustly process huge data sets, we exploit graphics hardware features like the raster manager and the z-buffer for specific sub-tasks in the overall procedure. By this we significantly accelerate the stitching of mesh patches and obtain an algorithm for sub-sampling the data points in linear time. The target resolution and the triangle alignment in sub-regions of the resulting mesh can be controlled by adjusting the screen resolution and viewing transformation. An intuitive user interface provides a flexible tool for application dependent optimization of the mesh.
Multiresolution shape deformations for meshes with dynamic vertex connectivity
Multiresolution shape representation is a very effective way to decompose surface geometry into several levels of detail. Geometric modeling with such representations enables flexible modifications of the global shape while preserving the detail information. Many schemes for modeling with multiresolution decompositions based on splines, polygonal meshes and subdivision surfaces have been proposed recently. In this paper we modify the classical concept of multiresolution representation by no longer requiring a global hierarchical structure that links the different levels of detail. Instead we represent the detail information implicitly by the geometric difference between independent meshes. The detail function is evaluated by shooting rays in normal direction from one surface to the other without assuming a consistent tessellation. In the context of multiresolution shape deformation, we propose a dynamic mesh representation which adapts the connectivity during the modification in order to maintain a prescribed mesh quality. Combining the two techniques leads to an efficient mechanism which enables extreme deformations of the global shape while preventing the mesh from degenerating. During the deformation, the detail is reconstructed in a natural and robust way. The key to the intuitive detail preservation is a transformation map which associates points on the original and the modified geometry with minimum distortion. We show several examples which demonstrate the effectiveness and robustness of our approach including the editing of multiresolution models and models with texture.
Toward Spontaneous Interaction with the Perceptive Workbench
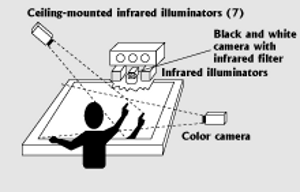
Until now, we have interacted with computers mostly by using wire-based devices. Typically, the wires limit the distance of movement and inhibit freedom of orientation. In addition, most interactions are indirect. The user moves a device as an analog for the action created in the display space. We envision an untethered interface that accepts gestures directly and can accept any objects we choose as interactors. We discuss methods for producing more seamless interaction between the physical and virtual environments through the Perceptive Workbench. We applied the system to an augmented reality game and a terrain navigating system. The Perceptive Workbench can reconstruct 3D virtual representations of previously unseen real-world objects placed on its surface. In addition, the Perceptive Workbench identifies and tracks such objects as they are manipulated on the desk's surface and allows the user to interact with the augmented environment through 2D and 3D gestures
@article{leibe2000toward,
title={{Toward Spontaneous Interaction with the Perceptive Workbench}},
author={{Leibe, Bastian and Starner, Thad and Ribarsky, William and Wartell, Zachary and Krum, David and Weeks, Justin and Singletary, Bradley and Hedges, L},
journal={{Computer Graphics and Applications, IEEE}},
volume={20},
number={6},
pages={54--65},
year={2000},
publisher={IEEE}
}
The Perceptive Workbench: Toward Spontaneous Interaction in Semi-Immersive Virtual Environments
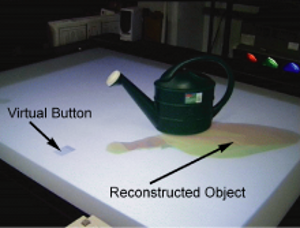
The Perceptive Workbench enables a spontaneous, natural, and unimpeded interface between the physical and virtual worlds. It uses vision-based methods for interaction that eliminate the need for wired input devices and wired tracking. Objects are recognized and tracked when placed on the display surface. Through the use of multiple light sources, the objectÕs 3D shape can be captured and inserted into the virtual interface. This ability permits spontaneity since either preloaded objects or those objects selected on the spot by the user can become physical icons. Integrated into the same vision-based interface is the ability to identify 3D hand position, pointing direction, and sweeping arm gestures. Such gestures can enhance selection, manipulation, and navigation tasks. In this paper, the Perceptive Workbench is used for augmented reality gaming and terrain navigation applications, which demonstrate the utility and capability of the interface.
@inproceedings{leibe2000perceptive,
title={{The Perceptive Workbench: Toward Spontaneous Interaction in Semi-Immersive Virtual Environments}},
author={{Leibe, Bastian and Starner, Thad and Ribarsky, William and Wartell, Zachary and Krum, David and Singletary, Brad and Hodges, Larry}},
booktitle={{Natural Interaction in Semi Immersive Virtual Environments, in Proceedings of IEEE Virtual Reality 2000}},
year={2000},
organization={Citeseer}
}
MIND-WARPING: Towards Creating a Compelling Collaborative Augmented Reality Game

Computer gaming offers a unique test-bed and market for advanced concepts in computer science, such as Human Computer Interaction (HCI), computer-supported collaborative work (CSCW), intelligent agents, graphics, and sensing technology. In addition, computer gaming is especially wellsuited for explorations in the relatively young fields of wearable computing and augmented reality (AR). This paper presents a developing multi-player augmented reality game, patterned as a cross between a martial arts fighting game and an agent controller, as implemented using the Wearable Augmented Reality for Personal, Intelligent, and Networked Gaming (WARPING) system. Through interactions based on gesture, voice, and head movement input and audio and graphical output, the WARPING system demonstrates how computer vision techniques can be exploited for advanced, intelligent interfaces.
@inproceedings{starner2000mind,
title={{MIND-WARPING: towards creating a compelling collaborative augmented reality game}},
author={{Starner, Thad and Leibe, Bastian and Singletary, Brad and Pair, Jarrell}},
booktitle={{Proceedings of the 5th international conference on Intelligent user interfaces}},
pages={256--259},
year={2000},
organization={ACM}
}
Geometric Fairing of Irregular Meshes for Free-Form Surface Design
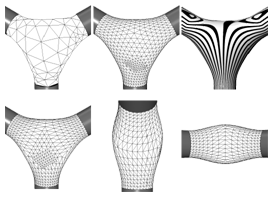
In this paper we present a new algorithm for smoothing arbitrary triangle meshes while satisfying G^1 boundary conditions. The algorithm is based on solving a non-linear fourth order partial differential equation (PDE) that onlydepends on intrinsic surface properties instead of being derived from a particular surface parameterization. This continuous PDE has a (representation-independent) well-defined solution which we approximate by our triangle mesh. Hence, changing the mesh complexity (refinement) or the mesh connectivity (remeshing) lead to just another discretization of the same smooth surface and doesn't affect the resulting geometric shape beyond this. This is typically not true for filter-based mesh smoothing algorithms. To simplify the computation we factorize the fourth order PDE into a set of two nested second order problems thus avoiding the estimation of higher order derivatives. Further acceleration is achieved by applying multigrid techniques on a fine-to-coarse hierarchical mesh representation.
Line-art rendering of 3D-models
We present an interactive system for computer aided generation of line art drawings to illustrate 3D models that are given as triangulated surfaces. In a preprocessing step an enhanced 2D view of the scene is computed by sampling for every pixel the shading, the normal vectors and the principal directions obtained from discrete curvature analysis. Then streamlines are traced in the 2D direction fields and are used to define line strokes. In order to reduce noise artifacts the user may interactively select sparse reference lines and the system will automatically fill in additional strokes. By exploiting the special structure of the streamlines an intuitive and simple tone mapping algorithm can be derived to generate the final rendering.
Feature Sensitive Sampling for Interactive Remeshing
We present a technique for remeshing irregular triangles meshes where the distribution and alignment can be adapted to the underlying geometry. Following the interactive virtual range scanner approach we overcome aliasing problems by introducing a special sampling technique. A sampling grid that can be aligned to the local features of the mesh is constructed interactively in an intuitive way and without adding reasonable overhead to the virtual scanning process.
Generating fair meshes with G¹ boundary conditions
In this paper we present a new algorithm to create fair discrete surfaces satisfying prescribed G1 boundary constraints. All surfaces are built by discretizing a partial differential equation based on pure geometric intrinsics. The construction scheme is designed to produce meshes that are partitioned into regular domains. Using this knowledge in advance we can develop a fast iterative algorithm resulting in surfaces of high aesthetic quality that have no local mean curvature extrema in the interior.
Extraction of feature lines on triangulated surfaces using morphological operators
Triangle meshes are a popular representation of surfaces in computer graphics. Our aim is to detect feature on such surfaces. Feature regions distinguish themselves by high curvature. We are using discrete curvature analysis on triangle meshes to obtain curvature values in every vertex of a mesh. These values are then thresholded resulting in a so called binary feature vector. By adapting morphological operators to triangle meshes, noise and artifacts can be removed from the feature. We introduce an operator that determines the skeleton of the feature region. This skeleton can then be converted into a graph representing the desired feature. Therefore a description of the surface's geometrical characteristics is constructed.
Discrete Fairing and Variational Subdivision for Freeform Surface Design
The representation of free-form surfaces by sufficiently refined polygonal meshes has become common in many geometric modeling applications where complicated objects have to be handled. While working with triangle meshes is flexible and efficient, there are difficulties arising prominently from the lack of infinitesimal smoothness and the prohibitive complexity of highly detailed 3D-models. In this paper we discuss the generation of fair triangle meshes which are optimal with respect to some discretized curvature energy functional. The key issues are the proper definition of discrete curvature, the smoothing of high resolution meshes by solving a sparse linear system that characterizes the global minimum of an energy functional. Results and techniques from differential geometry, variational surface design (fairing), and numerical analysis are combined to find efficient and robust algorithms that generate smooth meshes of arbitrary topology which interpolate or approximate a given set of data points.
Hierarchical solutions for the deformable surface problem in visualization
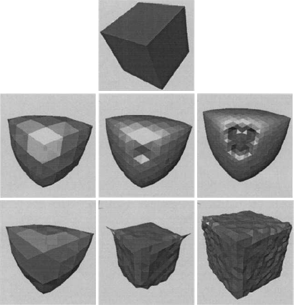
In this paper we present a hierarchical approach for the deformable surface technique. This technique is a three dimensional extension of the snake segmentation method. We use it in the context of visualizing three dimensional scalar data sets. In contrast to classical indirect volume visualization methos, this reconstruction is not based on iso-values but on boundary information derived from discontinuities in the data. We propose a mulitlevel adaptive finite difference solver, which generates a target surface minimizing an energy functional based on an internal energy of the surface and an outer energy induced by the gradient of the volume. The method is attractive for preprocessing in numerical simulation or texture mapping. Red-green triangulation allows adaptive refinement of the mesh. Special considerations help to prevent self interpenetration of the surfaces. We will also show some techniques that introduce the hierarchical aspect into the inhomogeneity of the partial differential equation. The approach proves to be appropriate for data sets that contain a collection of objects separated by distinct boundaries. Thes kind of data sets often occur in medical and technical tomography, as we will demonstrate in a few examples.
A Shrink Wrapping Approach to Remeshing Polygonal Surfaces
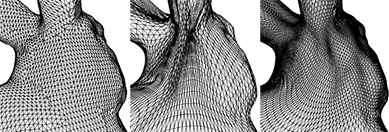
Due to their simplicity and flexibility, polygonal meshes are about to become the standard representation for surface geometry in computer graphics applications. Some algorithms in the context of multiresolution representation and modeling can be performed much more efficiently and robustly if the underlying surface tesselations have the special subdivision connectivity. In this paper, we propose a new algorithm for converting a given unstructured triangle mesh into one having subdivision connectivity. The basic idea is to simulate the shrink wrapping process by adapting the deformable surface technique known from image processing. The resulting algorithm generates subdivision connectivity meshes whose base meshes only have a very small number of triangles. The iterative optimization process that distributes the mesh vertices over the given surface geometry guarantees low local distortion of the triangular faces. We show several examples and applications including the progressive transmission of subdivision surfaces.
Discrete fairing of curves and surfaces based on linear curvature distribution
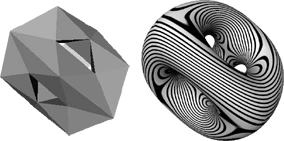
In the planar case, one possibility to create a high quality curve that interpolates a given set of points is to use a clothoid spline, which is a curvature continuous curve with linear curvature segments. In the first part of the paper we develop an efficient fairing algorithm that calculates the discrete analogon of a closed clothoid spline. In the second part we show how this discrete linear curvature concept can be extended to create a fairing scheme for the construction of a triangle mesh that interpolates the vertices of a given closed polyhedron of arbitrary topology.
Multiresolution Hierarchies on Unstructured Triangle Meshes
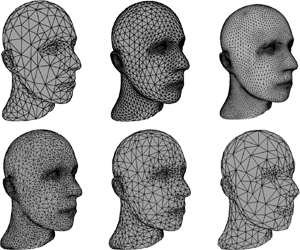
The use of polygonal meshes for the representation of highly complex geometric objects has become the de facto standard in most computer graphics applications. Especially triangle meshes are preferred due to their algorithmic simplicity, numerical robustness, and efficient display. The possibility to decompose a given triangle mesh into a hierarchy of differently detailed approximations enables sophisticated modeling operations like the modification of the global shape under preservation of the detail features. So far, multiresolution hierarchies have been proposed mainly for meshes with subdivision connectivity. This type of connectivity results from iteratively applying a uniform split operator to an initially given coarse base mesh. In this paper we demonstrate how a similar hierarchical structure can be derived for arbitrary meshes with no restrictions on the connectivity. Since smooth (subdivision) basis functions are no longer available in this generalized context, we use constrained energy minimization to associate smooth geometry with coarse levels of detail. As the energy minimization requires one to solve a global sparse system, we investigate the effect of various parameters and boundary conditions in order to optimize the performance of iterative solving algorithms. Another crucial ingredient for an effective multiresolution decomposition of unstructured meshes is the flexible representation of detail information. We discuss several approaches.
Robust Multi-Band Detail Encoding for Triangular Meshes of Arbitrary Connectivity
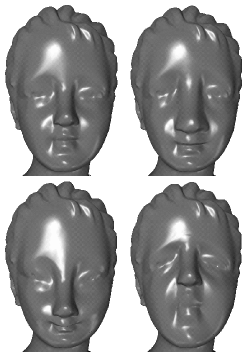
The flexibility coming along with the simplicity of their base primitive and the support by todays graphics hardware, have made triangular meshes more and more popular for representing complex 3D objects. Due to the complexity of realistic datasets, a considerable amount of work has been spent during the last years to provide means for the modification of a given mesh by intuitive metaphors, i.e. large scale edits under preservation of the detail features. In this paper we demonstrate how a hierarchical structure of a mesh can be derived for arbitrary meshes to enable intuitive modifications without restrictions on the underlying connectivity, known from existing subdivision approaches. We combine mesh reduction algorithms and constrained energy minimization to decompose the given mesh into several frequency bands. Therefore, a new stabilizing technique to encode the geometric difference between the levels will be presented.
Approximation and Visualization of Discrete Curvature on Triangulated Surfaces
Triangle meshes are a facile and effective representation for many kinds of surfaces. In order to rate the quality of a surface, the calculation of geometric curvatures as there are defined for smooth surfaces is useful an necessary for a variety of applications. We investigate an approach to locally approximate the first and second fundamental forms at every (inner) vertex of a triangle mesh. We use locally isometric divided difference operators, where we compare two variants of parameterizations (tangent plane and exponential map) by testing on elementary analytic surfaces. We further describe a technique for visualizing the resulting curvature data. A simple median filter is used to effectively filter noise from the input data. According to application dependent requirements a global or a pervertex local color coding can be provided. The user may interactively modify the color transfer function, enabling him or her to visually evaluate the quality of triangulated surfaces.
Real-time Exploration of Regular Volume Data by Adaptive Reconstruction of Iso-Surfaces
We propose an adaptive approach for the fast reconstruction of isosurfaces from regular volume data at arbitrary levels of detail. The algorithm has been designed to enable real-time navigation through complex structures while providing user-adjustable resolution levels. Since adaptive on-the-fly reconstruction and rendering is performed from a hierarchical octree representation of the volume data, the method does not depend on preprocessing with respect to a specific isovalue, thus the user can browse interactively through the set of all possible isosurfaces. Special attention is paid to the fixing of cracks in the surface where the adaptive reconstruction level changes and to the efficient estimation of the isosurface's curvature.
Interactive Multi-Resolution Modeling on Arbitrary Meshes
During the last years the concept of multi-resolution modeling has gained special attention in many fields of computer graphics and geometric modeling. In this paper we generalize powerful multiresolution techniques to arbitrary triangle meshes without requiring subdivision connectivity. Our major observation is that the hierarchy of nested spaces which is the structural core element of most multi-resolution algorithms can be replaced by the sequence of intermediate meshes emerging from the application of incremental mesh decimation. Performing such schemes with local frame coding of the detail coefficients already provides effective and efficient algorithms to extract multi-resolution information from unstructured meshes. In combination with discrete fairing techniques, i.e., the constrained minimization of discrete energy functionals, we obtain very fast mesh smoothing algorithms which are able to reduce noise from a geometrically specified frequency band in a multiresolution decomposition. Putting mesh hierarchies, local frame coding and multi-level smoothing together allows us to propose a flexible and intuitive paradigm for interactive detail-preserving mesh modification. We show examples generated by our mesh modeling tool implementation to demonstrate its functionality.
Ray Tracing of subdivision surfaces
We present the necessary theory for the integration of subdivision surfaces into general purpose rendering systems. The most important functionality that has to be provided via an abstract geometry interface are the computation of surface points and normals as well as the ray intersection test. We demonstrate how to derive the corresponding formulas and how to construct tight bounding volumes for subdivision surfaces. We introduce envelope meshes which have the same topology as the control meshes but tightly circumscribe the limit surface. An efficient and simple algorithm is presented to trace a ray recursively through the forest of triangles emerging from adaptive refinement of an envelope mesh.
A Multiresolution Framework for Variational Subdivision
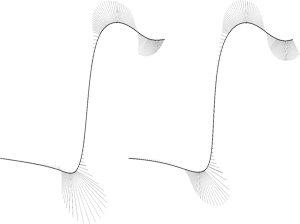
Subdivision is a powerful paradigm for the generation of curves and surfaces. It is easy to implement, computationally efficient, and useful in a variety of applications because of its intimate connection with multiresolution analysis. An important task in computer graphics and geometric modeling is the construction of curves that interpolate a given set of points and minimize a fairness functional (variational design). In the context of subdivision, fairing leads to special schemes requiring the solution of a banded linear system at every subdivision step. We present several examples of such schemes including one that reproduces non-uniform interpolating cubic splines. Expressing the construction in terms of certain elementary operationswe are able to embed variational subdivision in the lifting framework, a powerful technique to construct wavelet filter banks given a subdivision scheme. This allows us to extend the traditional lifting scheme for FIR filters to a certain class of IIR filters. Consequently we show how to build variationally optimal curves and associated, stable wavelets in a straightforward fashion. The algorithms to perform the corresponding decomposition and reconstruction transformations are easy to implement and efficient enough for interactive applications.
Directed Edges - A Scalable Representation For Triangle Meshes
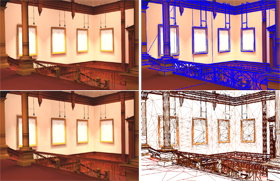
In a broad range of computer graphics applications the representation of geometric shape is based on triangle meshes. General purpose data structures for polygonal meshes typically provide fast access to geometric objects (e.g. points) and topologic entities (e.g. neighborhood relation) but the memory requirements are rather high due to the many special configurations. In this paper we present a new data structure which is specifically designed for triangle meshes. The data structure enables to trade memory for access time by either storing internal references explicitly or by locally reconstructing them on demand. The trade-off can be hidden from the programmer by an object-oriented API and automatically adapts to the available hardware resources or the complexity of the mesh (scalability).
Enhancing Digital Documents by Including 3D-Models
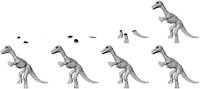
Due to their simplicity, triangle meshes are used to represent geometric objects in many applications. Since the number of triangles often goes beyond the capabilities of computer graphics hardware and the transmission time of such data is often inappropriately high, a large variety of mesh simplification algorithms has been proposed in the last years. In this paper we identify major requirements for the practical usability of general purpose mesh reduction algorithms to enable the integration of triangle meshes into digital documents. The driving idea is to understand mesh reduction algorithms as a software extension to make more complex meshes accessible with limited hardware resources (regarding both transmission and display). We show how these requirements can be efficiently satisfied and discuss implementation aspects in detail. We present a mesh decimation scheme that fulfills these design goals and which has already been evaluated by several users from different application areas. We apply this algorithm to typical mesh data sets to demonstrate its performance.
Efficient Generation of Hierarchical Triangle Meshes
Density Estimation on Delaunay Triangulations
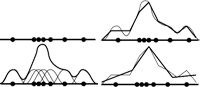
Density Estimation is a very popular method to compute global illumination solutions in a complex virtual scene. After simulating the reflection paths of a large number of photons in the scene, the illumination at a surface point is approximated by estimating the density of photon hits in the point's surrounding. In this paper we describe a novel approach to compute such a density approximation based on Delaunay triangulation and mesh modification techniques.
Using the Discrete Fourier-Transform to Analyze the Convergence of Subdivision Schemes

While the continuous Fourier transform is a well-established standard tool for the analysis of subdivision schemes, we present a new technique based on the discrete Fourier transform instead. We first prove a very general convergence criterion for arbitrary interpolatory schemes, i.e., for non-stationary, globally supported or even non-linear schemes. Then we use the discrete Fourier transform as an algebraic tool to transform subdivision schemes into a form suitable for the analysis. This allows us to formulate simple and numerically stable sufficient criteria for the convergence of subdivision schemes of very general type. We analyze some example schemes to illustrate the resulting easy-to-apply criteria which merely require to numerically estimate the maximum of a smooth function on a compact interval.
Dreiecksbeziehungen
A general framework for mesh decimation
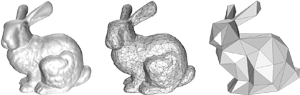
The decimation of highly detailed meshes has emerged as an important issue in many computer graphics related fields. A whole library of different algorithms has been proposed in the literature. By carefully investigating such algorithms, we can derive a generic structure for mesh reduction schemes which is analogous to a class of greedy-algorithms for heuristic optimization. Particular instances of this algorithmic template allow to adapt to specific target applications.We present a new mesh reduction algorithmwhich clearly reflects this meta scheme and efficiently generates decimated high quality meshes while observing global error bounds.
Fairing by Finite Difference Methods
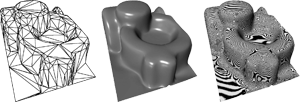
We propose an efficient and flexible scheme to fairly interpolate or approximate the vertices of a given triangular mesh. Instead of generating a piecewise polynomial representation, our output will be a refined mesh with vertices lying densely on a surface with minimum bending energy. To obtain those, we generalize the finite differences technique to parametric meshes. The use of local parameterizations (charts) makes it possible to cast the minimization of non-linear geometric functionals into solving a sparse linear system. Efficient multi-grid solvers can be applied which leads to fast algorithms that generate surfaces of high quality.
Variational Design with Parametric Meshes of Arbitrary Topology
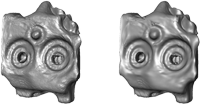
Many mathematical problems in geometric modeling are merely due to the difficulties of handling piecewise polynomial parameterizations of surfaces (e.g., smooth connection of patches, evaluation of geometric fairness measures). Dealing with polygonal meshes is mathematically much easier although infinitesimal smoothness can no longer be achieved. However, transferring the notion of fairness to the discrete setting of triangle meshes allows to develop very efficient algorithms for many specific tasks within the design process of high quality surfaces. The use of discrete meshes instead of continuous spline surfaces is tolerable in all applications where (on an intermediate stage) explicit parameterizations are not necessary. We explain the basic technique of discrete fairing and give a survey of possible applications of this approach.
Deformable Surfaces for Feature Based Indirect Volume Rendering
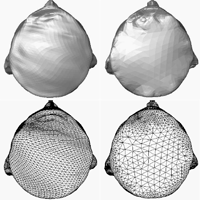
In this paper we present an indirect volume visualization method, based on the deformable surface model, which is a three dimensional extension of the snake segmentation method. In contrast to classical indirect volume visualization methods, this model is not based on iso-values but on boundary information. Physically speaking it simulates a combination of a thin plate and a rubber skin, that is influenced by forces implied by feature information extracted from the given data set. The approach proves to be appropriate for data sets that represent a collection of objects separated by distinct boundaries. These kind of data sets often occur in medical and technical tomography, as we will demonstrate by a few examples. We propose a multilevel adaptive finite difference solver, which generates a target surface minimizing an energy functional based on an internal energy of the surface and an outer energy induced by the gradient of the volume. This functional tends to produce very regular triangular meshes compared to results of the marching cubes algorithm. It makes this method attractive for meshing in numerical simulation or texture mapping. Red-green triangulation allows an adaptive refinement of the mesh. Special considerations have been made to prevent self inter-penetration of the surfaces.
Using Subdivision on Hierarchical Data to Reconstruct Radiosity Distribution

Computing global illumination by finite element techniques usually generates a piecewise constant approximation of the radiosity distribution on surfaces. Directly displaying such scenes generates artefacts due to discretization errors.We propose to remedy this drawback by considering the piecewise constant output to be samples of a (piecewise) smooth function in object space and reconstruct this function by applying a binary subdivision scheme. We design custom taylored subdivision schemes with quadratic precision for the efficient refinement of cell- or pixeltype data. The technique naturally allows to reconstruct functions from non-uniform samples which result from adaptive binary splitting of the original domain (quadtree). This type of output is produced, e.g., by hierarchical radiosity algorithms. The result of the subdivision process can be mapped as a texture on the respective surface patch which allows to exploit graphics hardware for considerably accelerating the display.
Iterative Mesh Generation for FE-Computations on Free Form Surfaces
We present an interpolatory subdivision scheme to generate adaptiely refined quadrilateral meshes which approximate a smooth surface of arbitrary topology. The described method significantly differs from classical mesh generation techniques based on spline surfaces or implicit representations since no explicit description of the limit surface is used. Instead, simple affine combinations are applied to compute new vertices if a face of the net is split. These rules are designed to guarantee asymptotic smoothness, i.e., the sequence of refined nets converges to a smooth limit surface. Subdivision techniques are useful mainly in applications where a given quadrilateral net is a coarse approximation of a surface and points on a refined grid have to be estimated. To evaluate our approach, we show examples for FE-computations on surfaces generated by this algorithm.
Stable Evaluation of Box-Splines
The most elegant way to evaluate box-splines is by using their recursive definition. However, a straightforward implementation reveals numerical difficulties. A careful analysis of the algorithm allows a reformulation which overcomes these problems without losing efficiency. A concise vectorized MATLAB-implementation is given.
Discrete Fairing
We address the general problem of, given a triangular net of arbitrary topology in IR3 , nd a re ned net which contains the original vertices and yields an improved approximation of a smooth and fair interpolating surface. The (topological) mesh re nement is performed by uniform subdivision of the original triangles while the (geometric) position of the newly inserted vertices is determined by variational methods, i.e., by the minimization of a functional measuring a discrete approximation of bending energy. The major problem in this approach is to nd an appropriate parameterization for the re ned net's vertices such that second divided di erences (derivatives) tightly approximate intrinsic curvatures. We prove the existence of a unique optimal solution for the minimization of discrete functionals that involve squared second order derivatives. Finally, we address the e cient computation of fair nets.
Robust and Efficient Evaluation of Functionals on Parametric Surfaces
Interpolatory Subdivision on Open Quadrilateral Nets with Arbitrary Topology
A simple interpolatory subdivision scheme for quadrilateral nets with arbitrary topology is presented which generates C1 surfaces in the limit. The scheme satisfies important requirements for practical applications in computer graphics and engineering. These requirements include the necessity to generate smooth surfaces with local creases and cusps. The scheme can be applied to open nets in which case it generates boundary curves that allow a C0-join of several subdivision patches. Due to the local support of the scheme, adaptive refinement strategies can be applied. We present a simple device to preserve the consistency of such adaptively refined nets.
A Variational Approach to Subdivision
In this paper a new class of interpolatory refinement schemes is presented which in every refinement step determine the new points by solving an optimization problem. In general, these schemes are global, i.e., every new point depends on all points of the polygon to be refined. By choosing appropriate quadratic functionals to be minimized iteratively during refinement, very efficient schemes producing limiting curves of high smoothness can be defined. The well known class of stationary interpolatory refinement schemes turns out to be a special case of these variational schemes.
Interpolatory Refinement is Low Pass Filtering
A new technique to analyse the convergence behavior of interpolatory refinement schemes is presented. The refinement schemes are considered as discrete low pass filters and the convergence analysis is done in the frequency domain. The class of subdivision schemes covered by this approach includes the stationary subdivision schemes but also a very general class of refinement schemes with global dependence of the new points form the old. The filter formalism can be used for both, the analysis and the construction of refinement schemes.
Approximating the length of a spline by its control polygon
Interpolatory refinement by variational methods
Using Simulated Annealing to Obtain Good Nodal Approximations of Deformable Bodies
In this paper we present a method to obtain good approximations of deformable bodies with spring/mass systems. An iterative algorithm based on voronoi diagrams is used to get a good mass distribution. The elastic properties of the system are optimized by simulated annealing. Results are shown, and some applications are discussed.
Convergence of subdivision and degree elevation
This paper presents a short, simple, and general proof showing that the control polygons generated by subdivision and degree elevation converge to the underlying splines, box-splines, or multivariate Bézier polynomials, respectively. The proof is based only on a Taylor expansion. Then the results are carried over to rational curves and surfaces. Finally, an even shorter but as simple proof is presented for the fact that subdivided Bézier polygons converge to the corresponding curve.
A Fast Dot-Product Algorithm with Minimal Rounding Errors
We present a new algorithm which computes dot-products of arbitrary length with minimal rounding errors, independent of the number of addends. The algorithm has an O(n) time and O(1) memory complexity and does not need extensions of the arithmetic kernel, i.e., usual floating-point operations. A slight modification yields an algorithm which computes the dot-product in machine precision. Due to its simplicity, the algorithm can easily be implemented in hardware.
